18122393143
18122393143
 18122393143
18122393143

聚焦行业热点资讯 走在新基建建设前沿




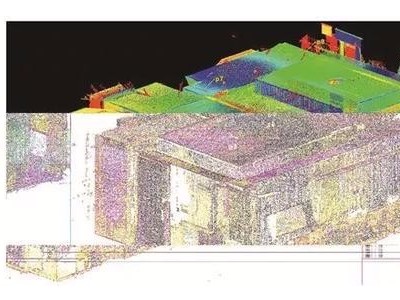
以三维激光扫描雷达获取精确的室内点云数据为研究对象,提出了一种快速、准确的提取点云中的建模信息和各模型相互关系的方法,对室内三维场景进行重建。首先对室内场景进行多站三维激光扫描,对获得的三维激光点云数据进行预处理、配准得到整体的点云模型,然后进行截取取得截面图,对截面图进行重绘测...

随着上世纪九十年代,三维激光扫描技术的出现,点云概念开始被提及。 点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。 当我们利用三维激光扫描仪扫描某一建筑表面时,我们可以得到大量密集的点,这些点带有三维坐标(XYZ)、激光反射强度和和颜色信息(RGB)等信息,它们...