
 18122393143
18122393143
 18122393143
18122393143

聚焦行业热点资讯 走在新基建建设前沿
城市大比例尺地形图测绘主要采用全野外数字化测量方法,效率低、劳动强度大。随着无人机倾斜摄影测量技术的飞速发展,采用该技术开展大比例尺地形图测绘成为探索和试验的热点课题。利用无人机倾斜摄影成果—数字正射影像和实景三维模型数据,采用二三维联动一体化测量软件,实现地理要素的测绘和更新。以济南市商河县老城区30km 1 ∶500 比例尺地形图更新为例,总结该技术应用于大比例尺地形图测绘的技术流程和技术优势。
1 引言
作为一项基础性测绘工作,大比例尺地形图测绘在城市规划建设、地籍与房产测量、工程施工测量等领域均发挥重要作用[1,2]。目前主流的大比例尺地形图测绘方式有全野外数字化测图方法、航空摄影测量方法。全野外数字化测图方法[3]外业工作量大,内业数据处理复杂,从而导致数据作业周期长、更新速度慢等弊端。传统航空摄影测量方法[4]主要用于1∶2000比例尺地形图的测绘,对于1∶500比例尺地形图,成果精度难以控制,特别是地形高程信息,一般需要采用全野外测绘的方式进行补测。
近几年,无人机航摄系统以其操作便捷、成本低、机动性强等特点,迅速得到推广应用。利用无人机航摄系统进行大比例尺地形图测绘,继承了无人机航摄技术特点,大幅提高大比例尺地形图的更新效率,成为目前研究的热门课题[5,6]。目前利用无人机航摄系统进行大比例尺地形图测绘主要以无人机航飞正射影像图为底图,内业编辑成图后辅以外业补绘调绘完成。受二维影像数据自身局限性限制,内业数据采集过程中存在大量不可确定的信息,如建筑物层数、房檐改正距离等,需要通过外业补绘调绘完成[7,8]。无人机倾斜摄影技术的发展,使得成果数据从二维空间升级至三维空间,可全方位、立体化还原地物特征,进一步减少外业工作量,加快数据采集速度。
本文以无人机倾斜摄影测量成果为基础,采用二三维联动一体化测图模式,进行大比例尺地形图测绘,实践证明该技术方法可靠性强,具有应用推广价值。
2 无人机倾斜摄影技术
无人机技术[9]具有机动性强、准入门槛低和便捷性高等特点,无人机技术与倾斜摄影技术的结合,带动了倾斜摄影技术的发展,大大降低了实景三维数据的获取难度,从而提高了数据的适用范围。无人机倾斜摄影技术使用无人机携带航摄仪获取多个角度的像片,利用计算机视觉理论识别同名像点,结合POS 数据或地面控制点数据,恢复立体模型,可同步获取同一区域的实景三维模型数据、数字正射影像数据、点云数据等多种类型的成果数据[10]。基于以下两方面的特点,无人机倾斜摄影技术满足大比例尺地形图测绘的高精度要求。一方面,航飞数据采集时航高较低且像片重叠度高,重建过程中多余观测量多,重建数据的内符合精度高;另一方面,建模过程中加入了POS 数据和高精度地面控制点数据辅助,使得数据输出时具有高精度的位置信息。
3 基于无人机倾斜摄影技术的大比例尺地形图测图技术流程
基于无人机倾斜摄影技术的大比例尺地形图测图技术流程主要包括资料收集与分析、像控点布设、无人机航空摄影、实景三维建模、基于实景三维建模成果的内业数据采集以及外业补绘与调绘工作,如图1 所示。

图1 基于无人机倾斜摄影技术的大比例尺地形图测图技术流程
3. 1 资料收集与分析
收集测区相关数据资源,包括数字线划图数据、影像图数据、数字高程模型数据、测区自然人文地理情况等。基于上述信息,完成以下两项工作:①根据测区的地物分布情况,主要依据道路网的分布,大致确定无人机的起降场地范围和行车路线;②根据成果要求精度水平和相机主距、像元大小等参数,计算航飞高度。此外,需要重点关注测区范围内是否分布有高层建筑或较高信号塔等可能增加航飞难度的因素以及拟定航高是否符合安全作业要求。
3. 2 像控点布设
像控点的布设策略取决于建模精度需求、是否有POS 数据辅助、像幅大小等因素。对于无人机倾斜摄影技术,目前多采用区域网布点的像控点布设法,即测区四周布设平高点,内部布设一定数量的平高点或高程点。根据经验估计,对于一般地形区域,采用间隔10 000个像素布设一个平高点的方法进行加密。
根据拟定的像控点布设方法,并结合已有资料,在影像图上大致确定像控点的预设范围。关于像控点的位置选取,在预设范围内尽量选择平整地面明显标志点,如斑马线角点、检修井中心点等地面点点位。当预设范围内不易寻找标志明显的特征点时,可使用油漆在地面绘制人工标记或使用像控纸作为像控点。图2为典型像控点选点示意图。
图2 像控点选点示意图
3. 3 无人机航空摄影
根据外业现场的实际情况确定无人机航空摄影分区,分区时保证像控点分布均匀,一般优先选择路网作为分界线。根据内业初步拟定的无人机起降场地,结合现场实际情况,选择视野开阔、周围遮挡小、无明显信号干扰、远离人群和建筑物的地方作为无人机起降场地,着重避开高层建筑及信号塔。对于进行实景三维建模,一般采集5 个视角的影像,分别包含1 个正射角度和4 个倾斜角度。
无人机航空摄影时,按照设定的航飞高度进行数据采集,其中航向重叠度一般设定为70% ~ 80%。旁向重叠度设定为60%~70%。
3. 4 实景三维建模
实景三维建模过程包括数据准备、空三加密、建模输出三个环节。数据准备主要是整理航飞影像数据、相机文件、POS 数据以及像控点数据,使其满足软件平台的要求。将整理后的数据载入实景三维建模软件,常用的三维建模软件有Context Capture Master、Photomesh、PhotoScan、Altizure、Pix4DMapper 等。
空三加密是实景三维建模的核心环节之一,为提高成果的位置精度水平,需要将外业采集像控点数据刺点至对应的像片,要求各个视角均选刺一定数量的像片。刺点完成后,运行空三加密,软件自动进行多视角影像密集匹配、区域网平差,确定像片之间的位置对应关系。空三完成后,可在软件平台查看空三点的密度图,如图3 所示。
图3 空三点的密度示意图
基于原始影像数据和空三成果,经三维TIN 构建、自动纹理映射等流程,生产制作实景三维模型及其派生数据,包括正射影像、数字表面模型、点云等数据。其中实景三维模型和其对应的正射影像将作为大比例尺地形图测绘的数据源。
3. 5 内业数据采集
内业数据采用二三维联动一体化测图模式进行采集,即利用分屏方式分别加载正射影像数据和实景三维模型数据,并使其同步,可实现二维或三维状态下的地形图测量。数据采集界面如图4 所示。在三维或者二维环境下采集各种地物类型的特征点或特征线,并借助地物本身和地物之间的几何关系,绘制完成地物。对于地貌信息的采集,由于实景三维模型具有高程信息,可通过直接在模型表面拾取高程点完成。常用的二三维一体化测图软件有EPS 地理信息工作站、航天远景三维智能测图系统、Dp-Modeler 等。

图4 数据采集界面示意图
3. 6 外业补绘与调绘
内业数据采集完成后,需通过外业补绘与调绘工作检核内业数据成果,对于内业无法测量、识别的地物通过外业现场进行实地确认,主要关注以下几个方面:
(1)对内业预判的地形图要素进行核查、纠错、定性;
(2)对内业漏测和难以准确判绘的图形信息(如遮盖区域),特别是由于地物遮挡造成的实景三维模型的局部变形、模糊,导致少量地物要素难以准确采集的情况。部分线状悬空的地物,如电力线等,实景三维建模难度大,难以从模型中准确辨别其走向和连接关系的情况。
(3)对内业难以获取的属性信息(如地理名称等)进行调绘,如检修井的属性信息、路名、企事业单位等注记信息。
4 实践与分析
以商河县老城区30 km2 1∶500比例尺地形图测绘为例,论述项目实施过程以及成果的精度评定。测区地处山东省济南市商河县,属华北冲积平原,境内无高山和丘陵,地势平坦。测区位于商河县主城区,经济较发达,交通便利,建筑物分布密集,平均困难类别属于建筑与工业区Ⅲ类。
4. 1 项目实施
项目采用区域网布点策略,像控点均匀散布整个测区,各像控点间距控制在400 m以内,据统计,测区范围共计布设像控点460 个。
项目采用DJI Phantom 4 Professional 四旋翼无人机多角度影像数据采集方案,分别包含1 个正射角度与4 个倾斜角度,相对航高控制在100 m左右,航向重叠度为70%,旁向重叠度为65%,航摄时间均控制在上午9:00~ 16:00 之间。结合测区实际情况,选择以硬化路面为分界线,将测区划分为29 个航飞子测区实施航摄任务。为保证接边精度,各航飞子区之间保持一定的重叠区域,原始航飞影像数据与有效建模面积之间的数量关系基本维持在4 000 张/km2。
实景三维建模使用Context Capture 软件,将航飞数据、像控点数据载入软件平台,经空中三角测量、实景三维建模等环节,共制作完成30 km2 实景三维建模成果,输出正射影像数据和实景三维模型数据。
基于上述两类成果,在EPS 软件平台三维测图模块进行大比例尺地形图数据采集,随后经调绘与补绘,完成最终的1 ∶ 500比例尺地形图成果。由于项目航飞数据采集时间为冬季,植被遮挡情况较少,一定程度上减少了外业补绘与调绘的工作量。
4. 2 精度评定
为评价基于无人机倾斜摄影技术的大比例地形图测绘方法的精度水平,对采用本方法完成的商河县老城区1∶500比例尺地形图采用野外散点法分别进行平面和高程精度检测。
平面精度检测共检测明显地物点1273 个,剔除32 处粗差,粗差率为2. 5%,最大误差0.290 m,最小误差0.003 m,中误差为±0.081 m,小于《城市测量规范》(CJJ /T8-2011)规定的地物点相对于邻近平面控制点的点位中误差(±0.25 m),检测数据如表1 所示。

高程精度检测共检测高程点2322 个,剔除22 处粗差,粗差率为0. 9%,最大误差0.260 m,最小误差0.001 m,中误差为±0.052 m,小于《城市测量规范》(CJJ /T8-2011)规定的高程注记点相对于邻近图根点的高程中误差(±0.15 m),检测数据如表2 所示。

经检验,该项目的精度达到规范“优级品”的要求。
5 结论
经过大量的实践证明,利用无人机倾斜摄影技术进行大比例尺地形图测绘,能够满足规范精度要求,是地形图测绘技术的重大尝试和成功应用,其技术优势主要体现为以下几点:
(1)作业效率高,劳动强度小。无人机倾斜摄影测量技术响应迅速,数据获取快捷,作业效率提升。与传统的大比例尺地形图测绘方法相比,应用无人机倾斜摄影测量技术可以大幅降低外业工作量和工作强度。
(2)数据采集直观、全面。通过正射影像数据和实景三维模型数据分别从二维和三维世界在线地物的分布特征,直观、形象,作业员可直接在二三维作业环境下进行数据的采集和编辑。
(3)数据精度高,干扰性因素少。地形图测量时经常遇到现场不配合或者地形地貌过于复杂的现象,从而难以确保地形图的准确性。利用无人机倾斜摄影技术进行大比例尺地形图测绘,通过非接触模式二三维环境作业,可准确定位地物特征点位,确保数据精度和全面性。
该作业模式也存在一定的局限性,若航飞数据的获取时间为植被较为茂盛的季节时,由于植被遮挡造成的实景三维模型难以表达的地物,仍需要通过补绘和调绘的形式进行补充。
艾三维技术,用心服务上千家客户,专为客户提供bentley软件,建筑用的bim软件等正版BIM软件出售。
BIM软件免费公开课,bim技术微信交流群,bim学习资料领取请添加微信:18122393143

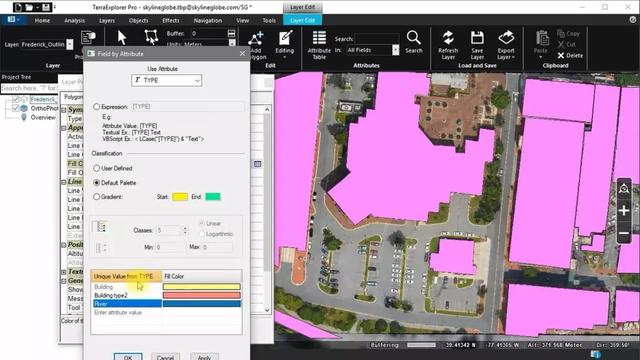
简单3步,实现三维实景数据的发布和使用。前几天有朋友问,目前做三维实景这块的公司中,功能强大,但操作比较简单易用的三维平台有哪些?当时根据我的使用经验,给他推荐了2款。今天结合一个之前在三维GIS知识星球中分享的视频,给大家介绍下其中一款----Skyline。

项目使用飞马D200型无人机平台,获取了高精度的倾斜影像数据和激光点云数据,并完成了影像空三处理、模型重建、模型单体化、点云分类等处理流程。经过检查,成果精度和效果均符合预期,可以满足实景三维地理信息系统的数据要求。并在项目实施过程中,使用了航高检查、航线优化、影像筛选等创新型方法,...






' %3e%3c/rect%3e%3cdefs%3e%3cpattern id='pattern_fill_2_201' patternContentUnits='objectBoundingBox' width='1' height='1'%3e%3cuse transform='translate(-0.009818731117824756%2c 0) scale(0.0013595166163141994%2c 0.0015105740181268882) rotate(0)' xlink:href='%23image0' /%3e%3c/pattern%3e%3cimage id='image0' width='750' height='662' xlink:href='data:image/png%3bbase64%2ciVBORw0KGgoAAAANSUhEUgAAAu4AAAKWCAYAAAAWbBxmAAAAAXNSR0IArs4c6QAAIABJREFUeF7svQmUXNd5Hvi9tfau3qqqF3SzsW/dJMAWBJAEKYmUTUqyICtHygSyRqNMpPHRmUk0kxnZOdKxI59xnMTLHPvYiR1Lji1GQ1qxFFOUQtASQZkUSRMiIS4AATSIpbvRW1V1dde%2bvO3O/Pe%2b111oAiAoURSW%2bySwqqveu%2b/e/y313e99//crkIuMgIyAjICMwA0XgfTef5PJHflSdnTvv8kANeRqNET%2bH7HEYkiLNzh%2b5EvZGy4AckAyAjICMgI3YASUG3BMckgyAjICMgLXXAT2Hvh2plbLrfQreCfAs1gOHnx3yobFwXSwWPbq95ZVw76x2HCr1bqq8WV6kuOe5/F1VfWNm9BX9Hm2UDna/m0oFMKPJ%2bxp0zAA2DBg4OGHv5cP%2bhWLpXHk0Y9IsH9VR0GuJCMgIyAj8PZFQAL3ty%2bWsiUZARmBmzwCF4PzGg587K6UZVnYsyUx7MC9bHT0/x%2b0T1xoDi%2bXm%2bjqMEBQ23Y8vO9dAykfd/Nt%2b3q7UK430HQ8qPAQSaS3wPXQtFy8ZzQRCnYgoDr91wFgjlzxsLjVSWhxEK7/wWvVltIqno5HQyiWK3ju5YV8APg3DsWm29t56XRxGjBhmiYe/eazK6B%2bZZ1YDMcf/UR278HnM0ce3idB/k1%2bbcjhywjICLw9EZDA/e2Jo2xFRkBG4CaLwOiBhzKzpwtpYqQ/97m72W3bQ8M9nfFxAsyKZmx53%2b4hAtIEmvsADK2ER/nJbrsVn2QXoFws1SZgauK97QJND1jbetNft9Xw17MYDFOBqQJKCAgDCFEbDDA0IGRc3MbqdMBviDF6c4EBIQWY8j%2bdnLiwhLnFGu8lc%2b3TgLrC8j/3Sja/bX1y%2bm%2b%2bn1V1LYTHvvn8FGBgcDCc41Kdw5%2bQwP4mu37kcGUEZAR%2bsgj8ZL8gP9m%2b5FYyAjICMgLXfAQIkOdqOXzmY3el7hjrHv7at%2bfU8bHYurtGu1Onstj8vtFEWDOMkXg41KcyDHUnSU6yupQsBbYjgPRyHag0GCwHaLY8DqrrRILTogB1i4Ng/jlTAbbowG65hKEB1kLTVVBvCjkLtaHSigrQaKrQFaDqNDhTXnFc/l3D0S6SxNB3NE%2boWR5UVUHFpc0VMDB0aAwuU%2bExIEZDYIKjD%2bsMMU1BNMRgDKT55z0uAzqBKD0aAL0qCBPID6kI6eATgXBEfJfwJTmGLvo8lHzjIac%2bLVQBxbUu0Lf1ZmtheqE88YPnFxaMkHuWPtt2S2L6xxO16Ue/%2bXL%2b%2bOHPSmB/zV85soMyAjIC70QEJHB/J6Is9yEjICNwTUSApCyT56fTn/v8Pezk2fLIwQfSXmciNO7Bw7pUcszzCMwC24e7A3kJseUXLTmGUFcL6ckcsERgt2KhouiwlkmbDtRrTdSaDJ6noNwA6m4dmgZYlgDVdYejZw646Qbc9FQB3AkhqyqWmx66IiqKTUChjzSxHm0bAHH6u2grvF0iyzX/O1p3sQpk4kC%2bLr4jkEzb0fY%2bOc/7ScIdRki97VeA/iRC3XVFfzzXQ3cEcLleR/TYA%2bPgvJLsQaqSRy2VAaF/zwV6O1TRpi/U6TQYH0NPh8InAJE2Nj%2bsK%2bhIqxiOAZ1xIAnkFAXt4v0FP/CTpy8sYaFQPXbkxFL%2b1TPNmSe%2b9fzUv/jCA4xA/ZFHJVt/TVxcshMyAjIC70gEJHB/R8IsdyIjICPwTkQg0Jgf%2bNiuFCyLp3nu29417MKBQ2gUwD9%2bYNf4bLGJ8nIducUS7n3XyBhJWgIJigr0sVJ1SEnGMbPIuHTEVlU0XaBUAxyXoVLz4BSbsC0NtboNx7NQbKmo2XUs1oi1Buqeztl1YsIJPNPNNgDaBVtFb0gA6YLlQfeBN5TVDNIAqFOf6eOlKpBOALkK0BtfBeOFGr0Xt3KNULJ/V%2bdg30fq9H1ws1cUBsbEVIH3SwHma7qYHCgcg68szNflU68Crb3L0b3HgbjtAZmIAzgeXMbA2mRArqugMyImQmoqRegfiZjGWX36T3dMQVwFOuIKTAXo7NSwrlvhEwfqQ48BdCWAQpXlBuKY%2bu/HwMb6mqdjpn3ajEZh6irOz7Gjx44fwwuni9MmTIDr7V/Oy%2bTZd%2bJqk/uQEZAR%2bHlEQAL3n0fU5T5lBGQE3pYICKB%2bHg8cuCu1Z3tomMD5Lz%2bwa3xqtoxtAwkC5LRw9nyZ4ZYuRTgg1pqAQyjVYag6CloVFw1Ng%2bUB1TpDq%2bUh2wLcCzUsNxwsNRpwXAWWx9DwVGgaQ5m4YY2YbELdCkhtYmgqyh69KtDAOEedDnHVu98V9gZ3l4AxXxKEPQe6mRCQb4HLYS7lBsNXJIzuTwjoNcDbfKLg741AfSoOFOpv1L5Tu1x54zPya8Xxmt9ItqbDh9u81YG4g7kGAX1i2YXsRqBxQNGAbBV8IsK7yNl7jvQ5cKc%2bEmc/Xwtzhr47avGpQaepIK57iOoe0NWN9WkDHToBdwWDaQ09Jm0FdISAWAjI%2bKY7oj32AoDJ6bzTCumt0%2bnuOP768ZePUvKsacZ54mwsRhvEEI%2blcfjh90vZzdty9clGZARkBH4eEZDA/ecRdblPGQEZgZ8oAqP3PZTJIYe/%2bK0Pj78ykRtOpXvv/OyHNlJ%2b5T4oyhCXkBCgdhgspnC2vNIEWh64bGVxyUVr2cJSSUGl0YDlKCg0arAdDYZKmnGXA%2bWmo3CWu2wTCNegawKMEpil9QiRa7Sij5ZJTsIXDTAUsS%2bSr9DX/N9FLPbq0HlTCrHuqyA8ZQoZCwF5f1f8zSXcHC%2bKYfA99TtPgD0mgDnp7Am805MA/krMfRzc1536GCxr2%2bc/Dr68hmvrfVVNtiH4ffo3SCC%2bqvG4BB2kiUgw2chWgIEOX8/uj1UnCK6ICQp/BuLxwwVSEM1UQnBth0t1bAZ0RSzO9HeEVHQaLjr7uxGNqNiQVGDGVfTqDJl1OtsQghI8MWnX1HseOw8V%2bR9MsomnH38hGwqxsy%2bfqs1s2ZqafPThH0nt/E90FcqNZARkBH6eEZDA/ecZfblvGQEZgctG4MtfPTFq2TWcPtcc%2bZf/0/rdqWRkTNGMkQ19cdrmIqeW4%2bcclKseqtU6sssCZC%2bWgZbD4HgK6nadg/hFSvT0QSaBcUNRUfNU7rASgFjalhQnXDeuqXx9AWoVDsyLNZJ5CCTOgWfg8kiAvQ50x4FS4wpMeduIqd1FSzDswS7yTSAVEmC%2bLwTk/O9zvvqbGHx6H7Da7QGk9gi0k6SGa81V0d92I5sgwbUdtK89CNTOQkNHf0xk0i7UxPt8jUC6h3UJF3M1ocN5A/hXBOvelxBxy9aAfl/as%2bg721DXBvzJAyXNBjMg4tUp9jysngDvNA5K9LUIzLsuXIfBI1kOVHQYQFTzYEV60JkEYhEVvVEFqS4VMUrATWq4YyuQWpEKMZ4MS0Y6AKa%2b98oym1koTVyYWs6Go%2bzsyycbM9u390x%2b%2bVM7jstLU0ZARkBG4FqMgATu1%2bJRkX2SEbiJItCuS799a2zYbTnYvnNsfHQdC6QuRMqOkPacwnJq2h1yHMYZ33LdQ8tiWCoCS5U6ik0NhtdADQyOq6LmepwB11QFpg7UyHXF14cEDDPpwHkSZ4CdV6hnQo2rB4J/72vCiVEuVoEEMe0kWVEFWO%2bKAUVKCr2SxGUNcM9bQk5DS6EF9PjvqZ%2bLLdEWn2v4/Qq05pcD7tQXArtBOinp6rlkxpeXkGyGJDiXo/B5CqoK6GC4UNUxEBcuN7QJbTfPwTuDqjCR7LqGqg8SaNu19jRxoD7QZ%2bmoCGuenkpQm23bBzH2Q82bmK2GMRhvciCvKB7mqxFoqseZeGLpu0JNOK7HE2i7TIZqqJvHMNEBRE0diYiCroSKaELlmnpyxhkaBDQDWFaRHc6j3pfGIsltgkNzYk459tqJk0e7ukL4l//qyaNSM38T3ZDkUGUErvEISOB%2bjR8g2T0ZgRstAnsPfjtTy%2bVACaS3bRS69F96YNf4%2bakychVly/t3xrf6oHPPhRIlMHpo2sB8S4VdaKFaAxYLNeSaCgq1OhxXQ9VzEdJU6AaBQQWGqqLqqFzWovrIUtU8rjt3mYaE6axgcroJVizaSogtgpviWm15AGiLBDh9qUdnRIDkMjnAKEBPDFj2AenlgHEgM2k/rrQtsejEsNNCYJ7ek869L3wxw%2b54QNoEcg6B64sXzrhXhSQmWAiEE2juJemMAizVxVOHS4HuAIfP1nSMJGzQ60DM5ZFZqGlYF3fFJAIMC3UNlOgaLGuZ94U6SWmEJIcektArX5iQ6izWhW/8lRaO6f0DQnIjrulXPZhgyNbDyMQaWKjF%2bEFYKJMVjsdBfE9M4xM6ilV3pMUBfjjZiS5Dwbp%2bHcmIAi2mIq0yZHo19CcVbOqmclJAFUAc7IVvHAW7cxM7/Qd/8eyze3cmpkOahh%2bfbU0fPvRyPp5ej8NflVr5G%2b3eJMcjI3A9REAC9%2bvhKMk%2bygjcABEYve8rmQMHdqTCcXX/b/zP%2b1Inct6W7SllK4A9hM5a5HXOi30yzNYUFGZbKFY8ZAtVVJs6lpp1OLaGquKi6emcQe8JM84CK4rKEyMDInnVTUUEjgBfpaVwLE3%2b5Mxdyadcwde0PQHSUlNHd9hGsaW9QQZCFo0BQ8ytzX1tO2fgfWAaOLXQfi8lR%2bEylDaQHvSPg24fsJN8ZgV4%2b28CS0f6kwQsa0F7ALo54952vnBte6B3pz7SowsfSF9qkhIw5jQOksOsiwktUJakMT7gZ4p44rEu7mCmqmOYXomJ99nzYJJDrwFgT/uMP00aAn19EEsC1iRderMlaHexFuKSHepQKtbkfVlqhvhTCW5YSaY39HSgKPpObD0lw1quy2U3whRHQSKsIpOKYLhbQbQ/jFujHtZv0NmIAWWwzX/eYyx3ZAaTz7xSmChMnXnO85rPPP7oGamRf7MDJr%2bXEZAReNsjIIH72x5S2aCMgIwAJZHuvGNkz9gWc93%2b0d5UX098bOtwzwhjbA9FJ3B1KRVdZAsuSst1FCsKluouipUGd2Zp2RoMzYNpaGh4jLOz9I/AXtXW0R0VLiUcmDkkMdFRaDmXdGEhQFdtEatOriTuirVhcKQIEFZsDZ1hoemuNMk55uLjGIBGYtR7IqvAnyQy1C5n333pByWEEvtOspTLgfeg9RV2PWDZLQHKCXL2moJ1JxBNOvicfWnAvjIORTDufR0iCZVsI1f24/u7E9Pdrm65XKIqTQCCEHAA77Pt2ZrCNe6zVf2yjDufRJDW3U9Oba/2SqB9MCEYdxonJaaS7zx3o7lK8E5SGQo6nwTVIpx5X2yEuKQmVw/xfonj1fYTp4j9ZcvOylMV2wYaNkPd8lCzgKShINUXw8Y0FZTSsaVfQ1%2bXii09CrZ3r8aSgeUYMPmfD01O5LK17P/zb//uewPbB149Lj3l5c1PRkBG4GccAQncf8YBls3LCNzIESCAfuBjm1PRsLd//22p1GAqOeZ6DJ3JxL50hzHUPnZKIK3UPeSLlETahGOT04mCQqvGJS2WI1j0CoF0BeiNaBw8ly0XmqKiO%2bwD87aCQ%2b3MMrGql0u4FCCOodjUkTSF9KN9CYC96nuTtGvKL1ov%2bEMBSDLTFRUOMoQEO8nbhlxtggTYyzDua9vjWnZf504gfUUj7gN3Wp9/7uvm10jKLx6H7xVfoKqkvh4/cGvsjl4slSHpTI7W89Uo7c4wtA%2bSyQwlHMzVdKyL0asA7znOvHsXFXa61Dm%2btp8knVlJUm2b0JBne18UyBGQv0rgvkAgPdbAfC2C/niDj4FYeKhCdx9o8mnyQYaVwaQrV/awLqkjV3X5viimtC652JBGvmUzNAjMW0DT9dAV0hHRmhjMdKGvT0dfSkN/p4p964GNkVVvfIBdePKVuqOh%2bOzZrMuKy%2bXnfu93nns2e%2bxXj93I178cm4yAjMA7HwEJ3N/5mMs9yghclxG47%2bATmWztPA58YFfq9o2x4c7O8Phd47dsCSkKV2a3J5Cem8eQ53lwXYZyzYNlidelYh3ZigoNLdQY%2bYCrvJBO2SVw7uvEw5QWuboUyVydZCkhH2URgFVUlFvuZYH6WnBcsnQkw4JppbaDBE9aLwB1NUu5qvaCbVYSVX2wHuyT68evgK7bvyJwTaA8ExaJqJSkGsh9yE0msJGk72k9Wi6VlLqyb5KM1IWjCzUU%2bLfTpKY7JsZK33Pfdypy5NtDEuPdbg8Z9JHWC/zcaVxk/TgYd7lshlxm5ut%2boupVjDeoLcXtL2vAQAKYp6cAUWLNRfLtlcbWPkZVXXXGz9Ui6Is3kK%2bF0JdoIlsLIRNrYaEWRl%2bsiVzV5BNA3kXfu95QFORrInGZJFIri5%2bPTECezhHL89BwgIShIKHWYCS6EE%2bHMdCtYluUIdahoSsCbBxWGM3fNoLlj0%2biNjaCFxljrademjp95Fg%2bf/JsfWbrlszko4dezx95%2bCPSR/66vAPKTssIXBsRkMD92jgOshcyAtdsBEYPfDuTq53Hpw7clvrYA9uGw1p0/NYNiTEfqO9pOQrI5aVoKdwv3bKBpbkWpheqKNZV1Ft1FKm4pqOh7lElUoWzne1%2b3z1UajQA1T54EkwwVfcUtylGQN8H2uShfjngHjDIgYd6ANioDdKv05I0nRXWnb6v2uQ2470l4F5oAr1R4SZD7DUBYvq74Hu4X%2bqAch07AfSwAM6Bowx9HthCUuGngHUneQz9TWOhz7gV5GXkMsEEhPZLwLjd2aYnKiQ0vNhS4HjjCTlOMJlZO9kIsPh8XWjYZ2sahuIuB%2b/kNDNf1THYYSNbU69qokKMO1lAkl1l0AfaNzHu5DRD0pmgkNTlAHzQJ5LDUMf7Yw0I4F5Hvhb20bng2wVoD0MkJfsB9E%2bgQpVhXVJFtupx%2bQzfwgf1Kzoa/wBS/u1MUYftEiPvodtsIRbSwBJxbIkDxjoTu7oVbOxVoUUV1qVD2enLar7bZNntNUw99qPsxNmjx54zI7FnTBM4/OiJfDxNxaAkiL9mb3yyYzIC12gEJHC/Rg%2bM7JaMwM87Aun7vpL589%2b8dzweUcbfu2f9mMrYPgBDBKSpyNHsMlDKtVAt1bBQIntEBaV6A03G0HAVhHQVui5sGMnlRVToVNAR81Bv6StadMYNxwUoJyTpMgXJiIPpCtAbFnRooeWiJyTe002LWHjdB/TtgJO%2bK7V0dIYcFP1XDtgtnevXOZPvWyUGWE7RGE9%2b7YrYKDW1y1cqbTsgQXVS6gLXuAegz1/nipIdSs70vdqD8RDbvORr2ekzco3J%2bgWY%2bN%2b%2bdzu9v5INZL4iPNwpDgTcaRJByyWB%2b1WcYMFkgCwghzlYF6BdJK1emXHnIDuYFaxh7ukrDuApkZakMnHBvtNCchryfm8f50VtcZDt8YkMHU8aZ7Ya5qx7jlj2BAF2Yc%2bjakI6Q8dnoeSiLynOIVVRUKh44lgrwEBSQ7bk8vWCbgfh4ect/5zOOWCupHM23rY9vL5so0vTEY84iBkK%2btIRxDJh3NoJjG3QkUwobH96dSpAebF/7LKTm46xo0effyF75oL91JkfnXrhyOHPShb%2bKs5HuYqMgIzAqvOZjIWMgIzATR6B9H0PZe5698Y9X/iVwd3difDYlqHuEXJ8IaA%2bW/CQKzhotBhm5htYqrgoVpvwmIaq6sKydBBpToC1M87Q8B1ZEjEX1YYuGFmPIRoWIphqU3AG8bCLelNbkSuQRIE%2bIyAt5A2%2bWpmvLpxMllse0mEDyy1nJSF1LXgP8GIguSHgRWw7yWXaBe4lS/Ndaa5sBRmcGgGA5PaKfqGlgG3ndpDEuF8mIfWiNtrOtSVbWD9SwSVqn1jwHj8pNWDNqXeXcpFpb5MY9UyH0K2T9IX6SECU67iZeCpA4eTJqVfhM78il2mrnkoAnlxm5usKb%2bNSuQBBjOi7uQrQT7Idcpfxk1EpToHDTH5NouxKkmqgF/IHSPuar4YwkGiCeaKqLUliiHHP%2b4w7gfY0seyNMFTGoGlC2y7kMQpyJQfppM7PqVyVYYAYd8qCphixy3vbt8dhsaqD5o/ZloXBiM6LQvXGHVwo6Gi5HijZtd5gqNoeNqbIajKGzoyJoZSK7X0qhrsUtj%2bzCuTp4dJDNXby9LemJyJonP2jP3j6QamLv8lvxHL4MgJvEgHJuMtTREbgJo3A6IGHMr/3xb3jEVMbJ9cX3TCpKikvckRLw8HQxHkbhUIN88SuE9h2atydpaUyhEwFFgFfVUE8uqo5DljaKrHX8BALu6g1BdPJyKOPVyzyAXpD9y0GqVSp2C9ZNfIbk69LLjRd9ER0FJsOujlgF3r4Fcb1CvrqdmBLYI8KNBHzHoB4bhPZxrbT%2bsmwexHz3t48FVfq8p1aOLvvJ6YSYCcnGa5791UZBMDfTOtO6xJwp/EEcg5RVEj8vUQOM1c5vmCsNE5ePTXms%2b4%2bUA%2b0/WQNyScXV0gEbZfJDMQdrmlvT0y9ko6ftiX2nDTsfOLkz70oFqQpX/CZdeoH9ZPWI427OPgihmvHLM4phvlqGP1xEvsTKGeCYSd9O4F1/6lNX6zFGXcaH%2b1zvuSg32faaRd5Au0JFQsVD31JegZEjD15w1%2b6KFV7%2bCm2pgacXPQwEDO5tWQqYSFXNgHS3ftZz8TIn684SKoqOkwbzSbQlU4g2mtge8LFhn4DkYSKX9ihsD4%2bYnaBAZTFUfsvhy88860nG8ePfO%2bpQ6Nb%2bnJSTnOT3qDlsGUELhMBCdzlqSEjcBNFgMD6gQ9sTt02EhpO3bIFOhrj%2b7clxzwPI6qKvlLVHaoyHbVlB7WGh7mFGi4sq2jZVZQdDaZBNo06ukjuUtc58xkP%2b3rxtkKjBOwIrNMNJh51UG8K%2bBOLuKgRWOcgXgSeZAaNpg7hve5LZtqOyQrjSU4uTc8H8e5VscbUDPWh3KKiOw6v9ln2mXcC7x1hhwN3qsjZ/gCSO5Hw4k2CoeZste8HT%2bC90wfqBNjJRWYtcKehkWXk5fTu7WNatnztuV8dlUBfN0eRlwbua2/agf79otPYl%2b7QcaAJBWfYAzafgDtp4NsQ6RvmBv5OfDWSD7hF1dnBhC2qp15mQtH%2bcZCTwAGzX5iKu92Q/Idcbfy%2bcVtIksnEqDLrpYE7x9UqWYAqPPF0gLPtYWTiwgoymMgFmc0DHS0cmzfQ3yl8Zuh/tN/FKkM6QQnS4OCd%2bjPQoSFLTjNrxrRWokN9oHEXauIpEoH2hZLJJxUDSQu5ksGfHlHRr4WGxfdHT5GoEFSryTAStZHMdCGaMrAt4mDb1hD6SU6TAS9lNQew/1BgJ3ccnT46cXIuu3tn5AcT0%2br0k4cn8xLA30Q3ajlUGYErREACd3l6yAjcwBG47zPPZw5/dV/2i3/6yuhtG5XhrZvWj2ux6JadfuEjksEs1xiKtoLCnIXpuRpyJQ9LZLROMhiFIWoAYVOBpokapIGF3koSaBtgbw8lt9AmAN8g3bhg5AV0EsxqLEKTAwHiNZ0YfXJ9UdEZDmqYrrbWLr8otjxuDVlsCvAegKkrHcYAj5VtckERfUmEvBXmvdxUfaZdRxcx8q1VrXuwb7J/JEtFAsIE3DmQbLd/ZMIekldOvRQAbOsgd1axFO7NToCSs8wkAxI28qDiTgHYDjZbuVn7wDf4vN2B56IY0ESnJuQzBNRX2G/%2bMGP1CQmXkgRA3Qems2VKPBU%2b%2bTQUqpo6yAsxMWQbBNrFXgPbxSAW7UD9or60ecIHunSSyfAnDW2xIoB7eQ0/41p2AuoUMGLYSSaTocRUn3HvjzUxXwv7/RMFt9LxFl6bN5BOihOSrCD7EipyFYb%2bhCpkNxUP5lp5Dg2AJDplA/0d9kpVK1pfVzzkKyYv8pTpIMbd8Mch4tKfdLBYNcXTJHIOatg80brUULCUA5QwVfB1sC6iYOuubuwcVDEYAbYMa%2byePnGRUE7yv62yk0sPzk9MnDr7/F07I48dOvRyPpNej0dl1dYb%2bK4thyYjcOUISOAuzxAZgRs0AgTWo2Z9/4FfuD01us74MK9QqiioNRhKtoK5GQszczVMLQL1Zh2up6GmujAMDTwnVAMyho4yhCtHwGgSfOtSdSx7zkqBnsuFMJA4EEBPRG2udyeGnV6jEQ/Vuo6OqMUZdwLvSw0HXWGClReDdgKWyz7bHoBFLiVpuej1Cy%2btBcuBzj1oiU86NIZKS0xAPCYU9KusO0MiJGQ0xMxTe8G%2b2sE7gXP6mwA6MfEcqPtsNlkDVnzP9faYrL3RFlq%2bg41fwZOgGrVZqDOkI4J9DmQ4XFJSFdaNge/6xQCdUP7a2ZNw4yEQPF9V0U/Fk6hmEVckqci3VGQiHrJNemXINUQPg%2bOl0QHgARV6cvHOT3r1dfMUHGqXLCGDCVS7NIa36E8y6PhR3ykJlVxk%2bMTlKn3bg35R54lpJ9926g95uA9yEE/AmBh3EQOeG0EDZZTOoIC824l1XyjZ6EuKiSKBaEpuzvkJqpR0GlSlWplHBG8CeyK/I9mSgf6kzYs8UTvZiol%2bYturBtfWB5Og4IkNFYEyaKJBSbRcG29ivmlhMaeh1vLADMZp%2baph4I6dHbhrk4LxARW3blLYsG8VT6P5GmMnz/6XcxMv/jj//Ms/ePFQ9tg/lx7xN%2bi9Ww5LRuBKEZDAXZ4fMgI3SATaiyF99H0b790%2b3L3iAjOVdVEsuZjL1pAtAk2yb6w0UPQUhA2VVyQl9JkyKHkvADGCsSy6rgDtbUiYnDSWXWfF43sFHPt3FAJnQTMkmYnHBLseFDgirXsA4PkrT0YVyYQBaOdgkQN219e2OwG2EuBLaS%2bA80bpB3eViawmo3K3mYiDSkuIuxPkMuOKNqhqKu8bU7gGvuiv0xl2UbEI6opET1oIDBOoDgr98L60/UEWjwI3ehyk8j94RVOS%2bYgBUlslqq7KizaJhnnoONgEugyg5LPvQWypLS7V9mMrgLEH3enkwD0ouERc2EheAAAgAElEQVTbm7oBy7G5e4plM8RjBhSPodwhYhwJq2g0/Uj7iDxW9FDrUlEuE7hWwGoFzmsXmuQIJJ6V0L8yT6IVMw16WiCOmXB5yURVkO1jiiYZ/MmDOIeogFZ7vKjrNC%2bgWF72iYE/8DUPL1YTU0nbXg0YdyGV6Sd9eyOEuZLLnWKobfJ0p%2bJMJGcRC7HuDgYTugDufjXelXPYP9bZssHZdEqGDZYVL3owzFcM9HXQ5FWw75mkhWzJRF%2bXhXxZF5MkDVho2hiMhlBoWegPm8hZ/nXjM/fVhobKMqBHPJRqLqphHVt74xgeAHYMatiaUbGuU1lh4uksfex1J/fi0dxzf/VnP36kWS7O517%2bH79/g9zG5DBkBGQE3iQCErjLU0RG4DqPwBe/%2bsro%2b29PfPS9u0aIVRfJpQxDJ8/VkFt2YFkA2QSSJKZWr8MwVDCmwjRV1OFyCUynSkykkEaQX/qS66JXM3xWXUGvpqPgOujxXwVwXiEpV4BnheveGRIR4uV9mKQwDtpJ615rCFvItQsHZ23JkvQ3Z9PDJpaaNpfGlMhFJmxgyXeToVdaqLolOcxw0rQN5REwFJVShQa/HQBeVHTH33XFFiBzpd/%2b5IDrxBsMPeTV7mvDyQGGdpgyAYdwuQdkbQ8Zg6Locl1zR5iqcTIYLI0oqoAa4fFNkoe7YQhf%2bk52UTEo2rceVeHU19Z2Fb1KxhTUaAYVTIzaOmw3PDRNFaGWByOqwqY2gskWA%2bou0FJ0JDq5Cgr2iQIURYOnCgmQ4rrIdvXAqtqIh5U3HKcgJ6HaFDtvUWEsP%2bYV3zd%2bscXQG/GlTnmba70rRhUaIzcgMQaarCy2aMJELDSD3nbQAmC8otvnRblWZVYrIJpLbzwOyPvj5CQTeoM8KR1tYb4S4ucETTzoNVvyhPVj1eNyGfpsseJdVLE1eOqQrRjIJOxV4O7LZtZ1tgTLnrD4YViskCSGZmqKAO9Vg5/KBPrzFYMz7VR3oNC0eOEwOi8pcn1hA7mmzfdtOSrChoNaTeMVW%2bstBsd1EPIM3DIcwbpBDTsHdQz0qfjIBoXytxEHy5Og7e%2bPLk8VytWJb36vdvzHTxw%2btHXLsExovc7v6bL7MgJXioAE7vL8kBG4DiOw98BDmfs%2bsDm1c0Qf3v2uW8e39ShjAPZll9kQtz6seZi%2bUMVcgRjXKk%2bmq6uMM%2buE%2b4hZJ5TqiyF4BJYcG51tViMEukqeYNvbl7WAvf27QDJRaXD3bCQIrNc1DgIJuFcbBhIRC%2bQ4w9cInGTaGgn2x/X3TSGd4el%2b5JnecgOVPN8imGgQoCfwflHCpQqeiEpSmIDlDiQplZYOXW1jnP3W2hl/%2bqjYWAXQVH1ULL6%2b21enJCiRlHfEQyeiqCGMsAokiF3XDaFhT17MK9ONt6tfhwFgJIY8vVH9hFSaQoUNvik/XvTxY5OwP7geBsfMLlA0kCeZ/akGMH%2buBWWGqisBBcQ7e1i1eFGQ/F6fL2ulYASpdZ1ioqQI%2b0kC5dzbfHJ5JUd3Y8JLFhDrpF32pkMY2Qx4TaHKIfbfcYDJpzHQuxNzx%2bbYQKkokjHXKEv4LstW2/jJR58cZpo1lFsMmsL4JEbIcmhSKYA6HUs6HQv1ED/29Gkq2uTcPklUaLtF/h3JmgQwny8y7Ox3sMABu/BwD46XmBQIbTydkPmKh/6kyl8JPAfLCnAvmxcz7n7xKppIFCom0jwZ1URfZwsLFRN9BNTJXSaQFfGnDcHkRsVS04Lhn6A0oeMTFxqjCliuGBMtEcPFYl4DnW8Ny4MSddBveNi6uxeb0yrShoeuWwz3lzNQ6YDSQ5t/V2Anbzu6cPTM6xPPrdvUOT0560w/%2bXwpf1hq4a/Du7vssozAlSMggbs8Q2QErrMIfPFPXxgNm87%2bT33i3XcNh5T3AMpQyQImpyxkc1XMLioo1uqYtxSEiIElUOiD9bApWPWmJeQPHJy6Lro1A0uugy5txTkdy56HNLHurmC2A7adku3ebAkAvNA4M9TIuQUe4hHh605LIuphpkjVRi9ukJj27qDYEv9K5Ww7Z9R9up6AY2dYQ7HlojOkodR0LwG%2bRC%2b5Y4xv%2b0hgT7RIji%2broJzjYV6YyddGk7ULJZtGhEMIrRnVXBh2HOEQQNUvqW4UbRcLC7BmxAxwVYXvQEPzjW23a9jgg6sCgBmSMzNgXEX%2bdx9r2a1waIoAu3P%2b/IIaaMoBnM5qyysTJh04f9qppuOLsyvVo1Rii3WcfGFmARod4LYHFrw7GhZnJ%2bZFBIRnC5Uk4gDVBbQoW2g/hoOD4dzsbDNNn7l1pY%2bOeAsOMoM7%2b13awLKxZddAHzwHuWrP4MimUJzGv77H6trzqfV9TlPBj76zDLcZTnWnFJ66S4eq2MTA3gMhnDsDDHYDSWL2FeAffmBz0FqwFdSKQRVbFdViVRwDsldXGX9iwvXqfvGudNziFpCDiSZPSKUk0WACOl920d9pcDvR3lgLxxd09CcVv/CSjlxZFGBaqPgymaonCmet8XBfmTgGCbiBVIYXcTJAjHvAsnMve//0DSRm9Gd/wsbLeWAwaoqJG51vTZtLhuis6Sede8MWkxMVWC6ofBLb0%2bOhYamI6B6fYDdtFeUC1T1w4ekMdkxDswHcsSOB/ZsVbM6oGOhU2N1%2bQuuTgPtinU3kHs5NfPM/f/%2bR/mjz72Rxpze7W8nvZQSurwhcxU/w9TUg2VsZgRsxAsIVxhgeu337wW3d7D1UwbRQZijVGC4sOJhZqOM8eespGhoag6kp6AuTzaGIRjjkodkiUL4qkF52PS6BIZRE73t0HQWHwLtIPKXvuL7db0NwohdLTi4Xa1qPEk8TcZvLZDr8xNRgfaFvN5CMurhQJutEhbvEkE97APqWuG%2b77rPuwkUmFdZRaDkcrAewm7BoxXbXVDz1sESsvy%2bzWCammEZPaNOvnNpFkhXeCAElF0klDs9j3PLSNEKi4msHMeZAWFegxFeZdvp7cIuKxjJwfhno3whsNoFzHvDSa5g7m8NUdz%2bAF88tnM6Zy6WZcxOGShS6jkzMOnHoWy9M0Y62DoZziMVw%2bOFPXLeVM%2b87%2bFAGNWHEPlsU4N8iFxtF6QOauP8je0MvvjjdPbxlqA/eEKzGHMroHLxlQzTe1G8ZnE4h8/Fd2FXPe1AslwPpGjkY1RxUFA1KzUXJYqgulbHcNDnQLTWo6qmYhKbj4jynpxM0GSDdelBoKfiBC/h%2b%2bo6cZGjJVcUZRB7v2fIbJ35rHWVW9O0%2b497f1QLp4Ik5z3TYeDUngDolng6Qlr1JWnbRRwLqPEG3afP3cw1LaP9VZaWyK%2b2vuCRE/509Hn8KwvMKeHc9VGoaXNejORTKVReViI6dmTgiSRVj64B9Ixq2JBTcPiiusjzAHjnRPPn4Y8Xn3UJp4sdP/MOhmaP/VCa03og/EHJMN1UEJHC/qQ63HOz1FAHSrke15v4vffrd9zLGeKIp9f/UtIu5hSqWygrmisTQ1eF5OsJhAi8qDPXipM0VsO6zoMFFHzE8zFNhGI3YcHDGncA7vaY0evW90i8TtEAWcbmYCjZS6NsF6y0SUskeMlgIkwj/dmLTVS53oUV8JHpK/e8hAN8SuvlADiNgl4eKpa94HXrM5ZIKAj1Ro4UeJOHSH4whQjaTbhgdYRd6RxgeYwhxOxESDAumnUCWGdc4oE9sBWIMOHEeKP6ojuVbonOnpjGVSNCsKbfwu3%2bfWv71vUeWfnTCypP2oztSOQE9ilv6MGmacRw69Gw%2bTvQ7Z%2bBjiMViePSrH7luAfpPc%2b0c/PzzmYf/aF/2voNfyVzUTq2Guz%2bwJ2VZFv7moef6t%2b%2b/e7ddsxDd/L6t54vK4Gc/jo65l5C69YPY9NqLNvS4Bq/iYtFRoNUFoCewXlsuodISOvflOp1DQnYj/PnFuUTFlqiyQDtgn6%2b46E%2b8Ebjz83H1FOQtcFvIJOn2gaUqlQlmXOoknikBaV8qQw4zr%2bSB3SkFx/PAQMxAtmlBYSJvIOgRuctkW/ZqRVzflrNlqwgR496WpU2ViKNh4QxEi%2b14sD0Py2WVO9OQHj6Z6sbuLQq2D%2bjoS2v43A7eLX6CtwD3a680J7KnliYe/PNXHuntK/7dket4svjTnItyWxmB6z0CErhf70dQ9v%2bGisCXHzwxOtqH4W07to/vGGCkWx/hCadNe%2bhMQcNy2cX8oovF5QYaTgMNS0eIMIQuNODk8RExHf64nZaI6aJuiUJI9AnJX4hJJ/lL4AzTTSDdc9CtCuayyKUxIlHzUnr2gIEv18ji0bmsKwhtXyEtu0KyGHuleuoKKKI3PmindcifnRYC6SSB6faTTtuTT/kDAgLrTY0ndUZDDpd%2b2PDQQRMWJw6SA5GUxtRM6DqD2RFaKfYEv%2bpp72YNymmASHA3iXw8CjRnnHwookONArdmMP%2bNH5ydW6gm4t23pBG%2b8OLZdN9GvHbu9FlK7n3tTH1G13SYoQQOfffIlGnGMJhSBXt%2bk4Lzn%2bZCvO8z3%2bas/Wy%2bkr7/A%2b%2b6pV6vw2m1sHF9bN3H3rNl4796urP7VvV81/vG12E6ZvaVTyHFxfkWcMZqbaJ9V2wmqhj55%2b3CYlPYmAYTQ5KF1Rk07nUpElODhQD/Wnb%2bovM0WNHPCyEmPV81MdhlcXA%2b1gu8kqOEUyGbapfNLBIDHxMMPC39YZ07zQiZTBuS95NoCbi7roJISDwaath0Tfu6LD44f4wA6pZ4ilZe9mDGHeiWho23hBHqNLG1X8GmtI6NOxTXpgkpgGHGFrPHcPzFC2fnlheXnlO1xDNf%2bNSO4z/NsZPbygjICLyzEZDA/Z2Nt9ybjMAlI0BWjg8cuCX1i/dsHzai8YN3b9a3qsCekqVwn/Cpcy2Ui3VcKNQhCEUdIZITaCLBjSB72KDH6%2bKSbtqUECqAMH1GAJ5AfjzkINsECKwHdBzJYki/vui7xpRckQDKNe1rvNrpc%2bEcQ8mXjrA7vMzSrnMnll0LkkH99QMnGXottRiviBosRZ95F38HriIkbWEoWSpc5iKuedCtOC8QRfIWYiRVNcyBOg0uZIhY3HqHyvXdVWJFuQUf8o/%2b0EI5Ztr/7HYUf/cplJzFImamaycJcdVyixMTP55foEcYy7Mn5sOMLXzuC/exx7/9cv56lrRcr5ceSXFmZytpt2X3xfs29G/ekekL96W3EiM9MpLYblVMrqs3UqGBTTuAFuXpusAP/77FwTydX81agz%2bZoWyFYp0SrkWlXHJ7IRpbVVXBfK/JxA5O75WPSYpTFlVTB5IOTiwKS8tMWFxPvXELxxaBW3uBVxdV7E4Br%2bY9rIuayLXIioiAu4msZcNUgaWchu60r90iF6SCytOB6SFRAN5rLQ0xY9Wl6aLjSE%2b1fKY%2bn1Nhe1SZGDBCLSS7e3DbZhV3bFDRnVBhdinuRzPQqgD7tRyU0R52Iv8ff/yYYra%2b9sOnp%2bS5fb1eILLfN10EJHC/6Q65HPC1FIGgounGkVvGb9%2bU%2bDCg7CGWm3zXcwUXJ87XsFCoouFoMEyN665DhviljvuJpjSehi1oRdJq80VlIOaOFgL0XDoA%2boyS/QJWHSvSGA7wIQB9ySW/dF9us8bykTft3zXaQfulZDOiuJJgGQlc1JtCKhCLuGjwQkweZwy5/zivQCrWpX4Qm05JnDQzII/wiqWgQ3fQqXbADDEkQya0jtCK1EUhTQuA0e0ayNkyoQPHc8CZUw7KDXeuXGtMTU7XTrZyixPHX55fKGZPz5uatkAs5PotPTkJyK%2blq%2bKt9WXs/V8faxaLfcnBDf0bRvv7PKeJSKp/6533Dm8vLbRuIWeaBtSBRt1DjXJAXIDVHJQtBbmFukjSJvBOVo28loCg1fkV5SP2dgadkmXpWlIUFUs1A4MdNl5e9DggX7vQvCBft9Af9auoAshSUqpGbk%2bC5udsuu9XSkmq8S6GsOauFAi7qBrZ5ULjF8VqOCoaZcCxXTQtoFxzwfp09BkRjG1W8cBWHZvWaWy/n8x6BHD/2xMse/zRZ/5o/87IY08eej1/%2bNHrN9/irZ05cm0ZgeszAhK4X5/HTfb6Oo4Aseub371xz%2bc/ntl9z67hzwba9bklhtmZCk7OeiiV66jyKus6twYk7TqXiSiKcJwQmHZlITDRsHVEDCFzCRj3FYcMqL6GXXxC4IQAMyWjElin91wK7gPzMrHu/mdXsn/koNxn4S8lmwl0wgTcGw0N8Si5yggv62VLOMVwNxcu6FXAPA8xXUPIcNBpxKCThaUahhINcU161BQe4UMjKoZTQMsEyHWRhONPnANeehX/MFJZWHhuOrIcWzw28dyhJ16KhjsXto5ulN7W1/E185N0XTD1hbRVq4G5rb7d9/zS7tiWXVsnCsrgr96JjfF7semlJwjgMlSXbRRtFbn5Cnd%2bocRXukoIyJvk4ENyNMXjto/k356rmvzczXQ4OLkIjKU9LFZJDiNA%2bnzd4ix7tmGhj14JRXPLTXHur04K/OdePnCna63lKBx8RxJUSMuvyHW1AfDZd5HU6nFG33I9VOoMluKhbui4871JfCjjoTep41d2cHGR8jLgnmNs4sVvlUvf%2bJPn/uz80x988Gp3KdeTEZAReGcjIIH7OxtvubebNAKjBx7K/N4X946HTGW8v7tjbKuoagq75g4dn/VQLlJFUxULVQbLqiEc0uC4GhJhlwOJphMkagIhnV0M2jl6FsA9yvXtOiKmDYtYeJ8xJ8U66do7/czOElHawErhJXKVoT10ajrKXB4jEu4uVyH1DcxiG/APvhN%2b2OBFl8jaj9ovWC56TPKoFvsnVj1sOkgYUZhUJEeLIGLYUDUdjh4Coow7uiQTKqoW0IoA53PA5CLmLixjaqezuKA3zpw9esrKv/f2UPnV0%2bWZDYPxyVisC48fejafTo%2bBkiJv0tNODtuPwIHPP5Gp5c7j7nt28ERYk4VGXp20diQ3jG59fal78OBObJzWsamhOoKRr9qo2CqcWh3lBtlSGtw3nlcYhgJKQF0omch0WlgsC6cb%2bkd69kyEvELJQUYUXKJpdn/Y4PaPZGcaJFdTU6Rfp4USxf0ZNS/G1KgwRDvIK39V6/5WDiZddy2/KjBtR5Nyx/bQqANLuoIt3XFocRV3b2a4fVDHe7YoXGWXFNPn3ENPZI9//%2blTfzg2mpn8wj%2bRGvi3Enu5rozAzzoCErj/rCMs279pI7D3oAALDxzYkdq/q284nekef/eW5IdVoK9QZkOWomJyqoV8vo5shaFFyaa2jrBfeYZ%2b0inRlBaSwpBmnSqekhwmMJwQzDo4YK9bwh2GnrtTsid3daGEVKK0FaBLJR2uAOgVn65Pahpnu4uuJ9xlqMgRuckIu2%2bucyfAfyXvdtpPhRJVY86K7IWDBYWYPm2lCA25u5DdIlW/DIVc6G4ckbCLuBmBrikwDA%2buIfTpvaTJ5bIg4f1dSiJvJpX87MsM99wGPD6tTEx874WzL0%2bF86dPZBcaczPz4Z70wrHHPiTt7m7aK%2b7qB87Z%2bHwl3ZEY2r3tfWPv%2ba3/bbDrjIe%2b6gRSqAA/qGOTtQgsV1qw6k2UGx4MhWG5pmEgaeNYAVgXEf753NZRU1Bo2TAUFXR1ZkjHTpaPiqiLQAmpcw2bs/ALLVsUmKLuqgzkGHNR8imBbkcUZCKdOwf2fqLq1Y5QSOdIziO2pV40LXJLogReG42WhzmYuHN7Eu8eAW5Nq/jAFoXNOeBPF6bBci/97ez3Kvnic5VW%2bZnDh6fyR6SE5mrDL9eTEfiZRkAC959peGXjN2sE0vd9JfMfv3TX%2bMhAavz2LT3kDvNxqgQ6teCiWHZxZrKGC4t1EJFOP6tU1Md1qaqogOSBZnzFy5k/%2b/a1LEzIRQSjzTjDTuCAy2SoaIulIxZysMC9y4VunZagwBKBCfJnJzBObGCSfqn9pd1RJmDbAy/4QJkTmDnyLvmTA6hiQkC69oJlwfMUJDUFHiXIekBMjwqQbkShRE1EYcM1hJkeLZ1RFR27gBhV8vSQH9SAv3isRWYYqNmtqVefP//IqaPzC8WF0/PxkLYgdek365X1sxk3Afnzs4V0d9fI7tjI6HjfSGzr/b%2bQ6jh1tJFqmQp3ranZDDVbweJinbsa6b7WnZxhiIkv2KJybzDpJc37fEMkpK7UQPClMvSZT96LgkvtrjEc0LePU4B7aiMaMPNXEwa/jUB%2bwzdxFYRDZMmqo7TowtFdLJk67tjWgQ/vVNAZV3FwOxlXCg7ghy2WPWqiYH/l5B%2bXWPGZw4ckgL%2ba0Mt1ZAR%2blhGQwP1nGV3Z9k0XAa5fv31ozx9%2b4bbfHOqN7yG9Kmlop2ZtnDzfwMJyFQ5T4XB8TnaK5JUudK/cHcbH5u2Ba3IJjM0ZdVqivsUjsez0HSXW0aP2AFgTcCc9rmDcVRR8txjalhxk6KKnsjEE3MkhJhoV7jDB9gHLTusH%2bnbqLsloaKl49BSAPmEo1VXfgs/DYstBl64gpsURjbhImFHO5ivhMEKkRdcYEFcwtlUF5erVCegrwHQdePCvcWZ61js7EpmZrWVnJ069kl2oL8%2b%2btFUmjt5019C1MmAC89OvX7h17H137B68/a6tx0LK7Z8ex67XX3exWGEoNxXUKh4WF%2bhMVlC2CLh7HJATUd4fC4knVdymVSDhPBVl8gF1MAGu2VdwjfGDUbfpmmmzhLzaIPlVWUmqFungj8H4pDoacvl9g9yeinmPVx52Ujr69Ah23R3CPetU7OgEu8dPYqXd/b7LTlgPHvnjkxfMmf/3y%2bPfvdouyPVkBGQE3t4ISOD%2b9sZTtnaTRoDcYX5xb/KjmZ74WKoj8XGX6ZiZryG75CJXokqHNVQcFVFDgWYS26YiQSYUKlBtCYKt3Ve6PYx0kQb6dfE54yCe69ltksd4PsBWOQAPmzZavoSGklCJiSdWvkhe7X6xpZIniiuJB%2bo%2bDGekaddQ8Nl4zuhz9L7am2pTAXM92KSZ9Vx0aHHEYy7/jIA6YiFE3SbCERP1MJBZR8VgGNWqQdUFZvPI/8FhnBlrLSy8NBta7igem%2biOtE5sGDYnY7FuPP7NH%2bVj6fRNW6joJr18rulhH/jMQ5laLoe9992WmslbIyeO5bp3f%2bgT75lfVAYT92M0PukMdkbBczDms1RwjKFZrGPZFjI3usiIlV8XM1eA%2b2oJsp9%2b6JWWhgQB8UstKrhmnmbXgeNUtUX3Dv/Jnp8MWy8Dlu3B0xhqdQsd3V245zYVPSMmtoeBT%2b5ohwos99Src9/76iPZb0gA/9MfP9mCjMBbjYAE7m81YnJ9GYG2CGS2/aexv/nr%2b395/63DH6ZCSYxh6OVTVSwsupheosTMGiKmBlshv2fBrJP8JWasFPvkCZz0RP1ywD3YnZCmCGkM%2bbITSA%2bqk9q2imXP5cCb2qdF2D4KKr0/Asw3/Ncm4zaQgXNM0P5FyahtoJ3kL0LxLtxfdKOFWxJpjudDIQ%2buC7hmCGTJSImkA/0qwgpwlgjC13HiyVP5ifXu8bOxnjTGdgyd/c4TLz1jmiZiXV14/KFn80inZdEieVVdFxEgFh6o4d77dqVqtSp6tNDIs1PWjsVKanDTbdu3snGM2hUFkaI9WLUUNCoe3BJVdTVQcj3omgeDXGreydHS/aUl9kgJtrRwq1WyfCV71pAHiylolcEn5LrpoVxnKBsq0noEPf0G9m9kGB8z3G1dULeb4iGbAvbCU6/MTXz1W9PfeOrpc1MzT39S5pe8k8dV7uumjYAE7jftoZcD/2ki8MWvnhi9bdAZvveBsfEexgi075lZZFgqOZiaqWNuqcH1sGFjVQZDP5YrgJ00sxYQNwFHicO2KivUduAZvbZ/dLE2Hd%2bvnQqy%2bM/fKUHVIOs31%2bWMOiWB0roBcO8PA3MNYIDAe5MSTkVCK%2bnc6ZWkMaRtD7TsHKDD4zaN5NLIa6M6JMXxkDTjcB0XfX1d8Ohpe0LYOCZ7NRDhnjljIbvRzHemkD9yqIDscm3ildfKz585MbdQWZic37Ch/9XDD39Eurz8NCef3PaaicB9n3kok5uspOOdt%2bwe2tzVt/fD79p66oIy%2bL/ciY3/YRkR8wwGK8stlJcaqLRUVG0Lhk5uTySp8QXxb6z79LMZnw/gCbyHTA91SooNidwU2xMWlHTPCCcVVAsMtu0hFLcx45r42Ls7MNytYH1KFHL65YxQ/Dz5Kjt/2/raX/6nbx7PO5b%2bzKGn5/JH5PX9szl%2bslUZAT8CErjLU0FG4C1G4JtPTnzwH71386epcKOqKHvyyx5en7Yxm21gerEGKl8UDSucWQv0rMSCkwlFwIbTr2Vd5K2BPNgDPUosBNRIOtNWgr1Gyaa%2bu8xFwB3kPuG7tnDbR3E5m4bDHSRWNO6Oi8EIeLIqMe0iAVX8SPdoKq%2bOKhJLhcMMAXbXY75NYwzdYYZ4JCo%2bpxKlAGJpBakOBUVygOkB%2bkPA4z%2b08pOT88%2bcLYaXX/7Oi081rNJL5yQL9xbPLrn69RyBgJGffr106%2b777t498vk9BxdPIZWoOIO5uoJCgWGxUAWlXYu6BIxf//Q0TtH8nNQrVCNeK4h5y5IbH7yTxl3sRuFsvKqxlXtVSBNgnoq%2b1ZYZWpaLpaoHt0fFvm2d2JbxsHeDgf5O5SINfMljP/rsr33//z71yvQLxw9/Vk7Or%2bcTWfb9mo6ABO7X9OGRnbtWIkBJpw8c2Jz6wP6%2bX3/f7sFPkkNMvujh/FQZr5wHSrUaPFWFaZLDhIpkWABwWugHkgA7JWQGLHkA2hME1Ekm4w%2bUu8X4oL0dsAfQnld59BeqgkrJpgS%2bxW%2bwwq0bu1ST69w5UNcCxxkXuZaYHojKp8SpM5Rrql9enSEatqBYHRhJOdAVE6pmIhIlBh/wulT0dinoCANKJzAxDyzZmJsuYOrs4amTRw8981R9cfalraPbZaGja%2bWklf34uUfgwMGHMq%2bfu3Dr9hOhIuoAACAASURBVHvu2L3pF/bfe%2bFC635ERZK33nQwNdtEselyCU3LoWrCZMV6ceXWQOZCCegE3Fen%2bb4zzVsdpULSPN8/nmwmfdqAEulpIQtKur9FQi7Xx9M9p7rkodkELNXFoqFja3cM%2b3cr2LfewGDyYgD/5NHpr79wsvDsH/7OC89mT/2qlM%2b81eMj15cReJMISOAuTxEZgStEYPS%2br2T%2bySfHP/qlT%2b%2b%2blzFGRZOGjp2uYibnIlcGypU66p6CSFhBZ1hw3py99tl0YtDpl5b%2bjvtseiBJiZkC3HPnljWiV0o%2bJUvHdpcZkaQqZC70nlh4Au8kYQmbVAFS99l7GhBZPopkVFqZZDFiFx73UndcD6qTRDRqoTsCmIoGVQvBJLbNEKXba2Fg2wYNNJQjU8B0HnP5OqYap6ZPHvnu4afsxcmXPv/FjzGRULoej371/ZJlk1eTjMAlIhAkuE5na7eO3XP37tSO/ffat2O0p6AMzmQdNKoeigt1LLVs6DpNrhWYhgIrkMaZni9bA/pMAwtWmxf8Txpxn33nHvH09M5SRN6KSbUW/Eb95NaAMHAsoGl7cCwbF2BiUzKGe8YVrIsr2NKr4yPbRBtiYbkfnZj5k4987NAjEsD/pAdJbicj8MYISOAuzwoZgUtEgCqd/vb/OT7%2bkXu2fNplbISKJhFof%2bV1G5MzdcwUGpy6Jts3ksTwJK/AllwRgJyAeSCNoe85s952xdF3HMxfIjH1oguTM2TCRSYoqkLfzzWBwQjZTQaMO%2bNyGfJrJ6adKq7Se/4tebaT8wsAR4tAVxx0h6iOu4EQPaIPmeLHukNBV6%2bKkgs4EYCdtE88bhul3SEsbNcKZ184d%2b7s%2bbnQzOHvvTS1e%2bdQ7uE/kmBdXkAyAlcbgYOffyJz/LWT6X37t98SUkd2pHes33pOV26P9iC1PNEaJPvIbF2BVWzyp2eeq8LUgGiIpudtUjt/h29ZKrO2o34BKJLOtCwqHkVF3%2bgRW9uKHOBrwkKS%2bTUmmIflqoKG1cL6W9JgUQXbMi72jRi4fZPCNppQalR5GewFRVG%2b8%2b0fnDz6etGc/sI/2nT8amMl15MRkBG4dAQkcJdnhozAmgh88U9fGH33WPdwsn/g4HvWhz5ZshRUii7OzTo4MVXFct0SGnZN5UCcwDdn1X1pDIH0dmlM1QZIEkPyGFEtEfCoKFFIbMPlK2sYd/qMpDLxkKiISj7uXI9qC%2b16wJ4Tv7Xk2zzSI3RqP2D06YeffoAJsLsug%2b0yZGIxdJoqNMNANGrC6xAm0%2bGIiv5%2bAdZv1ZD92g8t1apW8gvLtYlXX1t%2b/qXvP/vShs3drx5%2b%2bBOSVZdXjIzA2xABYuFfPzl3a9%2buA790929suqehIHVLBIOvTipYfrqMesvDhZILnWoyUL6MwqD5FZ749X8FLfzVdq9hv9HfhiQ5V1zo/qMBS4sqHMcFTA%2btpo14dzc%2bdIeO3UMatKTifjQjbOyfBdhDf3zm64Mdzef%2b%2buuH//b44f9d3kOu9gDJ9WQELhEBCdzlaSEj4EeAvNjvHU989N53jXCXmFoTmFpwcOL1Ki7k6vA0gGkal6h2hIUOtdpcDV%2bgVw9%2bU0nTziuf%2bgx8wLZzkC4KivLlUqCdPucXJ//Pqm87tSWcYYREhoC7SEIFwoaDhYZo0/bBegwKouEIusI6EhEDRshFMx7mO28owFifikQKKAF48VkrPzVTeOav/vzII6RXHx0dlnp1eXXICLwDESAt/OnZhfToHXd8QEttuHf8rtT9JKFpekBuESjmali2SHNOFpMKUimXg/n2e8el2Pc383hfRf8%2bFHgTzL4SCg1YLmjo6bW5RK%2b85KJaZ6gzDwPv6sX9gw42bDCxswPs7j7BJfB5BvO%2b/ht/8vy/P3x4MX/kUeku9Q6cWnIXN2AEJHC/AQ%2bqHNLVRyBIOn3gjh4C7J8lOUy2YGEu18TpGWChUAVTVThMQW8UUHThwVz2NewdJAcnhxhfq057DpxhgqTUQJNOzDwvtnQFE2cC4cSqkyyGmPaI/0p69qDokmXpvGy5x0T1U8sS1VGJWSenCsd10RdNYCDhQTNiCBsu6vEw6hYD0xVs71URGgByTeCp1zB38vDU48W5CxNHv/8PL%2bVO/vr3rz56ck0ZARmBtzsC9x38Smb6XO7Wd%2b99725n2x33xt6L0cYrLpfRqA0Hy4UapkrCk12j4k705G9NNdY36xNVa1V9yp5r3K8WsAcN%2b8k8/IUXcaIkd4alnIdQxMKsZ2JDZxx33aZwB5qd6xR2azx4GMhy//rPXnzwb7/1yu9L95k3O1LyexmBN0ZAAnd5Vty0EfjOM2c/%2bEt3bfg0Y2yEiiedvVAfyi7aWK4A%2bTJQrDc4p90dEz%2bMPME0YNFX2HDBdpNOPZCotF9UAYhvD/IKcPd/L9t926niqaqu/opyG0mTii6JVmMm4wmp4nfTQ9514LoeqJp5OBRBT0iHqhmIxgxu6UhFmupRhnW9OqIR4IwNPHkcc6HZ0pH3raue/W8/nHhqbMvA5OOHXs6n14/h4d8Zk4%2bxb9orQg78WonAgc88kanVzmPvvk28Wuvk0rpfSH1g%2bz1mF1LxBWewaito1ERC67Jtw1CFdI%2bA/FVLaAIa3Newk4vMWwbwgTe8xnhROGqysKih6bhowEWyM4ntGxTcuV5Fd4eOT%2b1UfJctllPAvnf05PzpDx/8/iPZY/9Uus9cKyef7Mc1HwEJ3K/5QyQ7%2bHZGYPTAtzO/92uj45rOxt//7g1jAPYB7tDkTBOnpx2cy5ECpoFyS0HIVLn9IS0Byx4PKp76nSL9etJcdY2hj0nLfqULKwDugc498G3n%2b/EZd0URXsrUUth0QCw7d5/hDjEO18gLwK7CCIXQGVIRDxuAYfLvKMm0oxMotRTUVQVRD/n1rP5qcjgyd/pEK/vQd4889dSTk1PnnpY/mG/n%2bSXbkhF4uyNw4DPfzpw%2bPZ3%2bF//rHXctZnbvsWeACwnl9g4du/ILLTQ8FaVsHbkmQzzkQlV8T/ir1cCrwFJeRXfq0sx7raUhFvYLvq0dHL9fKaIitCeSaJeXVSgq4/enluIiYisYvq0bKd3C7bdG8KEtYEM6lOksy63PYOoHL81OfO2x4jce/I2x777dsZPtyQjciBGQwP1GPKpyTJeMQPq%2br2T%2b%2bP961/jg%2bpHxO7ckP6soytDkvItSzcXLp%2bvILTfo%2bTMMU0WncETkHuYE2qsOQLKYtU%2bUOaC3xXfccYEYKF9GE3SCgPqlQDoH2EHVxDb5TOACQ0C9aas84ZQ%2bI65q0bXhuQwdUGBrEXSFXMTCUcSiJtyYAsMAihZDT0yDkwTSceRffdHC67nmmdd%2b9Pojx5/84aH1W/pyMslUXiQyAtdfBKjA09y0SGi984ub7qlrSK3PYfDw8zam52r8RqOpDOQCS%2bw7CfvoHkbLWg08OcgEyfLkGnNZxp1ydJoaYsTIXwq4k6uVz95HQx5aLj2hZKiXFX6vajRdWD0a0koEo3eb2JdR8SvbwaIMShXgTldf/rN/%2bH1XYV87fGgqf%2bRRmQB//Z2ZssfvZAQkcH8noy339XOLAMliNqxLfnr7cPc%2bAuzZZQ9HXy3h9SyDyhrwFBURU4FOGnZij1ySqAigTqC5IYqNXnIJkk4Du8fgomrXtAcgfW0D7TKZALAH65AUpm4pWCbnBsbgecJ7PRW30NeRQJgXRxJymHxIwXCnilgMsPuAchn48aHc377w4vnnn3vs6Zd279r26mFZivzndv7JHcsIvN0ROHDwK5m5euf9%2b3Zs78u9b8fB9%2bzFrmcec3l11vPnKvA8Bd3dlMQqADz9vx28BzA8KOj0U1lL%2bgn3QSW5ILGekw%2bWgvKih0aDwdUt9A/14EN7ddzer2J8i8Iygu/AYoudP3Fy%2bi//h09855HsqX8upTNv9wkj27thIiCB%2bw1zKOVA1kYgSDz9zC%2bv/80tQ937mKIMvXLaQqFQx%2bwSMLdcQyykIWSQPp0e7wIdfgIptcUtHcnGscWJ%2bNXypv6O/PwszrgnfbvHYLW2%2biUr27Wz7tQE6d8bts%2bm0w%2bco0ODqI5ou65INtUiiGku17Z3RBIIaS5cm6HWKTwozaiKVFKF1gf892cxV5lYOrI7fOHskydyT028dvKFTHpUFkaSl4aMwA0cAUpmJS381ETnB61fuu1gzzqkSq%2b5g4WCi9ZyHUXL4VIWw1BEIqvPwAdVWN%2b2gk4UY%2b6gpSFm%2btMCIuPJ9UrxUGvosB0XSxUXXT1J7NikYktGxea0ik/uaIciLPfbX33lwf/6jRdl8uoNfN7Kof3kEZDA/SePndzyGo7AoefPfvCBvTzxlKqd4scnqkO5ZReLFaBYrsHTNYQ1wNCFt0LU164H7jABgUTbXsoFhr6vkD%2b7uZqc2l5ciW%2b38h8/UJdIRqVtmo5wqiHtOgND3ANC4QhCioO%2bZByW60HTTT6RqEbBf3jT2zW0JknDjvzDZ3Dmo83nnj18qvbUhuH45KFDJ/LxdBqHvyrt1q7hU1R2TUbgbY0AAfi7921Kzc30fLB708jWxfH4/cqkM5hfYmhaDLl8BZanoSPKVhJYufNV4Dp7CTnNVXcwAOyBnKZNX99wyCXL5TdKy1F5TYxyzYMadtCrM4zs6MH47SbbMqp46wpQ9/ZAYWA5VVEm/91f/egvPS3xzJc%2btUMWbrrqgyFXvNEjIIH7jX6Eb8LxPfLUxAfXrd80vnOd8uEQsOdCzsOxk2XMFqmAUQNhg7zPVV5EhH616Dcm4lc9JQacs%2bZBMVLStwduMn4sCWyTLIZ820stAd6Dv%2bmVV0P1izG1h3%2btLIaYKJLCkCCHtKDUE8dlCFOyqSncYWIxE4yKJJFrTERD1WJoRYEOG/nwZuTvVTD/%2bw8ee%2bkP/%2bSH39u%2beUjKYW7C810OWUagPQJj7//Lse17dnxg6wf23FsewahyAoOT0za8ahUXyEaSs%2bAer/jMtTOrOH6lmbcsmwl08JTEGix0S/NdZ0j7TjdWso3UNIZqCXBsoKE5SCWTuHM7w9jOELo64O6KQV0fg3KGCjf9ycTX//U/2/TXv/XgS9Nf/tweCd7lqS4j0DbRlsGQEbjuIzB631cyv/Hrd41//P3bvkwFlLLLDNlFB0deq2G5XkcspiKsaGDqarVTcoBZC9yDhC0KCEHmduBOf9dFEVOihUBFlnhSqg/mA8922pZXRm2uym1oG/rRJNkN6ddnah7iVLhUiyCkAlHdRSIcR5ysHF3Gq5rS4%2b2EocDYCKxnQK%2bK7J8/XijkZqYeOz/XeOqp75yZOndUOsNc9yevHICMwNscAWLgK/XO%2b4fv/8X/w4iHU4m4Mjg5xxCy6pguunAcBQSoKYlVWfNY8S0D9%2bBmya1xVz3ioyEXLUpeVYF6CejuZTzhnkiTWhlwHYZyxUG9U8PdW5PYmnHRNWSwO3cq3n5AWwLYb59nJ%2b/Ls6PPH3n%2b/2PvPeDzqM7s4XNn3l7Um9VsuRfJlivGNiU2YEpilkCyMWFJNjEk2X9Cypd87JJNwiaEbEj5vEsKCSSEEkgIu5CEYJpNDAZccMO2jKtkWZbVy9vLzNz/99yZkV8LGWSwLcm68/vZr/Rqyp1n7tw5c%2b55znPP3V9eLMH7Ge4ncncjLwKScR9510y2eIAI/HXjoau9qmPl0rmVN/XGOHbs7sWRDqCbZDGqgkIfQ0y4HZhA22bFCWgLqYzlIkNAnsB15mLfJH0JV5ZvO23nt7azmfbMQky0D1snTz8TYI9rBmJxhg5NQ7bqQ1nAgaBPhepyw%2btIIeR1iVLnOT4VwYkMeeQSowM/XYM3aprffG31T15%2bYdK8qW9tkomm8j6QEZARGEQEqCrrgcNHZ5bMu%2b7DJUvGXl8SYGUtEarAauDw0TDSOhOOMhUBN9qS2jvcZwZxiHeuYiUAxZPmYEosOy1uxwkNDc1ccmZmAzU3MuHulc5XMTU3gHmXubDQD5RPZ3oNoOQCbB%2bgP/3Q5i/%2b/tG3npKFm97XVZEbnScRkMD9PLmQo/U0cqf%2bqubNl274VlVpLmnZK3Yf1vB2fQRNbXF4vQrIDIY8zonxyezsBLRFJUIhVDm58Pe7adopzrau3d4hyWJo35TISovt427bQJruMgbIcs2ABq76kO/SMa7YDQZFgHXyQI6ldBT5nFAnAcePAevfRnPxgVcfO9gUWT%2b9prxh3ZqGdukMM1p7ujxvGYEPFgHhB799b1HRBf%2bwqviqyRfPr0HtgTc1kAa%2buy2G1gSHUyUJILfNYT7YAWnrPskh6ewVMU6SKpCY/liSeH1mesQzIjRUpDQdobABt8YwZ2E2xk91YorbwNLJKi91gmmgCVO%2bZcfbzc98%2bl9f%2bfVuaR35wa%2bR3MOIi4AE7iPukskGUwS%2b/4e66ol5WuXHLqv%2bNBVROtIcr0jENRw6ZuBQSwzMoSDHazrF9NdwCk900pf307OfKrL2%2bgT2BcMuErGsFwEhezEXYtdpIaBO9pGiYJIA8gp0XYfH5YFT1eBkDmS5nVCK3WaxJG4IuzZXlYKeXmBST3RtQZWv%2bdXXD72%2bfktH0%2bG69i0SsMt%2bLyMgI3AmIvCNn%2b368KEj3dNnLFg8ZbfK5swrQu3ufUkcP55ASKcqrMRycKgWg0HD2vuSzliyGeEwk1Fhlc5Bt1h%2bGj2J0CBJDQF7ReUIdwFpp4FKdwpjZxSiqpAjr9CJcdOgT41Dee0ob5vlw5HezsZnrv3U80937/qctI48Ex1D7mPEREAC9xFzqWRD7QiQlv0H/3H5XNVlzL1y3rjv9kQ4dtaFcKQTiETj4A4mQHsmmLa3tS0c%2b2vSB2LZM%2b0e7QeXLbGhad53uMZkXCLxYpBkoiAKyWL8GkdZrhsl%2bT5ougGnqiLiJcadpo8VlI0BqvNZ629e7Op8%2bsXGh3as27BmyuTKNgnYZb%2bXEZARONMRWLHqseL9%2b1uKqhcvvuqK5fNveWsivE3PpssoWV4LxdAS0%2bFzcig2gM/wgB%2bgDFNf894B8Pt0hlyMdQlLOkN1ob2UsGoXyrDyieKUvMqAUA9HNKIjma/i0iInPDN8mFHI%2bEXVzFhgufO%2bBOibH9z4xT88tltKZ850B5H7G9YRkMB9WF8e2bj%2bEbjjlzurv//5md8mm8doAhUH6kPYUc/RG46DKwxul4IszwntS2bVb2HhmAJs20YC4bT017XbDHuInGMsDTutZ2vcT6WDtxNTDUNHKGGy7H6vFz7VQL7fj0CpE5oGxIiNJycbt4I5U4FGHa17/962%2b%2bHn2l7oObD7IVk5UPZ7GQEZgXMVgZrLflVTPX/OVemKyStzJmUVJrq0stZ2jlRPFN0pHU5mwOFgcJF1LgN042Rp4bvaSVJeDyWnWgsx6yaEtxcuGHdavE6jT9JIM6VUuKmrzYDh0BFTFJROzMOKBQwzy5i%2bKAgl7gLGKmCPbzEeyUof/MNd92zdKsfOc9Vr5HGGMgISuA9l9OWxBx2BomX3Fz/5/y2/dUl1%2bXdpI9KyN7dGsfcIVT1l8HiIhlGERSNVEqUlnLTcY0hqmWHhSH%2bLJE3XFwHcMwos2S4yNgMfIH9368kktOuWNKbPLtJm3sV%2bFLSlkwjqDIW5HhQH/fC6NcRSbuhBZkpniGGqUrAgCLwWAl57YP2Pm9tS6w/ua9yy6S%2b3tA46IHJFGQEZARmBMxiBmovvrZl38eSxh7vLL7/qtmm3HdqlIZJm6OjQ0XQ8Ci3BEMwBPE4dRS43mq1knlKPCy2ptIDjA0lq4mlFSGFMTTsRFmZWkQ3YBZg3ToYiBNxpOxVcvCikkgaONaYxpiqIaxY5kVPm5IuqmTE2DqXSCxaL8frH1jds%2bO%2bfrv2GTFw9g51C7mpYRkAC92F5WWSj7Ajc8cDO6svmBK%2b7tHZcja1lb2hO4Wg7EIpGwVUVTlURFU/tYiI2cKd9CLmLBdppClZgegvY04eQvvRzkhHuL2T5aCVSka6d1iHwf5LHuyjnbYroO9JpUTipONsNryeALL8TWtpAyGvSUwwMJTMdONoAcoppf/QvoQ3/MKX%2bgYPHlMZ1a9vb1z5%2bmQTtstvLCMgIDGkElq18rPiii8cWquH4uOPZH7quMcDmXHEZajc/m0RdYxThEIMnwAR4L/W6cTyZAqWc2kDiPbXwfb7uJpC3Ab1g2zOWaFpFwK2DMW6u59EQjjJ0h3UU5mYjp1DFwrkqllYz/Th5/7qhjAdvP3Sse/0Flzz0ve7DX5O69yHtSfLgZzMCErifzejKfX%2bgCPx1w76rr1k06dMGME4BSvY16hUNR8Oob%2bdQWRIa2DtZ9hSQlSFvoQZE0ydAt23hSIx7ZqXTTI27zc4LpxjLp52qpGa7M2Q14s4xrR3Tuo6ibC9Uw4GgV4XicsHQDUQDlOPFoCoqUlkM6lHUza7lW59bs791x4GW9XXbjm%2bRU7sfqIvIjWUEZATOQgTIA75sQuX8gGv69MLppVPq3WxOui1Z2xknDXwcPek0nA4a28yqz0ROkPb9PYG7xaaQfKYPtNta9/7noZisPK0nqA/FQGuzCncgCVdMRfn0XFROUzE1i6F8KvSqOBRfABjHjd%2bv3dLw%2bLf%2ba/dWaZt7FjqH3OWQR0AC9yG/BLIB/SNQveKx4iuXjS1cdcvC2yd72E2dIY5wnGPb7hCOdZJjjMWye0zy3GbYbXadJDLEwIvCScKKEUL3Tk4wwrOdqqSKqqUnM%2bh2O%2bhBRGA/4DrhFEPrE6CPp2hbA7phIJJg4IoHuW4dJcEA3O4Ukll%2b09oxbUBRFASzFVwyHq0aoPz8dzsf%2bsXPX354yuQJMulUdnsZARmBYR8B0wO%2beebCf/rHTySyipaXlTvLDhxMo6cthiMdHHk5JDnkJ81kDuqkMrTv/dl2e3uSypxYqFiULsB7NKEintKRjqRQOLMEi2YwjPczVE2DvpxBPQTwZ548/ujGLbueaGhKbJHgfVBXRK40giIggfsIulijoamUfOpRY0v%2bfdUFd4Cxih37U2hpjeJgC0dCi8PnVeHI0LJnJp/aAF3o1NN91bwFACcQT9/3VUnlph2kcIcZoOASMew2c2%2b/EERSBhJJhlTagM/nRb4riaA3G7lBDi3gAiWzhpMGCvwOzJsOHE0CzYdQt3nD5mfv%2b/mWh1t3fUlO346GTizPUUbgPIzAgmv/dPPkT93w1QXLee2e5zXsfTuOYx0afAEGn0uHqipQMgfkAWIQTarwCwZ9kEufK425firFwKjqai9gaAa6e9KYNTMXZTVOTCli/JIZzChMQBnnAYsZfPNPf7v9lW/fOvcbgzyaXE1GYEREQAL3EXGZRkcjf/Dwts/fflPtZ0iy2NzFsfdACA0tpDePwuAq8kh6ophFPChhtP8zIlPPbuvR%2b0fOrpJK29M6xLoPWHDJ0rMT807V/zSug2sGPD4vyv068nO9UDhDr9eFUFyHyhgCxQ5cVAE0/f8HufMn3U9dNv7ICy3t8Q2vvnKkfe3jN0oN%2b%2bjoxvIsZQTOywis/PJLxdu3v1W0fOmMsS0ll38xq0Bb3t4D9LRF0Z1MQzMcCLg5VNW0yiVm/LRA%2bntEzWbgqQorHSMaBrhuIBLWkcxWMC4QwJylbiytYvriPChpB1AK3v7w8827Go51fuXOVbN2n5cXRp7UqIuABO6j7pIPrxO%2bYOWfi8dNKJz/H7dMvnlyRd5CzlGx%2b0AYR44bONQaB3MweESBvZMdY2zQLlh2cpKxElHJ7pG06LYURmguMxh1KniUCfgzk03tyIjvGLH0BjjncDEDWX4fHNxAbo4P6bSGpOYViadZLgX5xSra2oCWhp66fW3RfSXOpheSCceGNWsOtEsN%2b/Dqb7I1MgIyAh8sAnYC64GDuJpdfuFK/Viy1qEAR48lENJI%2b672gfd3sCunOHQ0bWrlva5%2bA3T/9e1KrAzQOEMyYtpTJhI6DKQwpigfpbOcuKhCQcV06PM0KNsdMK4w%2bNafPrblwV89cOC1w6/cJGc%2bP1gXkFsPcQQkcB/iCzCaD09a9m99sXrujJoJc6cXe29p7UxVNDYn0dVr4GBLXKBnp8ME7DbYJqa8v81jyALvYiWrqmnAYyWS9gPuffHOKPyRCdjtaqehlCF82LkSQK4rBb%2bbwefxCgebCGWsckqQVZDrYRg/Ca1vMnRm709vrdu9//Uf//dO%2bXAYzR1bnruMwCiIwLTFP7t83nXXfCL7Y2OXJ5uA9j3psp62OELptADuTufJiat2SAZMYBXOXwr87wXc7Z0oQEpXkAyb7LsA71GzYNOCXCfmznIjmO9E9TToM8JQ1mfD6P5T42Nt0ebXn36q/ilJqIyCDnoen6IE7ufxxR3up/bKjsZvLZlZ/hGAzW9q07Fjb1iw7FSgw%2blWkOOxdOkZvuzErp%2b0WD3YBu9k23iqwkqniscJWY0hdOqxBIOm6ygMeFAS9CE7SM4xBoygS%2bjiGWOYPoahohBwAa13/r7x9aOHjv62bttR6RIz3DudbJ%2bMgIzAGYsAuc9kl0//1LTlFy5t69GWxw2GpgNx9KZS0HQGhwr4PYBO0kaLWHFkMiX2z/10j%2bGkiuB7aeEFeGdidpQT42IAne060tBRnJ%2bFmsUuTClgfEU1M8oNKOQNHwVv%2b/mvtz3yH5%2bfJ3XvZ6wXyB2d6whI4H6uIy6PByqm9MZDN9xbVZr9saYOjsbjaWza0wndYPB6mGC1gx7TLcYez0/KUWIm604g3gbs4plgse0U4v6FkgYKu6iQSoM5OcVwHdG4Ao/HDZdiYEyOH9k%2bA0aWCz0JcqTREXQ7MLWGYQJj/JkdfO%2b2PY37fnb307/s2vuVF%2bVllRGQEZARGK0RIADf2%2bNbPv6jK76aV%2biuJcctKtzU0BBFQT4XwL3I40JrIg0C7uTTrlijuwEGv/M9ElYt/3eKb6YLTTytwmsBfJHjpBjoaGeIRjjSOQwTsvyYfakb84MG8qep%2bgIGyZQJiwAAIABJREFUJQ9gD/zt4CPNrbF7pO59tPbYkX3eEriP7Os3olpfveyx4ru%2bOXfuiksn3UkJqNv3RlDfouNYexScUfKpIoC0WCzQbndQG6gLKYzlECOsHgXoPmH7SOwLVUQl68eBkk7tgFGRJXKeof3HUwxaykBelgvjSzxwkn4yzdHjc4MZhvBiLyhVEXQC%2bxtQ99uHNzy0ZKb32XVrm9vXPn6tTDodUb1QNlZGQEbgbERg5ao/F2/fvreo6IJ/WDVhxeSLy6ai9u//q6O3NYzsbDsLyaLdM5HHezjR0CBNvu8CtJ/K853%2bqACqAnR3M2HJ6/AYiEeT8PpzMWOxG4tKFUyYBn2aDiXfATgNvuUnj2x5cPXP6l5r3frPUvd%2bNjqF3OdZiYAE7mclrHKn/SNANo/f//zM6zjnogLqvkPRikPHNBztAZxKQrDsBLTFdKq1UOcUgN1j%2bTjaTLvlyS7G6lP0YDHM97N5tPd7osAS%2bbFzOBWq0OdHVZFL6NZ7vKRhN8iuHXkuBYai4PVxqPt0DMefeH7Hkz/7dZ3UsMsuLiMgIyAjMEAEvrZ6x4cbjoWmz1q%2bZOlzG9JTjOzUOD2qiSlU0443o3S1RdL0lV7ttz9hH%2bmx2PiMZwN9k4n3hfyGWPmUAofKoViWkUTIcEcSpSUFuGAakFXq5BdVM2O8DmVLK9rmu/mRXYcOP7Nlf%2bqpb948XbrOyB49IiIggfuIuEwju5EE2m%2b/deZ1QcY/Qkz7/qM6Nu6KoDcWh99lJqAK0N7vNAVwtyuhZiSdRhImq05ymL4iSqKO6Ynl3Sweaa1QwkBa05Hl88OvaMjPdkMt8EFPG32e7/leB1xT0TrPwJHfrjm0742tXU88eOcFz4zsqyFbLyMgIyAjcHYjsGLVY8UH9jbPvOimT36iRw3MORJmtXrEDaczhJTG4HXpADcH/UTQDU9PcpBlV812E3An0qXE40JLKgUXGGy7SCrUlNRU4fceD0GM8wldw%2bSqPJTkGqiZ7eKTDJ1dNMPB4wDaOG/7w%2bptj3iznQ9J6czZ7Rdy72cmAhK4n5k4yr2cIgLVy%2b4vfvQ3N946s9L73dZujtYODRt2hRFPJZEbUATTzgixD8CO218JAxgLpNNhyNTFdpARPuwZvXggmUyfvWOaGH3LLQamW0xpoR8qGIxslwDzQnbjVJBVoqCygPG1L7Wue%2b6VvasPvnVcJp7KXi4jICMgI3CaEShd8Nbtl36h6hMx3VWb0oCjTTFoSY6cbFH3GqoYwM1BPFPpPqD7TMaxUwZHsdDNp8Q%2bTlrfeniQJLKzh7SPBsJRHTFuYGpVLi5f7kKVaqB4uqrPAZQcAGu2G4%2b%2bsXnbPXd/Yb5k3k/zGsvVz20EJHA/t/EeVUcjpv0T11bfXl3Cbtq1P4JjbRoOt3Mkk0kUBBkURQE/ldSFZDEJCCtI27mRZltpPBZujAYlOJl/p12IBFNryZTJ2KA9mjIQTjA4FQ0%2btw%2bTxnjEQK8LwC7oG/H2MH6MgpIS4Pke1D3075seijTtfmjTX26ROvZR1XPlycoIyAicyQjMvfpXNcwZmJ1XecXX4uNzZvndHB3tIQHc04YDQY8BnbOTzAgGBO6WHIYYe80ADEL6qgnaT7V%2bWmfCMjLcC6STBjp7dJRXBlG9xI0ZhZzPnqAatW4oWSrwxka%2bLpo%2b8NOPXDLl2TN5/nJfMgJnMgISuJ/JaMp9iQhQEuovfrLo1iUzK4WeffveSMWuIzrixI7zODwuC7SfIimJgDdp2wmRB10ngHtcO2EP6XObMhl7GaiQkm3zGE4ZiEQZCrI9yA9o8Hs8cEBBt9cFRQB2QFVVzJzJ8NgTet0ls9Nbf/G7V59oaejcIiueyk4tIyAjICPwwSNA8pmK8RXzdzcVXD71%2binXtx5KlyVSHM2tUagOJjzcC90uHI%2bn4RgImZD9o6Eg3svhDTKoio4ilwutqbQgb04J9JMKHA4u5Jgkr4wnDaRiKfj8uZg2jqFiqgtzKph%2bSQDKOj%2bM5RG%2bdc/hxme%2b%2bu3Xfy393j/4dZd7OPMRkMD9zMd0VO/xzgfqqm%2b4csJ1U0udH1GAkj2HtYq6QzG0h2PwOhkcpGcnx5hTJI5S8ES57DQQMOsciYXcZmw9e2aAT9qNXVXPktaQPp5gfyrFURhwozjfCwdTYGg6ev1uKETbGwxul4qpE4F0G9b%2b6aVNT2opx4ZXX5GOMaO6I8uTlxGQETgrEai57N6a2Vd95Cvemso5ucUo3PFqqqyxMYa8fG55ADMz0TR5spMMadZ7uk3fdncAcKkGNIP15bVmAneqxNpXzMnal0pJq5YBQqjTgNOTQsCXi7xqJ2aXKlg5n%2blv9QKpLOCaNr7112s2Pfj0U21PbfqLdA47Kx1B7vR9R0AC9/cdOrlh/wiQnv3fvj5v7srls%2b5r7eYV4aiB3QfCaOqMgSpx5LpPLY3J3JewakwBfkvLTiD%2bRJEkc83M5FMjo0o22YHR9uEkTb0aSKU5inxulBT4xECe8HkFmx9J6shyq6iuUFCQh9Y/7kl2/uC2NT8cX6I%2bLy0eZd%2bWEZARkBE4exGYe/WDNTOvvuwrYSVrjuby1B6qT0BLG/D4OQJucvkCEmlVTLemOYPHSVp4oLdHAQlqPAEGl0MXxIuti88E7pSoSnOpfqdlWSCeCxwdHQqCuUQIMYQ6dTCnjk5NwYKLcnHtVBXzJ0Mvj0Jx%2boEndL738C/W/%2bPdX/6Q1Lyfva4g9/w%2bIiCB%2b/sImtzknRGgokp/%2bOGyWy%2bdW/Xdlm4Dm7f3oqmbI5aKoyCgiiRUokYGYdkrQDsBdWLcaZtMpr1/8qkN2snT3fRkB3qTBjRyjPH4UOgzUFroRczrFoWUwnEdDsYwNs%2bBCyYCOxuxds0L27ff96u3Hm6SXr6ya8sIyAjICJyzCNRcfG9NQc3lq0oWTbitu9tAc1sU8SiHAxxZeYqYcSWAnu90ozOdRlxT4KNiTRyIJan4Es2aDq65BOZJ604be506EpoD0W6ORFRD2EfgPQeXTFL4OMNggemqfjmD8qTO97pfffsbP1i9Y6uUzQwuznKtsx8BCdzPfozP%2byP84NE9n7/9xmlLAXxsz/4I3jykoyccBWMqcgM06zk4pt0OVF9FU9K5W7KXkxxmxJcnwhpwmsmpoZQBXeMIeH2ozOHweLzgWU70JjhCMV3IbYp9KiqrFeQArT//ddMjqqNbWoCd9z1UnqCMgIzAcI0AVV1dNPfKTyVuLLut6WW9LB43cKAhAj3OkJ1HwN0QDPnJfr8ZUhqbVX%2b3EzxhXCPWiidV%2bDw6UpqpnYmFNXRyBfMmZWPOHBWFLoaZ06GnGbAnzPd5NzRsXf3Ttd/YvVYaFQzXfjSa2iWB%2b2i62mf4XKtXPFb8i7uW3LqkuvwW2vX2ukjF7iM6wvG40LO7HIoA2JlFlQZqQl%2bhpQwHmVjaXJOYdGH52A%2bs06%2b2Y0woRaYwBtyKAZ/LjdICsnjk6PW6ROXTSJwj6FKQV%2b7AVPD67cdweOvOTU8%2b/dTup6RjzBnuFHJ3MgIyAjICpxkBAu/zFqz4VLOzcOmkaizf36pjz95eJKJUUIk07Qwex8nsOjHoXleGTvIUxyS9Oz0/3sHOm5PASOnmQ6qzWUMsm2HehBxUzlBxQcBA/lRVv1CFcpzzto5dzS/%2by7fXfH23dBk7zasrVz/TEZDA/UxHdJTsj/Ts3/r6vLkfWz7rTiqq1N6VwKZdSdS3xxHwMDioEuogpDE2Ho8mgYCnz569z96xTxpj5iv1Me2ZjjG6bgigTqC9IMBQmO1Bi%2boRyafhJEfQrSIwVcEsN1rB2O5fP7R7%2b5%2bf3/XjTY/fKG0eR0l/lacpIyAjMLwjUHPZr2omzZ521X/%2bYMk/fG8NKrv395Ydj%2bqIhhX4gpTzxIUN8Gkv5CSTUkCFmUx5DaniTehD/yc1RWjqo70c3JFGUW4OJo3lmDrTxQvTBrtqkspjLiDBedsTv9t051//LAmf074GcoMzGgEJ3M9oOEfHzu54YGf1jDKjkpJQe2Oo2F3Xi6OdKtp6IwK0O53mQDjYxXaRsTchHTwx7REC86Rzh5msSmC9L/mUSlkbQCgO4RhTkQV4A344lRRaHF5EE7qwfCzMcmDZVI5nDuitu1%2bre%2bS/fr7x4datn9s12LbJ9WQEZARkBGQEzk0EVqz6c/H%2b7XuLZt34mR9NvrRg%2ba5taYTaYzjaYSAvzzBzpWh5r2Sp/s21wPuJr7lA7ZTqSguBekUF2tuBaNRAmqVRW1uEpYtVAd6zpqv6JQxKN%2bdtT/3m4J1xj7bhmzdPl0mr56ZbyKP0i8BpwCsZOxkB4IZ/2/ThJ74//2bSsze1Gdi4K4wjbTF4vTSVycxKqIPsVX2yQ2b665IkhgA7FV4ipl0A9iQ5A5jUCI3ZCUvLTsmnUAOYmKMhJysAI8sJQ%2bfoTQDRpI7igIq8CgWF2cBvHjv%2b1K/u%2bt/vtL79JQnYZSeWEZARkBEY5hEg6YyWt%2bSOKR%2bfcn24ydS9Nx7tRajXgcJi8hM%2bhW/7e52Xwk2WPWW%2bAFDRp4BHQ1xzIBEGAvkc0W4gljAQiqexaEEB5tSqyHcy1EyHPgNQsgHsaDEevXr5L37Uuks%2bU94r5PLvZz4Cg4RYZ/7Aco8jLwI/eHTX52%2b/ccYdACr2Nep4Y1cYoWgMAZ/lGkP4epA9ilazWfT%2bVo%2bkiacCSySfoYVAvO0YQwmoLsZRUeCBx%2bVBwMXR6nCjN0YMO02nKhg308GZwts668IvrPrCX14aX0EWj1IWM/J6nGyxjICMwGiNwIqV9xc39/iWX3jTyhvZPCxvXJ9GqC2GHj0NJ1VLJTnm%2b2TeFcbhIemNlajqdBqIRwFKy6JnWFoDkjEDES2NijlFCPp0LJ2m8AtqVGNyEkqxG3hpZ9eWT9382CoJ3kdrDx268x4kzBq6BsojD30EzEqoS25dMrP8I6Rn37U/hJZOjreP0kinIs87OKtHOpPM5H5yeSH7RnshDoQkjEIq4zKBvd1BaTANJUnLrqMixwe3y4WAhyPlJ192A4xmPhUFymQFFynY/ML2yL6O5qOv//i%2bA68dfukfJNM%2b9N1ItkBGQEZARuC0IlBz9YM1k2ZMvmrugoVTjs9gy5s2pMt62mICUKd0BwJenmkw9t77Fs8cJrZxu6jgk5k3RQmqyTCHwwmQxbAnCCHF7GkzoOUyTPD5UTzLiYWlCiZMgj4bUFoV3hY9xl94bs3ue%2b78wiwpm3nv6Ms1zlAEJHA/Q4E8X3dzxy93Vl8623/dZQvGf6SrNz3/7UaO5rYUWrsj8LoY3M7TA%2b1U/IhAeBYx6lRYqV/gbAJFlLC2eqcBA91JDpdmoKzAh9ygD1qWA9AMhJLmeg6HE6WVHLOysfnuB7a/8rdn9v1Y%2bu6er71SnpeMgIzAaImA0L3v31s0a8U//2jyjYXVu55Jl8WTHG3tYcG6O8mbXQXUwbDvFnCnTQi425sQA58yFMR7AS9pYTiDW9XR2aXCSGtIaDrGj81B7UUujPcx1EyFfowD16pQHNz4znd%2bve2pu78wX4L30dIph/g8JXAf4gswnA9PoP2uz9V8G8DC3jgq3tzZi90NUXBFgdPFkDPISqiZ5ygYd8rgJwBv2XGRNMZORrVlMaR3J0DendSFzaPC/CjPBvJyXIh63OT/iN446d4VTCxVEChB696t3Uf%2b%2bLd933v4zkXPDOe4yrbJCMgIyAjICJxeBEj3buRdcsdl9068/vCLKOs4kkZ9Y1jYRTqd3ExcHQR4Nwsx9VuRElXp4URfCyKeqrXqYsY3oSvoadGRgIFJY7Mx%2bxIXCpwG/1CNapSGoPiygHWvGY/u3r3tnjsleD%2b9iyrXfl8RkMD9fYXt/N%2boetnq4rdevO1eSkJt6eJ49c1eNHUmEPDTgKZAIarczBF6X0ufrt0aLGk/VEQpaPm2M2LZ4zqyvAEU%2btKimFJBUEG3w4WeGA2rQJaLoXqKA8zFW3/74KY771395mtSb/i%2bLofcSEZARkBGYEREYMG1f7p5ykXzLplx%2bdjP7KzT0Xwwgra4AaeTIcvz3g8lpnBhAUkLPYeiIfO0vUEGr0NHXCM%2bnp5IlmWk%2bOBIpAy0NuqoHBtEXrUTSyczPqtKNWrdUAocwN79fN09j25c/fBdkjgaER1pBDdSAvcRfPHOVtPv%2bOWW6rs%2bN1cw7dvqwhXt3Tr2NsaQ5VeF1eNg/dn7M%2b327zQk0j5INmMvBNjpO2LaCbR3xQ0U%2bV0Yk%2b8XwyfPdgmWvSsB5DgBr8%2bBRROBe59DXbJ1071PP1X/lJTGnK0eIfcrIyAjICMwPCKw8ssbi7dvf71o%2bgXzrlr2vSU/3PA/JGnR0dERgmY4EPDxUyetWraQKiVFmfUB%2b/SagmVXdCQ0FYrKEe0F8nI5YgkFTKWZYg4tZSCdSiHgzUWWAO/g4wwwX7Wqk8JmMfjWT3974/ckeB8efeV8bYUE7ufrlX0f57Vs5Z%2bLL1iYVfjVf7n4unyV3bLnsFaxryGK9ggVqUgg1/v%2bQTuB9GwP0Js09e2kTadPeyH5DCWqRtKGGDy9LjeK8/zwO3XEvV4YhgFOdTPIc9fnQGQcWq9QcOSnj2158H/XHHpKFlN6HxdcbiIjICMgIzBCI0AFm2qvvOIrxvixc7KLUNj8drqs8VgYTpULCWX//ClxmhZwD7jJAlI9AdxFASYC6gaSuoJ4xOTcc7I5DNPy/UShpm4daaahMDsbOTOcmF0G1HqA7Bmq7mVAwQH%2b9%2b8/sm71sUPRLWsfv1YW%2bRuh/Ws4N1sC9%2bF8dc5x2%2b74r9eqZ0z2icJKLd284vVtvTjWGYOf7B4FO6GADzgavntDbVkMgXVi1vtmIe2kfmLa0ySVMUG7wXwo9PtQmpdGzOsVaf6Gbm5WkO/A3DK0HehlDS%2bsrXvwSzfMuO8ch0keTkZgSCOw6o5dxQ/cXdO68o5dxY9/gM9V3z9c/MA3xwtgsWr14eIHvmL%2bLBcZgZESAdK9l867/G7Pwso5/FCi9kCThraYjoBLh8PBKGf1HQtp3KngEsllqOgSJaT6coBYiIr4mauTNSQ9cLJPAu4MisIQC3MYugHdAu/TFrkwKZ/x%2bWmdGbUO/WJAeXZD/NE3tm%2b65%2b4vf0gmrI6UzjSC2imB%2bwi6WGezqUXLVhe3vvTleznnCzt7ecXzG8No74kgKDzaAY/Xj7gYzSx9%2byAbIyQxCZPpyATtxMDbjDt1QrJ6TKV0FAZ8yM1yIT8IdDs86IgZUAwOh6qiPE/BmHGM//bXW35y3883PSz17IO8CHK1ERGBC1b%2buRjRNtHWhvpEEX0mOCsRX%2biABg0OLYns8vFjxBf9F/pqAKQyEHjRoaK3qe64Bo/Yi4OKIECFx%2bFuAdL4%2bjeu5E8%2b%2bUI7UAQpQRsR3WdUN/L/3P3qhztck7%2bYPT53%2bbH6KI726vA6yev9nc5lpHFPpBRhjkDMOj2jKGeLyCFvlhnGWNj89AVNe0haaB2v00BCU5AIAWndQDTMkcpRcMGF2ZhZqmCMj2HcVOiXA8ofXzYePXZ81%2btfv6lWkkujunee%2bZOXwP3Mx3TE7bFo2f3Fm37/j38dWxSY39hm4LVtEbSFIsjyqnA4FHBugJxfvF4/Eom4mZg6yIW82LPdVhKrle8jklA9QCxp2uiG4gY4vJhewpEddCHmcZuMBgERg8Pvd2JcKcNbzVrrw79at%2browc4tEkwM8gLI1c55BEhyFom29QPfGvIKJ4%2bZuqCyZPEUvdDQNGje/AlmAgcwqdidpes6EoZ7DDV4YqnXm4wrVQGqkQDA5aSSCeZwTS4adD/2/e44MYzbP2kah6abc/y0LknRUumMuggEVLgpA6C/p9JmmnlXbwr%2bi4PtzXVoDwSBzt2d8Lu040xl2H8sEaL9OWKdhxSHA6/tNdpVhxN7tjS2dLXsP67CAaebtwAujJtc0rZJygTOed8bzQdctmJ1cenF1949%2b7NjP/PKn9JobA4jrSvI9mUkrGZo3L1uHeQCT64x8RAXoN2jcsRTCnwuDUld7fN5J1aeXorpbvSQmN12R%2bsxkAwBiWyOkrG5uKBGwSVZHB%2barHCXA3AbvOEz39l4m9S8j%2baeeebPXQL3Mx/TEbVHsnz8/udnfptz/rHNb4XREzWw92gUQY%2bZiGoCdu8Jtl1QD4M/RTsJNegytyHvdsIfBCTCKRoodahcR2leANl%2bF2Jed5%2benZiO4kInppXwtqMhNOzeufs/frR691YJ2gcff7nmmY0AgfL6Y11FqWgEV12/aGwyFcPMif5y3aCkNecEb3bQG/Qhy6W4SgsLvEE6us/lLqRP3QAWzfLBBfht5zkC7WnC7j0oIkCu6XHEmBeqC2Kmy%2bUCbFze1DGwhxOtl7YIeLo1U9qJ9bQBiPl3i4jHpSBITGSSQ3EzOB2AogMuaks22uwHRlMM0QIvQJreIyGGfYe72jP329GRCmss1dzTq4fikXD8zX1q%2b7664y3dxxqOEwDyuB0tVWXuNvj9WPuA1AGf2V46evf2o4d3Vnc7qr/aOZktb92eLjtK4N1QkOW27gkC7mkGco7UdQav26TT7X4dS6ogQE9LMs3Ec0oQVVRNNWI9%2bzKKjVCOKz2nEhENyaCCvIocXDVHwbXzmP52L1CRDZSB71s06%2befkDPEo7dfnukzl8D9TEd0BO2PQPuF88ZUXjO34L6mNqNix94wjvUCyVQceX5VDFpUPc4qLveugL0PiGTiegugk2c7%2bbMTSLGTUMEMpDUDUPwIsDRKC4NmUSUaBXXzmOQcs3gC2loMNDy3tnHf/b94/RsStI%2bgDjaCm7riyxuLo22HEYlGccMNiwu7o1HMmeKvTCaTaOxMVOpJYP/%2b2ISLr5lX3NYeRSyRQIGvpHTncc%2bYL10Db6QhUsWnB%2bAl4BthcFkvu/TMpzIEngz9Cn3npn5PK6Ws2sHcLA5DwJl%2bSDoccGtaH8JIJLnYTyJh7o%2bWVIqJXBHhR20tdL%2b920J/F6tY6534/cSGxN6LxfrQdIa4qsJJhWkSdB8DCZoSEOXjDbCIgs5ejtdatLrsLCdmFqSOK4FY8/bX6lpd4oSE7/ahvQe7mgAHxla6GlwIwJ/rx5OP7WgP%2bP3w%2b/34ywOXSc39CL6Hhqrpn/zWW//vmFXVKyNvoPZwh4auzhBU1QTrdG8Qo06uMjq3gHvfA85qsfV7MsmEm4ztPEOyGocF4u37wZUFJHohKndzVUOHxnDVFXmoLVQwexL0nhQw0w88/NDGL0rns6HqEeffcSVwP/%2bu6aDOiOQxL/3mplurK923tPTwite2kk97rI9pH8jyMZI0CyX1X2wdu9CwW6w6AQGbmM/sZPSzbujoihkoCbhRGFAEo2/kuGBoBnriHA6FIeBWMGmGyl/828FHQ73R1//0RJ20exzUlZUrvd8I2Brz/fs7i3wFFbMn11aULJnmKqTXyMpJC2e/vB9jvnotvKkmVFVUAIkxwATG%2btg6soMm6Qmx3IkeSxhLb75WURfdkqZ4iVm3/kwfHmLVXYqJixUgnTDg9DDx0iy%2bI0zvdyAV1U46NZXeCqxFj2sCZKTiOrw%2b9R31FehetA7Zh8GDDoaIxvuAfjJhiBdrQvHEMtJLgQ1aEmTTar0FmKy%2bDgUMKZ2J7QkUpdKGSN6zNwq4VREbfzFDJE6OUhxZOUC3BqTrge4QsLkDddPzjOPPb2sNFRlHDm3Yk2o/tP1Qy0WXlndNqgw0rFmzpT3gr4J053i/vXp0brfgumdvrlo898ascbnLDx1MoC2qw%2b82RD%2blf3RnEbtOSap0j8WT5ps0MfDRuAq/V0c8aWrkrdvS7NcE/CNmKgkp0UgDT9%2bT5p3u/WivgagPuOnjeajyMiyaCp0MHeoB9X9uf%2bEjB/dJmefo7JFn9qwlcD%2bz8RwRe8vQtJdQIuozG3rR2hNDQfA9fNppZMqk8yyijgC9nXxKHYpYv8yOJcY7kgsa9PCmgTKA8fkpeFUPHMVeGGmO7rghxsVAjgPTJjLecBz43l2v/2vrvrqHdq%2b9RTJvI6JnjYxGEkBv2N1SlNDiJd7CyWNq5o8ruXBuzsIJBSwrnnaMKfK7pldOyMLscpNJE1CWqvjqptyF/iXjAEsZQs7C7ew1DjhdpBm3tOWCWTZfX5lLhUfTwRkX8jPaxO12mBpzC5xTspy90HcJG6hn3Ex%2bv7lNH/ruq9lufhWPa/BagN4uISPuybgGvy9jW2sXtL44rMW8Z7aBtktQG2mdjLYRYBebWEBGS%2bri7ykaBywbvngG859OcaQ0GjrMhECuc/jcDD6fAo/TnH3gLibaEWPA1gMck4uBNTuB/Emo2/z8kX1urefQa/uc7Xs3NbZEug4fn1ST95a0gB0Z99tQtfJrP9n64TcPeS6vuHLKbbE2HUeOmrKZoE%2bHyhTEkic6NQF4UyZzYoqZwHzAk0YsTR3UHANs2Yx9TuIeCQPeHCDVC6QNAz1dOqZOyUbNEhcK3Qafm1TY1HlMr%2bd83/r7tz378vr9P177%2bI3ymTZUHeM8OK4E7ufBRTydUyDQ/tpDH713Qmnux3Yf1rC/PoKDLTH4AypyPGbJ6IGUtIbBRXIqOcsIVi1jod/sb0jD3vdnDgQoCTVl6dkV8rLQkRf0IjcYgBZ0iCRU8men7bOzHMjJAcZloX71I5vukVOLp3Nl5br9I0B69H37W4pierokt3jimMm1lSUXTooXVpaXzC4vzh6fn%2bPwU1%2bvHSt0XEUZ0lUc7WVwEbq2VSIGVWa05SKmjMVmySm1muRdiscBFyFUCwjT5h6vBZZtupuZzByB/4D35BaHYhYtzoAs/4m/haMWYKDD0/1JN0smfW59T8g3ywfQfsRnBMgKAJGYCTqoPZnSGdqP/WJit9m%2bj22gLrC5JTGIxkzwbye7CtBv3/wK3cPm7EOMFD12cRvL%2b5V%2bp%2bI1gqWnEFkHop%2bJyU8x2rJCAAAgAElEQVSnDWiaItqnGRwkzwl4HcJditw%2bsix9/TMHBYGJpoM9nQGndvzwkZbtm/cZ7WOyknVrnt56ZMrkyjbJzsuxwI4A2UUauUvumLh0wm3tXRyhjhga2ziKinXxIpn5sIumVFE3pG9RgK4OBfkF4g43vdxJJhYG/Jb7TDRsEvG%2bLCBGDjUA0ikDsWQaZbVFmFBqYPoYxoP0qpAPzB3D6577zfZn//3Wud%2bQV0lG4P1GQAL39xu5Ebgdado/ftXE62ZWem95%2b1C0oqlNw9tHY2AuBTmWewU9lPtAQWYSqiAiKAc/QwNjDWaZpB%2bNhZmSGnKQoS113YDP5YXHaSAvO4igK40uh8sE7RwgJjEyAa2Xc/7ixreO7v/Yp15%2bunXXP%2b8agWGWTR6CCJhOLlE01HcWXf3xBWMnj0W50%2bnE0utnLXrz%2bcPIzR9TeuFCX7DjGApLS%2bGPH0UR3DTdbQi/ZyLGuVuBU9NMPXk63ee4QhjZ6WIC%2bBLodnod4kHuSWl97Dd9TzkZAlhbQFrgfotdJwBNQJoW%2bi6bAOkJ2biYeu%2biAjCWY4WlrhHr023YEwZygqf%2bzAx55n7sn%2b3tM9cjqUquBUD6X7KeCJCT0WbxLjKAtV4fE28PC9YThRLQCdjb7adhI%2blywEhqAtTT%2baZS5siRSgFO8semxHUVSCbJ/tWsVEmuILRLSr7VySnH4Eg6ndA7gawy1CtetO/apYUrSx3wF/Hmpx7b0urzsUMHj%2bhNBORd/gCqyvIkmB%2bCe3K4HJIKNc2%2b5uqvjLm%2bbPm%2b59JlBN7b4xxBLz3P3mURSdpWsqqle09pFnCn%2b7S/Nl7cJObLcU%2bzBi1HReHYHCyqZlhaynC0F6gPcv4v5dj7ne%2b8dvuDd130zHCJkWzHyIqABO4j63q979YSaL/91pnXBRm/pandqCAHmebOuLCsoIqoNtNuEnnmA7U/SB8I0BNIz/KYbIQJ0gG/5SBD35E/Ozlu%2bF0u5NHUuC%2bALHcanQ6XsNMgwE7FL%2bYVou3h55t3vfjagdUHD4W2SCu5932pR8WGdvLoldfWFna3dmPWZF/lgeZEZTLJJ5TWzCyOtiilVyzxjNea9KoxFSqKcoFeJxMgkZONS0KDQzDolKRmstGkKxeJ0dZsOQF0WoiD8yQ0eG2ZikXE070i7hdbr26hbXH3cJPtPtWSCdqt533frFVHD5Cfc4IMtAfpUw3W9H17D1CQYx6Nfs8E/pn7t4F8ptqG/t7dC%2bRnn/zyMBAu6Q2bLx29ESA7YH72bxeBeWLzCRQREKdjKSQ1ICAUPSG7oeI39B0pgmg90udTEqFIIEyYWuRE2tTb03Wj3AEtba7jcaugEvV%2bl4KEl6FF51AOAusY2oO9aN/f0LIvN9lwyOvz4sKFkw89%2bOiGpprJJQ1PPrnZSn4tksmvo2KkME%2byevF9l9fccMP/M/6TedV7/kIVViNC5iYSVjPjYHfmfhI0G6THkwpU1Zxxg87g82iIp60KrPZ%2bVCDWTS/7Grq5gtnjs7HoApVXeBgLpYD2cs7V3djIDr596zduni4LNI2ifnimTlUC9zMVyWG8n%2bpl9xc/%2bpsbbyWmvTPEK9Zv6TXlMX4VOW4TtLuE5WNcoBCPx5ynf4dn%2bwCsu233aFdHpe0ogTWSIHbSQErnCLjcKM33wOc2hK0cFVYitERa3GkTgUKGtsf/3rbra1/%2b81dbd31OsuzDuC8NddMEs95Wj7cbu2bOWb589pJprHDc9IWzn9uDMT%2b%2bHtMrik8MaVT3qzsJKDFd6M6pFDolfJLEhcC66iLhFuAhtxaLTSfm3Od3mImhxJ5bn1ZJgZOm1m3m3Gazu0JAnsVgZwLk/kD83WKYOSAPJFkbaNvMbejnth6gMAP429vYqpZTvRjQegRi6CUg88Uhc3v6e0cvUJB9ogDyqc7nHaDeYiOJkRQJggTure8I0NN3tsaewHqEAD0l6ybNXIJk0gT4JL0jeY35z5TgkEMIJfySxCbH40A6V0E6zZH2Az17gJ0R1L1Rn97XtumNjYffamhZfHF517636rds%2bovMnxnqe/pcHb/2kvsuz62%2b5MMTLhh7W5em4uAR0qZx%2bN0k4RRaL5BchtLEzZdCUzZDLjTid1tGk4H06Z7q7lDgyzn5bqV%2bGg0BqbCGaFDF1VfkYHaRgnwXkFCAseOAX/yo6bf1rz93h%2byD56oHnD/HkcD9/LmWA54Jado3/O6j904sy11ITPumnSEcaIkhSJp2Sx5DhY7MoSpj7l78ovS5StBvpHOnCqoJS%2bfel9Rm9SK7M1HRJVFMJmmgrMCH0nwvYh6X2J7cZBzERuY6MHMC4wXgW/7zgZ2vfPvW2VLzd573xfd7esVzH6xx%2b4tn33pzWU3ckTWhojAwZfa4rOleN0P1%2bBPOKuEIgTqSWZgFw2hxuJhgxwxiZN0OAdTdSU1oz23XFmKWSXMuur9VkMhmzG3JyKnaTpsNFmwPFoi/3zjRdu/VlrPxd9pnZwbj32UB/3c7j5NAPYF3EzeJf336epLUkMQmriHpdojvtbgmZDS0ZjKhC3s%2bsu0jFp7kNATWiZknL3vKxaFEWMrdcXlUYUlrl7RvTwFPre2sazt25Nk3DnnaN/3tpe2%2bvIKWplduksTBB%2bmAw3zbFSvvL27u8S2f%2btmPP9TRqkMLJ9Aa1REgxxnTbuakJZpQ4feIB%2bSAC7HtPreZ6xFPm9t7HTriugOJCDdnokM64gEF11yZg8kFnE8KqizlEVk1/MHbNvzriqWlz37hoxMl8z7M%2b85wap4E7sPpapzhtljFlX7LOZ%2b/40AahxujONoRQ9Crwk2iXlIGiDl7wwTksQg8PkpAjYFZ1JdtByealsG4059Jk/pO20dDgPPioBd5AYbsoAcOxtFLNdUtGUJejgMXjAPuf%2bbQI%2btePfJEQ1NUSmPO8LUfqbsjRn373qMzFy2/ePbHr8iuZoartLwoOP6SGh9NAxXZ59UTBSJxYtGpgqiJtlUnE/2ZmHTq1m4rUZTYdZrdsYE6ATzhzJLxMD6VrMXOAT0XoHukXrNTPUTshD46LwL2xOLbLxfv9uCxZTiUZEvAncYgAu0Wl4B4wnTCEd%2bRjMZpaudVhUFL6UgnSY9PkhuGpJVrSEx8PEmMPI15XHjPe9xOVFeZY9jLO2P1OpLtb%2byNHdu2s3vjxufXbQ9keVuqykqkPn6kdsxTtHvFqseKm4/pyyet/Pjd8QTKEimOhsNRFBRQ9vbJCauDOnWhhTe94anPu10mYE/qpqwm0m0gEuIoKw8gf7oDs8sYagtV8ADQncd5wyP1Tz%2bwes0vm3d88cVBHU%2buNOojIIH7edoF7vjllurbb50nNO07DqQr2juiONzG4WRJOJ2qxUiasphEIiJAucfnE2AmETdtKLwCxMdPsoKzwyWs2zIcZGy3irQoEuNHWa4OlyuAoCdtSWMMcIMj4HdixiQg2tb76O0/2frHjqboFukCcZ52wkGc1opVLxXv3n%2b0aNmHZ4%2bdUmqUhyOpCXOvnF88u5xN6elC4bF2oNSNKtJve10khyA2/QQ9Tnp0h0eBbjHqrqQmNOoiUdSWn1suLuROQsupQHpnRnLo6chbBnGao3qV/iy/zdCTnCdTm0/yItLZZy7vSJK1ZTYWcBd%2b85a7jS2vIUaeAH8qQSyqxcg7gaTGQNaUxMjT7J%2bW5mCqAk0nUE/fuzCtBvWvbcPhrGKtuapcxUP3b2ltbE%2bvf/HpHUemTM5vMwtDyUqvI71Dz736wZqsqgtXzbpx8sXdXax2/9s6oqFeZPmszI7TfVO3wDvFxeu0xid6qdQUqA4g1KFDcaZQWZyP0hoHJhVwXu5VmeEHVQav%2b%2btjR/a9%2buwbX5A2kSO9Z52b9kvgfm7ifE6PIiqizh5TedWCgju7Q3z%2b3zf3oiNKhVZS8DhMorEPsFs/k66vsTOC8jwiNhkSSdL/kbdy/%2bwd81Rsm7h4ynxI0lCV1nWEEz6MLUgjzx8UHridDi/pZsQKfr8TUycBxYy1feKODZ/taEhuWfu4rI54TjvHMDnYspUvFbe27caKFbMKNx1gVy%2ba5irMr1owe9EsZfzUAKoCQTNRMpY2ZS8qM%2bD1KabTi2F6oVMBIvp0JzShWSewbrPptlRGnK4lf6GkSnshkE4g0dZznyosp/v8HibhHdbNeLeHDv3NfmmyxxlbU9//pMgmU6xDQ5RlWUmEaTKiIeF1mEVyEmZhKvKat0E8zdIkdAXhMAF7JoC7phmi8BtTGLLHuNBNRZwPcDx7BHVtHS379r759sYib7xubLmvYe3ane3FRdUyuXVY97L3btzcq39Vk1W1ZNXl90y7fvPj6bKmYxGkDEZ%2bDfB7zDHmVBKZAfc%2bQGIrA%2bV5qaBE7J42A4ojifIx%2bZi52IWZuUzMAO11cv65Kuy96zvrb3/wrg9Jp5n3vnSjfg0J3M%2bzLkCa9pYXP3svgIXHw6zihfXd6Ima8hj7AWeeMofP4xM/NXVGUJnvR1Ro9AyQ27LfCcQSsT7g/g71HzOTxOzksrRuQOU6sv0elOZ5EfG6YRA7qnMwg4mEv4snUXfjbSu/veWzf7zrAjlAnWd9bzCnc8GKx4qbujzLV91cWXMMlRN%2bsKqgNh%2bosr1QonGgK2LAqXA4Sb5OEhgXA/3iJPtFy45F2C9aSaSUlGgC%2bsE5uQw06EmAPpird/bXGYidzzyq7X5DVpY09tgvY7bVJmkUSKpM2ndbWiP0xzFNgCeblSfwTn7btB7JZigBkYB9OskRjRtQHSaI9zlU%2bLwM8SDgjwOP16GuZd/hfZt3dG5887mX10yePa1NOmCd/X5xto4gNO8x3/Ipn7jhbtWplNXtCQtZizfIEPBQUSYnvJne7u/WkH7AnfTvqkLyG4i%2bFwuZfS7BdUwoy8KlS91YNIahpQcorgLWvMnxh8%2bvntm062syz%2bJsXfDzZL8SuJ8nF5JOI6O40sKmNqNiw7YI2nsjCPhUkdDltoA6gSGFcTR1RlGYkyUecB3hEPKDQfFzW28URT6C8GapOPqObB/75%2b6QDWQ0SZpRHTHNQGmODyU5HqiFHoR6NJEQSKNWwO/AtEmMb9gQWvfHNdtW//EHklU4j7rdu54KVSl9e0f9zAUfvmL2wtk5C5fWZNVeWu2vEtVFybmI7BlBtoLk%2bGIWOTIssK6QdtmyasylFIkMj3QxiWPNSGdKX2xNerelqT6VQ8poif/5dJ6ZDys7kTXTsz7zXPuAPH05gLzGnjFMpnTEDS5YVtqnTk40aZI4mP%2bonxEjT58el4LyfBU0jJI08H9eDiOhx9YeaWrZ/ptHju9K613bZXLryOtxpHk/sKN%2b5ozPfPEep9tV2x1n6OoKQTOI7GLwuGgQGuC8BA9lfd9fKmMlTffVPqD%2bZTnNaGkDXZ0aJi4uwPJZCgqydU7VWcunADue7NkYSB699Zs3z5LJqiOvK52zFkvgfs5CfXYPVL3iseKf3bno1otrK2/ZVhep6OjRsLcpBuZQkecliQHx6OYow1W/yZQrDB2hEAqCWWB6BIYaQGc4gkI/YCgBUI1CxQgL1j2cArI9JoAPuk3PdpLI9CQpIz8An5pCcX4QOd40WrnLqi7DhTzmokkMf3qj45G/PrPtiZaGhNS0n92uMKR7twshvX2ga%2bY371h2xZjinNljCoPjl87y%2bakcT0s7ijSanVEZfG6ajuaC3aSFADsll/pJpqADbvJRJztGsvkjnbrtk24VMMo8UUp%2bzLUsECWjPqRd4JwcfKBrTH2AdPOnAvN2w%2bxKsvYMJGnkqQuScw0luRLJIdh40smnGBI62VAypJKGAHKaoQjHLIM74AdHcDyrL2LAw883H2461rp9W727fePzf98%2bbVLFWzJ/55x0hw98EKqw%2bs/XzJm/Jmf292IR1MY7UmiojyKQzeAl4E45XVSMyWbfaRYnZbnIuHVRqImSUwnfC6BPyalJJsA6LbbJg5ByhchqWUPcxzD/glyU5QHVRZzHHSo6isDGrcdTicTeFz7/0Rn3feATkzs4LyMggft5clmfXFd39UcvnXpnSzefv3NvCK09ClJaTLjHKNyA2%2btDnIqZMKAzHEJBVhY6IxHkBwJgWgRtEfJmDkDRI%2bCOANpDERT6qFqk0lfyXFRE9dCAZYN2A%2bSEne/3wqPoKCvyI53jRaibIJoJ2udOAvxA/T99c91tLQ0yEfU86W7vOA2SwCy7amzhjHG%2bynqrEFLxpIWzp1Zi/EVVqArHKAeCI5kiL38OMhkiiQs5wRBzTnmjWYoJzkmrTgBeFEKy/dRhFvyxF9uGkfTQlLjav6DQ%2bRpneV4DR2AgNp7WtHMZ7E8b1AtG3mLZCcATWCc5jXCxIQ95w/ykWUYtaSW5JkzbyZQBxOKUzMqFhSAluXYVOdH8Ggf39659YpcjVM32HJo53v3y3gatcc2aHe2BoiqsfUDm8wzn/kvgfeW3PnP3AT9bvu/5dFnT8QjSOjMle0K1x04knlrAnfqd121mvROwp8XrNul5u1hTH3C3fkiGabwzEO7RMbs6F8XTVRT7GcoLOI/4GLbcn9w4a0qyhSWavy0LNA3nHjN0bZPAfehif8aO/PT6fVdPmDlxZblXuenV13tw4HgcAR%2bDy2n5IsMs7dwWM1CUk4WOUAQFWQEB3Au8Jruu6JTpxTNYdwa324dYIiHAfigJZLvNhx0B9xAxUoaOsjwfcoI%2b%2bF0aOp0eMM0AMwBfwIElE4EdR1JtP31o52d/f6fUtJ%2bxCz5MdkSOMK1t9Vh21fTCYGHpEu7PXjRvRs4UpQkLli40G0kJhDGqnqsbcNFEDAcUBxOe6iKxNKkJkE56dfokMC9MYywk3t8BJtOesb8eepiERTZjCCNg9wmSSBUNUITKBlGZrHwfiLcKQpHWncY8WxufcjuE/l2Pa%2bZn2oCWBpJcEcWhdJ2J2SJNZ0Ju4y9zYqyb48fb0H54y7ENJfzYoYNHe9cf3LN3i0xqHcLOMYhD11z2q5qCKZesKrmw6nqXVynbviMCVaEXNHK1siqm2oOQQm5EJlj3ZYB321WGUblgYt41k5nPtFam2W5ymtGYjpK8LORPd2LReIWTl0NVPmOdWZy/%2bKNjD7a9/twda2WRsEFcudG1igTuI/x6//DxPZ//xj9OWwrgY%2bs29%2bKt%2bjj8XgaPUxG2eV6PDzFi2sGFLpOkLzSEcNVk19tiQEHQ/Lk9ARQETFqTwD0x7uRIG0oxZLnNlwChaedmcaXJxX4U5HvRS35XVp34niRQnO1A9STGt%2b%2bMNnzma6/c2fjy1Q%2bP8DDL5veLQHHNvTUzly24akFt/kKlaPyUO5djum0J2trNhT6YKpWSx7riZPCpHL00Y%2bMA3CRJsJNMYYJ1ksYMZNNIACvXsgi02XVqyukaPsgLOHoi8F4vdPbfbZ18/8gQkBdjpeVWQ6w7VXalBMOUywGe0oRsxu0EUkmI2SPy7Cav%2bCgx8WkT6FEtDALxuW4OlgL%2bsK6r7n%2beO/DQ5jWvbJ86b%2bpbMql1ePZJsopk3DF7wb/840OHjwKdnSEBvrO9ZrIqjT42y059iCQzgo0npt2aCmSM9zHwPo8uqqsGcs3zpbGPJFdUuKm1hcFwcPiSHPM%2bko8JeZxPDKiMBQFnAef33fbGv7Y3Hnlo019ubB2e0ZKtGooISOA%2bFFE/Q8fMnXpvTWfd//kbgIrtdWFs3E%2b6zIRIoqK3e9PvmgtNe9%2bIAhOMO/QQdGcWVD0CXQ2IKeIuYuADxMRHkR/wizGoIxRFgd9kDMIJmuLTkO3ywevmKMl1I%2bZxi5GoJwEwzlGU7cSsSYyv3dz96J%2bf2fnEw9Le6gxd7aHdjVkY6fjMQG7ZmFWfLK%2bZW1t58VVzcsfZRZGOtZv6Ticj7S8XSaaKi8GjAIZ2wvWFmHWyQLMfYMS624C9KwTkZZ3QKNs2gJl5YSJ52tIySyeYoe0TI/3o1JdsXXx/KU1fEaioKZehfwTm6V%2bSJDUOU05DdezIL57kFGmSEKqK0MRr5AvPSX5jQAOx8QomVzixbX8SilOvb2oNHz7a1LZ99X%2b//ELNtCqphR9mnYkSVt/Ykvfpy/512X92d%2brQo3Ec7eAoKtAFSLdlMcS0kySGnqk2cI%2bmVYso4/C6TCQvZm90hlgvQ36eDnKcofIpRGykDAOhHo7S0gAuXu5GiU/nY50Ott/L%2baRy4MBDm/7F583e8OVPTJcJq8OsnwxVcyRwH6rIf8DjVi%2b7v/i/f3j5rZfOqfzu7sMaGo9F0dAeh9%2btCoszAu2aI4CAQxN2j4XZWWBaGLojC6oWEp80oKhaWMzhdSSAMT6GthgXjjJtMXKgBcpzfYjHE%2bKB1R3XEXR74HEaCHhccBf5YKQN9CbMacBAjgOLJzC%2bp46v%2b/nvX1x9rKFziywo8QEv9BBvTtr1KTMr5k%2bucpT/26cXLE4B2N3JFlfG9Srdr4KYJUowpYI2LgdHmpxhXKqQwjgTmkgwFVaNljtMpm2jDY4yZQsDgfVMgP5ebOoQh0sefgRFoP/Drz8DT5aTuVlAKGox8NYGtpSGWPiUxyFAPSW1phI6nE4mSBAC8eQVr6V1cENBVPjIU7EnIBzj5BVfn1%2bA9gMtfN/rz29%2bff/RRNOGdbuPVE2ubFsrCzwNi15EPu%2bTL7/%2bRyWT8pbvbUyj4UgMAT%2bBccrVsRLqSdPuMqzE1RMUg0hCTRFJRqQFg89jCNY9v1BDLOWAz6kjaShIRiBeAhMJKlCYQk1NIconqZhYqPMc3cFYMfCn3/E35mZvevilF%2bqfks/TYdE1hrwRErgP%2bSU4/QaQg8y3vlA992PLq%2b/bfVirON4awdtHY%2bAuFfluyzvGYts9Hi/imiLKf7f3hlAcAHQ1C%2b29YRQHzMpJhjNgJq1ayarUou5IFF4HJeOYXaQnYcDBdZTm%2bOH3%2b%2bBmCTQ7fMIvjQwjg24VM6oV7HsrVv%2b7J7fcduzQcQnaT//SDostlq16qXjpxaWF0e5WZFeMW%2bLKzl40sSxnyvx8LCjKBzpDZvVJ8XJIkhgXhwcpJBS3kMLQd16vWQyJbPTshZh1G6yTH7ctgenPnEsZzLDoBqOqETZop9kc0sbTQt/Z4J36rVgn44kppDQglh2IxzXBuoc183cq5qSndaGFj%2bkK9KQuXLrMYk8cqsLgVFW4xim4/wnUzZ/Ws3XPpsOt%2b%2bo710%2bfUNKwbm1Du3SkGfoueOENf735mt9c89Wdj4ZrD3YSCicXNR2xNBX44tAzJTKZzbWAO33V5zIjtO72aMegkEY%2bYtVC4UA0YSDp51hwYS4qchRcOZbhcATgpcCHD/O1d/xp/Wo5gz30fWI4tEAC9%2bFwFU6zDZkOMq9vC6GT3trVBJyqInSZnDyHvV4c7YigINsvHjiqERWJp/ZCmnaNfueAw4gIxr3Iy6CrfnRHzAqqsUQc4QQTAC2RNBNRSwtMeUxvgqxADChcgT/XgfETgP0H9dZPXvNf/9R74OsvnuYpydWHSQSIYa8/cGDm5760/Ir88Qtmf2oxlmX7afaFo72LkrPI05rD5STrRgMOpwrmdiBbteQwnHyvTcDeX7Pe36aPHmGZunUbNA1kmTxMwiObcR5HoL8zDclobMeizL/ZYN4OBTHyougTMaeWM02YLCTpJTahC%2bck4j/IHz6hKUinTBBv6AZ0g4HR20C%2bA9MDwO%2bOo/2tdW0bOvZs/e30mqqGb94s5RFD3eU%2b9OXD/6Un%2bISCC8qvaTwWE1WcXQ5DXDeaSSSZzDt83i3gTv3GbdtDamYvsosZkrVkXKdkCBO8R3qBZFhH5bggsnIZZs1yYko2w9wJ0BvDXN1/OFn3nZUPfKL17S/JAk1D3SmG%2bPgSuA/xBTjdw5ODzIqLJn26rZt/bPveEPYejSPoJQcZW9dOe6TSSRxejxcxTRE6dWLaKSGVCi2Rb7tdcInW7gxHhcsMgfiuSBh5waDQuRd6IWQwDujIDvpQmqFpt%2bUxBdkO1ExkPAe84dPf3XLbw9I95nQv6ZCvT/r1bdsPFdVeedlVn/lI8RXTx2fXzB7rKqKGkXQlnqICNSeKI7lZCgnmhuJxII9cNugdjgoiUQEby77Rtm4cSIeeWdJ%2boJOX2vUh7xKjvgEDPRhtPbxZVu5ELkZPBMgJAJTUSmw7gXjhSkNJrXGtz1YyaphMvJHSkUoDaWLgk4aoiWFopiY%2b4FYxaayK5h7g5V7UHXx%2b87P1Lcb6fdsatsgExaHplitWPlacPyF/frh04fd8Rb7aHbsiSEU4AjnmdSZXIeoRJ1VYtYE7EWki1Yw83c2RjbaJhgA/Jd3bLIVVWZWqjccjHMkgsGBRLpaMV7jfYOziaug9nKuH17au/e%2bfPfPJTdJpZmg6wzA5qgTuw%2bRCDKYZNmgnB5n1b/Zi%2b8E4/D7TQYbe4kWBGhjweXxo6omiMOgXjACx7bS0xoAiC6AzPQRDJZ074OBRtMY48v0B8UDqjEZR7AeO9AAlAY9IRC3P8yDiJj%2b/E5p2Au21Exl/6Y2OR//3mZ1P/P4Hlz0zmPOQ6wyPCBC7frzHs/yHdy6%2buTDXT0WSqqhlvVEgFOOgsvD0ICHtumYYUN2qAOhBxSyOJKpKWl7rtF1moql4IewF8rJNVj3fkh9knrkE6MOjH8hWvHcE%2budW/F/2vgROiure%2btTSe/eszAww7KBsM%2bwDLogLIsYgShKTkChGg0Zf1Oh7GPMZNUTz9Gl8Ps3yacSEJyRqzIJLjCtuUcMiokLYBUS22ZnpvWu53/e/VXempuwZQLZRqn8xTHdXV1ffW3XvqXPP/xx6TmOuqMkQexBSMLJB5T7w3F0GoJAnAmxaQIWR1eFTJBg5S0rDtfC6FUqm2WmtiiyjvEhGLALslVH72iu1axe9WP/Sh8%2b98XzV2H51noxm/312OLeYOvuxil27dpSPnXvD8%2bkcKhN1KXzcwFBoj2v50lXTmgzFBusE6tP/bVsAACAASURBVFNZlTvJZDW6uwOS%2byzwzl1mbEQf8huor5chSToadQk1k4tx2mCwAkmRejKGKSMl4/4/7Hzm%2bT/942rvRu5w9vDna18ecP%2bc9NfND35Q9bPvVd9mAgO2fGLULFubQCqbQSRgLbyRnIWAExULEnDPGTIPWiL2nPh32orkMfSot8OWiHUvC8uoTUkcqPMCQiUC1Uxypp3ClSpLyJFGQbAijKaUlZRT6AOYLGNAlYyWdVj6wB9evt9LRP18nEjkvf7e6vXl18879dRxg4vKBk8YMKMMGJCri5e3ylEO1plBEhjGi0pVv9TGqMcUC6gHw5YzDLHrtEpD94L74kBRrJ2F7AyUe/r1z8d54h1lewt0VhDtLGYlGVipbVvaVtRKungH%2b07AnaQ0nI1XgRTp4VVLC89tJRVLSkMgnjzhSQdPsrOeYRUbthnoNVFe8dGqTzb5FbbpkWdqV%2b/aGF%2b59HEv1OlonavEvMdLxt582m1Dv/rh01pla0MKDWmGwrAOxiw/d1HSw5/RikuW6svaR0M6H/hbMpAkYqPUQDpnfZYkN1bRqoJkkwFDNlAUKcDIU/3oFWPoGVRwdhWMHWAbF9706k17d3qBhker77vb93jAvbv1SJ7joWLUr88YOOuWuZMe3FFnYv2WODbtSiESkrmunQB3MBjkyJsGibSucJ06yV/oPe7RnqCJxdK483RUW%2b/Ol315%2bBL5ndH/TOxLm8jkGPr2CKNHLAI/MtgTCEOmakPIiAVkDK%2bSkQFq7/jxq3N3eYmon4OzCCCGfcjI8ppBJ0b6aEV9Tjm3Z%2bUlUyYB5LtOjxTZ2lFhnWpA8SvcWz1qg3WyceQJpySJIZaddUwyFQ0gpiihV3cCeArFoUh6j2n/XJwu3kHaLUCTZGfn7qd08S2UQA2I4uuWeHtBqwDx3JXG9oYnB7As5Rpkdag2C5/jjjTgfvBkI0mAnhKwc34FWhODVIZtf3hs2V%2b2bI%2b/sf299SsrBlbhGS%2bV9aicrxTQNOyiby7qe2asbOvrWuXmjxOIBCmvwnKQaS895aS6jdItAE/WkWQjyc0j2960NgmplkUk17vb%2bQGtjSbShoHTakqhlDIMrZDYKE2WBo%2bTjN8/9M//2VGHNxbOP8Vb5T4qPd%2b9vsQD7t2rP/IejV2M%2btCmnUbfXbvi%2bGBbCgVhBT4f%2bbnQaGHy4sFwMISdjUn0KCqAQgWnaQk9Qgz1SQllYSsVlUth4gmUFkStBNWwtehLy7lxClfi63Yh9CtgKC7wIxMNoDnFIBsGf79XhR9DBwMfbjZqf3DFCz/c9ub5XrhSNz%2bHJs18umLDmg2jrrvpzHNumjthXsj2o97ZwJDNGggFJJgG4%2b4wSkBGiAqqCEwIG0cqONXbpTCCUXQWkZL%2btys5TGesZTdvOu/wvBawxlj74b7pzDeBusG8swmpkJWAGTcMsHCa5Q2f0bk2nnTw5A1P6ayZLHgeAkkuuC88L3iVEAkq6NVDwsvLWvHapqYlK9%2brW7b2tRXP167xihaPxuladeqvpp1%2b6RXfNE/3Xb7nDQ0btiUQC5lQVRnlAR/2pHKQFStFtx28OyG9dZT0fiYn8VUZB8bnHFrWtiDlOQAFEir6FuGkKgkTSiSMHAyDFndeeG7LY7fPf%2bvnO1dd5hWrHo2O70bf4QH3btQZ%2bQ7F1rXP39PEat5Z3Yr6hAlFyiJIbh5c2E6fMrlDDLHlPgpWUgu5U0w9paIWRCHpCQ7aiWkn95jSaBQNdvEp42aOFmhnzIDMTPQqiqB/ryBqDR%2baMiYkZrnHxIpVTBkssU2b2av3Lfasqbr5qYOK8Qurr/3%2buDnlFbGK0QMqL6kZ7oNGRXX7uLkwv0kL%2bBgUv8StGyOK5XwRDKmWM4wthaEpx11s2pUUpru3i3d8XgscrhbojI0XMhpxndBQ3cEX3pZL0HEIhpV84QnMUzor/WtmDWhZg6%2bCZbMkowFUnw3imcwNCfpXWL/kjTWpbf9Yufkvv773tUUDxg6u81JZD1cP59/P9%2b98Z0a036RZZn/p8vXL92FXwuROQZSo2jMQQG1W6wDc6eaLHiGfTXfYMppoUEc6S0swDvBO77WCJ/WSyiad0JGOSRg7sBCjR8kolhRMHg/jgxa2UV35yao55/Sfc2R/rbf37tYCHnDvbj3iOJ4Va3fcOmFEn2oduOiVt1uwtd6ET87xYlSLaRcbk5WHAabaUhg74o%2bAurCAbLJZdnKL6REiGyuui%2bkA2omxDygGevcII%2bn3QyLkZpJ2XgZJJaacIGHx0o8Xv/Tqlif3evKYbnnmkEPM2rU7ym%2bYd/ac6hHlU6aPLx5ABE5zAn1zWntYkqoy%2bP0S16yHieEz2wtOqUCugEobHA/S8JLvups3EimmHU7Hbtky3kF5LXD4W6Ar/TvJa4QnPBVqcwmNCHWiciN7/CXQJvzgecKmDeAJ0JMvPAF30ruTFp5YeGLdsxo9Jx2ktVrau4xkk6gjw5JHnt/6VqI18c4fH1%2b3xCtgPPx9LvZ42S0vzijpe/as5n7S5bu25LCrNgGfKrf5ttN2Tq07B%2b4BmqvJqUuGYmvfA36S0PgQDmjI6iSlsSuf7ZXRZAvdFBgoiRXghJP8GNqDsWlVipmWgElgDVfcvmyuJ5k5cv3cHffsAffu2CsARDGqBgzYtdeseeO9ONK5NJc1qKSSo0JSjt1NRIJhJDXwgYAGcZLCkOWjRAx7CiiNRfkkQQFL5WEqNrT4INqWPkd%2bwlSIGosEQYFN5TGGZjVo6yNkSLKM8aNklAHbZt/08nUNOzMrPVeD7nXiEGA/bWrvsqp%2bar9125P9SnsP/dr3zi2dmpYlaCmGVMrg2nSfnxL6AMVPPtKkilLhT%2btWwamtXycnC%2bG5LqLg6dc6pTFOUOIVnHavc8E7mmPfAg4Cld/sugtZyW1JPHgyq/1EONEQeOd/U0FrUIWZ1qFnDf6aSsCdGHiDElol7h9PMhufT0G6TMbWf%2bkrNu1s2hjftfUdiYXfembp9nqPgT/858TMuY9VqMX9Lx39k5OvW/0YFaumUZs2eUCTLMttMplkTgEx66Rv54w73ZzlSC9lnxnMBvSglRWyjXQQ8LTa0koroSZ0OYvqkRWorpZR4ZNQPRwGOXz987mPHvvtgtdu9CwiD38fd9c9esC9m/bMKyu23nrWhAFXfFJn9l3xYSt270txj1/S0dH1TiAqFAohnU7yYhemUnBSnAP2DiBdjnBP9nIKObX/LokWcNkMB%2b2miVyOoWdJED1LQ1AlBlMz0OIPgOkM0agPZWXA8CLU3f37937y1PO7lniTQPc6aajotO/Q0ppTv3zy1ycNjk4%2bqRLc1pESTrM5E5rG4A8whOUcMmoIMYVx0E4sOyWccltHG32LolN3oZWTWXf%2beq/QtHudC97RdI8WEBIaYtwFcBeBTuIIxU2xM52VJGnxtOUww6uPJCCV1KES2AuqHMjrlNLqk6DnDA7YNQ7iJSQTFIwmQ1IkDKhUsLeB4aG/bV2ycf3G342t7rP91ee9NNYjcXacee3WB876zwFfXfWEVrmvLoVWTUPAJ0GhzmHCacY6CzrUpIogVYeeSgB3cZy0CQH5eAv5NpsIZ0z0mlKC0waChQxFOmkUjBMBXDXvpQv37vEItSPRv91xnx5w74a98rNF711188VjHnx/s4bdu5PYvDeFWEhBLBZBOp22j9hacqOBnUA7ucnwYhgzibo0UBGWuG97aTTCC1XrUkBZNMpZ97KwhASFfphAxjRREgyhf68QvwEg2rUlGISkGVxOM2KwHy0xVvvXBe8t/ulVE27shs113B4SAfYBIwfUDBja5/L/urTvLFqFoZOiton068TMmfD7Ac0EIqrV34YOhMJW4alwiBH%2b6yJIRrDrAnB4QP24PcW8H/4ZW8AtoRGMuyjidkrOnNuSD7woWG0Db8S827aS9GY2bWnhSUbjVyXOxNNzqk%2bhDAbTJCkkOZfI6NtPRQQMi17cvXTxc5%2b8VLt%2b7aNrl15R%2bxl/lvexTlpgzn9v/23x%2bf2mN64yKndvSaA%2by1AYMcg3GTqAnkEf9mY66t4/tSvSNNqMO73Hk1U1hc/xpJ%2bh8br2EwO9%2b0Rx%2bnkBlKomCzNFOn0UjL1gG1/7zT%2b/cefVp671OumL3wIecO9GfUy2j/OvGTP%2bK2cPe2jdVr3v%2bm0p7G1OIBRQuHbOAmYWrAoGw8hkktYdvC%2bKxpZW7iZDwJyKT%2blBf3M9u0Kse6INuBdHC1HX2oqQQsWJQQwoNhEKR9Ci%2biFLJpqSJJ2RUdbfxzIFrG6YibXf%2bNZvvbS2bnKu0HlyydeHzaooLf/anOm9qwGUU/hWfTPZkpkclAckDTnZByWoIpDVuZZdhCZxyUsXlo4kgyGHGDdw99j1bnICeIfxuWyBziZbkchKQWU9HEFlIsyJfqwIdOKFrDYLm0vrSJDTjCJxJxoqZCXZDNlJUo4Ht5NkMtfHD%2brNv73u1XUt2%2b9a%2bMlf1r606vnaNZ4byeE6kabOXlDx9evn3rm%2bkE3fstqs3PxuC/xhCdGQNWrmtYl0f7kM5HQrc4Vu0Ggcb7t5s92H9pFFpK7h5AllqBwmo8xvsvNHKWaOZDarzMceem75k57e/XD1avfdjwfcu0nfkGXf3fNHXzllTL/zJUmqWfLqPuxuToPJEoooZImY9TbcbsIfCHP0ldZlNMfjKC%2b0LCCJbSfg3thK4UuWJEa4y9CAQLKZ0hC4V3skEEJxSEJRgQ%2bZUBDNaXKPMUE5rJEiFckS1M4MN//6J/%2b7YYl3J39sTxTSsCeSdbjo6zWzhg/texkVnSKNcjkE7G1i8KkmDJO1BSYRw05advpPFJ5SzLooOhWBSeKcIt9pAvRUQGfj%2brYf7PmvH9u%2b9779i9UC%2b5t06X26HoUOngC8YF2Fdp4YdkpjJR94ch9pzVnyGvIT1zIGFNXSv%2bdMCbpu%2bcEbBsOw/gpywLYnXty9VVKN3W%2btbn5ywQ/HeF7gh%2bEUGzblvuoRk8Z9KTxzyt2JjRooXXWfocGnKG0SGTKBc1m4t32zSFqlvqZwplCBzbpTQBP5u9vFqk17dSRjEiYNLETlcBlDCxSMGgljGFjDcy/uXnv7La/fsHXVxZ5F5GHo0%2b66i/2NId31uL9wxzXvgber7rn25Nv%2bvz3rSR9s1vq%2b%2bV4jJL8EvyIjErA8tO0bcW7dSAlrwUAIyZzMC5Z8RhymrwDkHtODilHpYSelUthSU7wVpQUFaGi1gLuJAAKqgdKCGFiRipakZftIfE6BX8aEagUhsBXPvb7hpz9fsHmVp2s/dqccSWKmTu1Vdv3ckf1uebz1mz%2b6eND0AX6U70tZIS1pCk7ymVD9MpkLgcwmKOWUWHh%2bGlDaaVBFhAzayQ7SBgVOBl0MBPRavvAk%2bpzHuB%2b7c8D75i9OC3RlISnGeA7ebQcawbwT604PGu/pQeA9LZJYJet5K5kUqBK0tM511sS%2btySZpYmnNFbS3ADY3ipv6zcQ9Xfd/683K4tbH136ZoNXwHqIp9jsHyyrWL36nfJRl1yxSAkHxzQ2GzBb06jLGigI2iNsZ4OobQ%2bpKNYGBNIF406S1bBPR1pX%2bU1aspnBkDQM71uMbCVwxhCZnTdSMespKMxgG5/56ds3LfrZad7N2CH2Z3f%2buAfcu0HvVE1dULHmlbm//Nhkp8sNZvkzb7Ugp2VRRujLLmBxyxYMw5LLtHl9UPGSpnAfd%2bYrQCMBdSpU5Q9L/94YJytIhro4Q2WPMIqjYcQCOlpVP1oyRM9KKPArCPWSkU0Av3no5fM/2di40rMUO3YnCZ0b3/xW1ayivpO%2bNrgnBk2vwkAqOpX0LJ%2bg6Y5OYgYycghR1S46JZcCkXRKhcyWWygH8MUFHd1hxDI9seq0TO%2b2e/QcY45d33vf/MVsgXwWks7X%2bFjtso8U2veCKCBcaIQDDQf7wkaS9PC2/t2nSjCyOnI5CWlylKIUZE3iCcmhoIohlTIHh4vfxdJda5f/%2bYmn1y5Z%2b4ynfz/Us65q0v3TRt9w9UIzaVY2piRs3ZZErEBCJECJdnn2zosaGPdzDwd0ZIlh72BLJCHg05HRVUSDBhobZW4goZcoGBQIo7zah4m9ZdSMgEEuvqte2fv6r371N0/aeqgd2Y0/7wH3btA5P1u4/KqbL625eeNHyb7rd%2bi8GLW8QOYOMk6mPZEFYkH7TpwkEJwht5feJMatHFMa2TdKUI0E93WndNSyMECsu8kkaNkWBJUw%2bleGkAr4OC3bkiVUBxQGZPjKVJzeC3VTr1v%2b36kddY8uf%2bYCr5DpGJwjpGMfNrJvzYwpQ66fM71iKo33iSSQzFo6dopSyil%2bq%2bCUMfhsW0cO2O3CUxGgRJO9eNiZSvyp06JOzCfOG0RPInMMOt77yuOyBZwuNOLapH9JMkP5CfxvFwPfSoWs9kVMDC1PYhUAnmwkQypYWoffZ8tn7ALWrCFzpynTsPQXQ/pY88ybDVj6zrNrVv/ywWWLald9z5NaHMKZOPGCP805/XdfvTOzC5Ub38xhy5YkelZYMlQneE9S8an9QjhAfu4E3q1/owFi2RUwsm9mQDhooqlJRrSYIdNKabsGJCmD2LDeOG%2b8hHKfhMl%2bhuEnoPbca5bfZ%2b6se3SpN38fQi923496wP0Y983ND6ys%2btm14/%2b%2ben2i78d7DexsTCLsVxDwyUSAtz3oBpzsG%2bkR8dmsqW2sTQmqdQkDZZSSCgbZjKM%2bJfPU1OZEAiXRKOpaEyj0m1wiM6hXASSWgxYKooUufgJxpozSfj4WLWd1z/5mxeIXXth6r8e0H/2Tw0o7nTBn/JjeU6aPKR5Ahad0FA0tBKmtwlPZL3F3mJjPYevodIohYscEnICdGLx8AUrU9/lY9Xys4NFvDe8bvRY4PlrAeRPNr3d7BYxeb7DZdzeQp%2bcE3uk6dxav8vw9m4XXMjqyARVmlvTwRNwY8KlAUwLcOlLLUgErSWgU9CoBggHU7cwgufixNX954pkV93oM/Gc7/2bOfqyi95DTLm2OVJ5VcII%2bffPGJBrTDIVhB%2btuM%2b38Gwicc393haev0qhMDDzN%2b8TCp3SVb0Y%2b8DlDQjpue/wndMSDEsafXIxTBoHJmiJNGwdjSy3w1/teunDLzsxKT%2bb62fqwO3/KA%2b7HsHfmP7Ku6qbLhs8KSOz2l5e1YE%2bTDM1McV07Z1IcDw7cyVeKOYC7/T5tKsNKTqWiVNKy80E%2b0Yoe0QI0JJPwwUTIH0JhSEJxgQ/pUBCKaaI5QwWpdBevQu6N2rMC%2bPiKn628Y%2bH8SZ5G7iieG1Nnv1JROTRW853zysYGBg6YUUZmPzrKaQlVlXSkDZl77vv8CiIOH3YC8mE7PIkDcJLFsHbQ7tSzC4DuBAnCn93Trx/Fzva%2bymsBRws4r8d8q1zifSeAp%2bua5giSvgnmXWjfxa55AWtK51aSQj5Dfxs5g8tn/D6SV1o2g1z/LltJyhFZQVMMK8YUSX974e2tq664edUnO9/8usfAH%2bRZ%2b5%2bLPqhavSx3Hjtj/GyjVRuzY1cczJS50wyNt%2bmspYfhaarOdDvZkra2s%2b4E2i3AH/BZIYtUdJxLSjAMA5pmoKKqB8YPlVAYMNgFY1SToMKev%2b15LNQr/cRZNYP/fpCH7m3ezVvAA%2b7HsIP%2b8Pzq82ZPHz1/006jZsXaBJLZNAI%2bBfze2qlxs59a6ahAyG8BNH6jzv%2bfPHujaEq2ojwaRUOiFcUUskRayWQSAbqZZ1Yyap%2byMGTTRIvfj5aUCUmSUeiXcfooGU%2b9jqUfbV29%2bpa54z2/9qN4XlgBSuU1QweET7/p6pPmRIFyEZ5E9m5k7UiyKNMkOVSQs%2b0csEdVyzXG1q8TYKcAF7GkbpUaW%2bwd2TuKucG9LO/p2I9iZ3tf5bWAqwW6uh6doD7fZC2udWf6qti9O4WVxoJsyEphJfDu8wGZjMRzHsh5Jp6yUpX9RSEOHOv2sW2vb977VrD543eeWOLp3z/LifvAog%2bq3q0rvCE0qPflmzZm0EjhWSoQDZhIZix/GQLu9HeEmHZb606vk2Qmo8ttqbr0mmGQVt7kwJ1Yd%2bpTchfKRiScd24JegQY%2bgUUVFfDePZfbONPq6QnTjr7kYeXe979n6X7uu1nPOB%2bjLrm%2bWUfnXdi1YDZxZAufo2z7UlEggpUpaNEpm0Qdkhl2q5kYt/9wu7DREOGoUeU5DFJFEcpSTXJB%2bUivwG/EkJBLIjyGEOjGoSk62CMmH0ZgwfIYFls27BuwzV33f/%2bKk8ic/ROisIT7p92369nXTLihH6TJ/XHQM1gaNxnQlXJwo2cYhTkDMslhoC7KDq1BnELjHNZDFUluR5OvXo%2bbbsH2I9eP3vf5LVAZy3QmSxNvE4sPCWw0g14WREgWHnBwAsdvHCfEfIZAvMCvIsbAM7WpnTkSFqX0bl9JIF4XQeypszDnMg6Mpk2UBjzYVClxSA98vzWxW%2b8tefJLf/6xDMrOMhTediUX1bXXHPl8/FWVLbWp7CjnqGgCLxYldew0eDMZTJym75dSBipGLW%2bQUaU/P3JdEA1kMqpkGTG%2b5b6k1Zi63YyDOwXReFIH0b3lDEmxFA2UjbWtrCN8Wff%2b%2bW8ORMeOsjD9jbvxi3gAfdj0DnF1b%2bpfvPFuT8c2VO6eNn7LVi5KQ1JleBTZESD7daP7kPjwRvk8ZqzfX0JvAGI%2bqzPhIJB7GxKoV%2bPMHY0pVAWAhqSBipLQyiMRBH1aWj0BQFNh2FKiEV96FEMDO6BujnzXv7uJ1s8B5mjdTpUVC%2bsvuoH4%2bbMnDp0ztj%2bfq5jtxJPCbSD%2b7GzTBoBfxB%2bKjKjlVL7PypIpQd3i4EF2ptagZICy%2bpR%2bLGLiZ0m/BJHsIuYFGgfnkTmaPW49z1eCxx4C4iJOd8E7X7NeYMuGHiRgkwgnj9s3TuBPfJ7JwkN/Uv6d2R1GJppe78DvHg1ZyCZkThZQBaSfStU%2bCKoe/CJj/60dnPTC4s8KeWBdyaAiV/605zBs2feqRhm5e49aexuNFFWLnG3r7aHbQlJTHv7Q%2bL9ESI7SHKboTHbfluyzWfo33izCSYxNGgMNZOLMWWwxKZXKyZtKoNtPGvkL65vWn/9ywd10N7G3bYFPOB%2bDLrmzTW7F08e2XPohh1Gzar1CdS3pNusH9vTUfMfGAfvMpDKWQVIAnyRdCLqtwpYo36GRIZBlU2EfCFUlEUgmTmkQ2TgbvALPxLx8aKm0b1Qd9ejy3/y7JJtSzym/cifDH3G/776%2bnlVp37t3NGn9itkpwPoW9vMwGzATiy7P6hA0xkiMjho58y6QwPJ/X3Jqz0CONMV3Ufv1MQ6JZSCwRPnjttq1LkfD9gf%2bXPC%2bwavBdwt4JTPiOtT/Otk3kXSqruIVdS2uPcrilhJ805ONNmUDo3kMzmdBzepqsRDnXI6oFH6qm4ikeLTBqJBHwb2RV3OxPYnXvtk449%2b9OrPa1d56asHcvbOnL2gYvw13320VkXV7jVa5b/WxxErlBH2k19v%2bx54CJNkaeDJBY76ictnWoFIoTUPBFTrfXrkNIl7u2fjgKaRa00W0eE9MXG4hOExCdUjYQxnrOG5pbVrf/mr177tzfEH0lvdfxsPuB/lPrr5wQ%2bqfva96t9t1tG/cUOufNWGBi6RoaIhKknhijaXvt19iMS4FwYt8C4eHLgHrNdoHCCfdwMh9IkZKC7wI03pO5Z3IB8QqKBx8hDUyRK29xr967m1a671io%2bO8Lkwf9G6KlVrmbwn0OeUqy6onD4ygvKGFhOZLOPLnf4AEJI0pKUgYgrjMqegDdzb%2bpn%2bMC3QLtg1%2bpfClij11OnHLi5ud6CS83VaehcPJ6D3ilaP8Mng7d5rgS5awD0xC3kMfUTIXgR46%2bBAY7vRiF0LGY0YKwRwp/dFgJNPAuLMqp/iyatpA6ofyGWBDJPBdAP1TQYKoir0gB99fQy7wljx9B%2bXL9Rz6lvPv7nbC286gLP5Kze%2b/cPiL508O7XHGLNxcwt0JqPQLlQVHydXuKwuc5eZgF9HJqtCUpgVvLQPCMXyA3ci85KtROrpKInFcMJEP4aUMDbCYFKfEgVbK7Huw0f%2b%2bY35V5%2b69gAO1dukm7eAB9yPcge9smLrrWdNGHD7B5s1vL8xhZxBBamSHaZExUJpyDzf2nqQdzsBcueD3iaATv9y8tUB2mk7zTAgMxO9iyKo6BHEPsUHiYN2E005GUVBGScOlLF5F5ZuXLv%2bz9d%2bbaSnfzuC58Gk2U9X9O1TUjNr1qnXf3MSppLcSZckpFqzyBgKGC88BUKyBl8wyAvF6DndXBHTJQgZwbo7QbvzsN2a9XwXt5NBz7fk3j6B5LeJPILN5O3aawGvBfK0gPs6tQpHLd27%2b/p3Xr8E2ksKO/q/O6aWNv07yWfSSR1E7pL3OxWv6jmDu85Q8WowIGNfwkAixWDoJvw%2bFaGwgiGVCv7v682L//H8yidPOXnw9h98ZYgHCrs4g6fOfqyisE%2bfS/v82%2bTrdrysVa5dl0B5hYkc93K35nGSvYgHJZsTi8cLVEkD38o46075HCEfQ8Ygos9%2b0OpJglSwJp//B1QW4rQz/FD9JhuWlaXqMZLxvwvxzEtPP3L1ci9k63M/znjA/Sh14aTZr1ScdlKo7J5rT1mzcn0OO3ansaMxgeIwse0UwWAtfykuxt2pRxaHSoMvSWK4xys5zJC3Ny9uAVpyBsqjIfhlA73LwkiRewzF5jFyDJCgKgomj1Fw64I9S04o2vvSvNnjPNB%2bBM%2bBimG/rL7yupPn/OjKcfNCtARtkA6dwYc0NPj5ykggrEKjAlSVwR9w6Nlt0M6Bu0PPLtgzetmpYyfnGGfyqZNpF5M9MezudFQnmyeW48V550lljuDJ4e3aa4HP0ALOSVtIasTKmfPaFumrQjbT5kBje7%2b7E1g5ky%2bKV0Mq18toGROqjxJXAQ0y4nEqxl9JlQAAIABJREFUXiUAL0FRZQwa7EMGbNsLr9Ruveb7f7i7ZfM8T0fdRZ9SoerYmnFfGnjtyXe/%2b6yGrR8lUFQi8ZuoTz1Mic/t5OMullmyuoXsiV0XHwnZAencZYaCt7K0imvgpPN6oGehhLG9JExiDKUDJWPBwmXX3H//h2/XrvECtj7DpddtPuIB96PUFfMeeLvq2mtP/i3qzYn/WB1HSzKNkM8qSOVBS4JWzXMBu8G7AO70ethn/YCURkWrJhQY6FMaRkAJIBY0UUsOMqYBib6ESRg8zsdGyGzl/F/%2b87vLlzXUL33cS0Y9EqcAFZ9%2b/wfj5pw/a9SU0cVsIjHsDfVpGAhANwzux6sEFJgGQ4wCbHVwD%2bVQ2NK0Ox/EtBPLTo98oF2AbaeO3Vn/QJ9zPu%2bMdRev0ynoSWWOxFnh7dNrgUNrga6KVZ034O5voWtbTC2iLkb865TPcBcaIhhSehv77lMly21GAzJkPaszTjSQNSEVr8qKjJGDVLz2QWrbvz5u%2bvtjv3vxDo/V7byf5z/4WtVG7fR7UWpM55IZQ%2barG2QHmcpYnu2CeeepqeQeQ3N8nCFqp%2biS5p0eIXounGloO1syk42byEYZJpxcjKrewFkhGdHhkrFaZxtPWLv9iRvnL3vY07sf2rV4LD/tAfej0PovLfvovLE1g8aXmOz2F95pwdbaNCJBB2jv4hiog%2bJZoCDQju1Ji0hAnR4CuCezJjTTRO/SMPy%2bIGKkjwuH0ZIi0G6iwC%2bDhVUMGIza9a9vuPzCs0Z4oQxHoO8nzXy64qLZ/WdNO2f0ZdXFrBcVn9IEmcox%2bBSAaUlocghqQEJMZm0e7MGwxbQL0O4sRhWBSsI5xll06ta5ip%2bUj22npfX9WUAK/SztZ3/bHoHm83bptYDXAvuZD/IBdOdELjTv4hoWuxPAXdz85wPutG1bcJNkg3g7eVVRJC6hIder5qQMM2dwKScBe2Lgh/bxwRdgdX9bLa3Zsmn1n%2b97cN3bO9%2b82KudcvXn1NkLKr525qiaNWfVPLT7Va0y0ZBCXZbBJxO7bq28k9Y947SHlG0nOSe7Qvt1sjX0XID3ZqpxM1AaK0DBCAWnDZbZkKws9ZogGewV9vryxg///O%2bzx3ir7Z/T0cYD7ke446pmPlbx2C%2b%2bemVVP7l6V7100d/eiSNrZFBGliG8crxrSz6emEo6d7KJtJnTRM4qJOLAPQAk0lScqINJEfSJmSgs9MPUDOixMPalDciQEQvIqBopY93alhU/vvX5md7d9uHveApSuvGaqvFv7C355i1f7n1JWTFJWRiyOWu5OSiTd74Jww5ScmrZdcMGyvZATAy78GPuzDlGFKLSLxEXsvO1fL9QjPudSWDE0juBfPeccPhbzNuj1wJeCxxMC7gLU8V17wTrYjwQwWuCbSfNOw0UlLbqZN2F7l3INbhzmWLp3um1XNDSvZOMhhxntJyJgI/C/QCmMyTSDD6VHGgYlGgAmQzb9uaGvW9l9n78TiBS%2bNaN3xzhad/zgPce42c%2bOmhy2fRV7%2bbQ1NgKw1QQDVnzgEhVteZ4g4N4YtPFI%2bQzkNYcgnj7Db4Jucy0ksuMgWyhjEn9C1F2goxvFxpID1ONNzawjeUffbTqtwtW3ujhgIO5%2brrPth5wP8J9Me%2bBlVX3XDv%2bd8ksalZ%2b0IJ3t6ZREJIgKTIvPKQHFZ8KUE7sesx%2bbt9Acz27U/pOnSYGWQrf4cWoahhFQR29S4NIBYOQTYbmDLHtMmfbJ1TLqGvGilMm/%2bIWz8/18Hc6efP/x/WjTh0/bdJl0/tIE/elGMxMBrrs4xKYsKLxQKVQOMSXl2m5mWQxgmXnAUkGuEUnTar0oBRU599Cq%2boE526LOPqckyl3u1G4HWbE9qJFnAOCp28//OeJt0evBQ6lBdzAna7vCrtI1Xm9Cn27%2bC7nKp2bcRcEgVMyw/GfbRmZTulcPsNTOm323UfBTUQOGSTfo7A4cO073e0rRUFU9aTaK1Y3/6EVi5b8Zc29a73kzk91e9Wk%2b6dVf//qhQN6%2bipXb8ph194kX70IB22LSBuoE4i3wLvC9e7prAqD%2b0ZLbYFN9H5WszQ1PJhJBjItQCapIx2TMX5SEU4aKLNZMKTdI1VjAoArfvzWhX%2b467S/Hcr56H322LSAB9yPcLtv2N7w5Al9Sy5as1XD6%2b82QvZJ8KvEgLc7wjgLivIVBQppDAfsNprnHScBLcSoSwZKQyH0Ko3CLFDRnDa5i4xEVeqQUVLpY8OK2cpHHl/z5i2Xj77xCP/k4273lVP%2bPue3D5z8/WmjCicSK9XYSpabJpe9BBWNhyqFwkHLjdMgz3ZLy24b/fDn9BA6dtGATj27sHUTQF2Ac3EBOxl3KlJ1AnF3Map4T%2bjYnR3mgfXj7vT1fnA3bwH3JC1sW8VYQIffuA%2bg617cqNNnBAufD7Q7rWQFA09jlz2ttLWISF5tY98JuGd0aFmTA0Ri3nM5wOezgpvqG3XOvBMDX1rkR59yYNErdUuff23z/a%2b/9PHHtas86YzzdDvz%2b5seGPTlIVNSzcaYjZtaYJgyCiIGGM30YsmTwrMkSzpDM7oJxv3fxbzB92eHNylE29ANlwxkk5YDtCyZqM1JOPdLRZhQIWPCcBh%2bCVi%2bNrPxdzf8/qzl3k1VNx8BPn14HnA/gl1216L3rrrp4jEP/uO9OHY2mqhrTqNHTOF3wzxEx/UgvWBBEGjNdLSA5MWoDnkMv6MG0JIxEAtHEVN0xGIBRPwm6tUQJFO3XEiYjPJCFS9uQv2UHlt/%2be93rnh47TPfqj2CP/m42TVZPE6d0rtMkdilP71ywhwA5Rq5%2btCysawhmZXgCyqIqLYcivzziQ23XDkRibQHK3FZDC07M4tld0%2bqTgBPp00%2b3%2bZ8Ehk3YBeTudN9RnSYmPA94H7cnMLeD/2ctICQrzkzFzorPqef5C4%2bp23dzjJucsAtxxPPiY2n%2bYrmICcDT3pszr7nDBgU3CScZ5jMdfDkRU4kBSV0lxWrCJegbvkHzdsXPb3ljj94qattZx7p3ad95/I7NxVK05vW6JWbt8e5PTTN8YxJCPkt9J7OWcFMAb%2bBVFZFKGDm17cDyNqhTCR30iiYyTDR3GTgxBMLMfl0P0ogYexYGL0lYNHDK//nrTf23OuZVHxOBgP7MD3gfgT6a%2brspyvGnlRQds%2b1p98mSdJFT7/egr3NaRgyUBSQeViO%2b%2bFcAnW/TYw7AXeS1NC/YtucoSHkD6AkJCEUikAu9CGRM9GUNFAalGFAwdljFfbM63t/3yuWeuKsmsFeQeph6G/Ssl84a%2bCsf/vWxLKYTzo/B9TEbZbdDw2kgDINE%2bFQkC9pEush2JFwxGba7TRUoWWnwyKZDD2cQF1MuLT0XVrYcVImlk0kJ9LnHARNB59nIY8RrJxognwg3QPuh%2bEE8XbhtcBhbIHOJmk3856vfkXMFRy8twIltnWgk4UXY4sYa5zb0c9wSmlI406AkNsPJ3WoCpAw7QJV4Txjkn2kCZNAPHehsQLiqk/01SmMvfTsG1sev%2bv%2bVas8fbV1ksy55cUZRZVnzqovkC7fvT2BpgzjKxn0CFKyKrOAOz1IEpPKKgj5OlYgUeIqvUfoIEPpqwpDOkH9Yq3Mp%2bImWoIMX55WwoOZ%2bqaY9PVJKlu2kr368nurrp9/dY1Xh3AYr9kjvSsPuB%2bBFr75wberJlb36DfzlBOfe31FC9btTEGSJe7XTuA7H9tOl2VrHn07LV9SMSq9H7GDmCh8iSwFmRJG30LGw5uCUgZ1gQjiKXLbpe1llEUVnD1SxuybXj5/%2b87MyuWe9eMh9zaB9r5DS2tOOn3a9WefjOpRxVJ5Q4vBAbrql6Dr4PaOVnqtNZUSaCfAHo/r7Uy7jbTFuSD07ATyaelaSGOcBywm23zSF2LhS2yJjFunnu%2b5UybjgfVDPi28HXgtcERbYH8TtXPFzL0tPReadxpDiABwrr7Rgefbfz73GWLfRY0Vl9FQ8E9aR9bWvhs5so2UuG1kIGD5vscTZH8rQy4IoroXw11/xdKhBWvvm/%2br5avWemFA4C4z555Ukzlz5LOvv6Bhx%2b4WgKl8hYMDd4dVNOndQzZAd79OjLzBCGNoyJoKB%2b78RkuygplSmoFJY0pQNljBsGIJMwoZchWo/cPC5fOffXrbEu9G6ohewod15/sbDw7rlx0vO3tp2ZZbz5446PxNO42aF9%2bpRySoQGOWDCYf207tQuCcLB/p7pquUyGPoX/dnUTgLmNo6FMSRmE0DL%2bkoc4XQmtK4%2bl3lMMWCymYOEquffjhdxc/9/ct93oX5aGffVVTF1TMumjsvBsuGTevKESBJEDLPgOayRCSc/AHg2Am48WoTv2hkMYQQOZJqHk07R307K0WeKdHW8BSC9DD9vAVr4nJWkhnnADcLX0RtRNdtYIH4A/9HPH24LXAkWiBfHKZfN8jdO%2bCjRfbOK//zmpe2gKbWm3XMtfEw5/a8xGB9kxG5/MUl9GQnMZ2oEk35ThjrOlA1pTBdAP7EgyGRlp4GQNO9ONDxmrfWLh8/qZP/DsXzR9/3BdIEnjXiifffPplQ69bviyHhoZW6KaKgrDLdk62ei%2bdbXeU4YWpNiNvMAnRgG4B9zgQJjKHbq5aaIXERDoCjDupCFUVwLiIjBnDJTb9hj1PffW0xpf%2b7WvVnj3kkbh4j8A%2bPeB%2bmBv17sfXXHXjN0aetbOBXfTP1XHUx1McuNOSIi8EdzzEMiZ/yR4QW0jn7reSUYXlY1uqGsna%2bN2zgZA/hJ4FBhQ1jH0RP3ymiX1J8hSU0KdARUEvGZu3YN0v7vrtWV4YxqF1MrHsX/n6sFlFhbFTrvjy4EsId9c1MagKxUsDISWLtBTkyacE0gmcE8Pu7G8qVHUC9nyadjrKfAFLzqMXy9riNWeBGgf6dpEa/e2coPO5yYh9ePr2Qzs/vE97LXCkW8A9UefzcnebHNAxCTld7T5A5Di490VjhlM/n2%2b1z/37hAMNebqnUrq1yksMPIAcpT9ndS6XoRXILBEWWcZTo%2bl5JmMiGFJ5aBOAbff%2b8cN7bvI8xTnzXnzG118YOCA2ZvPHGnbsbIEOFQXkMmM/SBJDD0sWYz1SOVpflxD06/x5RlO5Hp57ulMSLtUpKICpm2htMdC7ZwSDTwqhppeMk0MMm0qBgs3NK%2bbf8aJnE32kL%2bTDtH8PuB%2bmhqTdFFcvrG768Du3Npjs9E3/ypW/u64BkbDC01FFxb74Omp4KkYlwE5MOzHu9Ij4bcRFGkKtfVmSv8kAnYrGTR2FsRB69gghGTeQiAagmAboZpyWykoqVZxahm33P/H%2bPfMuHufdRR9CH1dU/6b6j49Ov3DKmH7nA%2bhZtw99rbRAEwFJ4ysowWCAJ6CSP7vTMcYZoiTST0kvypdQaAWmi0JUoTflk6%2b9vO3Upeb72828u5k18byzhEWPcT%2bEE8X7qNcCR6EF8k3YzuvZDd7zMe2CjXfXyDjHFPopbs27sKal90jaF0%2bBE1LEuKfSFngXwJ0YeDOng6Qzmi4hrQN%2bvwxdMxBPMpB/Akln%2bgQZCouw7c7frv7Lc3/beNyvDE/80p/mTH30q3dmtqNy/fIcGprifJWijV%2bXGWfbhdadA3SAF61msqqduMo9aSynGZLLUB8RcQgTWpoSVSUU9CzGeWOBiSqDOko1TmKs4ZEn/zX/32d7rPtRuIwP%2bSs84H7ITdi%2bg6fe2HjezNNOmP/%2bZq3mk90p7GpOI%2bJXrApxx/fwi8pm2Amw86LTrLVNxNZH8%2bAlzRoUnZ1EFeISM9C7KIKSAh8yKYZEYRCyYXArqYhfRuFIubZpDdZ%2b57uP3lC76jIvue4z9vF/LlpXZWgtk6vPmHTZJH96YrA4hKYWBr9iIhxTIGczPK02REWotgaKJqSQ7RgjvpYXp9pAnV5zR467XWS6OtzOwLv7M4J5d2pZ3W4T9r1gh3PzMzaV9zGvBbwWOAot0NmE7ZbCie3yyejs6YcfLR8fXDI8oYHPJ99zpq0SMBRMOxFT5PdO81XOr3KiimwjfT4JRlZHOifBb1tGku6dPN/9qgQ9GOC693ueyS2dd0Hgvtt%2b8c6O5csa6o9Xl5Px5/2%2besjUc34%2b8MIeVRuWapU798ThUxgUuhOyB3Bi3UnnTgC%2bHbhbdpGS3A7aqR6B2HZuD8lxhIndtSWI%2bupRXhHBpGlhDAxLGDEcRu8Ea3jznR0vzf3SAHJI8x7dvAU84H6YOoj0z08t/saz/QpiNW98uA8bdqYRDkpQ5fbEMy6NkQAKWaILiQoTiW2nolSubycitq0WhS5AiW%2bfINkMLFsnlccYh1ESC6MprEJlFD%2btQWJkISXhaxP97Km3jd/X125859qvjfTY9s/Yv/MfWVdl5Fov/elVE%2bfRLmqbGYxsChqCKI5oXMduUKCSA7SLIlSnLIbL2c12j3ZnoFI%2b9xjaXDBdYkLtzMpN/DS3Dt5ZxCqcZJyOE%2bKi9yQyn/Hk8D7mtcAxagGn1t29oubUtZM0zhnMlG81jUC3e6xx/qx8Xu/EtHOLSHsQaZNxisAmkm6kSOABpClxNaNDUSVoGZ0DdfJ8p9ogI8e47p1WKgM%2bBaEefqQzbNv7u/W3Xnz6zSf/8LOzj1vd%2b8lf%2b/scX3n/8SVjhly3c28KOY0hGrIBubODiFHPSVAgIeDXOeNOQEEhVr4VIBkTB%2b3iMzZ4T2dNxJMmJpzTAxP7g/U3IJWOUoyzwBp6jbh/Wu2Gf/fIvmN0fR/o13rA/UBbqovtSAP95QsGzrrlskkPvvVeHOt3mkjrGRSHOkpkSBpTGLRkMVG/fQPtGFHjtlwm6mfw%2byPI5FIcsBPIb8mY8MsMxbEgwn4/ckVBNCcsBxketCTJ6FHqQ4sP9f6tG75z4VkjPOvHz9C3k2Y%2bXdF3aEnNl88aeP2l0yunJjMMcUpBzaWghsMISFn4/AFKBbRTTz/tHBMMcu1mB027E7DTe2JSdEpinKBdHLp7u85AOm3vZM7oqIT%2b3T1pu3XxnkTmM5wo3ke8FjgGLeCcsPOtoDkwGv9T3LjnW3lzAndOGjncZzrLkqBxjPZFMj%2bq03EejwDx5IYiSKospa76gLgG%2bH0S9JwOPSshTZaROasmiFYr0xmGUGkIw3sCqoRt/U//2/wdb56/6Bg0cbf4yqvueG1GQ9m4OzLFkTF7N7Rwb/ZomAye22A4P05i1bM5CYxSVG2Ne5ujDAcPDuDOP2DZc7buM9CzVxQnTQtgUFjCmBEwJv7/MoXbF%2b986u0X3rv6eF3x6BadfwAH4QH3A2ik/W3y51fXnXf6GcN%2btWuLNnDdthTiqTSCJJGRXBIZhx877ZOAfBuAt9l46pB4xta6Oxj6nGmiT0kAIX8QAWYiEQuihVxkeNG55SIzY5SMux9dfvVTSzxrp/31Wb73K6p/Wf2fP5954%2bXn9B0GoIZYdqZlOMvuDzBeWBWSM9w9Rkhj%2bIRHBaq2P7sA7E5NO02Iwu5RvC9cY5xg3QniRYGYk5V3H7PYPh/z5k5Ppc96FpCf5azwPuO1wOejBdyTufO50LOLscJZkCosIm1cx3%2bse5Wvq1C4DmFN5DJjY0v6l7vPEAOvWivHBN5zJKEhFj4LpJnMQ5ySWYZ0ykA47EfVYBWrP87VPffy%2bkVP/vHde9ceh8meM%2bc%2bVrF7F5s%2b9NKvP5pKMLTUJVGbZigIWT0oNO9pjXCGyQG8ePA/KXwpaWuhnOCdMAm50mVNpNIGas4txfAeQFlQwdgqGJMAXPbj1y9cdNeZx%2b2Kx%2bfhaveA%2byH20vxHPqj68WWjZqkybn/qtX3Y05wGkyQUhORPucjwIh4KUHK0utN5hF6nt0hCQ57tpHvnd8iG5SIzqAdZD0YQj/rQktRAGQ08Xa3IjzF9gYV/3rbkpb%2b%2berXnInNwnUqBWZVDS2pmzxxx6/Qxxb1goO/eFsb7ISiloZsmggEfdMNEkEC7SaFK7Ux7KGyFKoliVJGQWhD5tJ5dHFlnuvZ8spi2IrEWoKTw05rUNpvIThxl3MWo%2bWQz/Abk4JrN29prAa8FjnELdKV5dzpJie26Kkh1Mu7On%2bV2melK%2b06fE44z9LcTvFPaasKwCiVV2ZKBGpoBkhZSwWo8axWtqqqCgrCK/r1Qx3hg08bH71rw/qrljx9fqd9TZ99foRVPv7ly/IDr6AYnUZtCi0mhV45iVQfrLsh4AdzJDjJWAqRbLOZdPHj9Qc4qVq3LMZx3bgl6Rhi%2bNUmhjEg88ms8U1T44W0/njPaC2U6xtd3Z1/vAfdD7Jg/vvTheUNO7Du7yBe7%2bB/vxdGazcCvyhx4C1DOlw3tC4wDdxsk0fsCoAvQLg6H3GUoJZV7tusaepeEURwJcz%2btT3w%2b%2bE1KpiNveAVlURUTB6P2gpvW3ve3n4%2b65xB/0nH18UmzH6uYelKvMsUXuPQnV500jwauhlbGGQmaUAKUSitrHLQTWHdr2qkPwmGVbysegm3Pp2fvjLnqbHLMZ83mTFHNV4TmZuDdHeq2hvS07sfVKe/92C9QCwjNO1k90sO5qpbvZwr85naQ6ey58/V8pII7pInGPCKo%2bMNmekk6k6SUVdvn3UzpnCEmUE8A3iCf9zitXFrg3dAZAqoMKRrAjlq27bTh8YV3P/zekuXLjPqlj59d%2bwXqvi5/yuwfvFLx0fbm6YO/OvNOaGbl7j0ZxA2Te%2bS3u7jb7jFZiQc22c3ONyDgTpbSTjZefCGx7lrOhB6TMH5SIXoUANUFCk4bDuM9nW2Uln5w48OLdqzyJDPd82zzgPsh9AsVpK55Ze6VjLFr/vFua/nKj1KIhCQUBOS2oCVqYGH7SBeRkM%2bESeNuB/FwBp6q8ikh1U6mo8MiUGh5tgdREdPhU6JIFvg5207XKGMyevTwoS6HerW27sNHFiz/tnehHVyH3rVo%2bVXJ2OBTbr%2bg5JJ9KSCTSEODH35KuDUlhJWs5dUeCnJdO0lkRL91BtrFEcQi7XHhXS01dwrmHUFMbZNmC1BsBzFxhmwf0MOetOl7CYSL5wKgiwldTO5tg7erqTzG/eDOHW9rrwWOdQvsbwIXJJE4ThovnJ7tXQF458oc18O3AiV2MJwbxDtJCipeJQ08Me8cSJK/u0P3nkvqyBDZQfp3CVDJeSZnwKcC%2b9IKTF1HXYPFhIR7hDGkgtW9uQVrvjHjjrtbNv/k5WPd5kf7%2by/5VeMLvS8ortr4ol758Sf7uNzI56wKpiLVrMITU%2bmR1RUkE0DEnicIwPO2LAQyLUAwZoH9zD4gETfQrzKK6DAVpw6SWNhUJL03kP3L61ff9%2bDat2vXXOsVqh7tDj%2bA79vfdX8Auzh%2bN7n9kQ9%2b/qWLqqeEG/WJr7/XwAtESiIylxy0u8O0F%2boQQOfyF9uvXQyMxKzHSBqTsyKKhUVkc9qEQrqNojCKY2G0hFTE7XRUksgUhFRMGyVj0XMfLf7R/3lxcdPaa467Qe1Qzr6fPLzm57fNHTlHglRe22xyPbvfx6DJQYTkLAfommmBdmLb6T/hHCNkMYJpd4crOSdMOhdI4y4eXS0153svn6ymq%2bhyJwDvjH0XzJwH1g/lDPI%2b67VA920BNxtPR9q2Que0gLRv9vPZQopCdl7can/GDfbzse7cfSYJkFwwnm5XanAQT0CTdO9EUimW9t3ImdwuklxnyO89njKQSDGkUibCYR%2bqBvvwwna99tEFy%2bZu/1fTyuXPXHDcMO9Vpz40beys6d/Ue/W5fM%2b2BBoyjCeqtqlfOHB3MO7UWfRmZ4O7zcLnWinZ1oSm6SiKRHHaeWGML5EwYjCMlTrbGHpn16pvn9HXs4fshpe4B9w/Y6cQ2/7hy999FiZqXn23BWu2pxGihFTbbpXr1G1Pds46kPYvZ9s%2b2gDeHcpELDpfQpSA5oyJIp/Jte1FBX6ko0HIpomWjBW0JMsySkt9uP3XHy%2b5cHzjS/MunuBZPx5gX1JdQu%2bKyA/nfnnQGQzou7OewcglEItFoVGIlc4QVbOfAu1k60j9Spr2fNIYmqhEsJLbq10wUgTwqTC1M6u1/bHvbucY508WBWedpafStsLXmf4WzjMH2GzeZl4LeC3wOWoBIdEU1z0x7c56F%2bc44QT1ziJ5GiPcyaqiCfKx7qIIv4P00%2bVsQuw793wn60JiiINW0qqWMdosIzNMhmQYlqOXLsFkEgr7%2b1EZYnX/9dCKRbsbfW8suHX8cVNA%2bZUb3/5h%2bNSTZ%2b9Lm2N2b2ji/viEAbg6hiRIOVrOt3qG8EOy1SYIY0BANWFCQkazwD0PZaKbJnv7TNJAIihhzKQinNIf7EwmS2NGSUwBW9lr9IK5tWu%2b57Hu3ey694D7Z%2byQu3//3lU3fmvMze9v1vpu3J5CQzyDcMC6EohhpTweN3CnQCUKW6KH0Lo7V7z44Em%2b7VmyxNJRFovAL%2bsoCIXRGvFbLjLWpYloUMHJo%2bTaxY%2b9P99Qg2/d%2bM0RXiHJfvpy6txXKq6/pO/4cyefOF6S2PmygRoqQk1lAT%2bLIxiQ4Q/4wAyT%2b7QHHUw7gXaaxCiqm1xkbJUT/0anV7tYJs4H3AXrng%2b0037EpEf/7i%2bUqTP2SwByN0h3Smr2B9g9Fv4zDgrex7wWOMIt4Jyw93edim27muSd%2bxAyGjG2uIvau9K7u8e7NradyAwXcOcWxgQg7bRVUbRKTjMZh997lslguoHWNIOpMV6U6e8ZQDrOVqCIbXzwf95/8ngB71fMf21GyaAps3YoJmfdE4a1QkEgPZ2TeRAT9WXYbyCtW6GPfG6iecuQEAgQdKcVZAnppOXxzolDWlXW6HUNleWFOO0MP0bJBqaMVlmasbpHF36w%2bOa5Y288wqe1t/uDbAEPuB9kg9HmxLZfd/2ZP5/75UGX/OODHP61tQmyYoUtCeCUj3EXSagcoNvaP/fX08XUnDYQ9ofRt5BBlhRopRE0x3PcRUaiWCaydUeUAAAgAElEQVRZxtgJCl57vnFd457d3/jxXK/6%2b0C6sWLYf1Xf%2br833lhkSpO/dRIG7qlLg5k6TDmKQJDqCYCwkrHDlYBIJNCmaec3YmHVkkA5ULsA7eKGTUyEThDeWVLqvlagqGD/SapducqI3%2b2cbJ2ad/E%2bX%2bq2l8QPRAe/P3B/IO3tbeO1gNcCh7cF6Dp2F5d/ag5xvODe3jkOOG/y6e%2bODuHtO9lfWnM%2bqQwHhXZatNNlRuyV13I501ZDKqholYc1pXVLNpOVkCG/d82SKDY269ALwyjrIaFIZdsefHTFX156Yc29x4OL2tTZCyoGDznz0ty4QXfv3qWjobEFPgXcCINCmKjvAn5r9snq1nMO3O1/CbyHAiZyTGq3ibRxCGGVTMpEPMBw7tklGFsho3o4DAIp0W1s41U3/Pas46GND%2b%2bVemT35gH3g2xfsg4s7hOsueeGqc9%2bvCuJXfUkX0nDpypcpy482J0adzEopvXOATsH82TTZJjI6AZ6FYVRFAsDOR07fD6opsklMgTaIwEFCLPa73z5nkuaNv/Y07UfQB9%2be/6aGZdc0OfWc0YXTiR/9oxdCByRk8jKYUSULAfsBMpD4fZCVNMAwhELsDuZdqemnSYmGjJJzyken2KgEtY2TkBP23YG6uk9t4e7%2b3lnrLtT195Z5Lmzydw6%2bHzOFE5m7mBYvwPoGm8TrwW8FjjAFjiQa8%2bpbRcadefuxT5qXYWqbsadPpOPZafXu5LJiHRVHtJkp6y6V5bFnEjMO2eNkzqXcdB/FNZE7LuetYE8Z4RlJJMGUkmDT5SSqmDMCT7cumjrEp%2bevG3%2bcUBe/ecjK6teXF72X/2mV35596YkkloOGlN5YnrIbyBFyalgUCjcxXEjJsB7yGegqVmx7DgB6MTQFwCZVpr3TOQ0A2UjemD8cAlDoxJGjYTRH8Djv191zbw5nhT3AC/Ro7KZB9wPspnnP7iy6psXnHiTyiIXv/5eHKlsGkHVWpqylqrabSD5rm3EQ3oyksdQYY670p%2bDdnKfydHdsokeYT8G9IxC0wyko5aLjMy9JWXu2X7aUNT%2b5pH3Fr/22r57jyd7rIPsKr45JaH2HlpSM/%2b6mt9WV/rLCbRnMwmovigUH0NI0ZBRAlDTKQTCobZEVF6MaoN2p0c77ZMGwlio3TWBXiMHmc7kMTxtULKAvXMb8Xv2J5FxT5LutFXnBCuWtzuwZC5/93ysm3OCF%2benYOtIG%2bsE9%2bLzFPK0v%2bX6z9Jn3me8FvBaoGMq6f6us3wTufs1GhvIWcq54pYP0LsBOycRHG5WHYLibOerzmp6RJGq81jcIJ57vRN4T%2buUmopM0GLfVWLfMwaXdSgU4JSWkSA9dpICh0ivLWP0CX48vsZcvHfdmnfmzR7zha7zmjn36Yr1778/asJ/3PxSY6OB2nQWcqsOconmD54DY3JXmXzAnb/GdUr29gKbUJtToWpaRyokYdykYpw8CGwgg3RitWKYYBu/N%2b0XZy1fev1xUxDc3ccfD7gfRA/1Gf/76rnXDDv1tkvHPfjqyjg270ryAURIZBw4Pe9eRfEpd40hgO/YSrDtSd3A4B4RBAMBxMO29SMx7cTWBlXokoILRksreg6/e27thh95RSNd9B8VocpSavItl026nJJQP6knZxiTLzFSsJIa8HFwblDAklPPTvdbnHnvGKzk/CqnXIb3u70sLCLB3ew6MU9iwBQuM50B/Xz69q6cZcSNn7spBHgX55mzMNXNurmBuRsoCGDvBP2enOYgBg9vU68FDrIFnMy5mFs6A/BiW6fVo1Mm09VXi/qXrqwhBXB3y/Y4qO8CvDtJCVqZJIKjM%2bkMDyikolUJIN173AR8ioRs2oDqA/QcYEgy4kmDO3ylUwyqT8GoE3x1GYbt9/1u9ZvPvbbz3uWPf3EdZ2bOXlARmnjBo4WVZdN31GXR0NjK24huYtI5BYpkthepOjpdsO5cQiMDyRbbLpLesGVLqVYTrY0GBpxShvHDgB5Bk1XrslQzTjIeXrjsmlhx2Vs/%2bMoQr5buIK/jI7G5B9wPolXve3zNVVddNOLUnXvYxcs%2bjGNfJo2gonD2lWwexUXRoXJR7N9R8R3PAjF/u/6MOoEcZ/wSebYHUFEcgl8CPlEUKFwiw8CYgrIyH97vjXXyU9tee/5va%2b/wPNs777z5j6yruvW7w2f9%2bX0246LRmEignRJQ/ZKJQFBGTpcQUTUYpg3cgwGY5NFuz4z5PNrzAXcxEQnGnbbJp2/fX9Gq0wdZAPouvd8dDBh9p1s2k899xrnSQ5M1Mebum818LLvzxsBJ1uyPBTyIS8vb1GsBrwVcLUDXmrje9mffKrbtTNLmLjR1r7qJUDfnWCIOJ18IXNt7BwjaxapjB5Khk6JVIrEyKZ2D97akVcXyetd1sjCUYRqWXWQ6zWBEgiioT6NsfGjF7xavXPjUko%2bWLH/mi5uyOvGCP805d/FX7/zwCa2ytS6JVtNA0CfzVV3St9vYvO1schopkNyT5EkuWMLtfXJx8OLgVEDCeV8qgSozjCtRcMYwGFdfvf2Zf7sk98j5k4f%2b3btQj30LeMD9IPpg6apPFod7Vp4ay2gD31zVCMkvQZFlzp6TBzvJYLp68FUqCWh1A3eJKrtNyLCKUnuXkouMitaUZqXQcVmfjNMn%2bvHxarb0wb%2b%2bcf%2bin5153FhhHUQX8U2rZj5WMevcQfOGnzxxyjdHSxM/qTdhZluhBgp4db0F2rPc%2bYeY82AwCMMwEQqR8g9IJnTOtrvdY8RxiGRUETDCwa/NuNPfAqQ7wTp1I2k%2bBSjn1pG2Lr4riY3TYcY9WQr261O%2byg5Q3wboHYWpgpXrCng72XQxSIil9nzv8TY42I7ytvdawGuBT7VAV5NyV4y7W%2bJGshh3/YpYdRMsu/N9J3ingxJjh5tldz/vzNp2f%2bOac/zskCdkp6oSeNdCdlCTAmiZdq93jRxnTAP1TSYH70ppCIVFoMLLFXf/4uU7tm9sXPlFBe/jz1tYPXDmVxYNGhIb8/76HBoa4gj6gKzh68C4dzixTCpeNXnWDD0%2bJalRgGyC3PBM5HImTp5QArmEYWiFxIJ%2bRZIL2boRO7c%2b8X9%2btuLhL2q7fp6GIg%2b4H2BvffuWVTMW3z72tu17zZp/rIqjJZuGX1VQELTsG0XMcxvrTvulYkdbV0YNTRIZelARKzG61gUEtGRoaVBHj0gEhaEcgr4IPlZU%2bCQTbI8CuYLxgtRMHxklW7fe9mPv4umy1259aPXPf3rl6Hm0ETHtLNcKRfEhFGDIIGQVopKlI3myUyKqwWBQuJLt0e52jnF/mVMmQxOOAPJCDuO%2bqAQrT13OA0ls0M5PETucaX%2byGXrf7QHvPC73JCvec3syi9ednu/kQiMm9M6YPSdb7/xe53K8J505wMHE28xrgS5awCl7yQfUxfjivibdrHq%2br3CPTW75nBhHOmPZ3a%2bL5wdicSvGODouZ7oqHx8dIU30vvB6J807EWJc957VoWcoYVXiQU0CvCdTDMmUwVelfaVBrG1E/e73lt321JJtX1jm/cwfbHtgyIz%2bUxINxpgN65t5PUDAxbrz/qcVZQaEAyZSWYX/S49UVu5YxEohTnELx2QyJnJRoLRPEWaMk9E/JuGsE2CoH7LXJ9/w1KKPXvvKIu8CPrYt4AH3A2z/TR83Pjmgb/Hpq/6VK39nTQPCYQUFASsllVh0Kjx1Axp6HqFEVAL2dlEqvdZhOdO00su4Z7tiIBIKIUFsOxWk8mITGbIk48ShCp5Y8Ma9e%2bLqG4vmn%2bax7Xn6jQcr9Yr9cO6XBlwiQLuRbYVP9SEUlPiqRiggc9AeDFtpqBZIt%2bzGutS0C5G32a7TpO9w%2buXSc7eG02kXme9U66qo1eki05n7TFeFqk4m3l2Q5rzw3Vp493G67ee60s564P0ABxRvM68FOmkB57XpZszFR8TqVz4HqK5urDub8Ll0xpGmuj9NO42bJYXt35Qv8ZnezWsVSW/YByKOp7OC1RR5vcvgVshxwypS1dJGm12kBhmmbsBgMlIJjXuaF/QLYmgh23b7w%2b/%2b5aEFqxfVrvriBQhVn/2b6st/Mvf6LZp0%2beZ1OTTUUw4JmdCRywxNajZgJ5bdrpFLaeT3buMPJiEc1JHWlHYbUMXCMqR/NyUNRZECnDFBRu9KPwI%2bYN8Qxhr/sm/Z8iUvzFr6%2bBdXivR5GJg84H4AvfTtW5bPWHx7zf99fWW8b%2b0%2bE/Vxi20n5pwuCvJnp4YkkE4AUDjIOAcl8bdbg0gsalrTUVkaQtAfQIAxfOLzwWcL5UkiEwz4UNoX9S8seuOs5cta6z1te8dOI4vOs8/pOevGORNObZGkc6QkyhOtKWhyCAFVQkhJ8pCJYFBFRg7A0E3EfKRtb%2b8N6jcKV3Imoopvoc3ImZMz5bSkYosG3UyRu2DVORk55TX0ORFQ4naZ6cphpjPtOx1nZ7IZt4xGsHJOds4Jtunn5Qtg6UweI0A9HYPzbw/AH8DAcpxtkg%2bQHmdN8Jl/rmDhhfwlX1u6QX6%2byV2stIkbeQ7YbRmd%2b%2bA6k8Q4t9tf0rMTuPPjsd21OgQ0dZJpQqy78HqnOZXAeyagwiT3GXKc0QzoWSBDZJjOYDIZ6aSBdBbIhgKYPATbHn%2b9but/3Pj0DV9E8H7FLS/OMCqnXZMtNqbv%2bSiJuKGBQQXRieTpTnMasYTZWACBRAZZnTJgLIwSDjCkdSIFLZDf9rAlM1rWhMayGFFVjtHVCkIBgylhBWMGAH%2b8442ZC%2bZ7Ut3PfDEfhg96wH0/jThp5mMV55w7aN5Pr5o478W3W7C7GcgYGSiSbKWgOoB7mEYW%2b5HWrOU%2b8SCZDBWk0qNtgGVAc9ZETDHQqyQCCQqMkjC3fyQvVrNOha9cwrRxCu7//cdLXvzLK1d7QQif7rCbH3i76pbvn3TTk29Jp545WhoopRLQTR0BVYaGCA9X0g0ZUSWNtBRAgY9xgM7HNXvQ2m8xKrOWEd0Melfg3Ome0CGoyZbM0HIxnQtO3%2bPOmPWu/N7drLtgy/YXnEItSduUOpgz0rn2sJ%2bL81QUsopJ3mkD6VyuF4PJ/grpDsO45e3ic9gCblnV5/AnHPFD7uzmximPcc4h7gMSC4MEzCtsCZwoQrdxc4ePOEG7GC/cWnfxgTaQ3mIB8OKC/AnPXa0Uitoesc826aCrUJXep0LJSIQYZCCV1Dk5lrOtIkk%2bY4F3HToFNdngPZlmyGQs2cw%2byYdpI%2bVtdz26/J5nv4CymR/cs3zG6u3RaZWnnXjdnu1JJDQNpqnweSrooxlH0OvWn1S4SsA9oDJ%2bQ9TcbAU1hQocSU02cCeiSVd0FIZimHxOAL1CjFEPDBgO/PW/dyxMrv7g5me%2bwO49R/xCP8Qv8ID7fhrw5gdXVt3yvfFL31%2bbK99Rm0Y8kUYwqPBBhMCeKDil4lQ34%2b4sVhUNTe4xBOBpgKWLI0Nse48wQr4AgsxEoiBoAXcO8GVEggpmjFZqT5j2/A8/euU8T1vm6q%2bqqfdXfP/%2bH/z8yhHsEiZJ2LrTgMriCEQKoWkMgaCJsJzjba0ZjGvayT1GgHYKV9pfMarzK53MeZtMxknEO9mLLqQ0YvKliavNKtJhKXkgyau0D%2bckmc9f2X16dxba1Jnvu3Oy7yzMKd9yvse4H%2bLI/AX8eFeMu8fGWx3e1c0Nved%2b332zLE4bsa3z5pvXstg35vn08G4CwF0301kgXD6ZDL1GDwL3%2bcLoqFBf1Pp0ZRHJpRtJHbGYZRxAQU3kNpMOqDAoYVWVYGg6cjkJWSYTQ4NEhtxmLPCeDQbQbwjwxKPLr/6iad7J133Tpg/Kx1990/PJJCpb61OoTzEUhgxkYiEEyQWjbdkfyOYs4E6mC6EgQ3OzDAmMhzBZxXjWCaalrJWOTNbEvpSGGacVY1xVAFlZZ7uZIhV8lN3963kPnLvTs6M%2bZqO0B9y7aPo5d7w/o39J6vQrv33yvLdX7MO%2beBqMRGKQuUymQ7hS1rEju6CGWPYC2/bR3dBkQ6gZ5CITQp8iA4bux%2b5ICD5Th0LxzhkJvXv6ceqJqP3V4h3v3H7pgK8cs7Okm37xzQ9%2bUHXigNL750zvPTWRARpbrUJUKtIJhKPQTItZp2LUlBTkTLvJyMu9o087/Ty3zEX8ZH5zZneeuyhVfE5MPJ%2bS0SQtDXw%2bFxo3cBcpg/S6032mq6JVMTE6J8nOwHw%2b/Sptm4%2bVF5O9s4DVzdoJEO8E804tfGe2dIIRFO3rLr7zAFw3vdiO8GF5bHw7cHdeG%2b55QzwX141g1sV44ry%2bxLUpPuOuZeEraDaQ7ywh1VmMKgB6UytQQmDPQRw4xyA3407bCSKCvpOPdcmOAVM0dnZmykYr1wTeoxG1zeedpmHOvqcJtBtcg50j5p1qlQIKEikTTU1UeKaAxQLoNQB4/NHlV//6Vx%2b%2bvfMLpHmfOfexin%2buLPnOhT85678%2b3m3CjKdRmzJQGKCJy9Gicjtwp/4I%2bUj4boc1OUze0wlAJYmSApg60LzPQK9eUUw%2bO4CIZKC8QmF9%2bwIPXf/PH6XrGx71ZLtHeGDsZPcecO%2bkYchS8P5bTrryrAkDrlm5Ti9/d0MDR3Bk/8i17WQbmLMHG15E2vE6od3SZdPqkMi0se2MQDtp9jQUF4QR8ftRGwxwz3bVtqIh26aiSj9SvbHumTvevmmhV5Da1lOUhnrhrJ6zLr2k5rKeMibuqktzO0cacJgSgaEzhOUk/CEfmGFCo8Hc9mkXYxQFL1Exaj5NuxO0t2nb8xSe5gP8bSDePh%2b6Kk7lWncRzGSz7fz5fsB7Z4Vg%2bZxnOmPk3eya233GDRAEMKDXnXIaDv4dnvBiO9GG%2bRhBAdKciazO7QUbmM9R49gMk963HukWyHfDdrzfxInfLwpRqQ/yFYqLa5AYdfG3M4jJXc8i%2btJ9HfPPOgtUbY92N0AnFt35mtMtRow3%2b1qBok7YdsECux223AWqznNOvEdMMP1NzLtKbjO25t3nk6DldOQyEnIMCPplkGwmbReskua9zxDU/nNp3drrbnz27qb3r3j5SJ/TR2v/U2cvqCj/0pxVGcNfmU5mUVdP5JUIZbLAezigtyWqdmhX15Mc3VCpFuNOIIccZlJJAxPPLUVlMXBChcyqBkrSP99i/8xtXnXlj%2bfWeIFMR6ujHd/jAfdOGv35ZR%2bdN33iwO9s2GFctH5zEp80plAaU/hSk2BhScdOg4d4CLaDy2jy7Fc0tsW2mzxsqSzEYFQUIUFLgJKJRnKgYRLKyv2o24X6K86QPjz5wse/7XmnWg1KoP3frxk4/pRJI2cnmHROkcHKs5kEAooCzTQQCUrISRFeeBpRNOhG/lRUkshw5p1rlvL3F30fZ9k7EhdtPduhaNU1AIqPuNl2Z2BTm9970rKJdPq/C%2b17vmCmzopUnRNoZ5NtV4BdTLpOFk7o34Xvs/iZQhvvZtCFHl687i5Ypc//P/beBM6OqkwffqruvnR31u5A2AKCgImA0QSBUSEIygCK44YLCG4wo8I4CjPoKK7zRxAFdXCGTfETdMYRwQVxQERlE8IWdoEkkL2708vdl6r65j113rrvPV11782CZqvfD9K39jp16pznPOd5n1cOCrYXxn1nB5Fb0jdtatmxzIOuuTPES3TrhDWGUq9A/i2/Jfl%2bJOAPA/CmTCaMde%2bY/C0E0Ee1U3RfoQnpKNBfkxVBRlXDEjKszlG7Sgw8ZVhVAauW7zajsq2S5r1GdpHAKAHQhgfXtlEtN1Cp2hiPpbDkICy//ner/3jBF%2b68eNXv37fDZB7/wDdevHrG8XOPf/6PflKmgkuzEDaqDauNeKcyDc2eqjcw407vhrO5j4052PfIWdh30MX%2bQ5aXnEYZZ2A98u3fnrR6Ven%2bXaz7lrSOm3dstzZj8866Axz1uwef/9fGwD5nzEs58371x/WwkjHMyNjKE1XVcdKANYBK0/9NSZhoCfNql8VBQM5RzLqD6QNZ5BNJ1AbSKFUamNAMPtk/HnZEEo1HvdvveOjxh/75Aws%2bvQMU6VZ5hE9ddtf8j51x%2bPkbG9ZxuyWtwcmNDhIoIJEbgNMgWUwRtVjWT7BEZU3MeiYFR784DkYltr1Y9IOf6N8sJVwKoXiZMY9ig4IBmrSJFM4zvT60vLQJ4sOkM53SjPM1wxxqwgC96cWs9jEys9K6MOcaBuhtQW4GA8/3Y4L5Toy61M13Avq9lu%2bW7rdLyrH5JUhltymzKLw/OajQsqPHS6hZLO3sIiUw0kEmLI6EykbKYXqJX5Fv0XSckt94N3vHqKRLdA6VJbXLrKH0ced76sS48z4U%2bzXcBOZQtvJSU3m80zoG7xSw2qw2VZK9OhEzTQ%2beZWPjWB3NfBbZIWDNI1Wc/U//dfr%2b%2byRv3VFsDV/79l%2bf9roLj/vHFx5xDl27vIhJIqySQL1h%2b/aQegk4KNu3fcwJYwJ6acoRbwK%2b7p0wziRQrTSx9%2b596D8ghvlzbMyYYXvJecDe19/99bOvfOi653//8R1mALT5rdxf9shdwD2kvOcvuXJo2W0f%2bvlDz9RfM7y%2bjMfXVFSQqEycRJVaMu78aRCgL5De3dJBqHoDb1cBqc0mcqkMZmcsJOIxDGfTSMHBeJVGwyTFsTFwQAzVB1ee/Q%2bf/91dq35/xq4P4/8cBShQ%2bMMfXnj1XhYWbRj30KwW0Wi6CrRn7aJg2tsTLPmg3bfHksGoChToF8P6dYNgV7MrbVaQQvNuVp0wEC%2blM93%2bloma5LnpHhmE0/pOgauSdY9yojE73TYwLwC7CdTN4DR2nwgDABJUUBHLKX5mDSUYpv3D7CQZ1NB26WZjlv2msrrdmlnzfFv7/N2uvyNtl9rlsJnIl/pdbs2yfCnqAc8wyHiRTt8IucVEseadgHmvwD7Qsk%2b0vNp7YeAl686SPzlzKHXuCiTKm%2b2gcTd2U/prcpnJ98VRLjZRy8TRV2/64B1APGHBqTVRa1iokXtY00Ol7qFacZBIxpCek8KzK1w8%2bejSs7912RN3rVq6Y/Sv7/3W6K/dgfz8at2eu/LFcSQSQDJmoyJYdwncZbkS0x5M51Aiwj5/a60ENJuUbbyB3RYMYt/dXLz%2bFTFvn9mWdecvvXsevm/pz3560Wu%2btjW/sV3n6l4Cu4B7SBn923UPnnX%2b%2bw79wn2P1QeXPjUKK24jwZoYz3ePoWyp/ZRciVhyI6pG/bR8fTsFp5K2nRh50lXXXRf5VBqz8jQVlUBzegalShPjVVc1OgOpON6%2bMIaz/7Ny427eE5%2b78OxdGjKSx/zNklmzP/EPr716ro1Fa9ZX4LhNNKw%2bpL0CshlbOcg04znk7KqvaaeMqJ4fnMqgnf4ipl1575d8tl1mSTVlLYFrDFPFzKqXWwGroeDdRCem97vInBr2iUqfd2amaL9uKcQ7ecJHyWvCAs3oWm0ONSFgnrdLZj7MI17q3yVrGPU3XdtkZ3th3KmIt6asYhfD3r3z6HWPTWXco84bBpr/0gOsLakXUaA/rBOWwD2sPKQchrTt9Dss0LxTJtQwPbs5OKdr9wraeyEUZHvW5irTg0ymDcDrPpcYd2UVafmyVXKboYBVks00a03E6N8m0HBjqJRdlMo%2boO/fM4X7ihjeePeK//rG1/73P3aEgNXXvv1XpyUG916o7CGfK6HoNJGMUVyei1ojpqYmGJsotp1mtDRTxcA9k9dTXHq9cpcpQCW32nvPfvQdEMdr97W8VM7G7Q6s12%2bw7vnFRTeccvvNuxIy9doebo39dgF3oxQ1237J6op33IMPVAefWzeOTDKG/rQP1hUmF2wB68XCXoaf%2bbQF4CljZ6XpqmRLGasB20thOJdGsepoJyZbZWM9/tVx/P0Fvzlp3YrqTq8fIx/9T35s/sLDj3jFqXukrPet2OAigRISMRtNFYgKZGNFJNMUiEoNtOtbPrrkHuPDQ2LaWRJDwF0uSiaTiQf2nLwtLA03bZMuM2HvXDL0ylFGHdSeuIlWhbHvcp0/3NDadw30lYRG/i184HuZnp4C3gUgD2PhTQA/xS9eaF1lWZjT%2bvybxz9SB6%2b%2bp4iWzJTSmHr6l1JO81Iwq1ujwd4ez7G1yjJsAGDO2lD5mAGcW7PMtuRZzPvvNOiQAalm0iR6Himt4e%2bCzxc2AxYWv8L5GkypnJk1NcyXPUoq0ykmZ4qTTBsS1z/cqURYp/dHevdKuYlcPq4CVgnIU7tbaGjNe9VBPKFcIjFZ9JR8pFS1MDnpBkmavvebF/54wWduvXh7T9J08qnXD03bb%2bZrku9/43dH/tBUrDsBd3daBuliZQp4DxLK0IBnAsgQkKfKFJaQqeHCmWZjr3gGC/4mhQMGHW/Pgbh12HTviX/90l3nX7nLPGNrNjNdz7ULuIsiWnLqbUOHHR6b/bWPv/723z0wObhm2MN4rYLpmZhfxylgg0b4dagGghee6mSGPZBbkGxGs%2b5kqZqKu7BcF/OGMmg2kwq0p10H4zUS4xE7b2PvoQR%2b9qfJe%2b74wX%2bfsivZEvBv19531hnvevWR62vWcdMb3mCt5sGO20gS064CUbNwXAu5WN0P%2bDVAO5UrgXXyaieZDOvaN4Vx7/QVhQH5NgtJAumZqZ7F3b5ME8RH7c/ONOyLzGA/jJ2ncxArFuXHbAL7Tr7wkmkPm4I3/aI5UyMDdcnEhwGTTuBLgho5GCDmMUyK0UlLbw4cuu3b7b3t2v7SlcBfk3HfEsBu9hOyjnFdNusdM%2b5cP%2bWsk/yGqM7zsdIlxvRgp2PM777T9z1RAAa0XEIeK4G5jLPhtiVq1k%2bSXVweYW2c6enejShR/bAuHALwRJYRcKf1BN5jMZLNkETGf/5Uykap7KBec1GpWXA8C4cvSC7/ylUP/s8vf/HMJdu7CcSFV9w1v5o7/B9XJtwz11NSpjqx7h4a/Rk0N9ZV%2bZDUSMEZXXG0w/XUxlOXbUpc6xwAACAASURBVI1iFgiixJoYacZwwrHTMKfPwyEzYyjv63m3fmP1tT/4pz0/%2bNJ9%2bbvObJbALuAuSmTxyVcOHfGmg075%2bllHXPHLu6pYOzIOx7IUCx6we6Rt18CdQYMC56kWSKdTMoinfwd0wqXhoou9p2UwQPqZegMb8xlMVCm4kj4iGzNmJvDyA7D%2bvPMeu/QXX3/lTq8bu/CK%2b%2bfPW7Twm39zEBZkXWuwMObATtjIegWlXczk%2bxRYz8dqaHpTA1FV46SdYwi0y%2bBTKZGRH4Wpce8G2pX%2bvYN0ho6P8oiXDjNmMhJ53Tbm3mDrw%2b6POruO09aTwIDIejihf5tgX3bYMmvi9IGWlCYqaYu8LwlKGKSrdyN2MoGJPD4qJTtLagKm0QiKjfKVD2sEGUD1osHe1Y385UtgawDnLbnrLZHIMNDu1PkqqYuuv%2bbMEh3HoDyMTY%2bKMZHXkwPtqJkzyaIHMkG3PUNqJ7meCd7pN%2b8fFoxK7R9vZ2eZgJXX8sKomU9VppbvLkOzqfybwDutV0GrNlBPxOHVCag30ahbSKYAx4thZKwRZFiNzUlj2ZO14Vt/ceeZI6u271nuJadePzRR9o7f/93v/P76FyqYrNbhuJTl3VEJHdkhrVKLIZuimX4XlWYs3EOfmPgi0DdNB6lWXdTyFg579QAOHgQWzo5h416e9%2befjt/75XfMOGJLvq9dx25aCewC7qK8Lrjsrvnn/MNrr17xdGPRMyvKmKhVkIz7lVqCDGoQyD2GM6Byw0wNBoF4ljQTPic2oFQDmsp70MH%2bQznEvBiGcxkUqi4SyubEQl86hvTMGDaUak9cecGNx2zvI/9Nq4ZT96aMqBf/8BM/PH4QS1aNeKiXCojFPfU%2byAO/L2uhamWRs6pokp2j1rU3dSAqn1EGpErGPQq4twFmy5fGhC1UB8i1ptclKglTp%2bNNRsr8bSZ3kuw7d5SbIqEJY8umuNcYTBzfv8ne0Xryew5L%2bsLHhGlyJTMf5hcvGUb%2b7kzgIs/R7f2EyXp2se7dSs3f/pcE01EymeA77%2b2WI/fq9izdtpsnDutYw/zYzTrMdY8HpSwro/PJb8yc5ZK/iVClwbUpeZHHmzEqUVK5TpIYSQ7Qc5gzdlOCVbV0VAbht2WO1nVqChPfIXCV%2blwmZKg9ZJ930r2T5r3Q9AE8ad4pw2q1Zqn%2bw/I8FCqe8ikn0mzm3in84dH68K0333nmiqdH79%2be%2b1/ydY/Nftut2fn5Q6p1DxtHJ9F048imvRaQobKi4NOmj25Ck18RcJ%2bkYF9tDdkAqm4Dew4O4M0nJL1Y3MHqSsx6%2bSuALy68/LjlD5%2b7w3jjb2Fz8pIfvgu46yImLfVJpx11ygVv2%2bOKX/1hEms2%2bnl/bSPytGOSCN0wyY6fZDWE72JwMSubwbS%2bBNalk0i5LiZqrrKyIruqGdMTOMBt3n7%2b9x7/zS8uPmynZtsvvOKR%2bYefvOCbx%2b2GJSvWuSrANI4CkrEE0hlbadcdinS3s8jHqqjYnBWVAHw77GLgzgGpZPtIMhn6Vy4mK07vWWXry/v7scRGdbSW/5u20b%2bZTPu5or7awBNeWEeGZlbVHRXfU0cAb1hPyn0DjXyXpE50v70EloVNk0/Rx4Z4PNP5o4CG3CZBGDdMFDxLr5T1uMy%2bMzin/aS7DfvOmxIaDlxl8ET3Qwud1x86b93g1pe85f4LXiBKi01Vj8qzk9vP1rrNKJmMKZvanEEXSx0l493LfXfSqMv6ZA5y%2bHcgcdFWkLTeHHSyZCb4HoTTS6d77AbEFdCOkMNEHbspbHvUvqbOndplzqRqJmQyn6%2bbXSRtJymIYuHzcT9olVxmiGgja%2bC6gyQlaqoBNeKamw5cz0al7KBKUtbdU3h8LYZXPXT/5356y3M33nfD9htwuegt/33aidf%2b3Vcf/Elj7vMby7BKjiK7pK6dLDPLk0CeLCHND4dMHQicUAxBwc%2bmSu%2bqXHYxngI%2bcnQf8kNxr6/PgrsXrLu/%2bcI165befcGOYq/Zy/f/19xnF3DXpf%2bbe5874fHCjHcvOXja%2b%2b9/YAwVp4o01Va0XGQCXbsvSVd6d16oIIsN/xcx8azNI2Y%2bEydK2MHuM3KwrRhG0hkk0cRklfa20Ze20YjFhkurnvv11Vfe/%2bntebS/pZX50h8vO6v/ZQcfceZh1htWrHP3JNBOPu3JeBypNFQwKjHdBJZVcqV0Gq5DVo9eoG9W4LyoDfaFlo/lMszQ8DQrg3IJ3inoiRaphVcdLs2glJro64ujUGg509C2KEkMl4mZRVV2RG0gXUhvws7JgJzlNTwDKgNhFZ7XMiHVMUaAd6q3YT7xkR1v0d%2b/k6UkPW%2bUfrbTlL0J7uW%2bYfIByZbz9Wid3JeBj1kvpbxmhvYL531MFp7WRwHCTWViN%2bX7eCnP3et9BKB2Apg90CoHyQBT2WzC5FNPl%2b7l2fne6IQ8MJMn7wbi5fEs4aLn6HYcX0M6Gam2wbA0lfVJDTA1QJeDT5kgyax/9JvvK8wBhtfxwLXjIFoHopu6dLqGjHsJ%2b%2b6pHaHZs06Bp5u6TUoDg%2bzRwpGQQXybnLCL8wy12eQaQ5ptauOpvef30qg2UXKhgDsB%2bHodqDpAWmnePVTLDio1YL/%2bFHJ74E8Xf%2b%2bh33/uQwu32/wpJ5965dChX/3grx%2b7F4eWR%2boY2TiJdFIbtRPTXrOU1p0GOmEV3pqegDPSgE39ILHzNtAoADXXRbHm4FULZmDBK2KY1ed48d1i2H8Ma%2b%2b9fenxuzKp9tS8bfFOu4C7LsIvX3vPWceduPiMzHhj0V2PjoK%2bfnIuoQYgl/SlMQzcCTjmU76Pu1yowSBNOwN39bsGxK0mMok0dp%2bdBWoNbMylUSAnGZWdzMZ%2bByThbPCeePyxR7/18Xcd%2bt0tfqvb6Qm%2bct0T81%2b%2b%2bOXnlUfqLz/ulelFhXE/uVItNoBszEMq5aHhWfAcC9lYTQejtpIrBY%2btB1bEunBQqmILSs3ADlIFSxE7o9cpcKZ7bF6vjqftglGvVHywzqw9HSMZeN9%2bMnwxHWfC9moLbNVoKMr/nY6PdL%2bhjZrZlxla5TXZpUYmfOrEqnFjQcVkJnei81LnHpa4JQzkh03bMwCR9yjPZ/rKc/bWAIRPAMy4mwGvJhg3XTnU%2bxcXliysKc8x99uU5EKb8mnSPUSlq%2b92nijgG9bgy77bBK0MOAlgMuCUsxUvFeMugS4PxqKe2XymqPfB%2b8n9Ze4ArgO9AHcJ%2bmXdkmXJMhd532E4yQTnUfKyKCacz98xP0NEttMo0M6APiovBG%2bntkW2B%2bZxEtCPTwLT%2bn0SgdpMLu%2bwhHNyH36%2bbow7Z1Sl/amNNomYkUIT8ThUsGoybvngvUmcmody3cP4mIPEzCzWzsH6PTbgsVtuW3buhR865LFu39q2uv29l4/8es83zZj/1O8ac1eumgDsOGK2BRWxp0nHKRIZIqbGgVwfYM1IwBulCF8fvJOnO/VPkxMODt6/H0e%2bIYHBfscrujFY%2b8B6%2bMLfnnTtl4/9xbZaHjvSfe0C7gDmn3z90LKbTv2I53lf/NVdVTy31reATMQokKX1us2Gg8A86diZbaKPYLLhr6OF9O6u42J2fxrpuId8OomRdAqFmouE7cJybFCW1LcsjuG0T/7%2b/Af/sOyWVUt33ixkn//uAxd/7iOvOm0S1uDYCxOwCazHbTTtPFIpV2kTPXKQSdaUN2/adJDRr4qzo6qOQTMvBNAlkKfftBArQ39L/TtPtRLolx2ADIYys6wyM0/n7AbeFcvRZaE6Jd1oAlY9BMwHAkWD9oyS2HRyrGE2X2njBVKXrDzdelggq6lxpf06eUCHecHTMeb64HcXGQ4DgbCiDZMlyP1McKgYZZHNkkG0KQthANcNXHZ732HbzWoiB07dwCXfr5l91FzPwDWKsZYAtVO5drufXp7ffN5NleKYx3cbhNC75DpDx3bLAyDPbw6q6DyBDEvLh4IBpQialoHWPDMkzxumY6f9aD0NSsMGsr0A9p6kM3pWjsC8%2bY3z%2b5MDdmbKCXiHtQkyzsY8Jwej0r/c5gQEg57Vo23dwLqsV8oEhVh3ztEBnagpH1dtWa3sA/eSa4EYeALvtRqQTNqYLDsoVzzUai6a2QwG9wSu%2beHKG2/7wW1n33f7h9f3Un%2b3tX1mL3rg/A%2bd96qjV9Sc49ctL6DsNuEg7ncXArG3gXddGSnnjML3euZZ%2b1Urhn5sg4tCxsPfHjcDu2U8DM2yvd33Bq7%2bxz/%2bc2l47Pu33/CW7bK8trX31%2bl%2beoAQ29PjbN69XnLDsrPe8o5XnFFb0Vz0h0dG4FqWAoyqfodGbfhTTFR4BN6JkWdpdbC7DlRNwsGcGRnEVAriBJ5LpJGIObDXAN6gjXQ6gYEMhv/46zuPeWzZ5PDNV%2b18lX7xqTcNpWfucfodlx920VgBGCu4cKqT6O9LoI4c8pQVNZ5Fxq4plxgaTDmup6wf/ayo7QtJZYoFH4yztp306JyoQ82iaDae/mU2XoJ4E%2biznIbZeJWBtdT0Z2T0lCz9poV%2bdwLvvdZSyRgFLg90sBwpit9hLjVBpHTERaX9GkttZAKowO1Bd6ZmwBkDejp9FAsfBuhNZ4swcE7njLKuZFkAg582wGMA7ii3jkC6oEGRyZxykdF66T1vsvfMooaBV9nAbi64ZfBMz0FLL5pyCbjNrLXyfs37kwCWnz/qGbo9z6Y8O98vByTLc/OgSD5T2EBLvi/6O%2bzZaB0x2iT74c9IAmi%2bbhjo57LhwRCfPyoYmq9FcRRmnZFZUqXTEt13LxlOze%2bllyRJDK5lU8CMO7UvneJc6BgTiAcSFx3zGGRG1QXD9YyAPQfJm0kbeB/zfXXqe7u1nwpsUgAqZVgllxl9APXZSu/uQCVmYvBerZOEhgwkbJRKfsAqZRsdPCCJT1666poj9il849PvPni7Y94XnnDtgoOPecO5Mw/b%2b8wnnqxj9ZoSUkkLuTQFo/puMqqcdfkE34NrIZtsotyMKbK9VABypIOHH6zqui4qjoPFC2dirwEH0/dIeNY0WPf/rrH6SOupN51z2vY7S9Gtbm0r23cBdwC3PTx237yXDcx%2b4anavEefH0MmaaE/Y6uES2HAnQG78ozVziM58nQUNpAqc2rVRTaZw9xpDuxYAmO5FIov%2bGy7Z1mwZsaw91AM//6jF65ZeffPLrjv5nN3upHq0MJrF5z7sQOPPP/0xVdQ%2bS1f68KpFRDLDiAd9xtUr1ZEPZZDLlZV%2bvYaB6M6LV170GkL%2b0cT%2bCp9OrHoGrQTmGfwLUE7nUsCd5Opl/sScGe5DN%2bDAvnZ%2bBRHGnY9oP16BfaBG43WvYcleGpj5rmTEgNOk72Pcm3optFn8BEWRCat3czpdbolOSUfxhrSPlGWk7yN/jXlOLTOlNCEgR8JxKSEQYIreVxwTsGWSrBoAmOSkkQB9y2V0vC1Og0QZIcSNrAIY3VN69MonbpkkqVsqBfg3msyJLo/nuGQOQDk9WgfGrDRfRL7bF5flrME1fLdyPdGZRY1KAjroM3O0rQ25QGAqkfjgNSvS5lREGg90Qq6lnXPvHaU3WO3OBPazt8M/Ssdpvh3GLvOAJy/2ymgWweUmlaPprVjEIMjLGwlKTBeBKbl2y0hg2ePcJLp5utulh3HKpFGmxI00b%2bkfK%2bl43BrDhqVJuIJn3lPJf0kTdUGUK95aHo2DjwogZ/c5X3n3t898Osr/3XxdicDefv5d52XOuK1p44V3UPXPb1R6dxjcVu566j6TP9jgwP9QaW0dSQ5zqgMNtIAIebPxG54sYG5e/XjgLkWDjwk7pU926q%2bAnjsn%2b45f/ljq29Zdts7l20rIHdHvI%2bdHrgPLfiPBffe85GbXnx6ct74pIcVG8tIJ3wLyCi2XQH3BjCQ8pMxUX3Pklc793yajR%2btuJidS2JGhuyoElieSiO5wcGKpIf9mjF4M2zsvlcMl11y//n2ROH7N1917E4F3JWTzynzTjn2pMVnLJqBRQzaKVkGvYMa8optJ0BZi2eRt2vK%2bjGTTsHxKDPq1E9S2j%2bmhTa9WvH9fRVTrgNXAykI/CRNErCzlIZAO7H3UeCdjpOMPd9RGFtO11u/fhJDQ/09A3c6n9lZdfsd1lCFlZXJtvMAwEyCou6B9fKl8Eynqs3XDb8MXu3FiSJMF8/PEMW4S8DOwJ5AvQRADKTMZFDiVtX%2b3AgGSWsmgRn9ADna0L9hgNZkX8NArARy5jsxwbW8D5P1pWuZiXrC2F856yDvmdoychBRi/a2JXBG1yEgTLE4NDNO5SeasCkZbSUYNmUm/HyyHEzGWz5jWB0Nm9w0gbWsD7St08CArx/GznP5SXBNZTw0rRVXEMaKy8RhYYx7FHtuPi/XLVlf5T5mAqVO1o5m/ZezYrRtii2j/lSjADqVF22T%2bnXpw862s3I/ug4ngePnCAgCw/mKjmN5jXxmdpwJi9uJCt4Pq0fmOiZMyOM93xdXLDy19gVi3lUsG9CsO2jUgbpnw3MdVCrA%2bKQLeyBNiaj%2b9Mzq8tMf%2b%2bAPL1619KPbFSA966t/OHHa3CNOWRl3z1y3vIgyGnDcOGwXiM2Iwxklv0y/QsSmx9Gk3zaUx7vyd5cfkS5YmskojDqo9NuYPXcaTjjMwh5D8DamYS29euU1g9h442XnLdzuBjm91KVtZZ%2bdHrhf9P89eNan33PoF%2b56pD7459WUFriKZMxWI3MqHNKp57VmXb40paejUXzdX0uNEQEqClol33b6m5j1OdNTcJoZVGbGUWy6SKx31YDAmmFj9l4JbHi2PvzZc69csrNp25ecetPQsccNnnLiOxafcVDWWrRmxAUaRTRifchaRdSaQD5jkRkPGvGcsn/si9dQttLoi3tKKjMFDLntwJzBOAFmarR5YbcB%2bi217pKNl6BevV8hr%2bHj5bHMvJv3xC40bD8pf4eBaZ7BeSkaiEgveXOuNGTQKmU0YcmiqLOlJcq9ptM0fJhXNDtZyG10fgbnYcGtEgSFMalcpszMSr2xmeRJAqtgAGAkeApjwCUgDGO%2bJRik%2b6GiD6QR%2bvym1lqyxPKc3HhzWShwrkESZb0k2cmMAb8dk8F%2b9E1RAi5m3CkBFx1H70gCdw4Wls/PQFcOLuQgwvwqw4B8L37m6l0a2nC6trT%2bZAmKeS90bJRNJJdZVMfH75TOQX%2bHAXW%2bXlgyMXMQKOukCcajkpd1Y9i5HktGPewbov16sXml/cLYc3oWdqQyQTmDbxn4zs8uE8aFkV/cDpn3rNqVkKBJs93qVfcutdx0DEslqd9mYk61x44fsFpvWIp1b7g2XMfB2Dg5zVhoZNM4cj8s/%2bq1D/7Pnbc/c8n2ZHm44IRrF/zNIYvfnPjQgRc9%2bas61q4vKhmw7XmITfdlAs643zfGpvnklfod99UEpQktk5EfMkmQJgDPbmBatg%2bve3UMp7w2iYdczxv/De5dtmb1k9f9465Mqi9FH87n3KmBOwWlXnzh8TfPmzl90bMrJvDc%2boqSycSVIWznYqfNJQq4FiVIdZsdaBzHheW52G8oCzsWg%2bNkME5auriHibKHvtk2dt8tNvy7P67742fftfvbXsqXvC2ee2D/r7xx9dMXfDlW8xYNFzxUi5Mq0UM6bqsg1HzWVqw0SWMIuPfZFTQ0204uACYLyrMdzKgTQ04LgXFqnJkxl%2bCdt1FDzsdL7bsE8gzW5TpzX9a90zVIKkPWZOxAQ8401AFJuQwHuMr1YdaUm/r%2bZFIS81gpjwg6RG2zJjvIQFNPM6W6jks7yzY2jS6inXzYqYZGsuzPzJ%2bI6THP%2b3Ri5aXEhi5jTv9HAXgJWqVmmCQWstFjZxpZTgqwaRmDBNUk22BQSCBSapsl8DcBPV/PdBlhjT0PEmTfKFliOl4CfNrGoJGfPwDmtj87MqAHUvxcVMb0HtV5dWZdrgvmIIVBq3lfJig1ByF8LenUEgbcwwYfPJjia0p7T7OzChtIhZ2T3xW/Nz7O1PzzezD3N%2bsE36PMIUD7SHAvz2V%2be2EJx9TxhmSG67mUhXXSsJvfj5yV6OgSZY5S6MIhMhj6YNS7F/klwgLcw2bqwtouZVOrWXcpr1GXkBI/s5Hv3i0Hl2MjAZZDUt0ntj2YbdWVPE45ORxtE0kJmqqWyspNNpGVsoexCWLmYihlUxhe4%2bLT599w%2bv779N%2b6PQVgnvHZW0/MvPmNX1rzeOPQFyaqsCf9jKkE3F1YSJZrqDZjyMQdNPIpOGNN8mBuse26XgSFSw4zBaBRc1Hss7Dw1QNYvJftDUwD3LmwXvzp%2bD0//89ffXTZbe/brmYnNrWf/Wvuv1MD93f9yx0nXv%2bV1//8lrsKGJ5wUW1UlQVkJ4kM12HFuNOIVDPufWmfaaeF5BwJ28GMXBoD/SkUCg5Kdhaz3AKKdg7Fmof4DBuHvSb2xOtfcem5G5/81E6VcWz6gd9acNNPz7jpqAOz8yjBklsrwsr0I5sA6k0PGfJrdy14tRIytJISLjkuUhEuMlTmMiCVfjO7otpn3RlItxlar5J0CCZevTyBAMz9%2bUNl9p2vI9dLNt60o2RdO9Uvku7QdvaCp3OYnvH8u0120yGbK3d80qqyW%2bPCgwberw3Ye5ShFigIX3nab4pffLCydTXZsUsGjvdgrSv9brODI9bNAA%2bd3Gro%2bE5Smyj20lwfgMEQENWtDIP3H8LS0jZp6SjPFTDmQpLD98GYitn2MB2/PBcDd1nWahbIYF3lMTLG2RygmLIhc7sEzwyMJYCl68iAXnoOyeCr7zJEC07rZWIgafkZFWQsB03BYEjPNvDnLO0/JV6V98HPwe%2bMf4eB8bDzBucyB31d6tQUUC4812VfFCZtke/TzGQqPdt5MN/mClPS3x7/qwPQTftYjmkJBvNd3Ku6MeKSAGj7tiRZJpLU9TogML9Tvg%2bZTZXbfZY/ku69QZLKShMNnaCJbCLLDslFYhgZa6BedeHCxrQD07jr7trw7bfceeazK0bv314SNFEm1cbACRfMWDjrE8WRCiZSHkgM7NdhH7hTICoVf1zKZ0SBtr1TnaG2OEZYp4H%2b/j6cdGIa%2b8xxvHtGY9aKVVg9fPkvL/jTLSdd12vbuWu/TSuBnRa4f%2bVHT8wfG66cftE/HPapG24tYKxcQioRU9q3MLadCopkM9QIkE87LfSb/laj%2b5pOC0x6aduBY%2bUwd8CFE%2bvHSM0DjW0nZjpIrLIxsJsNJxEbbq5d%2b%2bj3rn3gvdvT6H3TqtfUvecvuXLo37/xt5ccNX/O%2bxRorxeRiHtIZvpRJ3lMvIS6nVMZUHPxhmIPqaGnSHZykaH1ZnZUugqDbJbHkDTGBOa0j2TeZQKtqOeSyZxMhp2PYcae9fAcvGruz3p4lu6UylUMzs4rWRUNIFhOI/3k6RoS8HM216jgVg7G2pTg104dbVgwmBpIGPKaNr286NjNc3OnzYybDGCTAJidKEynml5YSAYsnVLE07VM6YLpIx%2bmM/YsX/celQm2jVU1pDX8fKZvN7HMpr6c9dYMSiUrTucJS3DFGmHpQER13rTrk7MWYeCd1gUDBj2oUN%2bYfgDJonM1kM8t2e82NloDWJ5N4GvId6HkPpYv8ZCsuwm8o0A8nZPKihZ6TzzAkNfgMpUzJmESl7bn0Pceybob4FwmD6Nrm3XStDzlwYoZ00HHymBv%2bTsqCDwsGZJ0h5JTTjLQPIpFn1KvBKiW7aY5WI9qU9uC5SPaEdMNa0o7ImYCO/VJPMNJRIlcmGAh4E5OM7VUHKTPrNccJOIWyGkmlaCy91Cp%2b7WoUHQx%2b8A0hlfh9jv%2bcN9P7vjN8hu3B9nMyR%2b6aejPyx575cs/%2bKnfjBZtVJwiMO4gNjOJZKGmNO7sIENlROudUQI79HcCzkY/YU3bO9CzMNWKi/WOjQ8dk0N%2bMOEtr8FK7Q1M/HjtNdd%2bYu4HtxQv7Do%2bvAR2WuD%2bk98%2bccLC1x34%2bXVP1Bc9%2buxGZQHJ2vawolLti66szLJTQKoCNsTw%2bjEdKsiLQHo6lcRuszIoTDooWxnEQdNTFgo1D7N3i6HetJ945rFlv7rgA4dst9nZNvWjuvhHz86vlYaP%2bpczFn9hooTB0XEXabuAqjWAdIIGPEV4JI/xPDTjOeTiZP9ooxZPIVavwPOiLSAZvDNoVq9LMDgyaJUDlIL7F17vZkReFOvOx5oSHFpPAF1F3m8oYnAwH/wrk0FJDb3pIy894aMyt5IEhwA%2bs/HcQZn7d3KKCRxqDEadniHKvUG62tB%2bYZ11J02q6XAT1vFL/azJGEsWMUxGY7rORGVwNfXF3Zxu%2bD7DgFUYq28m0TE19CbbTs9pBoaakh52IwnKQKesN8uE/a9lXAKDOarPlARH/SbJTF9L667eu3gh9PmYAJO2S0ArJTwSHIdZJEoJkowz4EBX2h7mlGLKbSRzL5n/sCyk5uDLbLPCZlpMHX23di5KrhVkMjWylgZ1Sa9nME7/hrkvmTNO3aRlUq9uxuqEWsbKBzTkKG1BoaxB78K49wLgzXapl2NU/dTXVvuHtFttj0KEWqWV5ZoSKKr2uqBzeOTjymmGYjPr5DJTaSqbyFqV/N4t1BR49z3eKasqSUMm42l4o8Dsebj9a9/%2b7Tev204SDhHrPv1v3vnrops6dEO5glSpAXd6WgF0Auq0JIs%2b855N%2blkEa3XfLtIH7yQtICQveE0LaDTJLrKKgxbMxtH7e2hOj%2bOhSaCytPBw/Q%2b/fNPNN7xnpzLc6NZWbK3tOyVwJzeTY0959SlfOv1lV/zqnipWrBtHhpxkSOscRrhrT3aVWIkaA0qsRFILX8XhA/eGrwkjHXZfwkEmmcbMGSkF3KuJLGIeJVzyUMxZOPCAOGbA%2b8HRb/zWD9Y8cO5OIZNZfPJNQyedMnjKtOn7vv3skweXrFjtoOG6SKTiSDuTSGdI026hHs%2bpQiVWnYJR6X2Qzj2TTaNYPhh5XwAAIABJREFUrCCbDfdulyB8ih2GZuQZ1LNes%2b0jChPj6h2YdZcMOktsTG08HSJ19mY2VjXA8Hxwz%2bw5A3e2leTfDPTpGBOQ0zqVKEp4yLNXvfSv7%2bYpH8qoGxIZ6vDoHfDSlt3VYL7MaXCzgw3VyesBADF7tLB0Rv2t3S1kAqgoTW%2bU5IDO08k6L0o/3Mmeks4Z5UUfxT7TMXJb4BQS4l6jQOyE394Qc8xLEIiqNev0LtjSj/ZhdlTVM32QjDHg87C0hoOKJbst5TrynsP2Yd9189kkq26y5WbnJe/TBLtyACSBv7xeGKsu10n2O2qmxHyfYcfIa5rniQTvIUnD5Lm71j19fK9gXYJ2qjtS5tJRoqJn0aJCu4LPP0TCwu8zNOGbjp8JAyybGnRqkgbdJDl0TZqBlEQItZn5XBwbakC%2b6cc/ETytpuJI2FD2kOQ0Q%2bCdQDytGy9R4IijWHhymqFg1YfKGG4%2b/uf/%2bu8fL/3SfTdvH%2bB0yTnPX3bwh/b5xJ/vrGN0eBIYoEFIHYkZRDVq4O7EkY07qPen4Y0RqOEvyUNsdhLOcKMtKRNlWW3EHPTl8vjgG2MYy9sYsW04noWb3vm145Y/dv5OgW/C6vdLuW6nBO6X/njZWe6suUe89YD%2b99/%2bwAhKDQuJREsCo7TqumQUQ5j0tewqSEyUWEZYQFIjQtKZlO0gm84gm6QkB2lUq3WMI4OYR4x7DPYMG3vsGRuur2p8/5Jv/M92FaG%2bJRXx6E88dN4Xzz3k7169j7Vo3eqC0hPG8gPIugXU7D6la/cqRaSzCcWsw6WCdlGLZxCrlf0sqYphlgi7xzvSjLoKRu0UdNyBee90JSmn4f0keOeAVtOFhvaV3vKEtFQno33mg4BYnQlQAnk%2b1kwUJZNASa17GPNuan3DnpE6PgqYpUFBL/KbXAYoVVpnmmJdaQacGRedon0X9pNULRjAy%2b8wzEM%2bTPceyBU0UDaZ6m5a%2brABQNiAQO2n2VQGdFEOIvKcVLOZmedmJkz2I%2b%2bbjmfgLp1jGJDTdpYjSZCvAL52oOEZDlNHb4Jmc3sYWy0TY/GrNQG3lLIEzHuEDjyM/TYDlE0QHTbYMIG5rHamrCVslibqPcvzyONMS8aouiblLuZsTtgxzKCbUjKuB/K6/N47Obu0OUR1YbD5WUNn8djykQNYaeeQwcCU9iBcmRrZ3G6qjzudSD2/0IQpiRbNntt%2be0vYtJ7yGXflOENgXoN3ks2QhLPh2UDTweSEg4kyUEmmcMDc2PKPfuXh79769cO%2b1mNP9Ffd7dAjv/vG1339o9c%2b80BtbnOygvE0mcfE/P6WOxRxh3bcgkPg3USJPCtD7LsFbNzgYvz/8t586oR%2b1CmAv2GjPh949FP3nN8sjnx/Z0wq%2bVK/6J0SuN%2b%2bdOUP9jtozyOXP1mf96enN2JW3kKMaEUPKOhBJtk6TmoNO62nD5qYdgXedTugWCVtAUkZVKlBi6GB2f05JOwGVtdnKNlM0nawAi7muXH07Z3A3X%2bauHFk%2bcPXXHvh0TuF1%2bl7L1x64tfPnf/vg/2JPcmrnYJR40kL6WQMjYaLXMZSGVDrdh65eBWea/ltvueiHvcZ9n6a3VBTpZsB3Dt8RbZttZ9TUnU9fn1SThMmneF1U4JkI65lWk8yA0%2b3I8F/EIBLDL6WznDHLll8yTip0qOZUN1pmYCcOjnan1xwaIkC7jLwS53Sn11tY7fM4pMyGcnOddPW8nnYP9q0pmNA2isTz%2bcLYzHDAJAJ2kwNMR8TJctRoFEPFtoY90kNKrRkJQoEdgKSdAw7xrSVkwjyDQPutI7frao7jj8o4kWCSFlNuwXJMggOA9OB7Eaw0GYdiZK2RIHaqFkPOm8n%2bRNtb4uXCJGzBOy/vl%2bzHpgyInlNWbeo/GSiIdrGHa8pBeO6xXWK36%2bM9ZBxITyYlQGl7OzEM4udWPRAYt6jZpzuRwJ306tdxldM0V0xW99lgMAzA70w6j020VN2U/aQmn1X7ZwFjJGvO%2bFzAvME3hMW6kr3biGV8m0iK1UPk5MNJXyt1i0U8rH153zkZ%2bftMye5XTjNvPM/Jx5y0XdosV7HimeLmD3dRZ3ADjHuEzXUKTkNs%2b9uXLURUwvPb7coiyptbzRdjFUcvOfYAWTnJLH7bHgz9gL%2bfCvu/dl3Lz9lZ0wsubn1stfjdjrgfsaXlp545WcOu7wwYc27bek4VoxUMCtH6cBagUyyUWXpDFk/9gvnmDBQ0nRczO5LK41YzMlg3cwk7LVNleDBc2yVcOnVr4nhos/cctIf71q18vnfb1/JHHqtVLzfyecsG7rv1v8d/N71p191/KHTF7047KFa95CyCkin0nCaJJfx/dqbDcfXtcdqappNLa6LeiyF/rgP2kvliprNcENzVLbfHbHgZUq0pIMTGNAyu0CAndYViyXk8zkFXOi8tJ6X9kGC/FSmDh4I6FZ0AJQZBMvnMzX3UYDeZOtlsGtYRlc6P0lvGKybQF/q/gnk0m9%2bGmbluTOmjos2MhAPC3blTo%2btLun6LNmhv5WsJmJ8FZaYqpOONgzU0zV4PbPFEigx6OmkDTb3MRlS89gw8G5mnVTATeiWJTNsAs8wMG4C2yiwaq5nTTs7h0RJIgKv/RJQqzXRl/ctSuldMwCMiiEwATI9K6%2bL0oSHxQPwtyDPF3V8VHlElWUnCQpfVx4bxYp3mq3pZZs5IKRrq/wGeoorSvYVVSd5vZxRUe5BnBSNBgIhPXlYIqNNacNDYtBVQ9ztm2Rma4qe3mDlw%2b5FxmVwvd6Ue%2b51XzkoUE0eBaiWfb17NR1XQJ5kM42GDlYljbsLWK6Hct1DtebCceIYelkCq5J44j8/87/nr14xev%2b2Hqx69DnPXPbKt7zsdSufbRz6/IpJZGbFYZH7VDAj4VvGJEo1WBSv2yDwAsRmJeCM%2bEGqmZSDWjOmNEa1SYAiBkqNBhYeOgOHzPUwNM/y0gMxvLgRVvEXdy64b9nk8O1XvWWX1r3XytnDfjsdcP%2b36x4460PvedV5K55uzFv6zCjKDQvTc7bquKIWqWGnfWjfrE60pKbcCKxQwiXLxcy%2bFOJ2BmUkURpo%2bgmXLGBiegL7DtpYuBeG//nzvz1zdB3u39Ezpc5f8s2hd75n8SmfPWPxFcUqMFqgOclJuJ6FTDpOM49oNlz0ZSztJOMin6gHwJ2cZLKZlGpUGMsT%2b95aaKaEgEfIy9OriFFev6GA/v6sAum5nG9wXS5XkCNdh2KJq8jl0vpvWp9FqUT/poN6QfsMzspheLSojgtmF0mKUCR3mBzWb6Bt/nnCfOGZLZeMOu3LgN7U0pue9Hy8WU95PxPgq3qaawF6Po7WSxae67RfLr67DdtESrcbeV1V7yneQ0t7SE6j7r/UOr6H9qdtF3arCWa2hd%2bz7MQl0CfJB8sGGODQvwxypDzE9IwOk9hIMBcG0ujcUaCetnXTLEdpoeWx8hqd7ofAhz%2bt7zNgnSRNDPLo3IUKUKv474lAe1g5cCItZoTl/YWBeH6RUWA7TDIUdh6T5ebzdgLMZtmZ4JyePcyNyHRlkYGhPEPS6bph0iqpMZdsOvURHK8RxrJzplIZ08F12/w3LPhYsvC9Bnpy2fYC0NuYdXGgybiboD34wA0JTRSb3qZ7NwNlZU6JTZghMNshnlWkvoHey3AD6GvqJERa707fVbPSVA4zpHdXkpk60ICNMgWrVl1Ua/5UfN/LUrjua7%2b%2bJD9n4PsXnn3kY5va7v0l91/09p%2beduz73vqeRwru8WtWF0A%2b9vwuFMdl26iPNZDN%2bsF7tZpPavKiHGdG6n6QqpYfUD%2bw7kUHBx/Uj1csTiAHD7GUhT/ZwLQf3nLS6hVr7r/9hg/vAu5b8UXvdMD99w%2bv%2bsG8Wbu/76nVDTz83Chm5FtBqbJc26YXKfOmkHqRtt1kFCeqLmKWhz1mpgE3hXXTk0isdRGPuVhF660Ejjwmhs9euvqaDUv/cMG2PjLf0jpGAcCf/NhBC/c/7JBvHzwd8zYMl1U2Osp4mtWg3SHQnrdQtXLI2TWltfM8XyZDyJjsHzfWXExLAEUNrtlJhZngYrGMfD4bDt6Dh/ABfujiWchmbAyPEqj3gXyl4oN6Pxg244/ULEuD%2bUwA6n1w74P4FpPsjxgoAKpYarcgo/WKpS40VfUJk9X0Uu7SfpJ079JXnpNK8Xk4UJV%2bS5kN/Zb6egbe5vWl/JHBPltt0rWo81PHaqkOHS%2b18JuSCTZgijVyb2P2RCduMsrMutO1mdnkoDwpJQhjJemYThr5MOAWBqZNoBcF%2bk2QyeUtAS93pAzm1OcgtOx8jBqcEOtF2lyyqe3zB1zmOzA1ydKPm8uHjmHJDZ1CAc1c9CDFfF5pVxk1eJFAudP%2bfC%2byLkZ5mJsuLHQMgfReZ1CUbEVMsUq5kHxX45MtNx6%2bF44RkTMv5rlM9j0A4YZnOgPvdloivDWQoNdkqEMzj4aA3LBgU/4WggymjOhFXEqYvascaMskTcHfdGJxrm6OMHIAzyUQ6mbVoybfLEV24OJ2jJxl%2bF6JfS4n48jXmihT0ryy7zBTJ/CesED4vunZKJU9VMtNTJZI55bBM00Mb7zv8e//z0%2bXXbItB6tSJtV/vPQD5978%2b/qZFGy7oVBWAbjBe6WXGYuhSUmYiJwhtn0w4Qeq6goftCdUrwjXx4Cx9S4KfTbe8%2bos%2bvtspHaLo7Qv8NCnf3f%2bMw8/fstTv//4rmRMvXTuPe6zUwH3oYXXLvjRte%2b4qTzpzBuZdDFarGF6zvIHlAS%2bdKGpVL/a/YgqLknASN8egKEkQPantOTJEpLspBouZvVlkEl5aDSSqNcbGPcySNlEG9LQ00/s9MkzvnPchsd2fCeZq3%2bz8ro5B%2b758jfvYS16brWDhF0OPNhTyTgcO4u%2bRAl1KwfHdZGL1VugXb0PD67nIZtJo1SsIJMjwFwWLDkz4z6L7rPufrdnWVYr4EaRCL4sxmfWGXhnFEAP3mk2o1h4BdQ1I09/0zpaZk4ntr0F7uX3RQB%2b9swcShVHXYfAUKHgM/atxUKlUkImwykt/XuVshrTdz7KQ76To023wQANHAhomyBWsfPZuCpB6tA4CIx98ZUeVATN0j7BQsfqbexV778HnwWmLLK9hCa0dc6mMNcIam3zjZfAgP/WNyfBPwP8MO942p019BIkm5rjKB29rA9hgYyhOnUjgNVss1m3LFlc7jz5Hhm8kxyPA5NV3I0OJo5y7pAMvAS5PPDh7Kp0T2HSD16v6pEOGqZ1UUGYtI1ZfAbHYUG25vFcJmHxCGbCId5XXieQqKiPrV3Hz89A7b189yZDH8Wih%2bUYkDNAbcmOtFSmW4cbatfYJWOoHPBO%2bWzYIUo7Nk1hxPUBgdZdfmchmVIjmfKIZG3qc5TyGrrQZrLlndyszG%2bn028J3Ol78plmoJLyAbuK6SCuhlbH/Lg3xbjXSDpjgYj2bIrBu4PJogenP40NeQw/8bvVf/z8qXtu05nQz/rqHSc%2bsXKvs/Z5415/%2b8ify0jarvKyVwtp/EcdxAeTaI7WEZ%2bdhLexjhI565CdJjlcEVaieIBZCXijVDhAcdRFwXVw4uunI5/wMHNuwhudA%2bvZ6zbeOqfx5Le/c8Hf7BTxfJtSD7dk327tyJace5s7dq%2bjf3rait%2becvEv/lAYHB4rK7/wZMJWGU/JxKQv4d8y6dlJ4xa1UANCHzeB9smar%2bmdlnQwjeyVkEG52kTacpSbTII2zrLVyZ95cvKeL58y7YhtrmC28g1d8uPHz/rkOw46E8BrVq0nwO4q0J5OJVQwaj5rwVPrKAA9qwJSXZeSMPtLPZFCslFTx5H9oz/CZy6KmW8Cxf5LKpVKyGaz6hoE0uk3gXn%2b7ctisr60Q4Bz%2bdi8Xv5LYH10rKzAvL8%2brf7NZFqgn7fxOh8A%2bxIbqZHnwQNdk3X1PjPdQaPV6b10cMoJ09hLQB%2bmrTflNuR1T9kFpdRGauclcJfnZqtL/734dpWbwsDLaXt%2b/KigVgkieJDAgLVbwCvrvQMQL5wnmIGn60sJQxR4lECd7ikqgyWdr5OOndlfM5qCEyjRvVapbcnG0eePL4NFOfmEhGFEaYYZTIXJReR5mYXndWp4LCwo2cKTZ2bks5txBywrpHPJgGKWkYSBdjlw4vchzytZb9NVR4J2thg1vzY5qxGmPTftNcMSg4UNrPhccmDDoL6TdjvU37yDpWLwjegPR8jIg9cYGkPSwc0lANriumGxKWbzFJmsTe/4Ugab9tKFMWDndomDd4lxDz4dMZBh5r2iPd6T5LLSaKJet1CjfCOOB8uyMTZeR71hwx1I48h9sP6tn3nq0pv/7eBt1mlmwbHfWrD/YQvenF145EVPrCwjRnlheXDIgn8uUNuCM16HTTvwrDWTnI6Wy5AM3gNGCg6O3C%2bNaTMT2OuApLfKhnXnvVh9ivOnG%2b684/mdxkGvl7q4pfvsNMB9yak3Db3%2b6N0%2b9dkPvfpTN95ZwIbxMhIxG3FiqrQvO2dEJVmMqqOCvqCGizutHNlA6h6AtNcERjOpNGb2AQ0niVrNQQEZpD0XaywXQwNxHHlIbPjC/1z/8x98YrcdOpvY9AP/Y8F//%2bBN573hlXu%2bb7jooVYtwnUtZFJxNStBoN1p%2boVJjLoTJ%2bBOIN0H7iSUUWWrGwcGwiRbIbacWHICybQDa9MlSGaAzOv838R2%2b2y6BOb88bRYeNK2E6vva9xp8be11hEoNwG/eTxJfKTEhP8ul33G3we1FcycmcPwcEnp40dIO5/NaL/0TmCeoUr3Tz8qSJaODAJlXZ8tZ5BO26SWni0pzaBY092G74YZd%2bUxrxl8WRaKgc%2b1JB3yKTo9WZgFnQnc6VxtsiUprzFZvw76eTPglQBglC65GxMcpoOOAqjS4lKVS0CD%2bqCc9ew0EOL2iMGHAmziGcPkFFIiY9YelsyowYMYTipgqy05ZUAk70fnkYDXLCuTkZeSEB6QyGPofOYsB8888LY2sK5jHNruUY0MWkGUbDHK4N283yjtuRwI0CmZlZdBpmHacul%2bJKUxnMBPvVr9bsMGqvr22ywM1fuNYKqjkqJFyVq6txzh1wrqV48SFXlff23QLt2x%2bPkJsKv2jRxmtOyPQD17uwvsqnzeUWmi3nBQb1hIJYFqk2ZMfcOFjWMumo6FvaencetTo098%2bXM/eveqpdumPOTkD10/tGa1c/wef/fO74%2bOUybVAmK25WvWtU8ms%2b3N0SbiM%2bMKEDljzWB2QhEC2kmMZiUIB21Y18Re8wZwwFwPB81PeskMrPsbgPvzldfcf/MvvrlLLtPLl9fbPjsNcKdAyR/%2b7BM/HHm6tmT1hioqtTqSCSMa35cyq2RKappMdJxURylTKoEhZoZpHyLUG46DWfk0%2blIeJjAdJQrwsz28aDlIWTYGD0niDVk8seTtv7zo8VtOuq63V7P97UW69uNOOOBTX/jIqz41QckqJjx4HIyaiCOd9pn2hp3znWFc0rT7gb39cbLYAprxFOL1CrKkMdfgmeQyDGUZeDMYJEhlAnfJqtP7rFQIMHPAaUsqwwBaymckYGeZjJTM0N/%2bPp6Q1bQkOD7bzoMK3hdKSsNSGwbto6MlBd7pX74HBvPtAwT/6clbmNj6bDanBwatWQjTNUfWnk5yHDOIlvXywWBD6/SVjEdo9qXXPPvUBz7zFPyqk0MxUFcDAh34OgVgC9vJKFAvn6cTgIgCrwoMuf43bbqvTAE4wq2DqThpsWdq4uncJtMstc5hAZ4mG03Hm6CWLRv5/jj4lMuCBzOqjMkhRgeadmR0CYBm/Gu1gXvDLUSCT7peWEAkg1K%2bH54xkACZjpPlFeWuIsG7tDbkc4cx3Xwu7sTCBitmKxplKdoG7vVAJUy2IveLklyFtdzmueQgKNCUy%2bBL4z11A81tMpIOmvQt7VU21Ud9im/7Zspkou6bv%2bVguxh1sgRGzsb5bX4rCdMgyWAJwOv2jb4jAvTEsiudO8ln6k0F3B2ldwfqdQc1sohM%2bP7upZKnXJrKdQuNpoXdD0nix1c/ckkqnfr%2bp087eJsLVj31nNuGHnro7sHpS86/eWCmt8%2bGUkURlTa5t40SjQ4lkWmO1BGnYNQxXyccm5WCs1GDI%2bUc5qqsq844Ja0CCsMOyjNt7J3J4riFMeT3iuPeUaD5%2b5FbX7jrgevvufGEHRb7bOl3tanH7xTAndj2ww7vn33Rx1%2b/7Nd3FbBuYwVFx8O0lN3yatczzeTHzsyXiFnyAwBTLeBO%2b5BMJm27sGM5zO5vII40hqtJrI3XkXKBuGcjNZDAaNVeky1X7/v5dT87e0cNSl186k1Du%2b%2bWfs3VX3rjz6dlALJ%2bdOoFZFNxTJYayKQTcO0s8vGicpChINW8yoxqKZ0SgRsC8zFiMJIZxOo%2b490Cyib7XQ62c0ZVCcxo6NVi2X1gzUCcPxIJyPla7DZD4JqmB325jn%2bs/1tBwCB41Twv7UvA3ZfU%2bHIeniXg%2b/GDcH0tfqVUQTbvB8IyiCeQX676dAbdx6yZeRRLjjrP7Fn%2b32SNOTQ7jw2asad/aSH23g%2bKFT1YFK2nyjcOAty0cNCr6WYjE0hN8aJnlyWdwdW0pAyywHISKe06Y2aC5Syy7YG%2b7exvG3iPYh81aIli%2bHy5lO%2bo0hr8tTebis3Wemgpb1B7CUmNZKnb9MyCBQ5jeU35ienMEch4KkCdLEZ1Q8SWmxyjIGVJahwcwbibnUJY8J%2bq1aH2IvroLsHBtBcHBEd1QjKImPaRMhRT2mQCZD42APU6uJMHBr1YB5pBzVOCJ/nGxTvutUOVMRdcllMcV6JOJoOxBZvdbZZJXafDd9AtCLTXZ9ta%2bwUMfI%2bMfbfrsjsMf8sqNi0kmzQPeLlt4bZBzizRKxhpArNTUMCd6oYCsxSsqkE77Z8i6R9p3WuuStrYIMmMG8PoRANVarPdGKrpFJ4ls5rHHv/ctd9bduO2GKy65NRvDrn9b706d9Qef%2btNNLG2WFG21apsrBiaG%2buIzyIXDmLaKYENs5ikE7YQIxaeA%2bG1lKY44cKeYyPXyOCNr7aRH0p45WmwHvo5Hp7888rf33HZvHO6vdNd23srgZ0CuF941SPzR4ZHjrr8/GOu%2bPGt4xitVOBZMfVhEhgv1vy%2bkVky0q4r0KQDUpU0hrTJOiCVftMyUQWmpRwlkxnIuFhRmoZ18Roo/DDuWhiv29h37yRWPrTuxgcfW33vTy96zTare%2butukTvdcFld83/8Mdfe/XewCLStcdjOkCUvG/hqgBUAubkl57q60PGbslj5FmbiRTitQrSQtZC4JXfjQTbLeeXljSFzuW7wvgMe56kLjrANJJZJ89ayr%2blCWz1UfCXoWZYfETTzlC2aC2l/9MLAX0C5gzgVeizPtdUHT0z9b6Onq5P//EAI68BvWTfuTNnt5ZcLqYYewL9tLSkNyWk0zRw8HwnG2KRKmUdHMs6L22YY0S0yYRSdE5TEy/fFwP/IMurZn9lllcls9EuO7Q/L6bVJFtJquLXZWayzEEQuWbPlWc8l30Em2zW2iksnQGAGABLYMkgr/WeW9IJllpIKQTvZwLSyABZQ9ZDx6vZAepM9cnCvPWnZKrV5WI%2bcxsjSxsj9pPPJwcpvD4yODGI7Bcvw7Tz09eNbEXMrJub0Cj1KsXoRavdVgbGPYQNsiTzrph08Zxh9xUpaTJAuKlNnzIz1CEgVN3CVma3e30dHSVvXe6pdyGgb4NKC38XbbNpRv0Oe%2b%2bynef%2bP0hqp4H7eB1I5%2bMKwKugWj1j51LeEZLNkEUkbWt6KFZVWCtGRl3M2C%2bNB1fiiXXLlv3qgg8c8uley%2b4vtd%2bp59w0dMc9qQ%2b884vH/b9nnq1jAwN33fC4loVkoYp6X1o9M4F3xa6P1hGb7v/LOVJi0xPqb3djHdWGi1HXxgmvzOPl85PeBhvWkwUg%2bWDh4foffvmmm294zy5byK3wkncK4P6T3z5xwvLStHcf9Yo573/q8QlUm1Wkk7aqdwTO%2b8iTXbjGtAQIfgmbv1Vj4QGpmK9tJyeZuJXG2loCfXDxQqyJpGshbsVx8BviKP7iwUs%2b/W/3/ubP933sf7fCO9vmTvGtnzx%2blrvbgUd87HDr/atHPbiNIlKxmOo4FOhN5OFSgWlpTCIFZIltFwGpbQ%2blQL6/SJcX/s3st%2bqcBCPOL4tkNgx%2b20F1q0eV6zsVqMm4tzp1n3WvVPRoTm/g/aUunoGi1MtL9t%2bfVWjNIPA1OBCWftMgRAJ43yWngnS6PUpRdSwqWVUNs2dmsWGEnGx8XX67xtmv1TJxFF%2b3PXlVe%2blI2Y2ZUMosx7BEUjQwYXadWXeW0/DAiRNZmSBfzXrpQQi745iZXzfn4zA1wvIcJpMqtzEY8LvrlqY6TEsu10kw3%2bn8QeMjWuk2dx5a3wWAqxpvALwp7j0mYDScSKZIRkKcQSSLL4OJOwFqCWC5XNuAr9T4i/KlfbuWW0hFmBLk3CHoU95bWKCzefqwGYOwWYBeBw5mnYwcMP2VwDk9f9gAmFnwXiRvsgwZEHeKgTHLnNoJNQslZopUbI3OBNxmkKPrkt9u%2blIZdufi89LnlOtrrVfkM//nQcllaKxAiZlI112v%2bXr3dBKou7ZKKFih5ExlB5PlGGbkUrj7%2bdEnLv320oueueVN25xMZP6RF71x/sc//ZvxER%2b40zOpWQYbaGx0kE76o5UGgXcam4z50hnfIsyCQ3pYPbNLYN4dbyhDhjHbxqw9B3D6wQ6eS8dQJsvlQay%2b9T3fefOyXbaQm9NFTTlmpwDuX772nrPe9s7FZ4w%2bU1/01IqN8CgzWNz29exaGsN6uF5KlRpfEjIk4GJGXwbZhIeGk8DaRgpJuOSOpOyk3Gk21lqxNY/e%2bNuPrluxYZvPqtbLs5v7DC341oI1D//9eb981DryqP0wb4Smy%2bI2MnZJBaW6HhIbAAAgAElEQVTS/LsbzyOXdnwg70EF8VBAque1nGTM82YyKQVMfbDWkqqE3SOBZX/x55yltMXcn/YNA9xh5%2bV7oG3%2bPVTVbgSgKTCWGjgfbPp2kwok6YFEa5bAZ%2bpNQG9Kb6QkiN1rshSEq51wKCCXXXHob/aQZ42/aXfpy24oqNZn3WWAKN37rJm5lsxmQ1HFFKj9dFEqUM6IVFps6mBW5RcfMPVTeTLJ2rNu3mThZeAr204yIJCSG9rGHW4YY%2b/LjjonIJLvNywbrMlumkCsE9MctW8USDNBrjHhwf1iK8BSSwskmJPX7IVtNuUxuu%2bdcg0uJ7m97dsIkXWESSDkJ2k%2bX3AN9cG0zh42oKGtYc/aKwBWl5Da8Q76b8Z/UyQ1%2bhY7DbhM9x5ZZsGgTQyIenpnWwGUh4HrzWnn%2bbuU7YgCyeR1Lk44ZVbAKG8erMv3FxY4GsjYdJ8Rds8yN4dMKKf%2bppk9HYCugk81oCcZDEvONjQA0rhLKaB6zpAKS/OEk2SBSL2MtpC0yde97qBahXKZSbNFZKWJ8ZKDWjKDffM2fnjv6huvu%2bK2zz//%2bzO2KS9zClLtm/HuW0cPxyH2mjpWry74mVTVZ%2blPLVAXkGLmncA7WUTOUKXgW%2b%2bRfeSw1sKPN1SwbjltI9tI4h1vSGJN3sb4pI3ai43VD19%2bxRlPPrDjW2Fv7ve1Kcft8MB98ck3DX3ls6/4yN4z9v3iMxuqWL5mHOlkDJTanT5ACkRlB5leOwMqtLrSsLuYkSfG3UUsMYBioYgMPGxEVgGu449J4mt3efekHr/zI189%2b%2bhtLkhlUypK2L5LTr1t6Njjcqd8%2bvTFX7CBwdXrS0oSk4qTFtxPpESANa8yo2ZVgACVcT5eV53peC2DackaB6dPuQSDbNabR91vr2DcB%2bIEuLdetfdlMWkVAEvPxqw4a%2bWZkTdnBgLG3wXS2VTgdsPBse3nyQa6eX/g0PKalyCeNfTFYhUzZ2YxOkq6fJ81kfv5unnSwvs6%2bmrV19EXCn6QIwehKolMyVFT0hQUm8nm/JGKAPSm/Sa/IzMLLJ2LnGtkUKuZEKrtuobkhoF8y6FHM2uCwWe2TtpPmnWGnoX9zk2rSn/gJVGIcCeR2uMIIChZ4CnsrhEMGlmXJdsdxmwbYG6KVKYD2OMYEPPabdL2ELmGlIcEJHgISy8/qzY2PcKH3BwsTSkTIZ0JA//BNTpoprvpqqcMYLTfeRijH1SNEPDPQ9e2suSYg4i6Yw4qtrQ9jgLXalDcyaiqhwur2WmdbZe/wXbpoM/UmgCaZsQk2KdLSa15WOCoOasWFo/CDH1UBmh6H%2bvrwFCq9XAqF0U2jg01YCjt3ysFpXJ7pmQyoqIFJAYFZv5fDhYC7gTg1S4qY7HOqpogj3ffZYZmli07hrGJGgolG81MEuM1D%2bd/8ken7zs3duu2FuN29Nkrf/Gqk/f82%2bdebODZ5yeRmU2zCgTYqcLYSE7UUJ%2bmGXfSvc8g3bDfb5DfuwpknaGoSiWnoaOqGRt9bgbvOCaOibiFat7GigHg2TN/dvoDt75tm5t56KH6b3O7bD0Es809mn9DQwsuXbDm4XPOe3y5876lTxUxVq5iZs5P40v%2b7Wr0rD9W0suSfp3WU4MSxoqwLm68ZGF2tonpA8RoplGyUiowJmMDa2MeqKpPG4rjO5c/ffmpx3hXnvPubS%2b6fEtf2fR9/9%2bCFc%2bed1vewyBJZCqTk0ikbDUwYu0xWWX252NwlQWkh0ac/NaBfKKmElNRA%2bG2GVBPvSsCx5LV9vfw1HmIUd7aYHxLysX3bvdgUw9gfF1hAwwVlOv4fvW0sGUkS21MSQ3tQ9uktSXfb0taQ8GxNcyckcXGMT9pVaFQnuJsQxp4ltZQsPDUxVKgni0sTfceEygoIKLPY%2brk5bkl007rpaTGBO%2bmvzz7yvMAQLLxPD0fxAEYaI99xCl4Nwy0R713E9j2ZYECs%2bCGGwudw9Q5d6pPoRroDuCbWUYGLAUCH2k/biAKpAZSLXKTMUAut2fq3YZopk0muRemWN2L/l%2bUpCVKChKl/458Nz2w0pEBnOYgyXDgjJwpMIKAOwU8d9KZdxtUbGo7FHYfJH8gZkSOR8POG7zXEIbbBOh0PNdDPybHD/aWkhWeIWN2m%2btrALQ9yobtf4eBA5O%2bMZkvglYFGnaawNU6c2bQ/fawqfpx2sYWtFSvaR19H3SNYH%2bdWIn6ajlPqF0QW0WjZxalfI/gaTUZV0Rzo9xULiy1sgM7TjP4QKMOUHxqYBE57ioDgsTMNP63jjWln995/H33rh3elsD7olN%2betoJ17z1q0/f4sx9bHkRyTiQLdVQ70/7Iyz98t2NDT8p0wZm3HVRqeAw/bFbMdWb1%2bsu1m508P4j%2bpDdPY5pWRvOgcCy76y%2b5nvn7LlD22Fv6je7ufvv8MD9khsePuud73jlGeufaSy657FRWAkLMcvXt3Mn6/d6vvwloy0iy7VW40Sby4048skmyrU4MqmmCsKYOy0H226gUk9jEklk4eLFWBNpxJCybQzkLXzytC8dd/iRr3v05quO3aGCMuYvuXLo/PNP%2buF7jx1asnytA8LlSauAdDKhgCh1wNRZ5LM%2biFdgynW1b3vVl2R4UNOJ8QZJUKKrIgH3nEp%2bpKOIlTab2XMFHze3/rcdx43/VjlZyEl8SY/VxvgrZxAtC1JyHNKyi%2byupp5fAV1tScnBtrSOBjAc3EoFSx2GHARw8KvM8sq3yEGzLbbZT2TFswZ%2b5%2bgDeJal%2bL8pANhPfuXvw1aV/iDAZN3DypWdbMICYCX4Z4Bueswr4GAEv7busdVpc9ZXdV/aR76NXedgUF2VmBUMC5YLC/Sk805xEZGyEm2LKF1QNtX1Q84WtOIm2hNcmUCRwRzFMsgBCL8LPicPZMKAJoPwXkE7n7vbcWH3o5timUJjq3yOUZKRzQ3gNO89TH7Vy433cn1ie2UQdqdryefUBiFttyEDOdUMjG8iojIc0zdC/1JdkfVDurJwJWJ9OANz9cWLsT%2bDcQbqnAfCbyeEq5MuSDofHcPno/3outSG8EwRx8bwvfF3rkA5Mft6dDJlkKCtaBWAp3MykCe2XS/crsiepC22jRh2Mj4g4E5sM%2bncSS0SI3KDbCLJPQyBRWS54qFaaaJatVBzPRx2SBoX3FC6cfKp%2b6657svHbjNZRBe87tIFx3zn3OteeACHVibrWEtxU9p8I3iftg3bsnynGWbchTq1uaGJ%2bKAeuFl%2bXSXJ7MKX9WPBAgsHzIHnzbat/7n6pQ1QnX/yTUP0Oh%2b7%2bS07FNYK7Td7aVy2532uumXFdW8%2bZq%2bjHn%2b4Pm/Z8o3IpCjRQItLkUFj9KEScKelUm8H7gTqaAKpVCe/ZA/ZZBO7zcyg4TTRrGcwoYH7CzEH%2b7gxbIxbKFSdNd/%2b7BVvWrX0k9uUtm1L3%2bfFP3pifq00cdQFZyy%2bYt2YBadeRLPZVJlRm/TVJvJqNo3KM5cooeno8hbAfaKWQiprI1WvwFGtvN9khgGlAJEqWmTzQXo3hUyxVEc%2bl5zixhBGRm8OyCeAbgazKqBiIkjxgqKCaJnZl%2bBd9Z3a0YZAu3TiIZbelMsw2JdF6gfBZvxRlz8xJRbOWqulOmqQwVlifYaLkmoFHatB85nZW9uCw4T8Rl6RO2Nm2lUd0dWJtkn9fJu3vAYH9Gwyyysz%2bJwoioqegRBP29M1pPWiDLQz6ydrx9uKyWBkozTTplNNp%2b9SAmy5XydZEO8XBVq7yYa6tRNbUz/d7Vrdtne6F6mh7qW8ul0rbDvLRDrZjEadN7TN0zu36b/1N9JJ6sXXkFKSYJ0FcCyJdGsy5SYS3EuwHOb6xOc2wbJ5TtWnEjOvg8vNcuKmXQ7M5TdKx8tvgO%2bF2y4qQ2bw/XawvbTVAFbo21XskJGXgn735eNY3wCGEv7AgUeQBNjJ151i1yqpOBLEumur1njCQrXiqGSONMgapzwArodC1QNx0OMFD%2bV4CiNpe7hi4Y9fOfP724ze/eRTrx868ZPv%2bup9j1uvWp9yD33x2Umkk0Qu6VkaC0gWGqgPaLmM8naPtU/haIKCO3Aq%2bpHlFcxZOIQ3HWoh7jrYOD2GF%2b9qrH7osu%2b8%2baktwEMkfS5hA4afKQx%2b76q37JnLxhY24WL3mf0L%2bJ2v31hc5lpYesxh%2b/xqc77l7eGYzUdB28HTUUKgu2889ZJHH3Het2LSwcoNo0gmY8pFhlAlO8nIb5ySLNFCQav0EfJSbVDQhod00kGjSeIOD7tNz8AFAfc0CkiD0gpR0qXdrATseTE8%2bcjkPXf/952n3H7DjjMCpA/npLcMnrKyPuOIyz%2b4//tXrHEVOE8kY2g2aVrTRV%2bOBi05BdzzSdK9%2bwVpuQ6a8Rxy8WqQHZUY91S9qmY7qFGsJdNINarK312FxvC6ekWx88lGu4tLL9VQDbooeLHUQJ78P1UjTyA9hWKppsA6I1VP6/dKZX9ff7%2bE8p3nhbLMFYr%2bcaEKk15uSuyjAL2eTZDsexjIN09tgn52qCE23JfZ%2bK0qOcsQ2I/KIiulN2pQoIE7affzilnn7LHtA4BWAizVXfozCgzgPZ/dNt0bmImX1sBRkya0L2vjA1ZMAHdTO0/vWcprGDBIsE/bmc1T33q56c8Ki9aQAYZyqNA2nbSvZAsDqUOIO4lkZDuByk7bmFSQoMYEM7I%2bMHu6KeBUSh46jB%2bn1Gj2zCaWlpYA7CmERfKv1iF%2bcHb7bx4kme4jnUBs1GfVDTTTdimtkOcxLTZ5pmVzGPSOgweDNQ/aEsF2h703E6yqmSMCnPrbCjuGQTsBZR7Mqu9EM9j8TTCI57JpY8KFJStvlxIW3jdg1A3/dP5uJNhX74GzlWpGXQ2QdcI2As3qfLpOyfs1dfJcfnx9flbaTx4n3zVJXNbX/IBUZuk5MFW1AwLIq/6K/qfbGoYCCrhHsO40S0ngnfpBAuvUPli2h40bXZRrHqqZNPaZ5t7%2b2Sse%2bc3N25A19NHnPH/Zq96%2bz%2bueXuUeumZ5QQ2QCPv4QapUBjEkJ6uoD6T84pBZKEM%2bSsqiWqx46HeSOPGtWSRtByPJGF58zsUd515w3AnveP%2bjV311QUdWnPLClEobqMHFyW8/cjb5bh5yQN9eTTiYPXcO9t17cOGyx9diyaLdF6wfbSCZTuyzRx/m6HteV/a8py%2b99umLLvzQjidRDurmJuKM7Wb30y68%2b8RrPnf45bffX5/3woYKqo0KEjaNgdsdM9i3nZIv8aI0cgK4%2b4y7X5FJJkOZUjNJB3ErC7fWAIWlvhhrIOHFMDgQw%2bC0%2bPBnvrHqhvv/fc8dKunAe//ljhOv/fLr3lWA/b6R1Q5iThFWrh8Zr4xGk6QxltY5%2b0C3ZflIMpmcEiIScCfGvT/V8IFzJoVaIoVEvaoKmUF7LZFWoN5XwnNP4qOrKM1mGKvOIJxOXq7UkMuRzMb/lxb6O0sBosUasmzSH1QEylZaU9pJntYmfSSBdk/TwVuLke/0YTGgNxl4CfSZLZd%2b8ZxEii0hVQdVbsleWgmnfMccP5DVZ9EJ5FfJMkEsvrQnjUzaxojI%2bBpYVVLsSJEyweYCvbtfxlUMDfoJo3ymvzUQIms2P2lUcAv%2bnehdopj6KL95PpZZeqlfZYkWBaVxBx%2bwcSKQTiaOovNJhnBTAC5LVbj%2byLLkbVHBdwRK%2bsieTpQNA3ezrvAzqkGOHmyo7yTiQ5GDAlnWYceEaZwZHPrvtuXUIX%2bzlMH04g8LKDTlEAyg%2bTkl%2bOdrt0k4Qp5VNd%2biDefZF/5eqa1Ia1kIWQuq2RudSEyy2vJeosqiUznzIMW0Lg2bRZFAPCoAk0Aqg24u4%2bDT0Q5LPMsk3ZpoH2o9JWiVEjT%2bXqhM6J75Pcnvg5O1qW9C1DPeh9ebOnXpEiUHE1PyPRB41wnh5CwbP0ebnl2/K7qmnFVTshk92A6eQQNz9W3ogmD5TpCAjp6JgvNpgKOD9E2HGapOtqtZd7JNLDcRiwPVkgNymYnblFnV17o7TU9JZ8gicmLcxZidwtyMjbueHn3iy5/76btXLf3oNjET/9q3/%2bq0xODeC/uPevknXlxRQNzykIirDCStflYFitu%2bg8xslhhppsPoAMm1j3Tu68Y9/NNJA6jkgLlzbdz6gIu7z7vs9N3267/1vps/HAD3xafeNlTasJxaEgXS6/UiDjtg2l4H7b/PwllD0zBRcA94cJ11wHsPVZOtcwBrz4Do0X1ETXcfVN7ceXz%2buw9c8qW/X7TNeeibbffm/N6hGfcvfveBiz/94Vf93W/vq8576oXxQCbDSZfyOvkSF5wJ1mWBUiNfacZ8MGI18bLZaXiu792%2bPtZEimwgXQ8xO6YybGZsd/ibX/3tpx69dcdJ8zv/5OuHLvrX429euHD6Ps0Rb3DjyCTSKaC/PwGnCTRdF%2bl8Hla9MhVYk0wmmYNVKyCToch0D5ONFPqT9cgBvGTfGokUUpptL5ZbkpagY1esuhWw6i0mvUUd%2bZ1RDfk8AXf2oKXAUB/IK/Bebv3LAJ/WK/Jfs/GWaM1ZXsMgXvUJmt3PZbkV8e9yS9j5KOccZtwZ0HNwqA8w/M9b2lrSb05c5Sdn0mw6yWOslhTGZ9hbFpg%2bePVtKNmuko/lZFMEzn37yfap6nZ1E1%2bjlTSLAmfpXH4ha5ZeM28BUAhpqaSGnll99pln0G8Gu6rn1w43DAxMW0oGQzy1z2DUBNgM1gj0sXtGlG7eBKJhgFSu4zJjQML3SPvQM1F/pZ5fZKQllkw1T/TOxTYuCwmYA3u8cmvAxDMREvhLAMfHE7iULLZkPfm%2beYAhAZx8Fronee/S5lM9I/txayAq7z1soGAerwYy%2bjwSYDIza7oUMfCk%2b5L787vnMuH7CpOamAA/quzonCYop2ei47keyWO5XvBzmzEcPMjwv22/ThB7rcLkNbAx2XfJNPPf5jozEDwMcHM5yPccaM8NKYq8DreT3FbIwblqa0QmZp7JUN%2bfgXLk4EIOHvi8wTPkfDeZXKMFyuXz8D2P1IBZxMjr9ke1H6LtUbNaWi7jal0%2brYuRe4rWuhPXQQCSPq1k3Abp3SkD8njJl8zMzdv4yb2rb/z8qXu%2bbXNA29Y%2bZv7rv/vGAxYdeFjq0CMvGht1VBbVtJ9TKViCGUSWxdgWmpRqlpJNziJc1NrXJt3/ujrG4nGc8OYB7E7JqvJxPLzaxQP/8fjl716y8Uok8%2bqAaf3WUZWyu9/Rh%2b8255jD5hKTdjiAPdsKXZR/rQFUtURSdxd%2bf6PruhpY2cCA6rK9DV/6j2VLLjz7kB3O0W%2bHBe4kk/nJTaf%2bcM0j9SWrxip4cbis3E7kIoNPOgVeUWUg0G5bLhquhWysgbkzMxibANxkHmtjDSTJHlLNKtmoDSaxbmn12aW//tlR21IE%2bZZ%2b8F%2b86pGLP3vmgk%2btWOeiXi2g0fAwbSCOeCyOZpMCUj3kMraaJm8n%2bvxIVWIdJ%2bpJ5JWHu74bz4q0g5T3GzQiIYN8Aiw%2bC57y3YI0m07XUAGtemkByFYWVL/B8e9WAXTNwHNnweCdt0tgL4E%2bX1P9q87Tsk1kWQ6FP/NzbwmIl%2bUyVTcfLhZnQC8mQDUQb0lgWvIa/wpSPsPBqWZiKZbmsEUlHceMf7HYylzLoJ%2bywbL7DQ8OuJNt3aN/fQ6A7cXLrlwmpx3KHtvyopflJINfCdxLcCbZQO7oJRMptfMMVJgplFpa1gPLdWEAzGRV5X2aYI%2blKGq9ZiLVu9EBtvQ3tV0qTbuWCclONAC5ulrINo%2bBTr7PZzmlxEgCMpYu0D6S8W8fkGkwr8GaYq81eypBWLBOgzAeHAVAntxJtLTN1E0TE5oxWFY5oJGDATqvvD81U0TXZFcSsv6L6P2ky5Gqh7psqFzVITpuQg50/PramnkwBxf8jk3QzXWf74UdWni2RV6f95XtmTkA4W0q2FPXE2VzKJ7VBMn8rtqkIjSA0ZIVMyBc3hMdKwe4ksVm5pv2l4x42LfFdVoOuKl8JdtPs0lmXZL3EgbcZd1lxxlCpOp70Uvw/JSbQtYJ/Tdp2nN1f/9SMo5crekH9dLsOyVl0i4zBN5r1aZiqwm8kz1kKkXSGQ/VuofRjQ5iloWJfAZ77Yfhfzl/6SWlVWu%2b/9eW0i459cqhEw6b%2bZrf7P/Wn2eHG3h%2bpIR0zNe5d1x4etvzZUGBVJJkYZRB9vkKFi2ehb1nuJi5Z8LbLQZrfq6%2boS9VX7nvnPwcfe495TWqsFATygen5sBO%2bZp61UtztypGcKrOaJaP3h/NZNEpZqeAL16/4exb/uv2G%2b%2b7ecfK2LrDAvcLr3pk/r%2beueDmW%2b6anDdW9DBeqSJB0dGqp/OrirITpAQMZAvZoZKSvj2XbKjA1HisgZjnYe6sNEbHUohnk1hr1ZFwSdtrIdmXgBu312x4cuV9n3/fvG1iRN3l8%2btpMyVauuaa91z1pldNX7RivYtqqaDYhGTKQjIeV0GpyuYxa7VcZNSH5sJL5GDVi0oqE2sU0IzlkUvWMF5LYyBR725Vptn0MF25kjDZMQXQJdhmwO4D73qbPKZCkcd6UYMNLZ3xV/HvBnK5RDAIUIw87UeyGSG1CTqacvv6MAZfdU7ZlJLekJ%2bwZI9eOiDfer0S5NNzB4mehEtNlIsNg3HTplJ1esoFhzK/%2bomoJJhvSXF00KsA9iyXYYmPBO7k1qDeBsntucXWj%2bI75lBGWB%2boq0/a9qd26X8OZenVC7Py/NvUustpedrHBPGSiW0DARqUmkBWAi/pR03nJvCiLOu0xIBBOoFz87pqql/3RxKE8oDD1OiTpCaQHbBFn2AtJciUbKL07ad7lDEDXB5BWRKbq8G7SmSjrymZSxO4hXn3S0DPAxIJ8oL705IFZmrVQFxrpNsYUdGCmcCOwD619zxYU%2bBbBybygEVVGyNuQg6S%2bPT8rhmoSpbZ/NvMV2Cy1Vw3wuqPSh6k75GBJA8mgjZODIqk5EsOGMznlIC97TsQgyiuA2HPLzsKnpngOqK%2be4pnMQCxmgnRAx12kOI6bA4o%2bJzyHZuDK/MaYZ2XOSjnc7CfPX2jyiZTL1HZoFW7ohl26ZoQfJekddcDQQpUVfmIEpayiKznk0hO1lHWkhmqYNVSE5Wqh3E7hb0OtPGd/2rc2D/6wOe%2bes6Rf1VGeMmp1w%2bd8LqDX/Po4ld%2bd/hJd%2b6q5ZNIkfveVEfjsOJW/TeJWQdi0zDpjKuZbyqMyZU17Paa2dhjtoPFu8fxwSEgMRNYWQTIwTZt%2b//xQn8WG/4vOsVIGZjlG5ZhfRGYrf8OvQmxUsUm2hRfB3z71skfTKx45msXnv2av2oZd7vnTd2%2bwwL39/7L/8/em4BbVlXnomN1uz9d9ZR0BcG2yg4Bu9g8QIlt8PPmXRMDMTEGco2apAzRxCcxaoISnxqVKDZPYoJGrwTMe6KCSXwaREQEFBAQFKi%2b6nS7X%2b39/jHmWGvudfZpClEpvrv4inPO3quda665/vHPf/zjKy/5x3ed%2baUvfaNDu%2bY6/AqcrLlccGncgoboRz7VA5mGthcFBN2%2bT54fsr69VUlofzxDzTSmPSyVAcjwyG/5dP/Qve6Oq2/61y/8zcnvOdwb8nBcH7MXL335trPhIgO2naIuARshEbVS9aheEeDOlppZSs06wLvMqWXQtbO7qyQ8ctsC4FekcioDMx0gtTfyT2NAbEZJAURBro2WwVhsTwDSRf6iYDtaEogp02W3bxm0A/yVQWIxqEhBKVl4Yk5%2bUx12U2Q2xQRjIcFRLT3WV0CPDUXOExh5D67tZ5PTHHbf4eMVV7Wc97y933Lyq83Klz3nAczLwB1uNxowsJZeyZLSQzdqRSmVXm0dPKZj4e6U3x8Ad0ilOl1qtRqcLMl9hAGwrAcQMZIoazqegrqyZMAGIQx62jI2rMbkKgi12VCbDWRgAZ0sSrYbAGYDaAYwFpjKvwNrbDHOOfukDLVh5JeAxBWYb9332MIzXFCnx%2b2JWbQyEz3C0K7S%2bRRMldvhcPexUpXLcbUDbICqz2s5WMHn/BmSlK2pwnKbrDaLoO1uBwRldpv7oQmAbKnWOMkJB2wm6NDmLV%2bPtqstT8ExcxmXNfMwLhlc%2bz72X2bWy0GYLUfT6yhvV24zO5AaGUcMyB8nv1lJaoN9jKtsaoNvfdbxrJYdpfR8x%2b1juS7cD8RRplMzP6vyE7Xt2Ncduva%2bsPVge%2bEwE%2bBn6HBF1WqFKI4y6iJBFaA%2bdKgbVGmYuNTb9f3z7ztU%2b%2babz/nlJlG%2b9%2bM3bP/u/LEXB8ese%2bH37%2bpQ1St07is92gza8eo3L0IQLnjzZ55D/d1DOpg59GsvXk9P3uzSCzcTHT0pUhddZrvy/l9XN%2b9SBD/me7WIdxQgGMvu1d5zyDkgyHMaHj1wIPvO5z/3n7/37jc%2bsgpgPiKB%2b%2bmvunLzs5%2b7eecfverUnV/79iLt6/TIIZ9c%2bKsHVhKc6QG90KdWFZ9n1AsDqo1ZBwMhrCIHYUpbN9TJSSKaDWdojxdS0yHa3yeqeR6dcGJAw710xYU7P3jJvdcf%2beV94SLz5tdvO/kJv7r9Q4%2bp0raf7IL1I1xKUB015Qz6es14SbPdY4unB52hlCBEKnDM2vYu1RpernpYDKFvjzgRVT9s47NaZPTncnOajQp1e0PKgha1gkiAMjOuwrDLgl9kam8cQNcXtq7P%2buB6hUG0LgDXysRDg6/fKbtuV1vV75vNiiSuGgYe2nfbXhSBRiHVkUAG6%2bo2fC2WrkKAfDVPesW5aULsQ8XIjxv0lrOpHOdwY1eAtf3k%2bYVokl6L6q/CxI8rFgWQzd/V69RhT3gppKUaeWHV%2byMWlszQW/7BGmQx284BnFhgaiJup4NZAPxt9PN5XymH5gUjC2BYZmJtMGez7tqWNqBV8JN/ZjTHChZXYrS5v1sgu8w063flwIGfAHhgW4l94%2b6zgh1XqygAACAASURBVCj7GvN9LjPjiPugMyMA7zbotcGPHRSNYzDHAeK8MqUe2xS9KbsQ5QG/Pu0rzI6OOBYZosBuFw3AMGTY93Ic414Gd3pd9izCuCCg3Pbj9mMD2pXYa92W29eyJ%2bQxzTwL46Qu9j45H0G3LTk9LZfgPa4v2edSZuSXA9N2W2hwxJ9ZtkvLFWsrn8NKYLvcl/Rv%2b5jLBWXjnpWRda3XjKpDcneZjCgeSAEo1cLnFVV9JGlKdfZa1aXFdsIuM8NhSosdhxa8Cl18m3vdi%2bMbLrvgnNP%2bYdx5/KI%2bO2HH23ZsOuW/v/bRL370G2A6sbfToyAQEL7SgtsIkuSxGybojoOL7Guv6VXg8vYfjOmJv7qOntOM6OVPrtKWBhEjMHzXIdo8Ka//3QtEW6eIduHn5GjdgtWOPyL/g%2bbeFztvJAjf383ogVtvfvEnL7vvxl%2b2JOmhvJePSOB%2b2unv3/z29/3hP3mD9PQH9g%2bpF3UpTSv8cMEJJo/oQ48alSQHRz3%2bG0lCbEQo44sZHOFuVnVTcrKMNk3XKB7W6DbP5aJLSMfbHxJtrPl0Z%2bDTK9xDF//V33/t4keCvv3iz3z/vB%2bnG5754Vdv/e27HkjZRaZaBWhPKAymaMLp8YOLZgKoa9UdCp0m69gXY9GMe/B595vUCgbUGVaZbe/EdXIjGN7KgyvsU2ToTDeXqaSVJk34MYP3YikAsgCzSg66beBus7kSAIQipzEo2DGjcJHQKY9DmYm3Qb398IncREC%2bsuqDQTGlo/vpIxHWkmfJPjIGRAL6B9SoI9qRgISTZTkgEJtKsbEURl6XnyeQX8sAY%2bcGjLsvmjSr2vdCI98fYaw1sRX7EOkIwLskwarPPL5TNl9B%2bdKCUAOCfl7ayB7K0c5yT/FSAZgHg6yfLblWnRWyWFh0buh9y2BlNaCMfaNf9/vqjWhmaUpOL6vtJ0%2bwM%2bdQBpk4jn1uq%2b2vfM3jANGS2QnzjOI4I%2bvbMZB5mywnPcDn5WMtOc6YzpeDcXy3ApIog7eyTEp3XZZbjJttwLojQNM6rzLQXA5QLrE9HbMPWz7C/Rx6dFULW9c6DmCXGXB%2bhiyG3pbXLLln1pt/SVBgPT5lJlvPbWSmyCQ4lwuuldn0lYD3cv1Aj78kmCv1k5XaWlcdB%2bbHjXX2LIR%2bz8SACX4wFwwWmDXuhnEfoiAT3wCR3YJMGAwSrqgaDomZd2jdWTKDRNV2Qv2hR6Ffoxtuu%2beK//m5u//1h18%2b67K1jL0P1TqQyNy769CmzoHFLc3piaO2nPDi35h5%2bXEvpr0x7ep0qRYUhSqXO2bBuIudLu6xDdznFmI69YRpajzOoTMe7SUvniQPgB7Sl80tM8NsD9c4EORFyxxQZDnFCI9xfFOFOPEYNp8HQ6IKO/kQ7Z0nevLRRO/4%2bLfPv%2bSjt3xr38PExeehuH%2bPOOB%2b%2bmuv3LxlY%2b0UyGSu%2bM82HZiHwwmmfVTEKJIYByEzF1wqgHs/EuDeRXXUIOEOApYdxGyUEs1UUkq9CkeE93Wn6aAXMXDHzMzB0KWNMz59b4973fHz11/2ltc845caQT8UnWPzjo/u2HvL6z6RptkpP92XUhoZ0B5nlAQTlA3mqFFH0SVhk1O3RU0fQRJRBD172MlfQnBYWQzVZcWlVnXICUJwmvHCLv/E4sVg6ktvLCZaAeYBksNl8xGYeTIAnV%2b8Nlgv8leYbe/1w9wsQBl0m1Vfa/vZ4B3spL2PckBQ3ifaCW40ti0lJD9g3pHgyrIaOPCYRRl5/r4ZjORsloH8cgWiHkzhqJXaonCsKQdTOH/4yI9b7JmJNA9IynpWbCnBjXjSixuO%2bMhjUfDe7y/VzzPQxyyZKRDF71RobfsDw%2bKLa86yAJ6PUMwGjYBOC8iPA6K5nANWcR5mFhB0Jnwdtv5%2bXMuMABgriMgBRAm4LgGR1kttHLha7l6OA%2bq2mwZvp5GwtRPeruS8MW7dcQDscBnQ5YD0OHch%2bzpt8LnSDEMZeK4mp1gNLC4XwJTvwZrawQRO3O/LwZNVpbgMrMdeQ/k%2bjrmv5fbj8dTIifL7m3dK%2bWVN17HSYLLad8vUhdDNVgL5Nhjn4Kj0irH7ha7LQN24E%2bEYLIt3iTqBVE9FW0Mug8/iXkzVlk%2bReRbsiqqQ0kQhUZi5lMQJ9QYZhcOU2t2MFoIaNY9xD1xz7fzd3/ni1Wc/1GSfgPP2pqwXbZl%2b1AlHnfT4zVtqmzY9Jktiespzjnvc3tsHGzdsdhq4lsXI2XrTbofSfka7emsH7vZty5sVLxoXsqGYjtq2jmaTkF6%2bvUrnnySVevG%2b2rNAdNQa2HUF6zgOtgNQx2fw5N9cLX7i%2b9kITj4w/ktoT9%2bjx6wn%2bvh/LP7jN7/xw3%2b57MJnPmwq1q7W1Vf7/hEH3E94zkd3vP5/PPlZv/XKUy756tUL1OPKnB77q%2boiRGtmNO0K3DNCEiqWugHvtUDiPgaiWUobJ2qcmNqsNOjQ0Kf9Xkh1h2hvHx3IpW0nV%2biWr3ev%2bPGt3//kpRf%2b6hHfSeAi89bf3XFOmtGmn%2b5NKRu0qVqXaiqJP8VJqC2nY6a%2bEv4MwJ3Lc6cZZQaMo1yVvvX9cJFQT46XPCPYpiCXp9TKTPm4zm2/g1Z5H41sjn0j%2bdROXF3t4ZG%2bIfG/JsG6pFp4%2bczeXyGxMZ8zsJQEWNMg1iELNh%2bsfq8XiuuNRbtr0m0HLHUjyO0m0b/tKrB2vx/3%2bVquc6V1ZGahtqQqrFpYjsqOBIDbxaXGSXLK/vRaSIqfz3qN2LGmZSq4MqjXIlFg6wdc0VUsPBXgi02lLceRvwX0lx1tbHYeYHstzHDeRqbjIYgbDodsD4u2qNWqAtxX6pjWd2XGeBxwLYNS1WnbrPtaGPUlspWRGy5SJJbMHCbow27s6%2bDgzLx17M9zyckKbyQOnqzt9RRXPvdRQIltlgXkqw0YY75fDSzqOa4mSbKDgHyfpYBoLde52n237VbzwGzMrIl9%2b1cMUEybrInNXq19VxxkrC9X02%2bM2U8OxseAdu6jRnM/kgdggv1egOKLssBRhvsQZkeqPgP2GUhoqz57uiv5oMBdizKBdVdv9zRzWTIzPx/T3IJDC0mFTn22e%2bBP33rTxV%2b86KHJiwNg/7UXn3j2qY97zIn3VSZPpNih4XybdjdaW7qzRI/ZQsctdIkq87S1W4sJKtZDg4y%2b8eOUqplDuzs9qhov97G3xXoOuW0gqdMV04xS5CDNRjS/P6N2PaPB%2bnX0gbMd%2bvVfkXc/MAJvt4punaU4BqwDqMMpZg/YdcNncdyERFYYjBgnmfmEyEfuYdenyjTRv31peO1x6%2b5536//H49/xFRSfcQB99f89fUvWd8aPvc3XvHsnbfetJ8w9lX8wtqI%2b5sB7tC2QyqDBTIZdAB0BLDu%2bA6JquhekIL005Q2NmvUqmZUSYd0U7ae6m5MVYcIdYw3VD167HN9WvjSzRfvfN83L7vnG3/0sCiu8GBB2fbTL9180d%2b%2b4iq4yOw6lNHC3AJbP6ZxSkkwySCRXzDOAiXBFCevtYJuIZvxm1z51A%2b7xMDdPOjZqqq55c%2bY740li3mw1/ZQbidgXGYBCokNEjCRrIrPi0esDA6LZFhh3fuQClkvJdGTQ/MuCbi5/SRYeCOrwXaqlRcveTke9PbqO6/Xmw%2bwFvj/eUtucA2Fx7wdoI3OTvA5ll7sKnthlwIjxcLP0WJSA2rCYtKw%2b6q755dxozaiuxemvkApKsuxi0HlbWU089iH2DfKdgjMcI9E1iMBg8ie5CXESdjG5UZe3iEHZvV6kAN3dRTRvAy5Nhs9mbMwHzEYK1d15ByBLm3aOEntdkm%2bYtjPAugXMwd531%2bOPbd83WVdhxPuMNOBa63XPXMuS/cptY6L68D15zMay7Gllm3kEobfflAtf/%2bR9ZaT8Fjb5lIQLbCz5BrXNiLA7QW2s2tdysHesiDfBJhLHGR0LPhZAC93rkLqlc9qlaQyI0m/1nerBQtrnqVY7v6tpTERfFd82oTZ75LOfy2bL9fn9X7w%2bFoC9LoNw8y0oA06SExFpUHjNqMAPsHsmgVmNUkVYxeSJYfGHrKiiaqDjJIopf2HEhq2GvToDS695bOzX2nfeMW5115eFCc6rOszK7/stVduvn9X54UvfuerzqM5Ou74LbQ1jYnSHoJWMwZjlsAaU9x5hxLPp8/dG9IDcz1a30AxKePUZZ2EBDYOoToqnkPGAWxUQTQ8EHFV%2bXQ6oEFGtO/2iNJqythg/fM20IdPc%2biMEzweT5Abx7swHhRlaQxzf4Y0BVhXdl1BO%2b4dfj8KClMEHYb72lghWkiJgjimXX2f68t0Btl3vv6N6z/1l48AFUT%2bfnowHePhvM3fXHb9eSdtP%2bWVW/3o9O/fPUcZqoDlwitUPQWrLi%2bXBhJS8dAygDc9yQySgxBympQScikJU/7%2bqPVg5hI6NJyhQ35EDS8l586Q3JNqtBi7tPVJPl39f3/9pXt/0r3hSE6EgIvMGWc9eudfn/dU9myHXqySoXCSww8CQAYASiPwKA1alLIVpEPNSo9/qnsfZifCSmup/MXCJU0AX0u2slrferDvMLb1MvrPksR45JBWntxqpzL2e5XOlEG7rlxm3TmJzOjksc4o0Je3BgN2taM0enqAwTzZli0GRVrD/bpUSCq3oEQybVeKV2Hh38cUNbEv7GcF9mDOkTQq51WjvslVqDcw62DnLchRAaIVqJf/Zha%2b06eGsZ/U9ViJyYET2kp84u3E2cJ7fmmirK5rM/MA9Mrma8EpCZ5ktkBZe9yrTqdIiLV96UXjOmCnEtxfYdvFMlUjlMFA94fzWup1ZoN526e%2buD827zIG%2bAu8oH4fTjsiRcMyXq4zBtxDHsBSnx5NTDSp3ZbiW1gQNGCfdt6FtiXOG9eP7ThpdkQiZEiUPMjB%2bUk72NcLa111qshPfJmHf6066Af1QOcbjW%2bfte1zmW31elYCtavIQ8YeX7cxLkNd%2bJAPi8JDYyVQuiNzqsxAI1HbVBhmQmHcxKh2u%2bUowHK3XCNVyEGSgnQQRJpjshrbvsYXxHI2sfbuoaZloA5HGfNTBikitGkrjKlX82liGC9h3NFe8GwHoaNad4B3gPgwEcnMMHJo9/6Qx4ReXKP7w4w%2b8I7PnXvMFu8rP4tk5oST37fj9//q/KvP%2bLXq1u6dDu3vRnzLuwcMbWZyTXxK6X4vI99BwSiXEo/o6u9F9P39Azpq0iMfMgVz3xVE4%2bIH%2b0OamweWIoK9fRin5Dddogmftkw2qD9M6JiplCaPqtJTphM66VEBbZhw6HnHeFSrEA0hAQTccokeWCQ6ekqAvy7MsqdE68wEM8YQAHdo2BEElBdwY/sios2o64gxC22eEd0/LzLnOyezfVvuvOfDf/HOH37s%2bqtenldsXduz%2b/Bca42P0cPz5Mtnddqrrtz8rj9%2bwuseu%2bWEd3znx22671Cf2XZbJmMz7rY0BvsCgFfGfRC64lBRiWmu49PWdQHN1OEyVKNDw4AOeiFNeJKU6jsuPWqyQndGdF1663%2b%2b7t3nH7nWQ2jDrUfVTvmXi8/8EoLhe/eklMVtQtHQ0J2ilr9AMYpQ1QJKk8QAdxS9ydhpxmGGnVizDrbdYAdajmlfbZxlT1YNtSxHkRV7pOVYoO4FuJdICJrGTTOzBflq5hjoG/MdWUcZVGZXrYMxA2U%2bY0nQQ7TkiayWx7yy%2bcUhIEkpnGzAwosbC3zpBeBjGSkGZQB9LrOxE2BZQy/ysG4PCbCyvRaMgtsLQD6zpsvgwp%2bHZr4so1EHITvhVUF0GfyX18H1LAfm8Z1IbESLz4423CGluit/1qhRl91taiMBhbre6L1ha0vTRtDRg1UCaJ9oVSlJMwbuCEog8QFItZl/3W40ObfL5yaM9WidibLfvSbcjgJyQWDquCP9YsA5FZqcq%2bcuxwWjDiBe3GjbtWm0AJdIlGSfej34S5%2bUUTSnicb2%2bqPbFfvhw3OxqS7VUVDLnM/SgHa5QEXOa1y%2bythZjVWeX8ywgNGDzahdN8DebGyQka8ggRPaduT4h8NArzZILncNkDIawMutVQK9ZSy%2bZDepAFQtPtRC9dGImPmGfeWqk6eoBNv0GVRNhmKlmpYQRx7S2DMn5kRQ%2bKhu2O2V5GX5dZgaCTw7tRqyGdOm8GQfC9SthsH3E4OYZTJolwVMksKPvOlTWCr6xaC9DycZOJ2gH0jiJABvJXBZ6z4YxtQfOtTppbTuqXX6%2bFfp7va3vvbHu3586IYHA95f9cZrNt94y74X3nDtb3767rszesAUlZoPU9rYcGkuTGhuYBJoYV%2bJc9sthaLaDYduXHDo299LaSHrkLeQ0OKcQ24LeYEC0mmdzwHc47dM0ImtHg0nG3TcRodOmHHo0dWEvImAZTdHNWC/TVyBFQseY6iM8G%2biWrjG8CwFGHvTxnilxinRehSuMh/i/u6Libb4RGr9gH64bZLoJ4tEW8wxsDrWDVBgi4gW%2bkS3/jSlzetdesrW9DNbn/yR9%2by79chWQuRj9irj1hH19brtHzrzwM3nn/PtH0avvuPeeeokGVVRdGlMlA7AMYi9XJGsnatWEYPCQSTTRAzOnIQeNVUn8lIK0ojm4/U064c0i9LG6PieT8dt8unDH739gy99enzpm885ckvsXnjJDdvf%2brqnXuA77qvv3ZNQFnYoA/uVpFSdnII9KrXcXl4dlZ1kGg5lcUZR0JLKhFE3HzdhBQkAj59etDRZccmtsSJ8DCoCpH2a78Q03ZKUoMVOTJOmqh9%2bn2r5tGD91O%2bwzVRTNHWdbsLr4Xbm%2bzLvfgXrMsJIl5/vJvnx5tsxg3lez5yDfsaDzkMI4Fd74JSxFd07GGvYb6mufjlKTKQcysQrO5%2bDefMS4%2bTXFuQl5aTYkKveKnhn9U%2b%2bDcBpwIHbz70ZuPrlaNKrynDydjMybIaRmMrlk7IjPvld3G4yBrPCCouTjb0oaw%2bWWewrRx1xbAkQ1lEwihkGfGdLR/CccPJ0U2Q9aD4JuiQowALAr0GGynpsDT7AqAYsNtiXhFtIeqTz2uvh70LXPwqsC/AMUFHMivQwq9Eq2gPXZjPr2KeeB66xZxhznVkB%2bMf5lI9bzG5gVoXvUO4epO3O59Soy2No%2bpReDwIOAGgNaOygXPz7i1kFPbbKoXQ7O2F8iXTNYvm93PdvNKgZmRXgK3CoA2DeaC6dIdDCYJwfMEYO9WAB%2bWqDhP096gVUfWpERX0SHnMNa8yabTwny%2bxzZK4glQRNgPnGUPTcnYpPdezDDORLggGzDY4B0DtyPMxiVXxqABGy25dJgO3E/M7WY682QwoZDVjxnIxdDbSba7VnV/G77ie/LQrko5gTUnEMPSkAdzDug5rPkpNqUzTu5YCBrwO5Ln1TURU2heFoRdVBP%2bW6J3vmfJpoevSGK7NPPo3%2b/YpPXXjGYefJQdvurz/u3H/54DMvuv4HsHtLyfNSOjQg2lQnmmWisahFgaDz0DBl3/kp36EfHUzp8h8FlLUTqlZcWucPafKYGp1AA6pUAmpViSanQGS6DNBrUUqNpseFqFIAdSPTg6kHxl4w7PiJe4gYrIWMOLRZUlAXdj17jg0CYeD1vtu3E/cYvEfX%2bL/zPZS0O5poYgwlWoBtbUA03ye6e3dCmzZ79Ojp9DO//87rP/dISVBdYxc/nJHil7fu%2bz5363mbj3nCK4/dRKffevNezlqAm0z5pWPutQB3JxUPVhP11YOM%2bsy2C4BH9JdRTCdsbFCcxpQO6/Qj36dpN6GDDNxdcj2XTjk9oPf92X9d0H3g4C%2b9hPGDvQOQyLzh/MedvO7oJ33oacdk2xbm2qxPB0sHnBO5U9SgNg8yknAq8oRm3RO5jEWCKeOejWT7jHY3eLxDGNhGNcapCfLjfg7UbasRe6vF7higborSKHjHeenvmG7H4ISXDD6bRPEb00B2MIBjyPd8VgzU8BmOx9vkSIlosZOYwCETFr/l/YLBe9HQS/3nUSUWCa9SHTa3m7S08sXnhQe9svUCygrg3uuGnLQLTgRNwC9rU%2bhK7otnCklJOXn1nTe468F2xTVtN85/nj9DQGN1mvJ6ZUmNXS1WD6zrKEgVQDx%2bnl7XtavK6rraZvmzYgUICuTHed0DPMMRh5dSMIKPFJgK8y9FrWxQyf2XdfoiG0L/VRDbR4Diaq6ASlUkuReLBg8azCCIKOcB2PvnYITlUALbJNlXAhV28kGyMPIQzLloGy%2bVKSmTb12wxojGEQg3FgEPZi4K2Y5YiEq7iBZfgxJtAw2E9JxsO1FspzkLal%2bKc4uCOs1U0N%2blvoD9HnHSTNhoMBkAnSYPYsStxHRCyIqWMO5r6uF4hY2RDK1xW13NBtMKUDXJktvMsMfjAPJIjzdacwBWLAzEByLBAQOPxwPgF0x0PptpBwjmhPLjYUag6UthtZJGsV83QNlsgwABAN%2bey9HfWQZpQHbdnNtKTYShAQGDSmB0RsEYzeXkPo7JYF3PwYB1/jwU204ERSkcZZo%2bDbujfu66I7aH9BwaDhIaDokqmI0DMI0z6vYRxMLbHe8ShxaqAX3hHu86bza7ff9/fO6th8u6n/aySzdPH3vSuVd88DkX3XAXUaeNyuTwZJMF/VwDtxwYOy4z7zinuX5G3%2b059JNdCR1FEdUbAW16VEBPqGbkTAXUdFOa8ogmpj0G6VjqcInhAa4A23gPMHYy7wQAcTgeTzeJoqiQwqAND0YSEOJ%2bskTGgH3scm9EdDyY9XmRyiC4Y7Z9mqjdFbCOn3lfd4kqmOkA%2bdYnunN3Qls2e5RE2Xe%2b8rXvfeqCc552xLv98X08zDHgYb36J67%2byWVnPPfYx9z9g/jU7951iKq%2bR626ebzNj17k5wWWANiHcVFkAJ0PTjKDyCSqZlyAi2pexPp2J6vTwWFAhyCTcYkODEUm43kuxYNk96Vv/8BZ99z450dsUupv/eX//5KjnrjtN97zykf9Ntj2JGxzJNtseFwZNXYnqel1TFVUAe14ICdaHmVISuEepUPEynQS1lqI6jRT69LisElTVWEhmVE34FxZ7QWw5c0KLXQjZtB1z%2b1uShNNSYAzmzIDJuvLehgOFrs8bUJTTQniFowchr812y50wegXAH3RMPQ52Oc3fp76WSThjWKMnCXKZ2t%2bDk%2bM7Vtf3r0yzHZyrG07qTKaosprUeFV92Vr5PGZAPkqe%2bmzdSW3mVZ%2bFXmN7TePV4Nq6SVhtpDaWLm6%2becPtdxmLU1ug/dxgFxyFSS5dTnArgMomgNSmIJxN8w9T//XWesu7LtpKfOWG9Xhi%2bREqs0KEJe2LxxzCkCtDjpik1ncN2HwdT18Pq74ld0%2btjxHwbnOLuj52KBW1ikYegXMdjuhbcG4ow3VgrMAxDLDoc%2betjG%2b13Nhl6ZGnRbADsZ9LtKlendh34vZgUJ6BLZNCnbxfTEsN9qjBRtRI%2bmxK/JKgS%2bdGSiCBgX3I2yzJQvKZyoASk3egwwPGS1EcnHTDPgLm1K7WJh5XPJEZvwtiepFQM5gFOC4LxKmJbMD5vvl/K6xT2UyWaJibjqYUXl6zQ5kWCv%2bzp9mAXjKQttsud1/jKkWA9imylrMCgziLeBb7nf4uxuMbqdgGcmPOK9DEdF6Swqhp83AO7RY9pISaOkc2%2bioYAckGmTY16qAXc8n17hjQ8tcid9jqI7agAeh2ELqwiw8wDyqqA4S1umHw4RBMuwho0yKMiHqQN85cCilxX6VBq5HZz6TbnvCU9/3pt3f3/m10TNf%2ba9L/u3u7Xvv23/um857xp/efFfmcACt56z2siahdELTatB5M4cadY/vOaTFkPrh4wr071WDg3AfIJ%2bKisRRlsWaxtZEVejQp5qGaU%2bJphqyDrrCdINoGMFa2%2bjaXaJDYQHcIZHBfvYORLOOBX1c%2b6iy7fi8HGgCxKPmHletNaTrTfcmtG7So3V%2bdu%2b/33r/N3/vBcedczjt%2bXBd9xED3MEW/%2b07X3Zdr%2bNu63WG9JPZiKabCQ1COHDIaMVuMfBoh5OMQX%2bDeLQJ8Bc/1CZjOgxTmm41aOt0QovdgEKq0kE/YpkMOvW6mksbHlOhz/7zwa9EN15z7lWX/%2bYRmfyw/WX/vPm9f/XCq572pJnj0/ls04GDC1SteKxbj6JMEv9qfi6RwWOTuC2aCPoM3uNApre9CKydwxVTEysu1KlPfWmgnfUFjp8Ayth%2bitnzjBa6WSFz6cl3Ew2P2l15VWFKsW3YcGwrf9vfCROGDfEdFnwPoC%2b/i/8F/q9ymgUG%2bClNNQM%2bn0kk3GBgNoEAfmpvwXdg20WWkzELD0mPAv25NmYGvLyAlw4AGLRtaQ0PkNa04M88UJikP/G8j6xKribJNXenKb7jQRABGm8jjjgYtLXqq7LxRRVYkd1gUbcbBfP4bFRyA196savkF3UvZi29eNKPFpjSsAjg8GdNitV2PJygQBhwJNMOCzBTuiG6Py424mC2CG4/8oZRa1AFqbrpYDBkhyHUFdBgslYrgLlcN/7ZMp6i6JTux5bz6O92UFEw/1qJVkG8MNIK8gumv5D%2b8Ges5x8F1jwUWkNkLvcxAY3mFJSDGyTi2hKjIhAp9m8X35Jzk1mC/NrMhaMvsFzH/G0Ddwm8s1xmJH1S9qUsua4jAYd8h2U0MBFWXQMfHEzBvtYJKGYdjGQpT9SVdpYgBQQEQJCcrxIDmqeAJOPcurQmY6ZjEoALCZDM9ioY5v0I9yALPnBF9gDJsU2RKEjHiKegNwfd44C4YdztBEw7EdPiRMRJRO%2bJ%2bTl%2bDqo4TwVcHIRYenlITaJ2zOwqGPhkfpFaXOG4uETue%2bZyyyCtHFRhXVsClAPv0mzCEimP9Xzn12KCmfwrPOvp6PlzcurQaN2BSJUYrBk23iMOPDFO2A4z4LXwDhiGAmSTWH2YMlqYT%2bnQIuwTq3T8du/Aez42/73/NDehOgAAIABJREFU%2bYZ1Z5WGoBX/BON%2bxguftPOvzj9l53fuzdgFDkEv2m8CxJT1TCHdy6jrePz3TEGkkaBGQbkN0I2F45QB1eo8hH3NNKQpAN71nqEGznQNCbhE6%2bpy3VOBMPK4j2gfDTLZLdfYvuK55/Mr9btyn1OZDDPvjkiB4OU%2bFxHddE9CPmb1vXRfK%2bz89IwdM6cdTns%2bXNd9xAD3ddvff%2bbBW97wmS9/e7Dpvr3zBGZ9siEDIA/s6tEeiNUjQHz%2bmbGExLrQtqt0BrGzSwmta1RoQ5Povh6KLg2ZbT/YJ3arqU76dMJR7u7LPnrDB7540Wnvebje6NXO6%2b3/cON73/a6p5zjOc6me%2b9b5AcGDwScZGDdVEcyaprkQFS07SIRYTaJnzYZPgHa58MGTVd6DN55qpClKkavbkCtsNoCuCcNWFYArj8ZNJjRFscT8O1Ru2eHBTrYZzTR8Kndg7Yd4FvYD7w8xwF7G9BjveJv0SryvqygQGU0%2bhlY%2bkkI/Sijdg8BgM/HnGi6xiarYND0JaQ6ebRboeH3HjLwvlwxKf3c4teWSeArikKNS3JFgSguDKUFooyDjfYvLhhlQK1ur/77QDa4ncrcjxaYglZ6KDpwDhzGc4kK6FWDjMTP5Ras0%2b6ENNGqcILoWpc%2bMrHI4Wq19naFP341lwwhCMG52rtXMKvHE737KCBRkD8KvLFOAVHKYFj2Kzk7tgRHj6PHVXCtiM5m5UfbYLQQls3UYz1bNjJyLqWXqb1PG1CNtIMB39IQ0ho4LzlXBDHFZ%2bXrHvpVCkJ7ZqGQ7tjyGwX05SAFnv49OOI0TYIxy4tkf%2bNklHqn7OvX9lCGn51wGnWaCzOaNozwHIC05S%2btEps8GLDJCgTGgUeNKBEJERKRc6lPneaGGa33iWbNY4D9zov6jdn82aH8xLCLfoljB60Sw21uxkjfsx4DG5TrPbRvrQ20VQKD9cq/A8AqqFfJCph2ftaNrl3lMXpMnlEAoIJjURNlDM3N0IRY7HMMqzruGbYBe1kCxNp30wAjOvaSrt9W6pRnGrCPXP%2bOxGkjEUK7IwBpDOL8OvE3lqQvOQCMJRisO5yoKlVVWSHKkpEQNWJAjGUehWFEew9gLPFoLqpQz4kPXPzu/9h5OBVVQWC%2b4KwTdl543mk7v/eA2C5OQm9uhhZ7FOTXdkbkTxHFcwK4PRREmifypomSOSJnhig9ROTOSF9Dd5y2gim8YdfXifZ3BLSrTbQdaAGgQ8GEydp1YNwNcMc70MSgdDAW8I79w6N9j2Hca3WRwiyjUlxCjOEy8V4FcAeTf/c%2bme1AMvBMPdx/5q9/4Yx9N776iFVFaP9/xAD3l1xwy59d%2be7tF119/YDu2j1PNd8hz3WlY%2bABC6UqKl4Q%2bntuA4lRB7qoUBgfZdXYosiN6eipGlW8hObCGTrghQQiVmUylZZPz36Gu/u1L776Lbd8%2bUW/0JLFawUiq6134cdv3n7e7%2bz4xLp%2beuqh0KHuIrTteKidHLgz245pt1QkMcAQI8DdOggPyuoXi9RJhxjYMqBjEC3DJKQuWEbAugXIoS0HEBaPdB7Z2b4QoB0subDisg4WAGubFZfP8H1EE02AcIBqA64NKNfthLWHzCajaRMY2MezHxScLxh2lumwDj6h6WbA5yUzA8LGIyjh2QPWxCunIHP4%2bUvTcYglQZAbmTa0j8WfWdrB1e7lWr9fSW4Dz/FOR2QxuX%2b8saNU1l3ZaZx0LqGxHG3GSXFUvjCSHEuQhkhxKXHJGQ0MAOKVnZeKsoKSev2YXzrQyOIFYEtwbHDf7kScPLsacBcGHXvO1aDmuMW2mishlpUeBxo8O4GAdu1xwbK3aKQQFeQgNtXN/vWjFppl8L60aJUeqpCvKatcLoKlaxZFswqgvNy69oUoQTIMalSNhnlfztdJU4oqdfIsAF5uCD7LsW/o0QcAQ4HIjHoMnkWuUlTXBVAW8C/b8fpIAM5EylJNxFZDZyhyiRCOb0C9zgZoYCABp5G%2bGLTf68tMBgNzk2CMXQBg4xis9TczArxr9FujlwfQRuEefMi/Vx1jdarKYUFV2gUWQoeBOtadrkiyuYJsrINjThutMZh66K0hR8D%2b50OHDQLcaam/oZpuW8qiLLvuUwG3SlZw/uNCaUhvdF2sk%2b/HSF04MdaAcL5OE9jMgX2FBzcJeG81GzQ7zISBb8vsh%2bray2y73W9ykG3p3%2b3Ox7GLNaCqjh3nqXp4TbgF6FdnEl2Pj2UY%2bA6sH3Ec86xjH6CRA8wSW3IRtC80%2biqbEdYd9rB4l8nJ%2bCyfIRomkM1kVKsS9cOM5hdSml1AAaMqHXuSRxddtuuT%2b2%2b8%2bq1r9Xa3gfsPZ4mSRSKakQqvySyRt8H8XGd%2bzhAlh4i89UTJQSJvnZE1aqObAAfXvC4lgpxgvXqsGxygTDsz5KWbBQwF2QycdADakZQaJkYqY8hBtAdYdxRRgme7UePBE4T2RETHTkoyqjrM6TQMjtUsadwhl0EKD4D7MErou3s8CvvACy7VnHD/817wD69euOtNhyU/Wus79Re53iMGuL/jYze%2b9y2/%2b5SdX/rmkB44OMc2kADuZizmnyOuGDrswV0m9HgurNwYvhNTlLVo24aIwn6Nbvd8mnQkKRUJENC2bz22SrfdPHfdFR/7//7gjmuOzEjunZ%2b47ry3vOa0S3YfJOrDZDVuk5MhAVUYd87wTlOK/UmacDqUVFpEgw4lfouafp8jcVtTqAVq2sM6TdX6RmoiwBbgmpM7AaR7kvipwBsjpDDvBqznaEIBuFX8RC1mS2JG3l8/FpJ%2bpRHfBAE4hC2x4b%2bt4EGAuEednrAluk9A7zIjz8DUfC5yHwkwIMGZQlDQEWcbyGmY3ee3pLDQ8n7PjJuNuuhYbjrWi9pu74disFhCoI51ZjFvMPj3W7aT%2bJQBflfAmoD9ovBUWduLvxuNIJfiKFC3f2KfNttvV4yFZh7FpeDUIIy9MN4A0gLwR9l6BT7lF4q8BGD7KXCEt%2b8NOQDgWYPcFlMCA14bvu1IzG2gxoNLPWPdifUTq7Mdjjxnyf2zgF4B3MeFdAbIK8C3Ez0UJVo7F1APt5sxX5ZOQsE7QCbaeS1LHFQpGBoWG3qAcZvh3jGQKia7ORjp9imu1CmI%2bvxdpPvCyvjHeTYC0CWuEtCNRWcJeFUL9DuZBAp%2bKKx%2bvVGjhaEAat0HHuaaFQBwbgHYeaOh1/1jBwKujW0lM%2b3yty3bEUecGj/T7cjhIAX7y3MfgCimm5TNIlm1Rl118qnXGNBjXQBwgFtNPl4Ao19Bv5McCP0JRp5Z%2bKiYQ2MGPnO4nVrNGrPyAMcM6vGdKkRdjHk9mqg3GBwrkOc%2bbydkmmAWkhwEGeOAO5M0YxJQFfB3%2bwLKVU6hfYm7iAkq5LxNHzfkDrTvAPwiXpSFj2V%2bVza%2b/BmPHdY1qaSFr83IW/Rp0v0CuLPsCLprc5xc727aA/uZiGJuS2/Cp9ZAGHXIYXJAmRL5TeO%2b5RAXakJFVQB4%2bLcPIOX0ZAYa2%2bD2V2EPCTA7RHRgWPeDCSWpR/NRhWZPcHdf9w9f%2b4O12kMCuJ911gk7/6/zTtsJ4F4zxaPmDROdAaQDvAOk2z/N59E%2b%2bZyxkmmgDUgShduLxbTrfQHbvs%2bw7QDl9juXd5ESTTaEcYe%2bHYWg8BbHmIp5TRRMyt2hYPs4RBV6sdnGvcXvYN%2bPVuvHiqyDwkt7QqLjJovkVID2xY4EAb5PPNNy%2bwNEBxYTmplw6bTjaf%2bvXXDH333lvY8/YpUR%2bfOzlkH5SFjn01c/cM2zn7L19O/%2bYEj3H5jnKA%2b3vh9aBZeMJKYfwQZSPNrFQaaojAb9O7bhkrxuSM1Kk46bTugn3Wma8yLOqj4wyMh3XZqpuDSxMdj9la/suvof//SY3zsS2ql8jmDbX/U7Oz5xkkunPrCvR/1%2bTM2mS91uxk4xzabDNk54UJs1nzLLPQYPN1h3fljzxE05wmIPLLRhxVsVSTg1f%2bfnYM1PjgB4BeV48rNR0M6AH9OQ1gA%2bURewbkTrfC7AGy18rjp4fA8G3nyG3xWU5wFER3Txo2x%2bRJMNn69HF/tcC/YdwM8w%2bthPeSbBktwA3OvsAAN7eCI7SJ61jbFGp/ElYdejhXbCycDKKo0QvaKkOCyGnsH2GotgidwGaT%2bKqOArXxR%2b0t9tD%2b0lzD4HeWqNKCy7nLR41EsRqaJjqCRHQNQoK4/POFnWaO35nhrbS8wYFIWm8LsEC1hs0J3vtw9duzSeavzRxiqDQX%2bCPn9iAgy7MJ4AtTojoax7IaepjGXh1yLxQVuEQY0qEZJaicBi4/fxaFiuKQyqq65TfvbzgHHswCWNhZGyDNjUAUK7mzyLsLQjcqYblM33RphzcfqRGQSc5xJGPksNcB%2bwPhwDCgD5QkwM5uHuwvfNnKcfm8JdAOfmuyAebR8nyyiq1FhigyvBeiy3MbKlIdor7Of3KAkM0%2b04uSzHjvvHyYg4IdfgDmXeEYBgv/aCACKX%2bmQZBwv2Ug7LeL/TTYo6PO/JY%2b8Ug1uzFXc%2bYasF2MvnYNZ5Pd252QBaX1js6ef4eyYwSVymXSErUJkPP09G4jKLbeHyUUrCH733xb1hn3NTsIjlMp5Ds2FG67yCmedAoCYaZPQlnLMAZ6eQAwUZf4YgJgf9jsgfkKzKAYexZ0S/UD0/kxAWE4HvbKY/32epz%2buzMEJAmX1xMBPJO0fbkj%2bDn3vNZzZbF53RwEewisR4wMy7Yd0RsPR7wryDdQ%2bHRL2I2HoxjpGTl9HsQkq9XkKDpE7xVo8%2b8pn9n9yW3n7FpRc%2bf1V7SNhBxlNbz/33jzz3ortnjYLVWHLOQUtuHiJbGmTPUOD6N6DqaUoEwH7AMOz78bnFtPMTD%2blMSjSDRFTMHGRE0/UimXS2Ld/B4AM6dzDuqn3HmLIBOncLrOv4rbcP5woWHucE2Vj%2bPGohdjD2ZiaIvzOWkIiPGbgT0Q8fIDrYTmim5dLTtzn07k/ecvFfvvZJbx475B1BH66NTnmYX9C7Pnvb9rf8xmNv/bdvdqjbj2n3fEgV36N6pbAkY507tO3VmAZRwfgoAZUPTJnLyavtnsPSmvUTNZquZrSrO0UH/ZBq0LfDTeZQldafmNFBcq%2b76cqb/vULf3PyERfFbd7x0R1/9KYnPuutrzntEhRaClwkq0nlSi6B3fBo4LWoRT2jXTOWj9UWUdihNHVZFsKMedAiijrSU4IWTVT6zGQDJOVvXbWiMqC5LAnBAK1MPLYBo71oilrYQF0HmpKSQIB4XZh8Yb%2bLQ9tdGPeawXipjPwo%2b7%2b005eDCzutnWcSTHKs/I4pVWdUBmTAO/asibLCxosuUpn//L3LAN8tZizM9gudSEC8YfAhtdEk2cJrXhpZWY%2bVHuEljPsyK48rErXcfm3tsEpkkMTZ70ulQAXpNsi3pR9FBdqllpUK9sX2cjzQH/Wql7NUSY9YBIrMRZdeT5J1i8qmxvvesOkipRF5DBZIePAy1mq1osvXval1phGQmGRbAfUSQELis5q8htlEgyjK4Nlm9ZV1zA9fYDIGDlphdrxevwgwZD8joSDNx1Wa9sMcvANozYcVmq7CclOubz7EOkNKDJAG2C7cpUb1%2bMsHC6VeqGgNY4YJ4PlguEdW5R/XsPiJ7cOYP/cIke2RoxhxilkuExB2%2b3mCnMBlcQSC574N4O0E4RFpD59%2bSdNmZgDcNKWwYopumWfS40CMKPLqFMSoRS/nBnFnVGnk4B%2b7rZtZgdCv0bQBtAC5XOHXsPQsx%2bDgRc69Wa8J8A3kfjLgrADoG/Yd9qCBj6IW5My02Ocdd1%2bZZ65ZMNVicLyo/usWa419AqRPDmPW4QPcw7ABAcI82FUzG8B6fMPYY1aBpluj7jPmlrAfvlYm7sjsA75CYCLA3qGZing28xWZbsryFSPF0YtndjyMGeSrNEfZdh2L%2bO%2bBVERV%2b0rTvZYMaeVAQIMDZeVzX3sT8CimAGDH8fQ9xQWZegk1Jnzqd2NOmsRwAtYd4B2JqnhuBv2YhlFGs/Noyyqhb%2b8Pkyu%2b9InPn7%2baPeTpr7pyczgxc%2b5H3v2rF2F046TolGgO7DXkKGDaNwo1Eh0gcjeYgNB0XX3UIIcBaFewjkbJiyQZrfuGBtG%2bNtG6ljjEqP0jpDMA6dgXPgegB8Df2CyKKjHgTsXicb9VQJtBugk%2b1W2GP4NO33qhoy33DeQzuM/g3BS84zsoIoZYp030X7cM6KRjqwzc/%2bnavdf%2b9plHnbHS%2b/BI%2bO6IB%2b4ve%2bM1m7/91W898fNXvu2rh3a36dB8j7qJR/ivVin0aLhQ2DwqMwz/dn5QTQugA9QC%2baw39FjbvnGiRo0go2hYpzs8jxpuTFVHEoN8cmjy2BpNHoyveNsff/iSe797ZOmm8IC//YInvW6w7tiXnHE02PYuJ3FwIqGxUmvUwbZnpkoqUVpBZokB59xumLIG2BbwrsAWCZssEzFMO0aJIlRSptsA7BWekuUApSSbimZ9HHhfS6fWh9yW1ujx8J0y82XpTQ7e3VH23r7Gsh4fQF5BOQcXVpItLh%2bBBpZyYq3N5ksCrwQHdk6AtLuw9jg3XTQoQTvZmnr%2b/uegmbdvowCHCnV7oZ0Lu/ReqXuDQVHc/ky42ky%2bTC3zafNNGwWWOIAAbkh4pCiVbWeZA2uj1y%2b4QYVuctc1gLBnCHJZDzPsItGBPCYPRgkzUphx0Hp%2bQhRAvoMFgQKuR%2bU8chUWdDWXYgNDW5mC42gVW5v5FzcbaPfFO18CCFS%2bFf2/yHnkdwQbOA/NB8jxsHlI1FUC64LhakcBP6utypDmQgBFbKsFvuQKeF7IzagdVsmN2twGhXwLNZJN8boVnu3xX41/4gHOh5U6VSOAaHskwWkIKPYj6%2b1/OMfFiZv7oMw4WHMskNnooiA%2b/7shLj0s8YnVylaCjGFQZ9cMDfIA3BEQ8TXwDIBDqdWp6806y4VwS3AOWCextf6S/c8ynPkBgKzIYZzJFkXI96mJtAb7YR1/6PA5sbONiSbZ778/oMSvkxf3KfJqNAVQz3IPh2c2cI3qgy8AP6P5IQrzCNOtjLwEAQL4wGYDaEGyA4CN26NyH9Hjj84cMhg3jwvWx7rSFR0KOC9A/PLxGQp7IbDBPjiPAFIh3%2bNgwtbVK4uumn30kLYB9PazhaMoY14eSbTn2faPdi4As%2bsmgEGwoF72ekxUhIXeX6UxKxVk4qt1xQQjDhMG71xRFTPbUUa9MKMwSqndTmm%2bV2Pj9y3H0W0Xvf/GT3/xolNWJAjxXp/c5JzyxgteetXWiqnMZ4A7GH4cU0E7APwMdOuGXdeRVcG7/s2g2IB1fLbRAPYNcKFRcA7nGBObqtYd3yEW2QRgb0wsbCkNb4vvq0QHTT/IQTqeP8PGb0ClVeMJCV/3owKiPUYuw8ca87zD0jJ0iHYtEO0%2bGFOj4rCUrrvQu/dNb7/8GT%2b46vePSPc/vdS1YJzDGQZ/4euio2442j/lT/7w1750950LNIuoPgPbvtRSDhebXzCiX%2bgQ9QUGB5UKHhqP0iyliSChSrXClcKysEZ3eD41vIxm7u3SfVsbhNfb1NEBbUrpip3/49K33/ONPziiMpU373jfjt3ff%2bOf3dV1XtAYZJvCbpsrpCbBBDnDBS6qFPotyvqLxgZShkCOeg3jrnC8DKWU6dXOAHa7Y6Qq%2btk4V4zD6TzLgfrD2YcOIrYtpW6fDzDqDGBF9CrhlaBlVLozEhCUGH3Zt0mwNQAc2vm8nUakRACL0jkB1O31Rtx1chbf1tSLth6LFqKSKrLGrhKJsFZiULnNmHmFc8nPAPD1/nASa0NAfDnIwnHV7cbWuEMvv5K2WiU70AmDwbf3MyonKeQ3CrDLeKhg/k0WW2lExD3mAmSGncc1DJBptcwiCY8iH7JZf072hdeztSxGVZqqSPVbTTUE6IbEB4AdshyeXcDYxOBYZrAUzGNXous3MzZRlSaCYT7TgnX7KNNolkbdAH0Am1DWzUkswwx2I7GsbPmhJECa6ejy5XpORt2kSu6wLeemb3tzNWDlpypybCXD7TyDuAKpivjb63MxrNSoOuxTn0G6nBv07gDsGGuklTKWDgHcAggH4dIk3vxcjVwmX9cC97zffB%2bYISi09GCMa2GfBgZEy3EExBegvkdxpcH7wKKBBX76RuvPwTz8q00gUAt7NDTbFMC8eMjiirDMkEWNziAgv6hmvPHkyeL7lmU0XYW8BMC7S1EAJy8Bw1NIdu0agF7JaDECmAeTXejkEQTo%2btPQwpvYhwE4J9L2iaZaUhnV0o7jGZiNiWaMClWdVFi64ilwx3kpWy5MPLP5MlE1Il/BvhdDhyb5WhAAFMGHM9GksCsJoNlCh3X%2bnMRaLRxpssQk%2b8OpxxRJ0pmDttG1s%2bTHuP84XqFpP9QXVn6cBaYtm0FABu94LFw1FgGK8SPXmTYcG8WY8tByBXTFBZn6CQVeRv2hyGagdYf7Sb%2bX0WAYs8EB0jrmazVqbvEO3HDtT7/5L//4rbevlEsHPDSzyT/l9Re8aAS448whlckOEFU2C%2bDG%2bA4Zy4wZfSCH2QywDHBuSVC4KBIYdEsuhd8VjAN8s37dSGf4OYH7jBMzXsD3gRl7ysAd6%2bJ74DCVnfFnpvHRzxm4w9s9FG27iWN5HU1OLee0A7hj/qkzILptFyIihwnGU48n%2buuP3rjjwvNP%2bcGyg/gR8MURD9zhWzp57Ennvmvncy66/Ydt6oY9StKA5S4rTUUj8mTgrmweM%2b5SfAmdueFDJtOgZjWjfs%2bnu4KAWo5U7drqi8ZutuLSS5y5i//i775y8WpTWA%2b3vvCOj9303lNPf9JzTt3mnDp//0IOEqE/hg6Nk1JRchzJhLWA5sIGTXkd26xuzZf0YEC2ZQqx7HH0QZcp68NnklkDj%2blMBsdLGXw42EC3rguz5ZDilDT2BfSQ75Xtzkm1MoOvgN4KCvg9XOTi0SSq0RpUxecAhsaciAQMMquh7D3rYI0rDjLoJTF21M4Sbj4YcJmdt4pN8W6NaJWvBUljqAg7sTLAX2sHeDD3f6V9F%2bx6kQS7nC5qnGQHYB0JtHzZppHtCrTLHVvWLWYAlqxn9PsK3Nk6Ez7vBtgC8KiVJu42S3Y6qGxIlNtsmsRYdjfJdfdyg%2byAgIGUCQ40CGaQz4mYwvirJAgPB2RF7aEADzeSUoOs5Te9jr3r844sQWOjUQB966t83924Qm7cJbgQYeFggAMRAZU6g9IOa%2bSEixzIoAlFkoOrdmg%2bqtJ0ZUjzA5HfMBstR5BzzcUuDs3HAUtyVP5ir1e%2bFwrM7c%2bZrTcXAqbeXnJwbp65fObDAHphy3sUMvCWWhX6GcA4FgQYaj0ITX1tKMGFH8L9psEsuQL/SiyzBzhPrIcFgQvvJxyMMO5emnKw4mI8NieNxFgkqOI8qgkCgqahHuUCKkmPQr9p6G5ZD8WsAMTTBbn/uA9DD1JQk3RrGHusDcYdizLm2lzKOs8n8h3eFZCSKJgHANNkWhS%2bQodkMG6K96BYERaW1hiWFU0M0I4aArpwYS5IZtgrXw6A7zn51yyYQdCZgw4KOZkAYy4RTTSeCw0wANaxG5YHLXQoDmpybdxXZfxTaY350/KXkrbKXXjw3FZ8SvuSPMtcVmPURabcH%2b2/uaYJ8j36MfWbVZoMQ8KlBxUB0u1ORo6b0dx8SrOVKiX7Uxq6Lm0/2b3t7Jf/60V3XvOKZd3rTn/tNZs3zCSnfOaiF1x176wkqOD%2bQCoTmIRgnEt8gMjZKNIVBe4jwNmw7PgeUphxNo%2baeMo2kRYRxMmnGbGFtvabPQtER8Fq0kxwod2U5FK5DLCYygOxPYoxwb0Px%2bEZHhky%2bFw08GgZVxnbOAJJqnik/IBod4fojgfwjnfID1x63qMdetUFX33pwQe8G669/IwjlnU/4oH7uy67efuB3XvPfeV/O3Pnbbfsp9RJKcoqVPeXB%2b6qQbOBO54%2bHRSRSAFte82JabKe0QO9KZqrxFS9e0Bzx9cIihpMhd11h3v3se71f/eW1zzjiCqju/30Szff8rXXXjcMs20HUfBhYZEfhgYXWwJD6lASJxQFU%2bQMFqhRDzhRFUx7ylKZ0enqlQapcd%2bNA9ojml0XFdCQ6FlhtnNkMQQVHtROL6KWkQSstv5q57jcDEBvEFEL129e6KuB0LEsfHm%2bVrX%2b1tNX3i8zvZajjUpxdLCz6Qkw8Lqoxzz%2bZnlNS60rAfQjBvyc1GakNTgG2HhUjcWy9Pdi37m1%2bpggie%2bpMeItX%2b5qbf9Qfm8z%2bMrG6/6L5NTiiMv53tvnBJcCqeLry5TtmEX3o3Kd8Wvpc6P0dCHRUaYe29nVbe1ZBV2nSOjNr4x/UbmPsFoFXyhHLe4KGPIiN0AiNn3xAeAr084uK/WAepDewK0pB%2bZG3ADNflShVhBSJ4JsRmR0sd%2biCV8AfDuqkBd3cychwWAZ72tSQb7VWCKTsDPdU2pjJgHrZmBmsV00opjSWQO9yiIwMEy4SVCFhAUMOc5eZSv4aSeTQvLAgNasq0w69g1nGxRQGgYNnhlQJp1nBHTm1oyNrL2HbMY42%2biQCQY%2bD4IApCxGfoS9xzmb7oJ1APCxsPMOkpF9oUD5UfQcqoYCxiNPgogg6VHE60jj6t2HpzfkIgCtcNmZrBItarqCYVSxCWQyWMDmY0EYBr96yFw0GZaBrlcksmqSAFtXGgZfDJmJgoZPtWFM/ZpPMfJ/RvKdzMyi0eCDcQf7zxIZSGPg5hLJPjELEPl1CjDmtbus5T8EBh5yHlhMoowE5D9DYpYe7LjOAqBf6WwCrgjBifYdBfG58w4woihrczkPBxvQpDd9vrd4Zw0NsQPWHtKgWtOn0CJ7yuMAV1Htis4d22LIdHyHLQyhdYc9ZAx9CXk0HEa0Z29ESebSkGrk1D26/r7F664GzUdBAAAgAElEQVT7l8%2bfvZI95Fs/8O/bX/n6516ztedsXuwRzSE5FVIePRlICyHTMRaP2jeAYlnTbmQxyrKr9IVHLbMyhkH4th9EAqqpjMrPPth3NxZtPVh2Y9PDpEAisaUmpurpQOMO8I7GRhvuaRNtBcg3N4cTYKF8gD1kSLTFMPDYHsAe22KfE8bzHZ9D4943xQ6/e5eQc0HFo%2bc/xqF3furb5/%2b/V/7giuuPYLnMEQ/c3/qBb21/4VnPeH8Up6fffvt%2byhyfWfQ0c6nmi6%2b2LrhYdpSB7pQLMLm5VEbXwYsjjIjqQUjrWg2qVep0YBjQwVpMVdeh2SijzftiCk6o0df/4/5PtoYPXHHp23511Wzv8gP8y/z7HR%2b/%2bb1/%2bbs7du5H8ssc2PaMotShZsWV2YY6XgwT1HI61I5a1ALTbh7YssZ0pesYZ8ksjK5M96t0AJ%2b1exFNwCaQmUJRybaNvZ/a/KmfN%2buNeT%2bm7OjI%2bpAZiC1gG3IDABEdAXLK2oYxK9%2bJB2PtVwbhZXcb8bIvGH7W7MNX3mLy%2bWVrIeA8f8Dyttcz1/XErUZY9vKiQYACe1sbD4tKZeLxe3nhRFuw/MZrXgppCRufM/WOQ4tIkp0Yo6nPT1RiPnvQWascB8/0Wtcdd0dxquqegxfYAqxIwSiXVh4XmAlwl2teDrjL/RJALhr7MJfKjGPzxx3Hvt9oo3K%2bpST1IiF3tOrtuOvVdfFdrx%2bNtPlKPZ5rNZgKsvilE4EqlVYCME%2bDlmHsBVynfpP18AD3DaOx73VjZusXh1WaRBKrcfvhRxbT1yEkiELpKvAX6c7AAPOQICOaDIa0GEKomzFwt9tsIRSZEX5OVkJJkDV6fIzvi2HA2/PvloQIx1TQrsewP9PvljwDYZVZUCDOXGJk5WjMD6tUn3BNECCdFdp7dq6xbiRr8o0TDo7Bmnd9IMxPAfNSlErlPDJDAEkMnHfwWyIg3QWYH7AEJ79PmO2AzSzGPVSRDLs0CJo8zgO4qssKQPl0TSQ1YMdF3y6%2b9EiIZZ07wHK7R/UJqa6jRaAE3EsrKTuPfYs2XjT4zVadgwIG8QPpQ6pXn5ho8IwB/Ovb3QHVTCIwGHaA7kKuM6AoqPHfej6Q1UxVpbItTTQlsdYaVHi9QNh1AHfMDsxwMi/cjlDVtp7r8NFmaA89N02kRXCjrwuActXi25SVEoD87JuBZDX3VE5Q7SfUaPk06MbUb1RpYjhk9x04zEAuE0cYyV12eINN5AEvoOhgxsh%2b8wlEv3/O5eeeeMzmr1z18fGMMYD70c967tf/%2b1OdjQcPEfuhL2huigHOYNnRo/KEU74IAeH7u0UxJZWsiGRQPNnVLYZfTwaMm1%2bFHQdDD4JtGZKDjzuGzFK5DH4yg6%2bTIdgnJDKYPTCMu47bZkJMJk1MMMVjlUlQhUTqjr2Y2YzJ9z161mMd%2buNL5j58VO3%2bf7jwtU86YuUyRzxw/9yXb3rRj%2blJ790%2bmTz%2b7gcOUeC7AtyJqOaLzr0owISelNEgRmqpgaBWC3AnAEsCLdX6gLf3nCrtj6tEh9oU%2bI5UO6s0yT/aoY9dctcHn/dU%2btp7X/%2b4Iwa4zzz2ozu%2b%2bLnfuvIZT2hs%2b%2bnulGDKUaM2NWoehXHGEhl4rULnj1LJzZoAtLmoZaQy49j2pTBEGfEJLW%2bPQjqDkCbrVVrsD2mC/bcz6gyG1OLiJfIodvshtepV6vTxubBM8rtUE8HvTXhSm5/4G/vS9SUZi708ZVsG8QAfCBYU0A%2bZqbeB0kpgZqXvdPBeSZZVDh4VyKg0YaVBX0G/fQ5lXb1%2bp9djS3TQFAr6JdlVLCvtirCQ0KjnPM5V3HGkEmz%2bObNxozC3cLBxeL9gpJXJVzkOGPwZ412vRahw7OlWhebbqGpqAgDz4lBgbw/sIxVmV9Dmr3YPtZcCiPOLpvRiscG9PTAyg2tiRPt9My6YKCrUFmdjO%2bfop/B%2bVx/4lc%2b79GxxheK1zXjliajW6vpSXHpMAaX1hgQGGtoiuO4z4x4wiJ6ohLQYA2TH1GdHH9OWkGqYwdYLuzz%2bcgDTHRiwL6Cf1dmQfRmGOK00CesDAcQgC4KQesY%2bD6siAMDPTqgCZTkeWHt%2bjlKHWpWQe%2bbisMIsPgNyw%2bZ3ALjN1QBwK8AHi4%2bgAsMFs/jBkJl93R6BwmK/StUJV1h604b5rEMKLhkSFkma5f5i1VrIE1EdqYeBRUE7M/zYACQRwD2SblFJM5fXiNYd1yR5AMK4QyIE/TtAPctTcAY8iDj5rIHMJiAHoJuz7/poAezaunbINSqQ/cCW0GP/ZLNI21YiSIOavC/MMsgCfTnRARjEMKB1qBr1qDnRoNmB8ZaHXh0l7rsDisGOR12KeXsVZunV8Z0kP%2blTGDS4wicYdTjlMGMeD5hdh6ubeOQL4A4SyXnAzeOE3aEZmYypgspwAN6hQ1cdPwqoTeKcTTAB4M/7z2cXTDBipD/qf4%2bzRDCwoWacc6oi87GfQswoRJYEcrlnWmUyYrsM8I76IBlB8z4YWgWZavB5z2jYi2i21qJkENNgjmjjUT5d9d35677%2bT5edff1Vbxor9bjwkhu2r9t28ud%2b7wXO43cdEnCNOkza6hj24MmeA2PzO4AxtOrcX6xiSlAgIPFUZ%2bKwI7Df8pbQXiFgG84xGLuXIziYba%2bIkwwqpKpv%2b0FjDartVl5vl1mfGXcZElThNLapcW%2bQkgAHwD2zRHvmYupXHDrrsR59/prs2rtuv%2b5N737js/43cF%2buo/48P0cixt9e%2bNSTt5/4qA9d/a3htt2H5ih1fH6gMMjVfBkykXCKpcE%2b7hkNIhRQGQ/c94cJ%2b4vONKpUq6bkO3U6AOB%2bcJHaRzcp2ONQe5qo0nLp3z/7zQvu/MG9X77jmtccEYmpnLhydO2USy468xMH7ks24eECaA9Th%2bpVl6I4pQa01fBqN09v7E8x464gQCZn5aWhhCtVISrDy7fQYTMAKwEMDJwA3FgAvsFQsu63H/Lf%2bF0BOIrhCEAf8E/sW8E6ti//3mpUqc3biHCxO5DtddGAQMEnWPufBbhLboTAu3YvHAkEDoelFyZ8vEOOvCaFabbBug3l9HfeT0l/n4N%2ba6aB98mMv3G6caSQFL%2bcuhFNQQs94lwjG89DM99wjQWlPE86aKOgVs7Ug%2bE0hadsaUrhepPRYj/Ly1tPNRwJDMHiq1xnXCVZVJhlSY/F9OMkrKJY%2bBP3pczm2NIsrC82mqb%2bQGmAGseEjxvD8ALWmYf8ZWMHAlnGWvOyXEfXHbmHBiiMHIcbN6Ok0iAvEk01P5LGxURfnukIDz3uTIvPlpf8ZJQEDQHQOG4pgzcBKEfbGrDNf4xMp6WU%2bE3yQ5HKZKbOu0h7fBrA686mRMfFHXjZV5rU9OOigi7yAxo%2bdXsRZUGTJiuD3D0HABoL2P5OJ2EpDqCIBlwKsAHcAcb1RZ93WjjojJHr4DOsy9tYUVoH7wA8YyYgYKYfentzIwVcF/7sgx4MDork36XSG9Gbhb4Cd2kU1rMz8DbFrEz6bqF/B8it8/gLpp1HYqs9xSwtoaGRzIhUxeHAoDrsihae%2bVwscLcxsiQQuib3ARIb7KYaG%2b28diHLzB0ECUAwZDHwZIeExB4V8P714wGz7oNul0I%2bHwH2NujF8SvRUN43GVx1apwYLBKlLg05oBglDKqJtGuIWQmeTdXrKWZS9VTzSq0mMXZ%2biCRYOD6JXl7AqOwf4JzZdeOaowmufL6lOiXlLqzkC2Q0SKYdUXuZ9tNHBgGTDdx7jQpNRiEnolYrwrrDXaaNcTJJ6AG3QUk/pnguo4XEpe5jvBWLMp12%2bvs3v/9jb/inU7Y5p98D4B4TzZkHAzaP%2bt4uS2NmAM6RnNomgtUjJ58idwre7PjFMivgfcARZoI4YDmY%2bjTjxCyV4URUXMOY4Ygdauzbqa4yJeDOrLx5aPGDNe48AApvsS8k2uRLEqwuIpEzQxhIO%2bCMgOiH9xMdaMcU9hI68aQqVZLsO5/%2b7H/%2b3rvf%2bPz/DdxXfmX8fL49%2bjmf2vFHr3vss84/67RL/u27C7RnIaRaRRiIGhihUKQX9UA8arH0Io%2baFfwNAO/ldpDyrcNSEaw/06yTh44YVWno1OhgJaG5MKWq65LfCag/k9Gn3/bpc6dn1t9045W/fkQAd0Tijz315Pef9Rg6/f77F4nchPrODG1qLHCRpdidopa/SFEwSf5wkSA04s88eSEvxC2a9OX3%2bbhF076AdTxM/FAZ3Tm06fgD4BqsuYJsgGlYMvErK00ZWDNAhwsHJ%2bLJkoNw1IGW2yIe3GqzB5YeDH5P9s8/zd/5OiPMvM3WVyx2fhS8FwOrHFYHHxv4iSKYqGsSoVoNM1%2bcKYRyciCvMpIlvV91%2buYL3ee41IGVgosy6C%2bDQdYLW9IUlT6rKw3Aq3rP25VgWRffjfPKsDhNrvRqLgjAXta3EYNjADs%2bUwbfMVVjpXrsZFM8RNq9wl0b57JginONk%2buoK44doIhDjhRRU9afQZaCaYB789bgpDSsZ6QucmNHoYD2uzLLn79fxrjraJ9gKUZbJHloz3wf4wT1Y4ZBkaWg8FThuqOfwV3HaMLyLXE5WgwMtquwD3RLBX%2bwMkB6mfWywUbxUrXeohkChSZ5DODGrb08049KpWnQZICYb5%2bmHHigfYOwS3GlRU5sggPzXI8cx7JmxNdxpUktn1PdaNCNOLjga4s6lAQt8iMkGbYkEAVjbsA8jyGWWw%2bkQikcsrCekddMVSKCdz8zwSZhFm2iTD0DeBgWNF3U1%2bWiOS1%2bb4D9l6TeiSBk4A3dORJ18XxMBBEn9qJVwfxj%2b3JBJt6J4HY%2bNkA9klX1Q/i1q3c4nhSVy0hSLAKEmoy5Hhhzkc5gsb3igY4kgVW6EJJVAdqR4DqCg10UnOrSEHp4nIF5zAtwheRX9IcigQXsO/d3w15Xkj5v3wDQhmQnEwnM7FASZ5HQ6xoUtiQwxvEh/5lukjOH7euckIwQDEw%2bPO1zsbPOA7n4rms0/KOgnoMRMyuAYKK8JJidYCZfklx9tN9Uk3X0eJb7gWjwOTA2G4%2bWxRvdI7sUQisOFn5Y3Fb8DQlOPnMHM4xeQs2WT91uzD/Z073psSae7SE9oqEll4GVa7s9JJ%2bQpNqiaBjT3EGXnvQYl57%2b%2b3d/8L%2bdtutrl75taVEmGHac8YrnX/KOc048%2b8eHROO%2bzspfYH4BM5dIAIW1Y9cURzKIXu0fUfF0tkM0hVtaAuLougDtexalnQDaHTM7tmee6Kip8az7CJNuebhzHQLTtAraOWl1ULjKgJ3fFMjsJ5j0jcYmUvkSbA/nGfi64/FCtVp0gTvbRAceiGnfQkI7tlVpcWu2b9dXb/7dT152343XXv7yIzJB9YiWymx68ofOfM3rnvaCM5/7tJ333nmQMMNf8cSHAMAdwBydqga/WjNiDEKnKIhgXh7KPswmMTUyj2peTFsxL5bW6cC0T7MHIk7KAU5xPQBPl7rDjD52wbte8NzTX3TL5R94%2bsP%2b5qMU8otfvu3sv3jN0y/50U9jyqIOe8ciUKlVXYojsGOOVIVMwTpM0USwQPUKGE6HOpykCYmRAfAA847LXur8ojT6VrVtY9AOmYwFqifgFGDZ07Fft3HR4PUN%2bNahEYAe22tFy%2bLvYvDkzyCBwU%2bw%2bVzN1Uhn4K6BafacvR9yOXtcQ8dIctK85L34X/M5d0X0iN95xIJvdjdivbyAvozbotOHt7c1S8CBSiH74Zd8NzT7RLEUc65c7RPDk8fnDnDNQUx3SJAWQduvP/kcKBkBYSrdWElvraDedsUptPYClhlGa5Va41SjQF5bWBNf%2bT6bao34DjMAKASlsht8VrD4KHC11HNeZTd50qwJDuTzklwH1WQZDIv8Rn%2bqV71dIj3vDfqm1apFNKq7l/so%2b9LteXYAx2jHuWwH/YNnEVT6Y8l57El%2bPa5KngD0JNAyDLZhyvl%2braDR18To8mwBz%2bpYI/SSWMBcr11Zksc5j/h6psdo%2bOOgTi7bKy49T/lMonAB8KMVQJfCIOMCkV9bLgrJX8EZA0J8DjDrMiufVFqGF3MEyOdBgmwP9h4LGH4FeggARHSCBhHUy4ngkLSEJng2jcUyFyOR0XNWvTzGMgH10NeLTh7bQ6Kj3QfAXDX1AKFd6Pz5kC7LcjoGpON0ama2asDOT3KpCXnC2BsNPAA8NOkAeEhexLqpgSlg7cGgc9EqXXKNO1jvwmll6ItLi8sdzdxBtL2RyyhLz4msJtiEzCWsoT2lI1WGHRoGTQa%2bYbXF%2bncAehRqAsjHwtIYfFbFZ8Kck6nkCr06ZCwA8wOvSVPVjP/G54OOAdooOMZ7KhxvqmGHohH2vOjY8G/nhN8Iib8C3LGtWFyKBCtIEFzApkQSFXGu8t6WuyY9A%2by96PmllywF9QhSahNN/mZhqEm0RTBTwzlwXytvO9r7y4AdeQo2wF8SoJigCOfV7QDAy9qzqU%2bt4VC07lHIOvd%2bIpVUQQhAEtZbiCiaadHcbEQxZh6HDu2/w6Ppidsvvvzz/3VxOVEV7/oXnHXCzgvPO23nAwtEeOXq2GGIc1pfJ9rXKWwe%2bXPTp/ATKQ2aqDsut4hjTtwLN6YDqc8OMthOaFO5KyvJZbh3GA92APRDeHUXkz%2b5nIalffCZl1c5/8N9B3DH73CewXG0vRH8aELsYgyVhQQXP94d04GFmI7bVKUdJznZRz717T/8%2b4/c8a19Nz44tQQMPl72ylPhmklXfeGHB35w7W/%2bQjHgEQ3cP/LFW8/7lScc90w3bvz2zTcfoko1I5cpg%2bKBHv3NDPvWVePX2SSh9Z68zAdhSlOTDVpfj2kQVmmYVWjWjzh6Rta3l7m0cWuF9u%2blu91dt5795nOOjASHL33zRy%2b6be6kP3nTi%2bj0H925yE9NEDgM2tM4o5gZcAxmkzThQxGHF5BDsT9JE26H2fYpv0edvnhYN%2bsBe7NPsPVcwi4wDD6hOTfAmZvZcfNZjdGhT/6y9d34HVp2Afv4adn9mYEF2nQ7GMA%2bcrZdgbrF3usxG8rey/skl%2bzkjD009zwYFeXE8%2bTY/sDo7UWug/WaNQkAEIgIyy9DRy710XYwQYOtD4dsB7r8xcGQJmHJlxbSHzuAwbm1%2b0MeEGFNyZn6OIoHX3cJVpDY1aoFhY7WkKLjmHp9FfEgjuqxzVF//bJGnu%2bPNd/JWnn4FMskSw4exJpSfOIBhG1rrnGe8wrcJYlWfO2xs3Y3Y/CvQF6fY/1cEmoB8FFttlhvsSuzHQD/CNqht8fCgBzbsK0hLNYc6nTN24UbA8m8QV4AC%2bcKCRW%2bwrmp/AeBA2w3ccOF4fdFtoNZCGsKXfqPmc5VSGEs2Gx7zfw5sHAusJc9K8DBAzz%2bc2uRjCZHZjgEqPC5NUU%2bxBIgy2EIbQoA3pnv5MnEOvSNFkwyDwXAcH5yBbtuBx6QgwigTylDrk/S5/MeLz1K2cccoBuLF/aEZOa/ZYrEQdVQg3iTAHKbbh6s5AIIJMzm%2b2gb9jelCAFAirVEN89BAbmU%2bJAXdSirtvgz1KNQ5AJAvRCJhlxeEwVA0wBKkQdAPq/nKqcHlGwFU/YMgSIW3ikK0zkM/hFAeNgetrp4hmGQYCxosSaAvx/1%2bZzkb2HobdiInALsnqU5acYSkcqwbxh2Ae4M2k1mJDP2VmUt7KsSdymstHj7nIl3ZWaAgboPm0sF7GCPFcwigVUKPGEBU41zAZPO82Y4HzMTUjSBOXsH3vE9/l4kPHlkLaAcsh3EIGDQje4fwL2GZFpo68HgY9%2b8rTD/Kp3B7ENUldkSZtiNBEc7DzPyAP0lAF6IqYj7Lu6VZ6RFowFBcb5lEI7TUYcZXqsE2vNHaJlfGKKYLsUuM/1EfMxd0blDKlOtSpIq5DJumNB8rUFpnFI0TOnQQYeCqkf/FdB193zh%2bn/94kXPGCnKdPqr/nnzs597ws63ve60nbfNEtXQ/QxI1rEf3YPdYMx4pc89s92xsOyaXFrO72HW3I9pXyxic2wDbTv77dd9YuvHZRh3u0mY8TesO5oEv2shphyIm6ZikG%2bNtRiT%2bO0BB0AD6tH/4DIDDT2WNuoxBES7Fonu3hXTvsWYjmp6dOIJAX3ysm9d/P6/%2btZXh7MXfG3cbdr%2bsn/evL%2b7n177yudvvPOexeOfvKN59LOfuGHjozY0d3h%2bcPy2zRNbDPlzDBHd8J07dn/ptX9%2b48d%2bcNUvhsE/ooH7Oz9%2b43ufeeqOp3TIPf2e2w6SF7jUqMrg0I9k0FVvdn4NLXO1%2bjE6MYD7o9YFUjE1rNOPPI%2bm3ZSQPHHUnpDmHlWjEx9boX/%2b7IGvzH/j8nOvXSZBZLWH9xf5/eaTP7Vj73d/59dvvy17hz%2bZUtRrk19xOFKFtj1OMta11yan8llJL1zg6UoM9PBxx%2bPZ6SeUBFM06ff4fYcgCUAzrU6ybaRo0oVhhrSlBfs0jESHuSApll9/Yyr2CLhfCt71ENiSAwe2ikRCLIxghdkH2NU%2bIOuMnhu2bVRRgKaokolrUtCtOnkcy5b/4G%2b%2b9pKcB5/zOcBvm0H4gAE7TkLaRSg6O6jIgbuRGbEGk/FFIsDdxbGlAMhErcovLbXMRD9md57cUacy4qxjYXBurvILiduOZxJs5WBx8wzW5Q/yxFr8Ye14ScFH43SjTL5Ufy2ka3IeorMHGz7qnjNaJdbW3msVWfjRYztNvEXbsl%2b9edwF5APsi7wGQQAAOUuBTMErZueMVh59D9tj6XQliBP3mWQkgVcbEOBaxF/MAQvAz0xOgCmCxcm4ExI8qL4eP0V%2bhNyChBN4tZ9hfddx2bqz3UPFXHO%2bZhbDDhbw8ppEQjlebKiKyXIKI3kxmnQELNDV5rMImF0A2DcuOFxMZtik6UDAjh91eZYrh1nqqpNLkAz8cVExWSxHNWAZ7VVKC4v9nPZ3MMYM0mMw6p7RN6esY3cg01mSfJtS5jfJwfXY6iywyggewOZWANIhxxG2Vc/DCxcpqkww6C2YeSIv7nB1WbWllATVActbcNOFyTfJqkaCI5/V2MWGXWvMOhwAGgccXUcZ/C5sMmHrYQXBueQGwCcP3pz8HMHYY9H9F%2b45Q07ArdVFx8GAnGd1PNbFo2n6eIaCIctTzGGlNUy7VQaqcwebL2BeTk7ka8WjnLHem%2bUmcKgxw4CCWxV9A/rLcUYiGrN2cSfEJ8X8bWsiMgQVfcqmWxR2UnHuMYBMR54qqsA2G%2bzJDlDPkh8%2bXEZB31yPeWfg/GYxq276gM6m4/xGxz8EAjL%2bc9vhHcihiKBDMPeR38yDAlhf6mkr245TAGgsJ6rqea/lJ3uXu/B0T6hfr7DEzV8MCXETbCEhK3SjhObqDao5Kc0vxGx7GfR8ut1zd5/yTOenf/ebl59t15F52Wuv2dyt1c/92gef8ac/nHU2hXCjSogiSHpg4QhpjMklBzi324UTUU3qAN43CCgO9ozm3apSysGLZyrTm0JtrtZ9wN/LaNzLbVJ%2bJy0nxkM74Z2D4MBt%2bhxcAKBDPqMLB45YzwQEIFuhKmgPiO7aFdPcbEhOJaCnPjqge39y32eu%2b8Ghb73zb798xRvfdPbGp55AxyZxTBs3tE7eun5yB7Dg445ddzwRbSmdM4C6vF1yFoR77P3fuWP3pU9//NF/vZb7/rOuc0QD97%2b7/Mcfqm/Y9vxjG8nj7zSOMqh%2bijGkHxcJqf2wKLS0XIOhIdCxXUroUVN1ct2YsrBKP/ICmnJTOhAT%2bQ6ic5dOe55Pb339jz5YXfjmu1fyU/1Zb85Dtf1v/eV/veTvLzzt/%2bwecF7dj1Ma9haoUvUoCmH9KAAewL06OUXOcJ6SYJoEuIMtmyJ3uMA/J1zRWMrQ6nECqCqfwUDzWMoJqKNM%2bYO5jkatMiKrsfcheIP/J/p4Tg4VYC5/A6AXTP94sO%2bYip6jEh2AaIA3kFecNGv2BwCOxWb7bUlO/rkl27GDAw4AkDRrJEH46bpg5uAPPRqIYL9cph7A32j4G7w9Xhm4LgH%2bHGjUJGtH3HmKZFyR6Aj1wLaYxmpTCw4td0/KYL68HuuES8Wq7CRYe%2bAd97ky%2bGV7y5HjqP6XJTmFDl%2bLTjGgHWN5iX0AOANMTjQhixEGfzTZdmkVWlSltSrQk8qDuFqtORcJCGVM0WMr8OYZBHOeOK60oUnfNomnei7Ynv30Gx4lnpSfx8sGQB774FcCJGi9YgYjlzNZdmfaXjIbgwB7BAPS4rBOU1UkBQpAbodNmq71DYtPVJ9ocfGkxWGTpmomETJJKTbAfb6f0UzLYXlDb6HDjHpBTqe8v8mqyjt0chzOLnLchSG%2b71LiAXCb9UxbsgoZMwELbS4ExsxeljLoluJQ5de3POu5RMZviiuNrjYuAjVjeVyZJNckzfLYhWTfUArJJZVJ8lCXwkFyrch32Ig2VjmPSwD%2bo4v9ypSRULeVgVFndFzxt4/FLCG/X%2bhHfswONgroZasCBUwGEc0PESAIKkEAgV3z32C4oc8218yVY1X3Dl/xfkITfiTymyG83CVhNgBIR/DDHUzORgNxYePlO3auCTsiSzEjPfTqvfbSxNZKIv1rhElXYG2x62hrld2AqceC4%2bE4OCftVwDonKwbiywmDxLkqaAqM%2bQofCWuOVJ0CjMIhcwH5w82nK0ma/gpenjIg2Yqsh7vF/707H8vGnydoQB7DtAu1z86I1MQfw7vC0ENt9lhMu7aF1TyCLnMZAhJqEMudNmhsO4JAAlyaBZiqvtE89U6JXFGs72UhnPwUHdo0Y13X/r2S86658Y/GcmzO/PNd/zZe15//J/6zeomgPEGxglRUNEhA8QhlYHExbZ8hESG8YCNqI1bD%2biWTX5M%2bxFwArg7RibjxnQo9Zn0m6GY/LrMDo9dXAkGdMnJoHIekT40hqzCzMS%2bRTn/LS2iSU%2bcjaBzR1FMldvwZqVACJ0AACAASURBVGZb/EAF1fk%2b0a45oh91Y9qQOvSUbR7deMfB7zSc3p279%2b6//FdOevTJP959iF76nON37D8A/Zt7/OYp2lIf0DE%2bguQxi5Ia%2beOUZRQSff5pZ372j34RspkjFrjDIeWc15z8T%2bHxW5%2b4ec9w44/3zlOrgX5u7pq2LHxTUSHVio5En4WISdwtlD2MeC4moq1Tdar6NfZvn/ND1vBV/Iz8AzVyNyW0%2bRif3viKr/75WWcM/5/LP/CLmRpZ5jFY08cfv/onl%2b3YceyzNznptkF3kSuiBr5UiK1XHJHJGH27PHCGwasiSXWBp2IBDGDvpiy1gksBn5JoikUB6ZpO7GdYCYBVzkXBu5aOF5bb1tLbhxGgI0BZpT3oGpgd6MB72NbMqz7fSG8YSJs2ACiHi41aV9rBd/GZkwcUOAe7jQT0Q3akU9I5v8mftRo11uHLywP3p2DuVeqjbL7o9tUqc0zRKgMkAeA5F0FUCrkO9nBvQy4pMBtqHAVmejm2Ph%2boSyDLdu4oS3f40q2JMluew/tTfb5VmRYfC/uuYNqw%2bD1TZbYHAVjBsNvyHz1HvMgA0suAfuRs8uBCvPNZkmOkQiPtaSRJAOJ6PRIAQBqkMwqyD8wCtJqQ84jbkn2Ny90jbRMJqGQjsPQMKIx7kDYiByLk0gSedfM9F6sxLjuQvECKxE2LfICoThOBkW0wY4/8AI8WBgac92AZKoGS5qHkMyH4nKU%2beGYk1wgyo5nW/2LvTcBtSasqwRUn4szDvfcN%2bXKemBMybRkSQURKBIFCLJTP1lKhtUEzq5u27EYcC6kSsRDtcigLB8RiUApFQZwKBGnHFLNomZUhB3J40x3PPETEif7W3v%2bO%2bM955953X/IyJb%2bvI7%2bX995zYvzjH9bee%2b21NamY15QoR9gSgK8ee/Xy%2b15fUdVxlUptLGRCzTB%2bPMR7v6B4o1OYJGIqTSeQ79Ubn%2bWeeX0fKk1Jeg3vK0oGINiPHGDn73o6i4eQktOTfWwrz7pS94Ie%2b35cdviOjHyFwp4gpIvLLJomYhSKF7%2bqiZkyFThajnj2qOAyE118EgRqdY3q0LteaTptPPfMus7p3eYJpl4%2bqlPRlIRUo6qoN56AXWlKcU5PcdG%2b/El1jsoNET%2b5w7WSgnRgl7rtpPBIwqpSYvxNksbdi6YcZqNZz3nrvB9/XqC6DZNUNWHVCl8RdA%2bcek6hkiOJtk4FKb%2be2ZWumq88Le/dklzd85K%2bQ4PCpuQFoD91CagzbSfdT6UxCeAfCHind308TNFsa97DuK4898lEgTvZnf1ehmG7itrmQLzuBO5pnODM6RLSIEASppu//K6dd370v1z%2b/X77Ni//2ef83Uf%2b93dMUb2EYkfVpADu3G%2bLoJ1MM0%2bHnWsjKTKiJuPJ7vLVHSFgjyPhtFNB5pIwwXYa4UQHOOls2yNIIF53vle3xlgXMeYW%2b2c80nMcC3VOpBKPjEV3XfZBJuzK585en/OYVI8JWMTLUY38VZP9km06HSbYySJc1lIjgYbKnWeBze0E118e4TGXM5nda60lFFy4IYpua9dZ6sb5eJBTZBle/UsfvfFnv/8pD7pazcMWuJ%2b48Vdv/K%2b/%2bZI3z2f1m3v9MU7vxSKwbykpTE7lNqXHI2DoWV8UOyTpM4ZcZq4g0%2b48RStjmfkY15%2boYzyuYoIKtqMY3QlQjTSkRZ87t7f/3B%2b97BN/un/p4cVp6p/vryOP%2b/nnbH/m%2b3/1zBauO7UToxr0MS5toI6uS0oFGs0A3bGGTNuVrmgja1s52OT3ZPco4sUmQGZCqFAdbcF/6J6V92cead6DAeZVFBv/rqxQjgBp8azHCzx8BUM0CNQ4MM95kTxbuAMMjAu3fckrr3QhBeiLEpFFsrSvWV/w42cr8wLUqFIOtn%2bc78nn/TJqQGpHsWnoWCcdgkImFbM4lYJ8fndOQYxDvMacFuO8JcuOz%2bVTCEBZkr6Uz%2brKneckf5gJaaGglaedvMy9z0/GkzqQsJ8G/qp7tXuRJEgHrPfLC1g%2b3vbP1UMO0Z450JbIjlJk9qUtrYh8nKPjv%2bT18qMKeXKvJRq7KAXbqTurY6M2FgOgeGdzoRBZMrpEMmZ1tCvjBfpRvpJ512ZNCItWCJgvt7BWdopUrGBJrz%2b99INsIUHY3Ha%2bBC37b%2bK8oYwkaI92QIPAXOXoBZwT0Be9np/Rk2565AGi6QBxtS3AvclIzawqnmn2woKXr9dgrgD3T6o6T6qhoB0rqbRdsk6hliSGhVO/McpLJekjKbeLRAjPV60xGmXuci4tqDqk72jkTGxF9TpJkitBX93LaYjiCQaJj0iAVhSrao1w4msKOnNvsnZK8cYbZYbzg3t3rL5qlJtCqcWMER6pCaT0ZvNTG2YC9FwCKfeil11Ua7zEUuGgO4DtywOyj5bFC95Uz7fbxxJytUqsFaEqaC7yILbGE5BT%2bjJqiBExGmi1W6HRUGu%2bphEEub7ZRzY%2bvRSYAqT58NCSY13VWnecePl9FZlDjHeCTKmi2gpFYYYgk1VUTRaSVVR7/QwZXeCTBDv1JqjlsNtNcPp0CfV6CQNWRh3N8F9%2b6jduuvOjr8y97huP/aUb3/6Ht/zZpbXoRNUBd1JmCKBJlxFsvU9NDJnvTALSrQ10MVE5Jmyq6g7n6t1UAXeuKGOD0QIVJU0MJdimF56vJ54UNExq3xOQ39WPpGiT6MAzHYX3tlR9diuLcCxItBor15sVHv3pOEG9pdcheK80tBgnBeB2xsD2LvCIy4FL/JIF%2b7wnGWaHeIfW7QQRZMDr3vx3t/7xH931no%2b878FNVj3MOnnI239odzvyhJ99ztYn/q/X/enfjW%2b%2b%2b8wU8XyKdo2KKCXVZnW3w8V8kgQ5pcPuUqdYz%2bNOWa75HBvNBtYbCWaTKqao4GwUo10CNqnlSinDURlJaXby13/izc/zB8pD%2b/SHu9pTv53Z5U9/02u/8%2boXf/beFMlogFI0RzksoUrddlaIFU%2b7dlPxhE3X0I66SKprCCf6s0RpSPG%2bq2mdVBlidgms/F28U/ux0w53rw/FXtInWLRDkmjpzVaouV%2b1OwJ8peBopUozFMybr15/XUQsAmHPUYB8RaPLxgSPFQnMFTz%2bg9rCrplTgtxTLBswfjTAklxbpNU4ChC59kx8Fe69qNhEEiLNQ402MXq0FX7pg0MmJOfqNy559nzvcdlbb3P9A5mIzGtMT79fdZbAfrkKbTHuD2cc%2bPuLYWEGgvPW5%2b95lXa%2bS%2bD122K5eu7yaGFzd%2brqudexGCxIea5q1/MZSjxGrjtOzqFr8Fqa7Fs8Gyk3tmm0Qe%2bS7zynSEnFWfqFMzEuuHWaFTnXcqVkeyYqNxnIt/PL32Wl1KxVtUIz4oHy/ploO6tjrTIU7n2nMlKOflwXwO9XZNxLmlgTWVp7r9oq/D8BPsE6ixSRE60ed%2b3Yuj7Qe04AZzQZvTs%2b22J/PNcHp7BN94pm/QVgT4A/K7c8DjzBsdJvCDpK0z7m1baAdHra%2b1IdVhV3ZuTjuwqyRNCr%2bgkfoU5QkoyLwlTumbS%2bRLFxTHOKYRLsqB%2brF9Oz6QsNeKXIkNdt86KCZCvk5CQaaeS0m5K8qlNDkFNaRKmm1kRlrMos3MT7HjvPu9OWd0EBbT3qfpMaU20V9BeOMYJKas87KpDw0KlWI4m4BXCnMUKaC0G%2beMHFEHH68%2bbm5TG8hru%2btY41lSTQCnVHz6E/Fd3KeZ1hwj5jKjxeBohzpSxFIryk51Vjl5/xXdGLfElZqSadyQzUdG8lM5GFlPzgmeaf9at1zBjAilN5fWfvmGFajqTiObdf/p0v/mKr%2b%2bGcunvixl%2b68b%2b947v/ILixee3RHQRMUCXzJnHFkTY8iozNyTQkKP/I56TWfbtO/XOIAg2BOzXa6XHntpspBexIKZFz0tOejhLszrUa9dFSIvdpywdBOjeh55QShO5vukF3GOhx1VJpBLBjkD7EjaOV%2b8uoJl/I8enlOwN5zru/CoGwjUcz1aanQX9dJ0U1CiX518f%2bhwXp%2b75L15c/vT1/xzvf/ak3vP7WB1e05IGsl/vd%2b0P6%2bXe/9m9f%2bObXfNUv/ve/m1z3j3d3Ua0SHZVRDym1VWwG3Pmg9UqK8YwsdS/%2b7nZl553FTGSr4cr1DL1hRRJTO6U5diZAmUkjpRKqkyp6JXzhw29/5zP8hJCH9OEPebEffdPfPOGVr3jab1R7uPlUL0U86KHZDjEjYJfk1DmSUGUfCdjXqiyMXIB37Yu61NGTRcDOMLF28iVEd8h78ndbXujPd4ovpWCSgGsC7QcAlg%2b6r0Wvf6CqOOT4u9LM%2brdSavaj75zvuZe/9%2bk%2bpnm/UGXWNO49alPTqepIUq3j0PvRAuXgc5VnUiYBuXr5rNosfxeVHSl04yBLoHKWJpuZT34rdM/P94xiPBUqd/vuzl5HaVJNmNZtlTFwvutZAS0pnuWp8qw6TgyEpSJY%2bbWXppL9wPTCwuD%2bWLbZDrrOQc8jRqF5Gz335XJF3nNlK889a37/yiTQ9p2rx1z144vl0cbv4jP7Fp8ZeivcY4zYCbUnQ3/WQrui4JvceQJ4VfTM0HLUHeYIyGcEHhFB8RC9mXrqDSPp3wN0py20I5WS5Eb4K3QVzmGiXENeuxJ3CabJedcGzERrfhGItyVZl8dqAixBuibC2hRIg2DZP8d5k/94bvGjOyDLfnSuXKVLivToa4ukITMcVMqyNzEVq6U6WAd0EjohCN5zOoJo66syC6unErCK8pK8Kn2j9LhzU%2bqMtqZx8X25RFkfrANSqUYAt6cA4zTkzQgQAJzz4x0ryAFyfYRUwDIpNGJCMeHQSWSapj33WuCne7aV6tsXlWOzkIC7iB4UijbOyCvZ9wr87f55D7blhgE7m/PK89Z4HcpPss10ZBQylgW5avWLsYTL8ZgFxEIBvW0S3CNg5njuWZJhHs/Rr9XBt77DGhoBcHaYYLYZIA6A9VYZ/%2bMIbrvnbX/2%2bvvv2L6duISSkK99zTe874rLN24OKgGqc5V%2bJt9dPO6uMiofh%2boyOyNlFewOFdCy8i2ViMVod/O5ed35NATuJo5DsK19AGKAcCNwz0e9N/nl2MvpyJPqReDOaAP3Pxox%2bVbPwdmGCbCk5JBPL%2b/GOWVpRFTqkXrWHdXGB7O02YhZSMKgj%2b7%2brvbqR60nqJYjTGKgQ6qQ92q%2bFPAuPAz1DN7%2b%2bx/8p9e%2b5Lk3/MkBw/FL/uphC9xf%2bIO3v/q9//FJt/zJp%2bbXff7Tm5JsSWX%2bWqTWmS0mAtxjfqdTzirQLhMSPe6srtaY4bKNJkbDCJ%2bLygLct6cZws0awstiXHNDBR%2b/be%2b213/Lkad/ya3/IJ5AdNu/9ckv/tF//ag3fe6LiZRProd9hOUQlXKEecKQrC5m9QYzr9fQriqA71S7khVOLff1sgL1xaXX0WI4WKn35qas/YBb7sVdet4hw/OtSIBiiz8HWgaaP/l3n%2boX7eKnH94/H4gXz/QhADOTaoeetvyD%2bEou6qmtrfkKLbmV/Vs9/XEeV7ciV5ZIy338RNkFqo/LU2C7iQqPaz8uyqYtb%2b%2bAbUZjwVfcsZwBGitKwdHpJZfCXMR0eXsQQ6kyjCXg6le5d59/mJ1YsJR0J8/NwquRS069fb%2bv%2bA2v3r6S09f39iu68cJ78vvZfqD8Ql/sqgRf/xwXch3Ob6Ri0dCSHIZ6WeYynkMq6ToKEs/PxbE/VqNnmW5kFCLxti0oC82F2iJbTIB7UGSNLkq3r4BhhXdyHywwVWsB7nO%2b3LntO%2b0DtTbARFFH3REPfrVVyMXyOJdPo7KdCo37cRPt8gB9gnV67t3PvamCe9sE9Du9Zxs7PJ4FnFjIKfexy3kV4POXcjxAN6YXnPemb8aO2YubaNXJmScvXqUn9edI1hs5UxZo4SnMlZojIE9pOmm9ldNvaBCQcpP/nPaR0CtP8MHfnXGgTw1RjunHKkmrY2wxklSrR5h46lCcJ0irYfEfFrWalbVqKNtlMkyEekMZSinilEeszRpcjkCs7vH03udGgAPvM%2bYOFA1e0A/cqW1/nrEilWA9%2bgsjfIEWmeLukpQ6HUt1VUmiJd3GvOg%2bcJdqrIvfiVfd7sXbV9rOn1PcsaTo8L7NC89HkIgCDYo8MqGNzvGWS2yaDe349FTm2Y9CQ8NXijC1CUCpJZRh1KiiST13S1BNMmTxHD1Wki0B1b0%2b7g0byOIEJynjfLaEcpmUmRBf%2b8jbb/2eV3/iPR953ytEU/ztHzj1wcpTTjzhhjQ4UU1V05yAVmgy3oJOmuTRJucGYGus3HcC2zWWsvHUYQik1x0vnTQZm5KN/07PuG1RMxKazCUt4OwAuLwDnOoDl3U0ydT67Ym2evXzHEQqWA2kbADWA/Xa76RKf1FcrID%2bKGkzzmvPjxMnsbqVRNggNaem4J/JqQTtomXP41rAZXUgIm2qC2ysAWf3gOPry6b3hc3qYsSkjKJk977z/R%2b/5Tue/5X/P3Bf1YSUgnzEC77yZe270uOfvWdLrCeGG83L1CoDmyO%2b8AwNVrwTAO8Y6svmCj0xcpEURxoV4UDdO1zDTjRDhzQZAnda150qjjdKJz/w5/f/97f/wFX/64W92od2b3rbH3HT037%2b256EZ991dxdJMhcJSEpm1srUbk8RVxwdJloTbnt/toYg3hW%2bZ5ZmQpMhPUbnXc/DXnLCXkGG3rQtXi4WiyhAtq9AoZMbi04QpPcFlJt6BvWBMzSbXFBSNJulHLzbcqSLS7AE5vX85wPvF7PFv9wAvr9Q515/5%2bm35%2bZYaDrPdK6vL%2bXnXdVaB8xFEccVy%2bKx6p0vlOdHLkl2Qad/qVqtyWPy%2bOJaqopBgN8TzzwBvWrfG0ef5%2bRw9PXrqaAzoHZ%2bTSsfcxtOElXNkQVRVx3j6ncof5kbGXp9NTzcddy11RCp5YWufG19uW%2bnxJPnGrgIg4c7tGwfawp7C5pPL1rhW17ZDS8kSnC%2b8zP3Jn/nnsd9lQFgkSDfu3R%2b780%2bFtc5T2YllNU4ss3yKHS19oG/2z%2b/gRXf2UnsfFKhtYVWpBx8OZS8c4/%2b0SJgdw/Yn/qEViXBdDhfEdjTOz9pot0k7YdyjEMB7INRJtKYPEkvbqFJKvRsJL%2bvlQnkm1gr95FErdyhYaBdPK7JEN1Yq0wTtJfppS8zudLfzm11A%2b22l/xNTrwg6cWj/XcrxlF5tgDkeY6FfssPLBdFvJUhygKC60rlA/XEE9SbZYQT5cPzewJ58V7TIy9UEfVcC4g1Wkm5KV5g%2bc5pulOmUqgrlJn0boTJo0KnmRq1pUj2lN14L86rrfxzBeEGpPUTWx3UE6/3RbqNKyy1gq%2b/3FV9I8PAObFCWQowNSVisOBxt4RUaUfPkAmBskcNIp/fj1AcZIQTuFOqdcyKqk163EO0JrNcWYYcd0pC0uPerdZBUsGE3SBJsbOXID2bYlQtozcsoVrP8Na/Pv2WjenuZ9/9UzeJrjtFKb76UVc/o3RJcB1GCtzpqV61buafucRg47j7%2bwqh1lGYOAse9xRm%2bB0BvKtnqMmnpMTUI6TjBN15JEYiPegE4jbS/T7K9pBk0iFAKg%2bpQUfDBJsOuOd9OgMI%2bGkAcEsC4LhLmuXf9M6TisN75XWoAUFwvhUAj%2bvosW44LHQLf05cOWkf8CHbg8YBi30Og%2bA1T/umd/7apx5Envv55%2bwLfYKHaP93/PmpDz7m2Iln37U1xX2be1LpyxRlRrNQwfrSPDmZRTLSBTZ6T861jmGkRpTgsiN1BFkNu5Mytssz7M1Ik8kQzUsot8q4/qrSyXe86R9%2b4d0//aSFogcP0WMf6jJXPvMdN/6fP/jMr37l869802fuSjAdDhBFAcplyM80pTHj1jp6YqhkMWBYWsPHe/S6V7rOzR5gL%2b5gvapmcm/aUU4qVTvaIQauCpz8dCEr3qR4dlr6vQL1Anzrd%2bUcjHN/2Y/a0i7oRq87w4fyqtRNmj87PfE8p8%2b3Ph8NwE/MO1QjLu20agImmB9MZkt82IPPvuo%2bZBJzccfDAr/DGhLLdAm37uRa%2bPzb58v71BtT3tGXoG/AB%2bVsk5yi4ynw%2bHx/q3Yr1/HoOmYo8DOCdnrbTbHI17U3EC19itr3NEYcP5%2befTMq/MRgvyCWb1BYXxJg765rz2Y5AhaBsLcoXG5XMIvGgWNYaLTBVine24iKMFoRN/f2r3qZbsXSLu2kNZbVLrhAiq60UiFY%2bnyBkvQAqEgH9UpyW7UyMPMdmLSs%2bQ77bfoI3ohw7rA5C%2bKI19wH4ESJXIXP561fvtpy43nnJHjPSo5T7%2b0nv6aYV9cAevHFZd5y3nLKKpIvTwlMWSzkPjsVgngmTuqy3XC5q0M6zd0tNTWvEsNhgEaTBh5pPopigskwT1gdjSC8fF6n2dT2CWP9uxRkaNTphS%2bhNNVjhG5DD77wqR1sYCEp87bbYF2C/Kveix6tL8IiXUJ5iGboJWV9I9JvMtAbLwDMvUJ62tNq3Xno9ampXENPbP6W2ZQCzJUW4nvqed1cacUv/EQwn6ge%2bkJIwDz6S8EbetanBKgzVY6hd50GhL0JGgZK7VHQX2YEQ7TWC483%2bV18ghzI00CQ6r3aLWlQHATMF2kyWR5B0BPY3%2bw/jo5jNCnHIlODxSobHTTqdGyz%2bFKzFeVFuQhc6XWvdGegME8yy0RBpYwUvVpDvO7dcYqdnQQsOTA%2by7Fbkkqr950tIaiees%2bH3/sXt5Iu83O/e%2bd//uZnXvuCWSO4jkmsl1TOTUg1bjnftRRkcrRAP3GVr4n7EfRf2lbPuc0AS5L8i9STTPnp21kEEht3nTffnBZ7pifv3jDf2%2b4IkqhKO5WcfFvjCeDZFy0wSvDvurR45qWfFgEiAfvHgwTlZiQcdwL3HiMWU%2bCRlwJr9YtHk%2bF9sB2o08Hk4b//3OA17/vwP73n9bc%2beOoyD0vgTmD6W7/8r/7gzGZ4XZqOcHpnhqii3PUsK6FeSTAiSCevvZxgHLvfHZgXz/sScA8Dcp9aONpMEAVV/MMsxFo0x06coXxfHcEVU1RaZTzp5vDkK1/0pz/yiT99wdsOHpb/fN/%2b0rs/eUuydsXTv//Z69/1sX/sSrioXCFoLyFOMtQrJczTZY97T2To0lBBO6d/VlFdI2B33s3BUMG1eND5e05v0YQyjhyjuSx%2bHzmPujV6CSOX2CYTAPmuLfW62%2b8E8g2XLGfnGvaZga/JxzJoncYrByz358bzLHvjySWkodFuX5inXkD2ASDpIG/KqrevIAzoMzrR0oVRJkUCJ4lYhAcCJll7vATRL7WH%2bZVq%2bU4NvNILZO/FpChFG5%2bgQ5J0dXYvEnCNojMTD5Icu6RPL8WpPClNgnQD/r6EqEQJXIEteZ8eX99Ueph4a1EBYdfmlXD1hS1LemphsKL4lpzXNO95rHcvAtA8%2bU9eR/qXVwlXK9YWcqL07hMurDIseC0CfiYD%2b5QjHm/GmhoxE1esSyVANTrBQmChaPazVXndLg0kqga5glx%2bH1hW%2bVn4zlYXFykwLz6jFn4eg/0uRb326fs0r/fmTaxHyoFmnkC7pklp56ZT2vIqvfeALrvkQyYgohFAb3quw77q%2bGWOk7tpHueoN6LDVGkjmHaBcsc5B0pA4oShqQpj/mnpt3MQuEtnl76uc1SzGaDESq8cww7s1wUAaNVWUn9YsZVFoQyoDkcB1moD9CZNOS9BlnH76eVvh%2bqVlwN8t2eJFJmB0HIMYsjYM27Gipbkd1SjYeIvvfwEt416iFGeWJ1JUiufhV5eUmdYxZUPxN%2bVWmNjXwF%2bOJ0INWXq5Pl4LIG%2beeoJWDg/c6u5xGKdnIsbFI%2b447Tn3nLy0MXrTiCunn2tAKuJrYXH2wPLssQEGA9UPUQMZC/II5x3evOdJKScwwHrnMLjKC8%2bFUYUb6R7ahKtJqOqhrrRhkyNR%2b4/58w3hWbUKc8wC%2btuMgcmdDq5mgxse2vz5VdmHne2uyWjk1zGePZsCozaFWTbY8zSEqqlOfYqdayPhjgFrbJ7ivKsvRSn0xK6/ZLk4N03G972e2/621/53Adf8LbXv%2bXjb/ymb7zxmdVGcHN/BFxa1uRQAnS%2bHmIggvAjNZWBJJDmu6K3XeZ4N5Ro2O%2bSvlI3ZsLiSF7UL9NzUO/9tOOqq9af5gnyGhvO47030n3Juefv/IMUGf7OobDu7B8zIM0jzvWc5yHthQ7XDuk7c4DKM6TQcON7EtnKKME4iHBmDxiFwDAGnnICaC8lp9q7eaBedz4jl0gKy/3eR/rvCEb3vfMlX/fg8dwflsCdGdPv%2bq3v/oPNzfS60WyO3eFUlFIEMAhYn18QcE%2bktPUMjUoTV6xlGAwjfD5yhZem5Elx5i6h1iqjsbf7mTf82G/927s%2b9m9Xlso9YGV6yL5685/e%2bbZrH3PtY64pz2/u7vYQcZKkt70SIE7YuQLlronnShek/rQjSaqyTtHt4DZOlAJchvPCg96kB5DAvaJAXbSnNdynILvwppvHffkn9zOgwVLgPI/vjea5uKkhoOfjfdpE6ift0whot5lMmaHfj3NPffEMOpT1XEWVx5wA4PCAHxbkvfCeCaalX3kj2gyGVS/0HF62t5MZGDR49Jz0XGn7WhThIE%2bnGSB%2btOFL7VRabGr/aWCVx57X1ByC1bKVNg5J0ykKVlErrVDwMYDOfZflODUBqZD6NGPA7pKJdiLV6YpdKSgvCm6pXVHIeQpIdwCdoJ59SJKU3RSvxsEkjzzkairOiFCjRbM1xTRwtQBMuUf6qQfs87yBvJKuglKrIryQd0D5TpcToNhBC5v5kQyJRjDeyxuWTqvVdqnWUvRxJmAG6E2orrX4nSTThcrrlzwCB1L9SsDymYedhbpUZw5AQbmwhZxjw7j1RsXaSxpYLw3AOrK26W86yoTPnksoLvdax41f8MovedxXHj9XYH%2bOe7VBeAAAIABJREFUl987n5wmA8gXJ3CvdoTo26qMNNk2WpN7FM/7jEigi2a7I8C9U6N3Xik1vYly6Pk3X0Sn2lcwLjQaUmzoJswwHNPAmmMwKokCDtVy6H0fDmlQ0kgkrWUs3HweK%2b2bqbwkAX%2ba%2bxS9NprPZW4cDAjMVY%2b%2bkNQo9ptLbRIfVOmkJfx2B6pHlB9sKphvtCL56YP5AnCm%2bTH5Fdy9ipCJmw%2bZQDpIK2iVYykMZSA8p80QWHv2loD%2bKg0LR6WR82jH47n4uwB3B%2br95pBzkg7jgHkB/H05y%2bW%2bZRO3eshFXtL49wToc41siWzkUD3%2bXO7pOacMp4Dycl2ZSnS86FIiMo4slCURAW9toP448wXy6t9LfHL/7sTjPkll/m80y2I4CbWjWkEnnmErqGC%2bO8YsKaFO4F6rY30wRLfdRLeXgpU%2b47MZTmVAb6%2bEjWaI0/P45O1/9flf%2bP2fvulnvuEHP/Pqn/w3j/uWehs3JwMapI677uyU7YFWUGX0nRsrjHJjYurmUDnu8riUfiTgbwlLR0G/exA%2bOhNKyS036own0S/f7SSayEoDYG%2bix/rmtlFkGKyhccBkVW4E7DQouFZYu0tXouoMDYmGS7Z1dBp%2bJdVcOd8R3DuKDZNuWWn1nrFSjZ58HHDaC9juAkfXgM094JjjuT8Q8C7AfcJ1Eegm2e9%2b4MOf%2bq//83NvetB47g9L4H7dv/j9l/7Cr3zjzwzvGZ7Y6Y%2bQldqohwOMmYRKy79sTW9vXF/8eBVVhjQZmYlmONqq4VizhLuHHexQBjKYY3OsCQ7HKJ%2b4XkHjStz2%2bpf88vfd%2bZeFZuryVPHP%2bTf17U99/BVv3t3BzfftkibTw1onFE97pUIJyAyNWkkLGGRz8bQoTQXoTtTb3p1RYUY97cNRhqy8hlLcxbxMLnwP/VlHFrHhgCMkcMBfF7bBgACfQLzwgBtoN8/MYdRkzuXhkQvPRFbltRLYK5jXVYFceW4K%2bHXR52KpoH8GGge2yXGk77huQvBswNn28ek5FkUw4G8Ax55LvLSOEiQAX4CSedH1unYO/x6YE8DPubHN9qtq6rcFwfsD0Vzfr08eVKFW2vMiJO8q%2bD/XQLDn9Tnahx07sjAWa/KBqj0aISjmBKEGLWn387r7GSkWmVilCmTPVtzL0pTqimcR/EuxMi/vQFrFGSkWPqYRJYZIjhIKdZf8HjPScTwtf3ked4w0oAL7gmakBqLuo83mFw7L/x5NwPwC1magelA/baA060l0Q6VDy7mEj4J%2bBfZ84iBQ%2boq/6FHJpZso15u1IVxmQgHtRS2EJoN/lJzNLewFeFdpAW1b3yAwDKl7LnHk2dgiu8jMRsb3CfTXgEkXmXjeCYT7SmVZuAfrC%2b7sDgzb/TNRVZRrmqnQZnhfNMIJjGTeGWnCPyGK8JcXmTAYjjn3aMPRecLvxyMt2NSk41aSXHlPziio1L0nK1Azf7O5gC2oPHdGds6FHkaRX3w/er98LoL3KB6jNyuj3owQzsYYiiZ8Mc7YXjQAqB8vQD00ZFe0vHjtCXw53woAVm%2b60my0gZRmk6JTnYqmfJked1YJyh9t8f7zpNl8cvAsB0cOEjDuePOLso6FzCP34bmEhuO8/JSSlOlBIp/0%2bBs9x13MuxV7FlJ6JIk3H0257SEJtkm5lgNTeUfG2V%2ba3MQALgUSzZBnd44B6TkhEE%2bJShxdZjZHz/HcZxmw10uQME/tbIrTSQm7ParAlDAKIvRm8Rd%2b8iW1RzUvec1z/ugD3/vSY1de8Z2DHsDiwI2U6mp6OdJS6H2nUBhr1bBQEfscPyN4J5C2aVPayBVrMuUXm%2bl8j7sBejPujVrIoUgPP69DPGXFnniOu7ddSoxTuLE%2byetRkpL30B3rPvLmUyrpaN83b7zftOZ/sBmjbMB9BozPAE97HBPtAerbL2/WFy4UvBtw53ublbLbP/qxu//w6558/U%2bee4WL88nDDri/6OUfPBGv1V/2n1/5tDf8zT/2sTOcyKTbbrKq2BCjWSXntxPI2wOSPjNekZyq/PZA%2bO0brTpatQzDUYQpajhTjiUoFcxLCMlDm5ROPukx%2bMhP/MB/Ew7ZxXkFF/csr3vzx9/4I99z40vvuH9%2byU43RTMcIWJSSpxhHK6jiS7ogJQJX%2bTRKAfZW/C4SxXOUYa0TAA/cF50x2enV91AeVs97i6A66axkgPPbhHLFWMKD/sFPzGrtjq%2b/PKxCuDV2y%2bLJoG9e%2bmO6SKfN6g9nRn3fhFMG6i2SYocfFO3IbgWb5kzELhvu20RBTUKmMxrNCHeh4Gw0YjGhibctsj/F0qPKuZwW/5dcwQylxdgajoXRu%2b54LZ9iA7YzwBYNhwuxFDwjzVe%2bUG6%2bKKdf56chAu5/nLT7WcE0UBh1CCPGCwZEvxTOPdCiTHu9uoXQ0UYW1QYzeD%2btqDZEWpoaLRDl2IFiRZZ8b/XisHcTxOWtR2L6ICdU%2blHpPPUXBSljC511aMRhpNYeOXBpKs0J6rcUEkmaaIdDTAgj9eBfN5LwATQfhftehndpIG1aJAXcOslDQH6RrXozQn8Rwqs3MAmMOVxnWCAvbSFtXCA%2bTmed08Nhw9BRRyiBXrcrQVZiyJywH4J7AoQrgxEqtJMDgEUgt4XwXNuEtIoaxSGVqMyx8g5k3zqSBBmCJIpqpUyhu778ZhrEL28pNSwABffIT31pE1p0TXb9DNGUJRrL1765Tzffca1Ppdpxxc7LTtKCOSVRqMVrcRjT%2beXo9bw92rNKJLOMTZOUeNcuCTrSsk%2bGgNsuvJMqTeMDhHk836q9UjAO%2bk3CuLVIPApOZKk6vYxIG/GgHrqA1GdCXIDfRHaGOjmp3INAe9K1bFr05igt/wclR3PQ8AKp5TV5D300rJ43fuzMtrlWIpf8TlHgxjtcoJBQmcMnUmO1rPinTByxSqfTQq3czSXVFZyOA1Aobyx47kzQXWvWgfZoyyktEPgPk0xqwCzbRZqAsZpgEkQAbXZydd95w//L%2bMgPf3nH/zhV5cef8V3tHcQUBKy5ZRlogD4PPnk7A9Uj3FeanZtJn0eczrv5h8RTrhXZdVGwapuJh500lPHKjMphoADyfzM6J70pnOjp580GhlfTp2FcxSvKSkTTDItAT0aFg70W/Ks78SSU5jl4JwiRtE51QUGFWB0Bnj01cCxCkTLncoyR9b0pw1r/u3g0aFXR7G7qIAzYIIzcPsX7nzNj73u07/2kfd904OCEx92wP2pL/r1E9/wzf/iTS9%2b%2bvUv/sQXehhNR6jVWoiptStGq3ldMkxiZjKrd0o6mqdNXCxyAcIgBjFTp91AOcgwmkSIS1XMuyX0j86wNSnh%2bHqEOzZLt5367D3/%2bPZXXftlqShDCcj/%2bJMvuu0JVzeu2%2bymGHR3UY0ihGWIt50Z6mQKzKI1hNOuRd31p1BmWPhkDWHcVS67eI8Y/Ha15d1%2bsvA7fjs/4u8jr9KZvwgYiD6AjbHv4PApNEJPEPBe8DANmPNzcsRNrcan4chk4CbPwSD2FGwscZbAnEDdlG34U2lBwvMldzmnARldiJXjdOicS%2bnhNUoFZajvvPs5UK9gOFy8DwvtmRym3yCrEnEfSjWdw85cFysfwLwlh72u7Sde44sQHbjQ6x5m//MZA0b9GY5m4oFb3iQJeqw5AT6Ck8rFF1HKdD53%2bQGuWvCImnBCi1IjIHOF16wkveUf2Lun561VI2BvoJRoTYh5ZQ3tcCQSpVmNxdx0hcyPpSSjK/Im1KrxDM1aiG7awnoNAvDF048QAxo2TsKwKZx6utyKJlnuOzrte5DXPPCueFxQ7agYzXQPqDChtQvU1oBxV/5WDZpFyk6jznwZBcxMRiVAYXjcFm6Wq6fXbaurIggll3RepeG/xPvmXMyPqkwa5M9IAfhokkhkJonqYkiNxXGg1%2bN1RR8%2bHqE7a2Gt0kcakWJziCIIrmNZixy0%2bHOOMXEA63ekJAaBcrDVS%2b/AvOPQi0485StnY/STioBZep8JhAXQDlnGvuzoNDWhW0X0XtPbztdAHr0DxZqU6lRBKBVbTjBjAi2lKxsFuDYPqRZqyjzQ7yWh5vSYMXpxWcA5NwPoNt4Kmo8Ce4L0TiXGIC5LhIHHdqI4v1%2bRmh6RalQYNWxT3h83GjkNAfJKRzKH0FAivkVCKvcR%2bs0owbheRWc6w7hRQdSbYeyUZVgssYYU/VpDgHs6pVRigDODBLMt5YXP0kDy2CZxgr%2b4P33/%2b3/8u3/uV97109/16Gde/12dUQC2MqmyXG/KJeDsFjA/BjyyBtCLT2DeMb65A9EsvnSWvHRGjdg9rfN4fdkgl7/Wd0cKxjdHwDHnwaeH3y8QJhrxTqKRKT%2bk7pC3zmsQkMv3Hu/dP5Z69KTVGNVM%2bkqg3HdGu/mM5MtzG06U294sA3efAZ56XYJyORKxjlXblgPzF%2bJ1t/F/cjvBWiPEPWd3fvcZz3vnT%2b7%2b04PDzHgYAvefP/FH7/0/fuuv/2r67DO9CSbTGdpVctpDKbDEn7r2aZIq6TE1SUoNMIkJ0hdfFfntIRJUKk0cayUI0hS7yRGcLU%2bxN81Qo67rThWVqzIc3T3znj%2b%2b7ezf/c5PfeWXpaLM1c/8/Zfe/f/8q7d%2b6k4%2bdybJWKTJhJKUCtSqlIEsRpzJQdKbQi%2b6UWHYdsphJxcyRXAYbssBCMY80Kt2oTeCE9qqTcF6YRQoADelmWCFsaB0Gr3nxTMWC5HRaHwZSgPt2jnoKeem3nwF2TIBDDOXRFvw7lc/k4L%2bQuqS5ygrmJf8ADUU9JyWG6BefbZVEQE4d%2boQ3r1LbJVebs95HqURS0b07/d8BsBhE2GX8wF4DYkOL9GU5R5CXSAejM2A234KQsV9qgfsfM//YNzjqnOyrZjgul8lXQVOWvH3fED9IKWj8xkQvAzBuyUhL40g9%2bf%2bCaZ1So86L4lQaRoVjEZToYCIkUHPvuuIBcj26DAEi6I8pHQ4evI5b%2beqR6xc7e5CjIxalHvsTX5xN25hPSw88dydRsBaTcdSb5xhra5c8O4ow1qpi5Sg3bZVyMR9J/cseugK1IkVpTLjJMNOWJXfCYh2ehBvKXM2LVwvkoj%2bcDanvcPzlC9mot36OtCaJWjXJkizEsqRzgmjtIQJHctubJHqx%2bJOpOywvRTQX5hE7rLW%2b8L7dgo08gTuvs3rTu1xzq%2buDIgTCtbEV8699Lrz8Qhc%2bZkdz9OQOsTqrbkXPlPASs91WqljPIwFWI/JwXc/CfpprBD4C6%2b8XFcKTlk99Lm33TlNzaNeyVVpVCNeEmqdJ19lLk3u0gC9Rgs0SXYshoKAc2d4cNrSc9bl/tuVGGm5lif68txsGwJ5GjmWS%2bC3gYF3NQopBemekw6ygJXcA4zqFYR7M0TlTLzoVJahNCQJOCzEJMB9koDYJYkTnD7Jfg1MWEE2KmGECJPNBH/8od/7oa951pO%2b6gVPvuJ/ah9rXkf7qJkA286JyRd3JFUPPhVj6OEmIF4GhTJCeU2C6IYCbHLjbV0nJ52Am/rrnN85RqkLvzdWekxOuSnqxC10NRZJouFB4M%2b1wbj0/k6rHDq8V268JxaO4j3lXnl3z0KPivRzGsj3ngEecy1woqIykYRDpN2QarTR0bF7pPPAPe73b8Y4tl5GNcp%2b99tfc/vb3vW6p/7Rg7GOPOyAO/XJn/K8p70rvmt6wx6TSWbKHeUWMDkGA/G0c6szVDmLUI90BhXg7q87pMnIYI9xrNlAo0LZxxT/kK2jE8TYmQIVegXCEo5cU8GH3vvFt9zx91/4i79/93O%2b7BRlnvrtv33iuV9z/av%2b/S03v%2bqTdySIJz3UogDzxjrimNY2KTJUk5nLQhXOujlwSUTHnXKPJQHw4r00lZeqeuAPVoQ4uGseBM4vpFMve/JXefH3Sxw10L%2bcJFvQYwig1W4uFG%2bynBuvSbcF2OZ9LyfX5lGILJNFx4A69zVDSGk9OuxyQ0AkNa0AlS715n3XBNZ9WsnNZibJuYLamh%2bYq9m0lY7jRyj2eweFlOcBb8mSttxNcmES/rVTfciTdT1FHWvHw7x7eXRVKV2Q/7RjDf/Ye/efc7kIE78r8hn2D1%2bvuq8HAvLNULiYycTna7ODIhbnjWaQb72gwLM/SF/dRgU6lTk5myN1XnpFA8X5Vt0LK7Q2XFVff3wtjHurIYG5SxJm3ssMWXkd7agvifWyf7WFwElCCoueMoYcS7M%2bSvU1DLpbaHaOFsm3E6LtDgInCC9Y1RnDMiK9oCOfgoBkMsmwW62K1F1IHi55vFJhGxjsAGcayK6ZIjhZRXal%2b5lH8u18IbB9KgkeUVMQQQk8VoJ8RDRFVg7lfGQ/iLdT8jC0jYUu01LfNzn1jASQOkPP/NzPHj3nRRU0n/P1JQJ7SWJ13nJZU0WJpqA9Gng3Lrx61k2xRi10O4Y/Q%2bGA14VPbxQTAmG2qXivHdWQnvhBHIl6DEG8Fo1yfIsAApxpAFDBhZ59pb74HnU/q7pIKDWOvnndrQ0UxBtFZyKg3cC5yGlmzCFQr7vlA9ATb89GY8VAO5/D2ozed6rgGAWH7cPnEUqRo3%2bRMsT9d7MQLSb8l7DgcZ/NMlRp2E3mGDjgHjvgPmchppNMjidVJkM1KmHcTzFEBT/3c3/5i698%2bdpVJ776hsc8Y6N2A5uvNWd1U1fEyNmSW0zqlIR7p/Pu1aiw9hHqCD3yBOROZ51666YII8CdxYTdED/vXONmA0akCNot0Ei7mUDcElK3hlrEyTH4dIlzlB3e05HJFNuVqui%2b%2b9f3%2b7ao2YyZ%2bwjcexZ4/DXMWdREXeb6sQZQDtxdUaYln9P5hkoecbvvbIzjG2WUo%2bz2N77jY2/5kZc%2b8VfOe/AD2OFhBdyf/fI/OHHF8dpT3vjq5/zhn98%2bwhbjH/MpyqUStuIEV7WbEhKpBsNcApKBvXrZA%2b7%2bE0tiKgdkgkq1ilY1w3zawOeiEG2kqDCcxGSKKMIlj4jw7l/8yx%2b64/bP/8M//s0rvuwUZWjQ3PKKp/3GZQFu/vSdCWajHupRCWlzHa1sD7MkQL2mwJ29n%2bCdnbMV9VTD3QF19iF6g6mGEM003L2o4rbPYk6vYSsCw4DnmOwPoGOuOuQwBkCTIUmPtsPzGOXGP6fRbhS4BytpNufSc9T1ZCo3B3mkCwrNuUm6PMdywi4/I9AkF95APhVy9L1QFrCg5vgJrZagq556LYLlV541Y4I/VR0oQYshbQ/l6734/HqPKOgaTSMDdu5Cn9%2b8LibZaW088ChC%2bWe5pr9%2bUkQbCmnR4n6NshSh12NegXoe/evxWXu9OdptJgcW51yQKXVtTXUge0677mLSsRlOhXHmnyenzpq3yj3UqsiCPe9BgSozxvzjCdK0HzipUxt7B0RT8kjKPvv493Cw8UGDvoPQ0UgEcM%2bYoH5h4H2R518sfwtpo06LXz3q/jZHWu4gjDUxXu9HqTV1J9/JUcDkWZljPO/4vLIuCbBBvCPRCzZiP1X%2bejvsI2NmnshrBsK9lc/r4qMWb1xHgFQKhvjpeeRCT%2b6vtW/ZJaiyAnW3WsXOLrW1gfIGMNwEjhwr9h0y1H5UGTebFWQEJTyPuAUcohlup9oFpAgPcJqi3e4d0kPJdel4LUArBh7RnOL4FRUEcxrFJYwSTXIej2noLE63NFwCqtw45Rl9/zp38G1E1J037fGl1j/fn6ZOw%2bRUi2hS710TEKjK4lFDvJoeC0o2zbIq2dCL7hRdBCBXEwHqugVCN2Eug8hWMiF2kEjCKxNDCaTpeScNx57LjrME1B4j7byHPEG24bz0qgsvHHV3Hv6kbCbbR%2bgzrTJEHcYl7ApAzwF35AwMBeAE7nz8aDpBUq1JSxO422b0oSI5frGVmfvC/Ys%2b4nvcgUGrgvT0BJVagNkkQ79eQ2Orh51GUwy9ZJbgFD3uwxJmWYpqtYTxbgpWQv6ZL4w/9rzLp%2bNHf0Vz7VkbjRs4bJjiwePWHE1FeNmKhdGZA9MMOEIKytJ8YpxzthHHCzcCbG7mLTfwvXLGsMRSHxG7gktMPCWnXuY9f1i7nsukWXrwN13xYhoJxr3nfTMKtrz590DjgBEJKuud2QQuP6ERgkoKUM61OwDWPPB%2bofx2G2G85pm9FNVyCdUabr/9E/f84bOeeO2DkqD6sALuj/36d9z4pKdsXPPW1z3/D3/7z3rYG0wRhoFQZMYThmPVIh8mAebxGLWyvlHxwEsYKp/DdMCTR5imiKImLm0n6FQzqZi6FSVoBXOcmQC1sISwVELzayK8/8f%2b%2bofu%2bvg9f/rJD37nJ883yT2U31/5pN%2b88ZYfeeZX/8g3X/emj30uRjYboF5V6cfI8dvJkWvUKAO5GJrmpGPeXna8lB52WSxVJrKXcCHtyoRELqp%2bt3oxP4gSs3JgOZL6hVq3/rkMTNpn%2b3mnRVfc4%2bXb/gVXX1efZS%2b6fy3bVxYt73zmQTZgaMDaVrSCm7/YCqa%2bU1yz4Oqvks9cdS/6noyPX3jxfUAv3V60940CRN5%2bof5Dio5x6dUrbRVsydU3ZR4nxyk3QQlL7kPDQhWErNgW%2b4wBY80PUD0QUfFxWwGYiyiG33bLkQ07Tigl7vw0niRJ2pvB7HuZAxytaTEBuLge91ls48LgyWsROC4qn5PJzdqG1m6auCdVhvcZ7D7Yt4iNb1wV705PYKpLuWSpqzhsRuA5l3GhZ6sBwO/9a%2bp7V8UkGjl%2bBMI3HPS887wKpY3HnJhiaNPdQB5FccdxPtBjzOOuR9IbzE%2bSagflaU8LuZV78ndAAyF3y9mViplAX2uGpLImDoRZmXNPTyp0ilJFpbNIPXEPrr2N8op7SKvrCKc78txp%2bajCkznQKffQS9c0kVESTNyDuRcpEUeCdnrQS8AsAXq7CXaYyCi0FeD4Mb0P9mom%2bt05QkZPexQBBOX08u1OlTojC/o0k99N2nTBoPKMQU7PV1SAL06Au9MQKe/t7gluvLaMm46HuLyWoFafIyiF6I8pP5mJF95mZD6S1r/Q6p79QYD1yhB7syYauST8fj12n46838dSxEnPJTrk3n5F7EWjjwTvHqtP9qwa6HfH%2bXN3FE/Q9z3aDlj7L8tPehWVmop6xHPA7rzoknTa8pJOHd2FlyXlJhGKjnr76enn34wIMDKQU1mcsUG1HaPHtKsxBlNez7j%2bRo9hDRL9jEaKcN6XqHkEk/TQc01ifhjbaGceoj0mgyBY8rjPUS4HiCespJogW2tit6cc93iWIN2c4ywCbO5Q6rmEwV6MaSVE/4sTdNYCXHptdfPRT6wda/TAtA40CdrdUCNot3dFMM%2bEUUZ9JCnUoqlOvYh9k2Cdxm3uWXdjmO/e2Ax8j2cH6inXvqEbPzu%2b9Jnw3j0JUx8089THG8CWp/cunnhXXfWoK4zG8295/Hid9/S60jvdOCY15nOngcuPANcfAyrMVad84wrgbl35sCNFjHI%2b44jnzcivv/eOk7t/96grj37rBY6qQ%2b3%2bsAPu1zzh6ue/6uVPf8Pdd/UxnhK463QQRjWR1kpmY53YEWCt0Uac9jCJwwK0s1N6nSmO59jo1NAI56hVaticlrEVxmiVONkC5aCEjUoJx66ITv7x2/7s%2b/ZOT25/35sfnEzhQ72xFTv93%2b/82C3tK256yUueiGffffce4nSOeiXM1WQqlH9kckYN2OHiWeoiloQw51HnaCG/rKqLZO7IsoV1oZcsgvbc47d8X%2bfzEoaqDd8W0OmGx9Ix5/Mmyph0h%2bag%2boAebYDD581bqHc5wVZyvbxz%2b8m3/nWFl%2bdZHv6CvOzpLyrJFjKQ%2bQQoHhAneemAsFaYNUBZaOPzc1vk7NrirV8C0cqnt0RY5fTbcQYS%2bSxc6EVVgF6zUUHN8ROQuZ8p%2bCwbR/Zctk/uFV8C1gXS0pe0aNAsL/v6t89X5/1oFEI9c8sVeNVYUSOGhoX/jPuPraLd/HDt4v72XoqkZKUDqRf/HGPRdOhz%2bpONGRo8pEH5BktRd0DPo89dGBzaCZeVk%2bTdSFRD20IpQgk6HY1Q6Lum4eT3oUXjRN%2bB%2b6wZCl%2b6QxlYEd62VXvuqiX30RepV5NRZRtDirR1SLNz2960qLIsv/O7whJQ42dAMKeKVhEBvHNHsyozzyWqMTOVpqU3rRuvoSM1JrRtCrlDW1bnSKIjiKbbSKpHEc52pBCUOiLWdX2YbiKNjskY41FrURe9ZC2nxsiYdhxxetx57HSaYVSv4v5NSPSVn60f1Z93jZGRxz7YTINqmKGXAJtpgMrmFNtBiFo0x5kZwLcj3PcwwP0UsREN/KKvs2mubquHXRTO5nNcxmTVtIT4qipq904wvaqG206miE8mePxR4JJShmc9voarOhNkcxpNc2z3I6nMamcW2ozziGqLaVs9EMrX/mOHFVYVEF9QYMbN860oRt8B34LTnqLeUtoJN6OUcLwRVIuXPIqROFoLPfJGlZEDnIddALxLEhUaTFU57QbsFfTTyx64Iko8pyaksqVMVUcTbOsok9ojnneVwyR/ndcutsLqE118x%2bcXKo1QZQr5YR2vel1TQbEZQmQF69Wc4z6iUswkA1M/mPjMQkyjel3kINN5gDhOMD0zx5l5gO09oE15550J5kmG7bSJMJ3gsidW8aTro6zWR0A1VDr03EDS5FBHPeHTsB8StDMZ1UYXAbevMiMGa6ha6sfo/Xan4zMQQPMzBylEctI6JZNUuS8pNvyM%2b/O89IbTgGDf3XDefxuPBRULIFCn991fKdwsJXfA%2byd1hxt5%2bOJgYwRBC91Kou8dp4ErN4BrjwMkYki%2bAI15CnM4AM/jt/aAozp1LDhm9gPyBty7vQSThCp%2bMWIkt7/oe//oGz/1vouvQPiwA%2b5X3XD183/4lqe/4c47DLi7XpOlCFn%2bmIVXqtQtd1x35xWxt81OSZ13PvgopsU6x%2bVHyqiVmbhaxea0gs0wBpWuyvc2apWoAAAgAElEQVSECK6ao1Ip4/Z/LH1hdPef/cDbXvcND0qywUGT40HfPfXb/%2bDET/3A47%2b3ddn1391J0%2bsm/T6qrtBSpZyhLAmpGh4jcBcPiQuTGTA1L7t53JnUap/JT6HM6NSyDKaFxztSAN4fpsXPRinXGF4F7rl48R30JGGTybBUtHCZWnmhi0DO2WqUHtCCs0ytIZD2Qa%2b1qwFs3o%2bf1OoD72Xag3n6ZQ12IP8c8O%2b9uGUQz8OEWsTJO%2bAiW4B5U7iR9l4d3MjPvBxJMDCsINcHiArgNBG4iCxo0q5STchLNkWeVcbIcrKw3YSAfof1lic2H9Rzf/vboKF%2bdq63e5nGQmWGC43MrGo7vgepJMmiJ16bL%2b9r3/nUHT8q4HvBC0/5ucCYzyf90KOQLRs63GcxClEkbBf0pMVzax9JxONPahiLoVmStxkvKmNKKEBjjBGSRUoSPzfDw/IuzKggiBd1qQYNjQytti5Nlk/BgkRhSvUpTUDoTtcU9LuN4LzZ0jHejTvi5WYf681YjbmL3nQNa5Uu9viz1pN6Ef65uA83npe/81iC%2bXV3LM/bru6hN11HJ9pBUqGwnc7raRYgmu4hqa4LmJ9Xj2h10%2bkmksrR3NtIPrvNTRaIZNEZCvUMqhUM9wBGKjcbyAjcRSXGjcl4Nw0GSYbTWSBqFd37Z9gmxSMMRK3ivj5QF51uVZaplAKc2psL4Mn7mtTSULBEVY%2br1wNJQuRcfWXbSfamet17OmWEJ6eYZCUcqwPhHHjuI8u4oq0Rg0Z5jsm8hOFIRwn5yn0H3k02UsbmeZLYH%2bg6xOMOTHb1TizceQdmzfPLr3Mw4hRWbIzanFXwwuFoKtSbV011H5Qvq8Pw3L6Mo%2b1PIE6ePPc30E5KDFVxCi%2b8o8Q4mUhJOM057AbcddYzXrvOMUrxMb4/37N69d35GAGw87ifBPLSx0oBho0Kyr0phnEgSZWkyUxJAyZwr9axN0ik/kw8ThBXgZNfzBClIait09%2bZIEgyfGwvxLWNOTauDvGMpzWyWhcBhYuyNW3rrdPAsUudHroLPhGrksBmPjv2Jqo7GVYQ7zzXChZlIgBnjRsCag%2bMcx8Cf27CX3drmK0puR676xOs/7Sr0xQ2vLwSnoctzHPRAOA4kuV2qciwudbl/J6TwOF2wQ40npkncMcZoHEUuKmZinOT0TQm5vLabQfeuT8TVblRYebYmgJ5FmhaXoP89Y6PQOAutfKCEoIwufdxT/y1f7l758VXlnlYAffrn/mrN37Xv/6Klz7jGU9%2bFYH7LAtQCUMklILMMoTlOmoRYykl9EdjASLSZ7yn5ARtBZrGSYCZAPeK0GqioI6z0wqamONkJRUOYykr4chlFXx2C7fhk7d972tv/epPfSmT28U%2b9sjjfvY5m5/6gZd%2b/ovBdw5mMYK4j5oUWgKyFvntXSQsfkKDpgbssrhSqAthDso9JbHl9iqarySOOPHsiadcOcfyvWtfAb4ooT9O0KwVJU2KY7TwyHAyl8x9dnShGsho0Cqu3Ph9u66GAL3Gy0mGD8biw3sQYLvEj1f6xaLc5cI7dNx%2bAq/9aDq2v4Fs894v0xo4edhEkAPcA4C7GCKugJNcwwyeFZ41n4%2b/HBUwmowtkLLwe2DaV/1Z9YxidDhlIL%2btrO2WQTjvmZO3D5yXjSZrMz%2b5VRZHLoruHfm/%2b7kN/ufnG2/7vV9hUaxwr6xSrJE8TG8sLI%2bLVfcga8UBlshCKNqdQCKJzuj26VEWXfDvzc%2bxsPwVv4396FNB7TLznD5cjbAQwK9VeujOOohYVTTvF6ocQiAvalTVLgaUSWwE6oWv9pzHX4GlRCgoiSjhGH2gAelMLlGbRd3yIm/lLvqxFn1rtoD%2blLUmukJ37M/WEMV7YhTQQ69WM0H8DnpTBe/tiI6Ho5qMGmQyRnjf9l5Kk233vVKttABdiI7QCzNMe3PcH9QQDxKMj0VZ1XFxqX4xFsAO7HGRvn8mlJrTcUnm1lM9CGgvlwJRgzm9lwhQJxWAdJqdrVS%2bz4d0Bmxf3sAjJlNxcogjlMDFPIEpcPlGIPOi0HYA3NGu4K57YwxmwPOPZ/im68s4UU3R3iCwKwnoJ32mSQ34UeF1Z5MbkM/jFHMX7HA3dDELux007owrLzKJlsxaDzGmS9QlswqolcquLkcoihFTWlK83Aorfd65UFIIwllEKi7LPMFzsB%2bvlWNMnRINE2J5HDcCaSrDzKI6ZmP1wNObbpt42%2bmF91XPRB7IVVCW%2bUipcuIIFOlkA3eZ9Dfeh3jfXYVaA%2b9y/XFBreFY8%2bUgKY/IPhNWNImSCapc09OZo8r0E0msnE1SzMrAbJPVTUss/oPB1hSleYZP9CJc10yxcXWEZzy1npX7CtwDqqbsArsJsBEBId3crv/xnKTMsLOdYdYqgEdeCWz23XNl6vnmAxsot/5kMMsMRMEGzuDdrz9wX5FP3QbCo%2bpx57l3nUNs3clChhGwtaNv/vgRj4PP/U6NgMvUnb/gcHJrov2ohMAdZ1Vw5FFXavSLUxLHjIMg8s6YrMrNElbt3ndd4ir/XvbIy3MwShcD290Y1XKIo53g3m9/ze3/5sFQlnlYAfdXvP5vX3j5Or72W7/tq171V3/ZxXgyQaeZIQZbWldaDZ2UkKYjDZYuPaEA94rzuE8DTJM5rj9eQ1BKUPaA%2b/2VBOV7IvQvzWRCeNefpO9/0XWfeNWPvfwpX1bA/XVv/oc3PvdbvuKZ64P5zTtbe0gq61gv9VRKqrSBZtDNNVGpN8zM8IKrrkmq5K2TOiPa7o4uY52VzbeXrmGdiynLdVshInJ96SFn6Hs8R5vgTSZeLhrk9GmwjJ%2b1yGWUsvAsxMLS9MoXHnihRqGJ1HQFIRDp04tYN/AfSMImvfr00PMe0gdJUvCgBedificgwhJ6PdBLkHFY8J57ugm0V8hqrgKwq5J3/cnOp8fI0HFuCzFqlhKPVwFbfX%2bHb6llL77RbHgGv42WqUqHv8ID21OpMJ7ne0XSs39mPwKzfOx%2bd7DqXRwmAZvnY7sZXWe5boF977%2bLC3kndr8iuWghfuH3c9CVFmo4lErO%2buDCT832MqsnEwgHUmE5SjR614pYaTmV%2bYUUPQX7WvhNAXogFJocqFe7GA/mSGsbCKe7SCsb6vYLA/f3Okqerig96jloklviKFptGfEp2iwINE8xllyIEgivqDrx0VMhTs0ynLg0yghyCNbjnTToJxl2ggC1rSn%2bKQmlHPypPiV26WUv4WQ3Aac94bSTg7uTgkCBNTSYZnl6L0P9hgaSz48RBgHu3Sjjmt2Z3CU9fjKdiccwQ/kxDUw/MxJ%2b7%2blLG1i7f4RjR0OJnJY4f19ZkTH2hx%2bNsX4kwOPDDN90VQlf%2b4QAwXyO4cxJSI61KisBvL1/X4fe3jN16bm1SHG40LDWAxteepSTnBRqiWckc/oYj5NcL97mAtFLdyjZOPD8QJJIp%2bp5N2nJpFpHORliMKuq5jxD6G5uIsWFNB2CcsULigcsEVavoVKN3PI8FndtvwgV9xXAzwRTx7VjG9q9mkJZ3a2B1jN5nKjHONlIHs87FPUietzrFZR2KQkJsBgtJSEJ3Olx71XqAjbTWOkyZ8eJAHfKMcZUDNuOZa38pzuHKNXW0Hpsguc8top6zITrMJd8tGmauRj8fR4DnUuB9VQlI%2bnhjjeBo0dVfSXfHA9GuOkWhnKg2YwYNsVWBhxzbb7pfqctYJ/t0MMuL8XjxwPY3NW2IYQ4uqGvfJeDe1fv4NiGKuMwOrCyu/pOF/Ltt4ETR4Eeu88eMJ0Bj7pKxyqzIkUz3s2p9Lr3BnpNJqz6vy9z4XkvBPBH1nV/A%2b6be7EIQDAf4A3v%2bNitD4ayzAUssV/KCL04x373az/4wssb8dd%2bx8uf96q//Av6PEZScIAMPoL31BVhykeoT%2b9wT8q5n5n3MlyJYksJrlhrCHCPp3V8MgrRQIoavSRcDIKSKA78yYfve8sTjm39py8n4M6CS%2b/%2bnW%2b7bXgW182YpDLpIatvIJx01fNToYqMGjNSITXo5hraEoZyoJ0Dx9Y6oZvSmp4rWBfkJiBcQbo2ow1PBe0tapTLxKVra7PO8H0x0sUjK0Dc6ZtPuMwGRQljqRyp%2b9hmnvjBWI8j6G83yugxIVLARHZO5vvF6WUP/lkM2K3y0rNlfdrMQfQba1cLHx4GnO3nDfZpROeNMrgmWgVWDxN58Ft42VPtGw6HyVs47NvKowweVWCZ9nXYc63crxgSOkJcEtWXdM7DHLx03cMcciH7FImoLolzuUDCwsvUqJl5%2bxfqKRjp1VacFStukRhPGUkF7Fl1AwELJKFIwOQlhbtulp2E6gJEyRbi6Dg61W3xvpu046rn5WJNL/Yl6yUkaSaR1vu2EnxhBlzbANYuiYQWnnTT4E6WSj87Qw8lnBkDG80Qp3YTtKrA7k4qAIDJqFSt2GQBmCAQr3uJlJm9UFJ3r9nIcM9OgGuPZLi3G%2bDajRT3CD9AN86I/OzubaULlq6MBMxfuTPFHWtVXEEv6vU1lf1gJV6hPwGfP5OiOy/h5AT4zvUEP/rsCqqtDKVShP6YUpGai2AbgTubjfQZbtR/l0iORfs80rAPDh5Mb7xGkewGAtU/d5KTCoILD7nRZbgQ0Tsuqi4SdNG7tTwVU3axZ6f6DfeTzwOC7bKTmdSKp9zoYSd9hv2X16c3nh5686T4/Haeo1DLWawKzuh2nXQgp%2blubZ8XZHL3zejBuFZBh1VTS8CwVkV7MsVwrBVU%2bTBMdh7NgHiWSZ5arZSiV22I17g7TiVKs/W5GeJaSYF7mqHL8%2bwNsbszwy5aWDsS4UlPyXBZwKTrUD3M3vhTNOQkR9eBDjueo5cQaG9Yvpdb/wnqj2fADjXaSU533ZiAWqJDBO3Og06QTs99eAxgejg3Hp%2b5z/LoDwNq/NJdw68TwM/lEi4yxLyXnRhYLzuN%2bKUBzme75Chwegu4hEE4d%2bwugb/IggOXHQc2AlVYs2JPBt6lLzQ1QrW8GZ1mlQqNAPcpsNkrgPtbPnDv21/%2bvGteeu6ZvrRPHl7A/cc/%2bMKNm57xPc96dPTiu%2b9k7KZITjXidlRRclUyG4lnPUYbWVxkNLBj1cqaUDacUG0mweVrdQRBgkroqDLZHPdHCaJ5IMmvx6%2bp4D2/98W3PPHS3n/6wZd%2bxZeNx/07fvxvX/i2//BVv/Hxz8eXzMZDlKM5qmEJkeO4V6uBeKYpu8X/kmhdaDJ7yRo6JeWQLrMBTMWBA4cVx2Ryp6ceJaGwsMOk5TV0or562pusdqhyVgdt4iFEJgOFoJ7nb9UjDOlOcAo//jnUwCKgL07M69Eo4D2LZKLz/tP%2byqltjs5jD2dhOx8nXFTA9qWNv4t29GGB4mG9wYe5sVWY0WgAy7jsnDwHpyUs8pcezWjZ436QMbLfe1ydU6EUL/YZ31hQ2pejY3mgRdaQFbQw7az7%2bXIXW%2b1C%2b1mRL1KSyNjFdn4e1puvT7HUGCCYPlhVyp7eKEAFxi9qR/gtJNG9aaFYxd9l7pY6E%2bpl1/wa52TgZ2XngXfAXr7LQbzRjwhszx%2bSY8SwGgT4zFaATw8z0Cl6JYFsFmBnBvGY907PcFdWQnfKSo0htkYJ%2bjsq%2bcaCrlSRECpNBbivG0rhJQFCoeaRmMChvkudbfnZF5IQj6QencXoAXwuqeAx0Uz7Z%2bLAlZugycXF5VQFg3jer9gIhf4o1yoF%2bPzZFB/%2bJHDr04GndjI899EhmutUnpmrc6XhdN49jWx7F6OxzrWUluQmGvHNAtzzu3bLce4PMzE8wH1UN14rq0igr6S8eanEGi%2bXudSCT7w3rieUh%2bzNVCaSQFzBvtKyJKmV9VwoMemWEykORWlKR9cRFRlHi1kwdIRWk2lRv6XnsuTH5S8EuHtRBN%2br7ljaei9iSKQYNysobU0l4kE99uAoLcKpJDGTmy0S1xUWXUpxOqtLH%2bO/HYnOBtgcJYi3ncfdgPvuAHePqsjiDI1gjEd/3RquXw%2byxhjBlNQyVxtAADJb3E02HLuMAAWuJlm2DQSkptC42wJKx4D5FhARkbt8j3RPuzHfRYngfccpLm0AKQH8MQX4OaXGU5ExHyDHyvZU9dVZ%2bVRGC5lsdCKSM04DgrXZ6HifKf2M11wjePfmSjOFaZy4oLaOEVO9IXCfAVfwOQLg8oZKfm/QPvMm3FWzhw1Vo9MYlcauw2sQuJ/tToU/f2wtxAc%2b3v37533lxlMf4JDY97CHFXB/6Y9/8IXrj/3K73nOdZ0X332G8YyJC08pl53MzKi8CNzHs1CrpdqT5nxu5X3PgwTXHWtIqDTJIpwZ17BemuO%2bMEGFB5UiXHptGW/8qc/84rd8ffDrP/htN3zZAPef%2bJX/8cZ/94onvuozdyUY9QYIo0y4lawUxoSnWk2Be4MUFBdWHhD8OkpKN1nDWrkrk0W1XchASjeXkK8Cde5HoG6betmZCEXPzuG7ZINe9X1APr9jqe%2bFhV2AeyiUGnrg6ZEn1YbbyHn6e1QZWQBjQU7BYYa9JL9a0qvMNNoV%2biNH9ckRv7uyA2U%2b6MpJqT6WWcY1PPwQ3tz9gO1hWvEg4HVBoOwCvLTyfpfaiEZY/tq9978v0F0AwZbEXIDTVaB%2bFWhdBcg1MboA42xH/z7EuKSBOEmVt13TRFzLo%2bD%2bjObIGCFoYb9oMopnuRy6FFi%2bhSVLy4dFICrncS%2b/R96f9b%2b8y6waM3Yuyjdan7WTHdJQOBdsL93Ned%2b73eF%2bIP0c8/cw3db1FT2WND0D6DYld1PNu%2bFGmcaO%2b91Ors6EXSSVjYWf5oOnIyGabkmCqiSgVrkqrwbuBh6ikiaS3jMO8flhhp04w7XVQMAiAfv26SkmUYjtswlmG1XsDhMMu6nMnTsE6%2bQGR8DJbiR0BnrcSas5c/8UV1xbxZl7p%2bA18s3QIMFN/qE6VIbHG2idGWHOOXcODC5toHFyhMGJep4VyD57HRKkBPScJk%2bQ5gmc6KhS1KndVKQj6YnMmhG%2beS3BS66lvnyA0aykvPeGFm4ifcY3Xkmlkcqr1jiun%2bRJra4E/X4vm%2bCy8MhL/O9Q/WLlTly3mAjqHDoWCTjHMeRoNrVGGZRo5ACk0gzBMEE5vedxVINIQTJCSwAfs6hTUTRJ9nFa8ATQLVe9VXTV3Us61whdcdc2rtw9%2bQnw3DuXw/TGPSPh5NrzWuRas9WG1Sqa5HE4ysyYj3W0gqg3k6TlbJridKkuhmJ1s4udVlNqFwhw39ICRNMgw2CTHl/g7mEVUZYimMW48SkVXLJRxolaKNQbJ0YlIHiDZQ9IidVLYy1y75MAfkM95aSbkINOIB%2bROuNoKxKhJ/i3qL2LrAnmct1A%2bhW/d8PBn/7sd9nFtQPviRuBOr/vxsqDl3bxoBwTQRvtCO1QPe/c156Bx9oUQDoPz8Fxsh4pJf6qDUmZwYk15aUTuJ%2bcApcy0XeslVVXgncaPZ4CjdFn9nrAekdpOL1pgumI%2bS4lnOzFZ1/28rff9KkPveLMAx8U5x75sALuP/uOj9zyscE1z/22G4%2b%2b%2bK6zfYRBCWEUIubANRpHrsurXUL%2bv%2bopXTZ/liW47pI6IkmOrGB3XMWZSoxmEGBzWkK1VMJ6p4Rf%2b7XP/%2bKt31z%2b9Ze/8JFfFsD9qS/69RO33vr833rJsy9/9p33JOj3elhnGWzyKiN6Y7SyoHJhNTFVgHrUhS2Ug0nmaChz4ZNzI7C333tJW/YnsCf4INglGGZ7EuBcCGg/X6e1EJu/n0TAKXPYiJTzTi%2bGi/FRx5j0HM4TLQfGBpbUOpmjU%2bcxsTxfrjUsBYgUmMmWuwD0T/HIEuQvgT8%2bsCrmyDTl/V6czxJ2/fv3zyefO1y0ADYPDcp8gtKK1jwvKDv4DazyDpsH2NrE7tvOZN5qtk3HqQp12mXQmFpuK%2b1XTjrA5T7QCFNJ0FKe8Gxe8XzSdxcz3MP7ZNn6NsvW51N5kT/B47Qf2HssibFo64ifR6E5GQTzZLmq91LUV5iXkdO7rB8tom16Mnkcj%2bH1uPGa9pySz%2bGMAZt/LJpgfYV0Mc3ZWJGALffi9bWlQpDnev3nmDvNczO8F8bSkiV0rrE0XwDVeuxqC4Oe90iKJOk7WAXTFiIlmeq5y97uPrhI%2b4Bd5hSCyxolM725inNW6OasqIt%2bsoa2%2b1sAvpOSmFNVJneZ6XsVwOCNL7lPR%2bUjOE9GCf74cxlOxQGuvrKMSyvKnR3tpBiUMuxOQnQnCSbdOVrVQCpps7bT6UGkXHZ61Kk%2btjvC2VlZfmeVU4LMsDTHzl6Go0e0DXd3NeH3yEaIzZ0Ux9ZDbO2lONYJsb2X4ui6FgDi3vL5mibta5/URqMTpnu0JrIf8STDNZdnmLH6Y5Lh8g0F8H/9/6bYJQM0TvH655bwL5%2bgLkkWbWL7Eq1IfqVQ8pT/7m95G5mUpBXFobHupYxJ0zo6BTny4pEX5Z4hElap/VLA%2b8FTlUfz0F7l8%2bO1kqkqZ0lxKLdNxkqrsU347K4KrH3Oz8iXr6Rj8dofFhxZpEDphqrhLlKRAU3LFWhV2k698gTu1PYPswyDWlUqp0q0u1FBuDuTSrgEgwTu81mKXn%2bO%2bUYTM0o4TpXjfmaUINlSlZc4yNDbjNFuAF8cVlHOUvT2gBufFeHRR0pSOTWshGAgYc9x20VGkdIuLMbEyJIHehcKMVGSk6B9W/u4/DsK7JzRY6S/uj7CvkjuPDeCaOtXNl/Y/ECgzT7fcdfnORnd4vfW/gTelL61Y/iTdSmsPkWcugiCpsAIeBdJS3fOXkwJWl0DCPTTWBNUWUn2sZdAVGB4juMc287rL0wFL%2b5o9yIsIufNp4Rkj3Qal9A6oIZ7GehxzhjRkghx5bEAP/6rH73x9bde3NzIw/bN8wylh%2bbrN7ztI7c8%2bslPeWV5N73hLoqLzidoOGuRd8CHmcT6SGqhn5ucmt%2bpAPcU5bCJK46wIl0dZydlnI1m4LSzNaHnpQDu7/3tv/yh2eYdb/3QOy%2bu5fRAWu7ZL//giU/%2bzd/cdPrT/%2b4Dn72XoCVGKemLwg6ToVisIUlc%2bJNFl6Tggk7%2bvhSTTSui9%2bxAjPHVbeKlRCM969wMzEgg4iL3nFXeePlsSeVlub1ajVBAvanYiOdiQgDuEp6y%2bQKYYhItt94oQceBM/UEBGg7A4B/yTmMlkN%2bvZdga8m2fTEQaBgYKlKgxY1gTDaHWHwvqk5Aq6UufUBV8Iu1K%2beebucFPx%2bVwj/XKj/YMg3FjBoDPAvDx4U3e6zwiEwMI%2bql26bheI2o5P3EFWVhtISb5jk4I6zOJa0kkxzfQ/59I0JvqJ/xHRkA5/mteqzfBww0Sh6EM%2b7se4JnPrdd37CEAnntwLlRyLwMNwZydRaha9G4Xbw/S7g2IM7j7JkX8zl0AeL%2bbCn2LzOM%2bTzsd6Sykv7FffgsLU%2bNaeQM0Z5EDWjcqPpJThNzYL4YioX1ZkZWbghZX7QumdOANKJlxnrRtnOhylmCuF1D7r%2bmtDmOvd5oLjlAmkyuz8Fj%2bHxSLIne2rI6DOgAYFJqxwA4o3309lJycjRHo72OUtJFf64edsb7jCrHiIlvRvDzbiKpbXkiaiCWvvZJ/tZk5plrI/Hcki9dD0WtoxpkePNHU9yTBnjGo8oICIq3YjBP89NnM8z6KdboWZuUxHt5ZhShUg5Q2R1iK2ZJ87kU5tvtp5KgR68pb1C87t1aDnItPcgMlhNrU5zq1nCiPXV5EBlO7dVx2dpItOdZtIrfX742US36YI7TvZoAEoKRS5tj4Tqv1wPsdGq4LE0xP1rCLA5wrE1qJytMpvjEncA/fWiOX/7xEC%2b7iWOngng6w87QObTcfCJjoMkIpmtJygYv0WQI8K0EvXLjA7Saqgwvhquj1ugZSFLyZMr8wXoRfrfETwPrBsDt1EZLsb%2blSivHr3Dild/OSun9OMo/z3nvxqV3/PoLuV0/ITX3B/GaBOb7GLjk8lOxxuYbjhVZi6sVBL2ZAmNHlSEgTKYZ5vEcg3pd9MfjSYL5nGt9gtP3a2GkSZqJ4TDcmuDUpIoqOfFd4BFfAdx0fUWAe1QJBaia95r36wqqS59cZx0Beq%2bnCroJ5gV8E8y63B3SWfi9uWIEuNNAJV3fFUnL1x%2b3%2bFhCvfQSl9hqptQCSDaeu4cxeK6%2bUyPjeaxehYx1J/JgXndb60zAQpRt3LlEvSkFWD%2bXwP0RnQRxFGkkS6RkgWP0tnO%2bcMfwx9kpcMIZJ/yO%2b8r6bJOSq4PC99QdJZhynSRwP17Ct776A9%2b4uxve/qE3f/1F87pfZPh1IV39wvd93W/edsv1Nz31lVF3esPpnT3p5PSQ1aIUhNsCJu2lcwKJ1RO/csuAmVRNreOq9QRZUMfmpILT0UxfKkNrmYrudpoB3vXbt/3Q%2bMx9b/3QOy%2b%2bmP6FtsRPve3jT%2bj1xy97/a03v%2br2z1Arqi9JLOVyqEmp5RBJoh53VkuNo7YoxhhoF09XVGizK%2biiu4gg3UsyJU2F1JbSYlW8C73fw%2bwvg48cR48uw8WCoEkTVM%2bl0iiwV06kgB8CeMoFWpiVL19k6Byo47nIr8/7BMPHTEFWUMnr%2b%2bDPp%2bbwGjmYzwhqNMGWF%2bBxBLGFV1knMQN4pohj7SCAv%2baqTTLJ1msgo3l0SP8wBOJAFj3fPg2EE5NNjs4WyM9kC9uyxr6BPu5PrzEVLrhJ7kA2l2qM9Gb7DnwflIt6kPNo6X0rsBXwR21x9530J9eutqDbzQntyYFQP4lZziXn1wcT%2b8TZBvzc%2bkbeLxxQ13em7zi/lmdc6jkW/cKtRhnDiXphuJkU6bJBWvQxXW3ME6TRIJ1vVhmxy9/zHiTh2t2GPy35BhC/lvZmxIDqS9KPaIXzHWmf0GPV8GOkozdOBTxrBCEoVJzYLk01lLiRMmTGkOaLLHrUzZjo1Evoxm2slZnH4nPYm18AACAASURBVN6yW7D1GK3Yac8uykASFWOEq4R%2b2hZq3YDa7FIjgEmSlH5k/%2bC4yaGN3Jdx553/NAcycWUd4cSrgFo9gnC6hZRUGGSIpmeRVC9BJ9hENzm6BI9c3da5evulj1dLWGsEuLNXwufuneHj0wCPaVJ2L8B2CuxNMvQoqD7JQDn0s4NIwP/emakYFmE50ErUUQHOw4j1P4q6CL3T7LsavTlyWYjtkyk2LlV4s3sqwdplEXZOzbFxKVVt9M4kxD/fRidgOValJ9o975xKcOk1EXZPJmJ4dC6NpIBOGmeIR3NccVOIcX%2bOK04EmEwVvHOe3x3O8Zl7M3zy/Sn%2bww9GeMmjK7j2iIIfzl3CR14VUFkxWRPsiBEkVLIAndoQe6OmgHd/o/decmhIu/HG7opTPqCP1LOdiKe6RK31slJjuFFaUTznLmnVn%2bN53HighZ34fU6fcUbdVLzjxRxhwgkXepN%2bki17AO%2bH9yF8emcU6MgtpCP5ACMmk06n8jnpMq14hrGMr0AMQUp/EhDG0wypA%2b617R526s1cXebkSVVA4RoxjDNMdqY4PatibzRBJyij%2bdgMT7q2iiMpjcwMVTpGugnWOpFoj7c77I/63owiks9RLmrFfnDEAXnSo9h9%2bDOnyVgTWnTGGR7drs4/vJbMxe5zX4bWDrVrWn5I1xmUV16qHnbh2jPasJT87yfbcl00r7xc2DPeO2Vga6wykNUWsFGDOH9NWYYPT46/TO9MYo5V7WdYVpxA%2bs2R2iKv3u8npMzR%2bM9GMcZxiL24hFf%2b%2bw//0OT06bd%2b5CIWYnrYAPdnf/sfnLjlf/uGVw3Dyguqg9ENm92B0kLKbUTzng7IWKFUQY/Z3%2bPOCSZO6S2p46qNBEFWwzSknNRMquRVUcK9YSZelXKzhDe86q0ve/yj6%2b9/35v/%2bYH7e//8My/4WPrYN/7AU3HDF07GotPejgaIUy3%2bQW87E1NpWTaq6k2nh2o4YenvdfV%2bTXQCYXidoWd6vtjbrWyxJCtRQovZ85NzE3Oss67yEOffedZovkKtmA0fqASZD%2bwtBC6Li1EgnJdcE2AV3JsHlPuZl9agkBWz8f82L7F5aSXB1iXVFp5l5%2bGr0TOrAJ7XUpSlizhBkQA/9/ziEayRfqRymYNJ4alkwi8BsMjW1QIB2OaJlcqbS/r2BENWAMtcc5zA5fLumr4sJxduoSBRQtKBZCJXGiDWdssTqWaLFdQlAeoOxOdFgDzQbR7GnHKSA349cy6FSPUN1yZ5hGUFGPapVP5%2bfkhV23Q/A6%2bIBFhkYBlw81iC%2beVtlVF5oYs69zcDwjeKDPqo8aP36Pdh/i4RA7ej7WP90e%2bDfqRADFZnzNBIEfAvA96LMoj%2bviogqGqTGWV6MfahwThbMEwMpK/KVdHv1HvOtmWtBg3KZMjyQm46JubVdZRELcagjM7b1F3vJevohPYdk1XXpRpqWladdvLZ%2b9lRkfHjf5yn2D%2bi6Wkk5UvkjFFyCkl0mcAQPk29WkKnxkTUEH917wx3DtSzeO06OcIs8DLHbJRikpTQTSL0t6cy5liTYndUR7UKVCrA7qlM6DCk2pRYwKkUYjo7g%2b3dS3D1lSHGk5No1C6Vaw5HZ1CrX4bJ%2bBRqtRNuPCrimAzPoFq5jCm/LkjgBhhDMHNH/yhlCAPmbQH33JfiuqtC8bSS405pwM4xShYCY5aXf1yIy44oX/coPe%2bkKozn%2bOw9Ge4eAs%2b6LsP3PSLE19ygCauM5oif6xAIwGoHGCgfjJxpwTXCAXrzuotDwHngF2gWD2DASEEnpwKTH%2b5TnzKlm/i0Fz7UWmWK3sxlMlIuUuSJ9QyUmbTInTyPx2vn90ZzOUg86byPQp6%2bM9KNMmM0GhnPotluXhfX75kAK35GDW1KAOeYSkIyOZXrugH3fr2O%2bnYP280W0iQTygyBexKlyKZlTOYOuKdVDEdTTEbAI65p4SuePJdqoeGERSoVhG5fEmXHziYMOAmNhCB7bU2rL/Pn3p7%2blARQB%2bx9DzbBNL/PwfmaRrqlHyzVNpEkZ0dxIXbrjYCNtgJxf%2bN3VMghHY39%2bHQIHGefd6B9nbKl7n3KPMNZwU/md9fZcwYDz83r8h5b7UhwEY3f/4%2b8NwGzLCurRNeZ7xQRN%2baMjJyLqoIqyoGhSgXaoQTBdmj0ez71CTxncURF1Nb2ofKe3dJP28ZutZvWVhvBAdqppQWcEAQpSpmpKSvnzJjjRtzxzP3Wv/e%2bd8fNiJyqEOt5vi8zIu4989l7n/Wvvf71eyVw%2bzIQpJmAde4zqvoSFAjRkmbYrfiYiDMF3DWgNwGMzEBY73P%2bKvJSDrP9FHHqYeC6ePWvXPjVlzwj%2bflXftWTJ7O%2bgW573Wb6D7ICrQ%2b/%2bZue9er5z7vjFfGHe/MbzPIuGY654hLDJFSZfhm9B655XmxEScrp0CoOT5XopQESr4JeL5Vo7CIdWjTj/uLPD/AVL/lvrzg04/3pp5txZwDzhV%2b88NKXfv59vxTnqTQyAvYpt4M4d1AJVUEB4yhDxp0yGaMnJXiXqeyB1vQyKTdsYsJtS2/j5wbQ2AlM9s3co48VWyz6Pe%2blb9SUGkuuU/OnAii1ntLz9nrqd35vtr0Vb3Yb0CngYJhHldg6BEG6pZuXlW1baWwszVS/uX7DDigQpAChYU5tZtmAKSUXUAU3%2bD3ZSWE2DasvkooRKy3PxmJQOQxIMR0daMggr5lwk6QlbM1ABwZ62KDenzMPIunQ/vh2Eiaft9Jua/DKipvCnLoSlJniTAro6YInRuPN87UCt4NAs4Jn6j8BoRoA2/pTe/ZEgKRmgW2wLC9TSSbdC6DFLtRiyK8Hpk0bvZmg0AbUn6pBzdw/O6AZXqslfbEBlXn2w3MagvLRfHfjgORueZkcMCbu5UtHk5OCtfXU740Au2vdKxUMcVZMLUqH3xqyynSEYZVTDjo81q7k4bTk5b%2bbNxGk26hQPiQOKhmyYBZBuokymoWXrmE3m8Okuy6AneOK8Osyhc1sOBbBURdCjfpEBPzex3N8pK8qWt4254lzR6ubYzAopCT6buqjvxXLOFitAuu9ihTs66znwn5SZpBkK9jYmMPxIz4uXiYCCDA/u47NrVkNKIRvlju/fMjDpUsUFgPz02tY357Xd8LB7PQG1tdmsbxMwL%2bKamURFy/mmJvflOuPwgXQJ//KWi4ARvbKKf0cOLLsIO4DtXkPg06BUzMZVoIIS3OQapAim3EpZyjwJ7%2bX4e7nuPjiEzm%2b9/kRfK9QCasDinFuDLwToBOcUzYzqsTK8Z3SDE1PaotKXuBu%2b0nwhR9voGPtWGaUaypoY4My3u4G1FCvLgWPWNyJFowNw4Cz8JGqS7EXuPNaVCDwhIA7b4d2UTOJqTx1SmN4HjLqW1GTPAOO69UQjThBnxTwVjJktDtjwJ1SmcpmG1v1mpB0RZLh0iUg9ViRaQy4xynSuMC0X%2bKeFzXAkDJMSlRYDdVMNFAaPO%2bX0yuZU5vy0d7NpO3wnAhSiTEIfG08QGBPuQrPXZhz/fq3gzwCegJ7Lvy9o5l93nfKy7bbGrgb33XelkIlej9C5xd9m9Z8Bdz5ZiK2oYTNAHcm5LKr0Z7RyHjkNWSNpTwnA8ZpMcx7xv3wdrEQk1fkKDM18831AoJ30cJAEsbrSYZe6A%2bdd3hF8wFwJQbmI2A1BhYoo%2bEOWNCJ66cl4thBGfl41X88%2b6vPObr78z/2JDoSPoWA%2b39e/OZv/YLXnzp028uubO1iu92HJ8Ilrdm7QcA%2bfIEQuCcFphoVHJrIEecRUq%2bKbJBgNSiw3VeFNXzXhXfKx%2bO/9vYvf%2bj05Qc%2b3Rr3xXvecM%2b3vfLZL//2r/mcV69c3oHv5QgDatZKhKHSthO0SwRaltIQRSeqe504MGRt5apB4Ez9LQdA0RwrOchB%2bnW509rujOXUDSAfEJBPBMOKllyNjjb9fiGD5lBTYKY0BTTubXoGwNvgfb8qleMg4SCWVECCHvh5pHEwaIAfQTIBgw2O9Dt/X3mO2c4wjor1t2Ua6moNgFdsu1WYSr8ojTSH52m02ALUTQl7sqQicVDsNCuTGqkEawvYzLjSlBiGVR2rpnXZvD6RhWi5hBS6qnLKUj3nHgM1VjEd5hNQ3qAZWnPfrHtk7v%2b4rGk/8Cb34QAW%2b1pg74kCaOVAoIJGBoV28LAfkN8TiGrQer38gSEgtuLVmwkSrnX91/vOyHBs%2bdC%2b938f%2bdn19i0AQ2aO2Daunn243vbSs7Vw1fRlKXCj26jhqFpFE02fVpClAHTOAhI8syGn4Swm3JaSPfRLVAncyxK76SQaVQXwDfEw1LQXnFVU%2bSYyslATrjW5nNmi/OvhKyVe/7EcYTfH8cMe5pMCFzJHAPt27KPR66Ln%2bji9XpUxs71awPNz%2bEEhbPuVFVW%2blLlEUnjGoezOhaohqxIW1G9q4GF7UPB9NNbptFmZh98z82LkXBIpmX%2biupU/9wRy1DdTIRmXOHzIRX9AVzAPi7c7wr4vknnXdpKHZxz8/aMFPvFgATpf/OL3e/iGu0t5P/QzbrvX5/2g52u3bQXeHUwEPZRhQxj2Sb%2bD3VQQvOxCnGvG5DJ73Weu15L097RvNgDccpsZbj2WfKwqlSrU5qUD5HSN0Tdasd8jRl4sG5kXZ%2bVRDcH1DcqI5F3HmQFNRNzgVaEXheLZrnTUDnqUKNY5ZmkJk8PZfogne9hOhHHn8zZSGVo60h5SPNmTDBcuADmRaGaA%2bwBX8iqq7RbW/Rr8gYvP/fIKFtxC2sbhoJT341ZH5b2xoTLB2LDflKhw3JxmfoO2iNTdSi5R8le0v/p2H5hlEWOzWEy0AfRclwy7FG2ygkVtGT8kfZyjfhleyByC9UXtFLOhGXe6Jpk2pXE1ZhrAZkeBeX5HuZBhBcjMb2m3F14fxwO2JV4P%2bw/l0OwrM36OjdSTwGDGyZDa4N1ck2VhKcfW10gpDR3dqIGvZKpCcxJnaMcF0pRqDR%2b/8Mfb76u0Pvltr33l8540Y5OnDHA/8uxfuedVP/AF3768sPxd3ThHb9BBVJlAlo5VSDW0n4x2%2b3Qj%2bV5l%2bDNbe6kZYG6mit5ujo0swmaQYmfggCQxQbvruqje4%2bPxX3/vl3/47x/6tAP3n/vtD33HzuxnfM93Pwd3XbrUQg/K0jFNHYSR0rcrR5lSCiy5gx0B5e10QkqBs9sYpsW8HxiRSkLLVU4xeyEUAREBu2HNpSOLXo0FK0ZJNioQUEWYTDEL8yRYwY68GF/I9suI58tAQAYOy4vdBAifalDEAIDT4jYrbED99QZjG0gNpQzmZWBrrccZpCGiHGlkh9pokwys9c0yWBo9%2bXXyDkazCUoiZKZeDSijFlmq24qt5qh4yHhQYl%2b3AeE26z1%2bX2zN7L4A2UqI47aG6b8KOO9zw7m/4XpjTjzjWl3O5rBtsU3zrolelHIJOtGMu7PoY3GbiYkA3XaKCmePxp6Vaat2ECAAUvcHM7N0UDsdnzEwlzjqU%2bqYN1LoRvalg6mD2uaNrHPQtgfNtF2rHwwdR5wSg26p9KEcRAm48ymEaUvuv3G2MvuKtSMPn21SnUbEoktFgTiaRRBvI42m1c9wGhPuFtpZE1G6iTiYRdNfRzujWR1HFM4satmZBlHVwEUlIvmiklG/%2bm25yCDvZDGYGeqlczzW8tDbTJFmGVpJDfE2rUFpo7sqMsl6YwGX11Kpqup7fB8oDfnjF2LcfiLC6fOxaNzpDKIWpR8fX4pS2Q/zqzuOR3j0XIzbj0d47Fws%2b2O7uf1ohEfOx/L9I%2bcSeF45/PzRCzFuOxrhsfMxTh2LkKcKtBkAvzjnYtAG/Akf87c7mE0ypNOeMO/Mf2r1CzxyqcQDbynwrn/n47OOO4h8F2stcS64IcmMYd15bQLeLclMvablM2Nspxq31NIx7jP7RMVmLDiwjZmdHIBYJPHYVI%2bmhKeu9fCa5abe3M%2bUHeTeRb3jOFZI0ScZmK7V0p/4dwJcNVPUqUZoxLFKQq3Qvz2BO0vGnZ%2bpZGPKWo1UJktLtKsV1Khxr9cVe6yBe%2bEVcDJfS2UGuFJW0c9y9B%2bLMXmkgvvuc8Qak2q8flZihiz2Mb/0zmcsXSCAle1wpg5szvulez5zWP1zfdYvZ9YywffbC%2br3gkOrltosbmbOVt%2b6bRzHjvqldy4THSQBNAH1hq%2bSuO1HOKclLhqWiRxl3QcOay08f%2bfMvXn8/Hi%2bAFY9YE6CU0VOmj5HMG7GapNsakg5AvfJqpLDUCpDN5nFJjBbhZKg6doiLMwkM/l69pznm1iSLZ7LlAe0A/pmjtoDP6/lGZKKj6STIE5cIdu%2b5R3O5am/f%2be3X1ofPPBnb/zKJyVB9SkF3F/7U1/0Q/Vw6WXdOJXpQBZH4lMqUi3Y5p3jIBTWdNGlfXogI/GwKlNZnV4HhyZDzM9UpLz2dlrBNqulxSoac30XE10PRcXDz/3L133GM5//eWt/%2bAtPXmbwzQ4B933dHyz%2bzPff823Hjpz4KVruSXJivoNKFEgQQlaIrHvJaqljA52ZwpJxiWyU%2bCm3kEXUjxLQjwZec16jgisKWLIDkRUj%2b8Xpay5xrAC4DcIrFTUVLXZbWm/OdSU4MHZZTCbSMhB1PNUUuW9J6NHAnsw9O97NAvdrMfE3e9/lRXUd5vhaHvUHHY/aXAX0g6sSL8eDBjtJ0l7/oH2PrDRH%2bzbrmu/4943sy2x3EBM%2bdEWwgKx5Xdsg0IBc8536W82%2b2JIpGwyPy6kkkLOAtWl3o32N2hJnfEzgaF7MPB8CSP5UM0Kjdmyu026XbIdmWx7LBJ6jayF4VwGqSDWsxCzVnrUb0Bgzb/qT2Zbr2uDfBhA32/Zvtn1fq23fyKyXuhZg0C%2bQRmTPd9HrUWqigDt16/xOJey56DPzU/f4tNJEJdlGHE2jaG%2bjVuFs/zRCAnizlgxNpYD4MF7Xunky8/ParNlBlKygHx4Sa1iVzMvjelic9cDkw7d%2bPMcvfdTDV96hMtd2Uhe7VwY433EwM0HGvYbBBp8jcHktg%2b%2bz4infASUqgYMzl1jsz5RmV0niRoJkPKbH77t5ucpUfQGcOh7i0bPJcFvpT9Tx6oRAuwCM/bk9C2lmB9OswMmjkTB/WZGDjsi9HrB4ZwvYmcfMHawKy4qbCjnzVRlVS/zRHxTIb3PxJy9x8PQlB1GY4dymiwk6MrDG6zUam0gRLccZ/k4rSOMBb6wlCep5zC5dhAyTq99Hsj41ymLlpT4UXfDw82u03mtMxZn32%2bQefbveF1n7upLNSECvQb36mYo8hostkTGBgGzzJAN5l22T/Z32j6zYI7OyKiDkvWPegvAt1LqTLNPAne9a6rOLnFr2AtvVmmjcUwZp6wUupg68zEMsGncC9xqqnR1cWQmRTbt4/heGmK%2b5aLgEqqU4y4iyTPMUlKNkx/zSOZ%2bpYVV7swsw1oXD1rX%2bfp6Ms2bANTeE9RA4lChN%2bkKmADj3w96%2bSGkK6wwEbO%2bqZ9hsO38nICdw32SehzQMR/qGv5EgW4jgrcVIFyN4qzHyxQjOSoxkPsSsCNTVsbh/yt%2b48LgmMODfq5xtiUsszvqCH6ng4yTFHUeU04wAd5OIy9kGhwWu9KKv1bRaHpKSGiOnHbZm9jUPGLQTqSDmuC7e2HYQvPtvX/lrv/HQex961zd%2b9GbH5/3Wf0oB95/4qS/6oYlw6WWb3VSi0TIf2EIZeVSOFGAqUXIk2y9t3mLcE9SwUEkEuFMnuCXAPcMOO4r49CqpTJHml9/w47/w4osP/siTctNv9cFNPeMXX9j6xHe9fKdbfsPpi0xK5XRgGxXqLnMbuPOl1hQnmaupFNULTcccJ4dMNUMD5MlkmenvIVjRTii8P/THHR/YjPaQDIZiPVUWPRcDggyIJzA3C4MCvuwNWCLoN8BdxhEtaflUA5kbeT7jYOdWWEqyBSYx0BB2%2bwUAwhhonb3IZ27QjtPIX/brBvzOdlW53jVfy4FixDy7GIhdpFoMSDYA2UinbJAuL0wLQPPZj8A2y4YrjSq1ytIuxFmFLDqlWv4wMDQzPLWqmnbmTzZMtiG2ME6Lc19SHIX71DM/RhfJtizr8mW1DyNo2q25Np6TOjcVeLDtmrbK4w1Yml5LxvjT3JfhOnuCnNE9IPiXxcoJkfHsGsHrddnK6zzcg/DQfjNs%2b%2b2KbVeeR93FgKBcI1q5FAEpJdLKNKKECac0OVeM47C4jZbSUPJBVtdYEw7cJqajHZGCiAdTWYKf1euOIiakY5iHxQc3or/4dZ3lJcsSa30HP/bXGYLSw6mZQtjx9lqMS10HPbKS64plL5wV7OwuIqqUoIeEuHB5wLlLsVgDs%2bASlyGO07%2bY8uz2vbHHREnS5D9dDn4PDrT4ErvZmaCA2xBU3E7Qfy4RK0tepYD5opBCe/z95HIoRenmp334DQe1oo9kripSAFrdzU852O6UuLRZ4n3vLfBDX5bi3mMVfPFdJVptV955E%2b4uCp8lM69fdZbXuh%2bQt3XwlF4o%2b0j1mKiFN8GYm3SRhXVJMDbL9cb1/SQp4hhDHbsG46btCYAfhCPmvebDz/pos7pqqKqsmjFtvyJLnyrgzufa0TIZMUrgLMSkg25FJaKKoTrL9s6GcLdi0LWoQyIxYGBcyjtfKqHHObarVQXcWfBnvcRlVhQlcIdKTiXjXuntSt9cvxLhGS/2cWQpRK2kXEjty8zwSXfSXcqMP2yP/GyObZfdVkD1qP0L7neV/pwg3VQJ5jbmM61a1O8sB/56jAvVCEf7CfL5EN56jJJC8Y0Eg7lQvpe/6ey3lcrYUSxEUlmWHZL7FjJe14ZIZiPMyFQBsEUzETrx8P7pYCSZi%2bCuxWofV2I0ZkJEfqmIzrqPIIMkdVMVyH40pYNOZuWw7xmbTHbTWS/DRq6uciipqflItM0oh6NQV%2bcV4F64cD0X/6Pp4He//90/fOZDZ97%2b0Lv/iQH3w5/1iy98z4OvfNnf/nn7ZVtdjl69YdVU1fE1i6Mrp5ZpT4u39nnVyHNmZn2JQ00fh2aqWOtXRDO2FmaYcBysDoDFiovdXAH3X/nxN7748Qe/59MK3F/ywx97zVf/87tedO/h7P5BZxdlMImJoIMkc8T1IE1LVOgm40/BSVqi%2baQW1F6o3dwtaA9JDakC5XurGaq3C%2b3bbH2wYdttNpJgZD9AV6kQUCl2Yy%2bIv/pzYXh0RE/wo4CVAvz8adhRfsdVbWbzOnhk369vFuQY5vN6LxUe7HqsvHJtGemGb5SlN7IHM8d4Ld24fQzjunOjWmWbOTfPxJ5JMay2zW7bAFrlM6gAS56hlkuZ4G3Pd1KshEDaKorCCqYaWEs4x8FXy7hGgZ8B4HpqWzMh9Gq2gflw6vsAtsy0S3sGiABUwIGl7a4ywNGA33zObe1%2bwJwDSo64mHswHjDYzPUI9CuWXthq3U/Nfqmdtmer7Jmn8el8Jn0TNJs2Os6S2%2bvvJ/kZISejz1bgmn/1BwS1yr7TJJGrwJr3OwXrPOwWkwh1guneTqdqmyZhE1GyLZRbt6um/wXQTzRFGiPFmJImmlELqT%2bNvLMNf3IafrotYziLmXhujoHTRL3qIGuvwZtYQL6zBndSVUkdTqVr9Euma7bhYG0twYd2XHzXbzr48n/mYqFRorWeYKXvYlBEiDdSVGouLq7kCENlp3vxSizPhOQNBzieLxPmRH1pgXWjXr94JsWRk8GwAA3vwcWzKY6cCnDx8RRHTgRDJns/kG8z7caNyb6PBFi8QAnumfxGIH8sxKPnE9x2NMRDZwY4uRxhkBaSLLrQdKQ05rFGjEo9RNZUuU8LUw52BiX%2b6k9yuM/0cO9ijv/yJSpZj3IMFTPeSHbHtUfeYTvUfVhJJ0c5R1K9ta4ilhti2g843L6A24pCbVZSzsk8u6syrG7lTXLz28jhdWAuZAdtIAcJOtUQTkslo6oBVLVmMtTUuAftRBKjWaOFUplup0CZ5mhVmZzKJMgMyWqBS6kDP/eQljmS7QSXyxqi7g4GSYnNlQB33TeBpWeUoIvnIC3F2nEYolnK4mFf0r8IG67BObsBq/tKP9BBJL%2bjdMWcf%2b4CC5TRuOxDCqwX8xEu9YGlqg7etGRmTds9HqoCzkaqwTxBfQBvK8PleoCj3RgXJiOEWynm2I7I9s8FcNYIr0lqlMhnQjm%2bv0UpBrBC/KbrOJjbShDOPrK8GCJOS5HKzNR8HJod5YRIgK17wbITY6caod6L0SbAGj4fdQ5NPxOZjnmvGWcb6tr7OwmczIUbuPibaTf/6H9638//2hs/8o4zH/yOd958y7l6i6cM4/6tP/03X/aN3/JZX3Ph0fBlq2vrWls9SvxxgzqytGvJ00wzMh5GehTR94A2XHFZw%2b2zOaIoxGa/gmyQYzXMUHMcKXu7VHGRTkW4/PH%2bYw%2b%2b9U3P/7M//PQWX3rLu1ffde%2bz5k91VrKT/c4uimASk24HXuSI1pHylSLTzgqm9xlqXa5bT03qn7nYrI0cHrjqDhPFAsPUGwmDJ4wiAYFhfxXbOapmdiuN0eyL2xrAw9/tohoGvOvusUdSIVdk20DtcxJXgRwWeqmNQA432Q9wDwMSzXyObyOtaUz%2bYA5vps5vReJzK/dxv22uFj6N1jLShvF8BeX0o2Y8uIg1miV14jMagvIxBlueoakYqA8loLxUOnp7MU1y/Bz3yq1GAFox93vbm/nMBtlP1r3jOY8D%2bPF9ixxMzyLZ7eBGZl4E%2bHN63gKcBqjb92Sc5b%2bard%2bbeDt8r2g2X5LH%2bRbylKMTNfwMbkx/E391S6NPnXIrm5KkURW4q%2bfPWQ7DqFMCY15UWtxm0ij04bWGpCiRRAqYy%2bI56Hcd1BpaVtNTzhZcttMpTIcttJImKvlei0jZ1C0x8Kb0VIge2IZaQCWHardT8Yk3iWO%2b72JxysG//xMPf5FmOPcQ8ML7xPLrqAAAIABJREFUgK3NDJdaIVLmNG1kIi8M6MUeunA8ByTpybA//WQFj1%2bkzlzdP3Z1at4JyI%2bdCnHpTCofHjPg/FSA849r9xx%2bfkKDdv358vFAbVMCS7JNsgfYC9upEe9%2bQN7CnXuSBeUGipVdKbM8x48E6HRKzE1S1%2bWJ3n2mVyKfVuD90LSD3bjAO36/kDL2v/Fq4Ks/u4J2V/m7233wifQnm%2biQ3Bmy7TbIGZvqHcYMVh7M9UiWcQb%2bU8WSP5H7YLY1THtjoMqVsu/0ug4aE5TIAfWGqmI70rfrJE7a5VJKpFn39k6JbiNCeXkHcXNCAfd%2bBrpf9leA0ivx0c0IeauNElX0ixzFaopz6wXu/pIAn3myinrOBNUSLMIr/YUstQbXF7vA8V6MVLPefGjCchsJoJ79JXDnuryOQ6xYqRNVpfjSZoaMwLsArtDiUpWIQXUjxeThQPJRvO0UblngSiPCxGaM3mwon0fbKXqzAWrMO1kIUdtM1EyA/sduz3MezIao8Dt9L1VQpD4PNhPM11k0zXrn0X0PBNsF6g3NurMLBz4Wp6SriCWkeTZk3yUsKADq/Nl2a4MYvWoErMfI5yNUe7Gcix3oRKZar%2beg1y4RuCmcuWr5vT979tci5A//%2bo887WefjPb0lAHu3/jav/6yH/6e573q0Yfy%2b8%2bsduB7tLtSSQtZ0oMfErj34OkqQ/ICpN5dS2eES%2bL3YR05izcUBO5V3D5XoBKG2BpU8HCSIPJK%2bNRW0QN9KsTRO1y85x2t933gTW996acTuNNN5s2/%2bY1/cMeh2snVnRR%2b2kbHaWLK3ZGXzh43GU2XKo26YtZ5/UwLbeVTaHotsYCkLRuXVt5Un2lrNr7AlNyATOJIknAtucQTbYx2Qpd0EkoRxlhM/k2HCS5kSrmMA2r5VotGBbNYCbWjc9wrPTAkjZEEqfVGQctQvmBdpJ2YyK5rs9D8nct4Eq%2b9jh1wXO8FdaP3lvsZt9kcDx7sdcx9NDMr5qXNKVmTn2DyFziLQtA3ns9gzk1mWbSMhyCbLgvD2HFslLkVFwYjabmRe2FcgeyXpp1wZq7zVuxHb%2bT4N7qODW4I0geDvQGOCk4U1csgefS3KjjDZVyPzxkqIzXj%2bGfu2/jsmB2Ay0xF1RXwN3poKs9EJEec3i8nEWhWnc/aBEwmMGbV0phAPWsJq14nraeLpGzHU5ip7KDXZxIgXTxKDIImKqkG6YL1le6X//X9aVQy9d3Ab8pbs56vY%2bDNoJKuo%2b/NCWPLMuhqKdFoELAy78cR273lGRePbJT49t/tYqNdxz1LA8xPe/jYJz20djiOKP1wyYRTz8HpSyleEMX4QBEh0sw6ZQCe72LqQoLByQgr5wjaAwHvR28LcOG0AupHn6ZAOXv98ZMBLjymP7fWWda/Hz2lvl86GeAKmXoL8C/rbZdPKLcToqU9M30WGT7Oi3P8P3U0wMcejXFs2UenVaI56cKrOpi5w8NinCOf8UQ2wzLsf/dwjjaAh1aAM99WojbhYqvNQFDtWewnn0ABVNvfXTTvusKq3TdY1IlSGoIxcTTRCazUwMv6N6J7t3b4jxm48zSNtp0JqXSUMcWWKJNhUirzK6hv53ua49U2HWV2VU4Evfxj5onkDtqNCLWtLraiqsW4l%2biHDlrbLnJXMe5XCgL3DM56JsD9WXf7WLw7lBkmJlem9IBXAmN5Z/KddKQBXNIa%2b8pGjMFsJG1wuQphzPmMyJpz8bdSZHMq2dfbSLHaCFSFUgfCjvenA1S2U8xHpah/%2brMR/M0UOT0fxY0JCCjrmQ3RuzBA40gF4XYq8hvRq/fzYWXWxtEqQi2n4U%2bb4GBgsNFR4%2bF8wxM23O4fbMe9mRDL3QSX2wVqiyGWvFJqHjCOetoRH72YNVMAbyfGahBhvqasIRv9GFt0/RhbJuvAVhdoatMiw9IL0HczGcs9X53L7rRf/pff3X7/e94/eOA9P3/4%2b67a2S188JQB7ne/5G0vf9tb/sXLH/l4fv9jF9YRRVWL8VTzNoHbRZIqVnArzzBDlOKruZk86%2bmkBQX80oK%2bvFUcbmaIwgq26xH6eYFwtZDEVD60fMbFM24P8LZ3tt73gd//ny/9dHm4f8W3vGsxbky84u0/99wf/NCj6ULW70rJ7bI6LTr2kPKYFIiYyJmXI%2bkLp5CiJpxkR%2bnUpYeNQtfdUtmwCWjWDBYLoyRt5eYw6e3qJuUhpnzgOq3lIGC/n8zEyGkE5B1Q9MawrPJq1iiwqr3P7WRWu90bQG0SGI2X/CjJceQdbwcL3IfZlr8L29grUJXKj%2boItpbbBvaSBMmy7x1aQ42kHybx0E5AlOReKdCh5xk12L4qADlA4jHex%2b1paWXDt/chjVsi2hMwo8RLpdW2EzGFLXeAeAxM3sIY86RsYoPFa%2b1QBSaqbLv9fMlmMYlOTdOPfo7bj9pSkhuRRz0pF3etnVhT/3Y/GDKjunCI2YV4VlszHJTOcRdMbLuqf1o4fdi/dOKumQFQgUMhoGHcJ3Y0c6PuqQH6ffqLV1VBGbYhBdZ1VrycqJLQjC8E6dVMM/T6S9Y/5b%2beN6PlyxyYeUXKj40JhqMKjCy248IpXRye8/Ef3w789AczHClyfNbdBc6eC9DuFri8ppj0k0ciEPovbnSxuTyBRy9muL82wN8mkTCEz%2bgkeKgZSdXKlbMpTj4twAWy5rqXHT8VCnNO/S%2b151y4v2MnQpw/y%2bQ0y0Nfu2RwmCX7foESmpMBKLNhoCnAXgP%2bpaMBLp1Vx1k6tg%2bI30fNwrbKPKe8KHBsKZLZoNlpB17dRz3vI1mqYYl1KGY90e2GQYmzl0u8789L/Pg3lHjVF1DOQ2taRTPSoKFJJlWnEdysgMb0HeP7LvlJrOqrq60SlNss/MgbXj94PcXwj6IPPsFObrd19kZh33uOJOkygVf6g%2b7QBO3b1Qiz/VgaTztVjDulMuzDAkpzSoxSxNMNZDGlMimS9UJr3H2Qo2Zy6mpZRdTbxU47xIXtAnccq%2bLOex2EVVc03XNBCW8zw2A2QEVY7wjVzQR96uspG9xM1GcbA/lZ4zpzESqbKeLZQN40/H0wE8i7Mb44wM5SVUDz9NoAteWKBAYE853LsQBzfzNRGnVK6GZDdC72cYgFqWZC7F7oY3HSw0ovx6GGj61Ojt35CmY2YrF5VQQkFQWq6jiDzInlKjqX%2bgh0NjcTbrnu5NEqWuf7mBPTAOOrz5o3QGMxQLVXIopK9BIy6r68G%2bg0Y85N7CPJ0NMO01IveK0YaTOCs62SirMpVrJSAc1UEkvOSTkVyX7qWSpJ2Bd6Pn7rnf3Htno77/6v3730zU%2bwOQ3HnydjP5/yfXzVj37kNT/zg8980SMP5/c/dnEDUVRRDRq7iNFEhDYGmS%2b%2bujJdox%2bsG9TUNAs179JllHVYpqumPm2WJfcCuEUhdmD9JEXkMlHBRTHj4LM/y8dbf%2bf8f3/ty0581af8Ig84wH1f8Z8Xv/irvvCXfvIbTr30w6dTpP2uJFjQQUZsICvUvinvdLZSAknaoKl3pMpElUIn2a749tY0a81BhMz60KbNa2l3iFIs8foyLa5u5kFTqDYY4D0nQOJLnIsBSbcqGRmXHQijorXRxtpPzQi4FuO9lyk3DLR9a%2blwQUaZL/xx1xKbrVRAhMy/SWpUmnsutkc92UyTbGs0%2bep%2bGS97s42SH9AmUwKQselibmGmJPcy5ybYGP00LP9QDnEV264AnPHRN1p0O3/AJIHaumw7efjJKETyqe4z43IlW6fP9ifFYaxF6cnVB5RqjD8Dgn6uI4l0wznQW1f%2b2rM4t9oPbvQeSkCo5UxkfIwWXzz7mUjOQlpWXGcHQyaQVmOG7vaj8g9X9X8zszVg%2bXAdCJnEUrLtZNmno90Ruy4SGFMltxQmvapZ9b4/Jb%2bLfMBvol600HObAtjNM6jlmxj4syg6q3Drxk1GvZDpndzrsNIwPd99qRZdC0v8H2/p4kOfrODEnIvZwx4unM6xsh6LpJC68cNLAebWuvhAWRWW7zN6Azw8WUGFN4DFNukqdp6JqSUeLV0Fzh3gs4MCH07V%2bCqf6YQ9ARN60sQOAI8%2bLcTZRxNV1Fg6uX6iBXD0VIgLBPl6ISN/7tEUwsyfTrF0TIP4Alg6oeovDKU0Yww8te%2bnjgT4xOkYR5ZY8AaYnnTgNXycmBpgvVrFkcUCSeyIjGi7l%2bOTF4BHdoC/%2bLoQt83mKD0H7R1V8IlEwC492hkEX0eSeFAbHSWwOpiMetiJa0Ofe6N717d1ONkjTXDM8vVG%2b8A/tvWGEpk4Vu1bWz4KiSBMe4xGw0GvW4Kic08XXtqqhpih44ynklNDX/m4E3hSvMLCRmUC9Jp1JP1UXGUuZSX8xJfk1P7WACuFSk7dbodwsgJp3cedzw9RHQDVpouZQBcmssdHQOQqBNUcBqKtFIMmWXXiJqCynSGZDdC5NMDUkQrOJcCdnRTJtI/LqYPZrYFsVzlSRfviALNVFxv9HK3FKpqrfczWVeAYz4SothJh1bks1D1sdFlbhHjFFQmMqNSKAtsLVcxu9LEW045VnTO17pw94rFa8xEWNmKssCASmXImmpoqpwzM6x5WOikWGj4usiKs72B5LpQcRwblsw0ftbpKTh12TT3bxPFnLo6luNliGmM1iuTvnOC9FSNjVTeTMLsToxEC%2bUQkYL%2bap%2bglDvgY/98HvMvrj299NH3wHa/4wzd//RO2hHzKMO5f8cMPvOY7vu3ZryhW8rseu7iOUDPu4t9bOmiELA3fQxDVUdBRZjiXYh6FGmi9sIYi6SLOC7heFQa4B8iwkzKCTXHBL%2bAXLiqNALedcvEbb7ryq7/5/ctPSqR0KwPLa9/4wDOXnvXs3/6KZdx1uZUi7bYRBI6A80RXVZOiS0U51KiWhbz2dKXCHWGQqIFkMZBx9qRG9rcoxWM5ykbeyYphO7iJ2OymAem8vvHfCYJulTk5iJk3oMS%2bn8aFRn2mz1tr9PiJSX4V3e6YNSW/J5jmjTKJleLsMeZFb4Nc%2b3fZfuh%2bMpIXEfhzcLEBswLH2dBSczhLQE2yXviZgG3xklU8AKvusdAV9bw2s2%2bkPJxdUJpkX2RGPI5xYzEg3chybItD%2b5i30j6fjG32BIBWk7PBrqxjvdBtxnccoBOAi02dNVsjrVkz8mZ9rscKmWZhk2fwyc/sdixgwpp5MX/b7Xp4DWPnyGNwMbMA%2b/UFIzm51X4i5yNtmDNFI6cnu5%2bMA/drPzeLZhrL51C9i0m1TF5Ve7EDHYJ5fl8h005zLx3EmsJMw8dLksGbQtHdRD30hqC9I1WdC3i1adl3JdtE4s9KYjfrLOSC6q52PuGLd3rSF%2bvDjdjBV/xmH9NxiNkJJuds4aEzdfihulGHlkIB72cuZyg8B59XibHTAs4yCc4t0biYcB5fmM5HSg/PDXJ8jFl3etG5qte1/BbXDitAP3qbAvEn%2bPN0ou5NCRx7Wojzjyn2XhYy8ycUeKcUR%2bQ1R8nUJ/J5LhmretG/8lmLt3te4NihEJ1%2bgdkpBdzrRR/ZUh2HBinSWQ9zdcXkElS97U0l/tvLgBc%2bz0cl8rDWohNTIbMSvGJWp5xgAHwLYFpkGBZlScbdOM3YVVjNZ7wG9jNlGXntFvpkSQyfjPHrWvugRIa3gfey23PgzIWoDxJh28UnRT9z2iRuE7D3lbf/Dmc9aiyKqKQyBO5iWwjacKYo4%2bsA96yCRt3F%2buNdcXxpRT4%2b%2bwsqqCYFalMeoo0BosUKOlcGmFiqCBhvLEdg05/djCXIbCxXBIBPHI7gEbTPhehcVqC9c6EvTjPbCxXMbsTYXuTPPgqX9VgKbMxXMbPeH872q15donakis5Fav2Ve9PmYoS5dToEOthejJBfiAWYc9m0/OED1i%2b4oGYiGMDIOqZIU6xtJ2tUU%2bi8D135dagAZOBMe1IC92kfnbiUSvNuxUeVBTlzYHYaKFZ6wKGa/MwXaqi2euiK0F1ZYNZbPbSnapjrj2ncHSChZr8fCxNfZQXVgfKa/6lLPhYfb73vv/%2bHN337Q%2b9%2b4iYnTxng/ro3/v3r7/m8z/zSwUZx1%2bqVVXhRVQZoDgwh6DnF6R9Xadyvs/Ci4zSHG1Rw2yzBvIdWr46H0wF2UgdVtwRdfOcrLu59QYDvfdW5f//%2b/3DySdEmXe/cxr%2b//1vetTg3nz/3Ta974R99%2bFGlSGPl07Yzjaa7Iy8iTvEQxHMKbWwsZzE/NWhwqo3OFdp3cI8MRZdnlqnnGi0elaUbNe90i9C1CIf7PghkmRVkqpwFOjgdqtn3TwXbaHS69j0zgNy8/YxPN/%2b2bSb5t3L3GBWJspMrD2KebfB2lU5YO%2bEMnVHs3sUIfOiUM7LINCCe58nKtTKDIGCfiWLKWUQBMhVEqRkTNQug5C3q7TZ0dJEXgdrOvgYpLmJ1DaWX3l%2bmdLNt1KxvJwLvC07HknmH%2bmh9nwjyqjVlB2hunWHFVXBDacQICKngZsSq9zqUIKmzsZl1YwgQE2RabDq3vWqRxFQ9UaX3b9hTA/DNduOM/fAcrUDVBBc8jgkE9qsOvN%2b2t/ocxrcbDzgkOGG1w2lT8VENEiOKQ%2bvVqWmXYIcuUyNmneDL6NYHAzUjZ89c2DIeYdDItLNgyUCb1VijFAuUcOOeO4VavgOC9oZYbPIYDcxF29gYNNGosW/kmPa3MfBYdEkBd9POzPhCj%2bYoBP7wPSW%2b%2b09LLAc5ZiY9XFovsHIxwaE7QnGTOEmms2mcWhxh3Dst4PxkKDOutcsxvNDBI6WPipsL8DF2dzzusCnrYHI0OB5szDKeUyH3SW8v2M78zZ2JP/veJ3n4uEp45TUvHfeHfvZyD/Q//iCZc3QpwCDO0d4FTj0jQN0ZIHAcTDR9ZFOe2OEtsjhTALzzQ4U4ZPzuS4DmArAbh9jpFZisqGqXlMzsORX9mrk%2bK05CrYvdQV0kMgac86psP3j%2bzeu3pTPXK0QmCZs3qYF/svrTzexH2ol2jhIXmUQBdmlDxvpxLoS7qRh5A1%2bob59JYnQGDsrpEFEnEeJN2oQDIW/KzEFvonYw455FUgBo82wPG4mL6aTE7S%2bKMBG5qOY50rkI9Y0YzE9pzUbiFjO1OcD2rFIz8FDNzRjbc4pVblKyIiepLaKlHZTYnqtgerMvQe5GqmQsc0x8ZZ2ZosTmYgXzq31sHqqiPK8ifXGqqTkys7PO8V6rJKh55%2b%2b54wxnpxT1pd4JHIu0UE7iQf4us5ojnk6OTyg0bzkZmfGJP0ngLR2PUOmVUrSynwALk6ook4B%2b4wGf9lAs1rC%2bCcyTQ1jpoViqyc98vqbsInkdidLFk4lncMIAoB5BlBDtvotaBLw59tB7ML78hh//lf/z8ode9YSdZZ5CwP3B199132d/abpd3LW2sYsJ%2bv1SZiQPUpWdzjImp6ob7wV15Kk2kbVGVXaMzTRHnY20HuHoQgXt3RzbgwrWwgRNz8HFAbDEQkauh3/x%2bf769/7Lv/%2b3b/s3z35SsoFvptNzXcpkXvTiu1/9k9/xOa/%2b%2b0dUAhQTU6PIRbuYwqS/I1NDZNzTgMmoo2JKWTgFP1Fse7skm659lMdOQk2x02mFWjtlTee4Sou3H2g3GmLuxsgOzOBLcGMAlXGNGEpmNFswLm%2b42Xsyvr6w8hTtaa3ZHoeasQJQQ%2bZbF4jivmyQO64Dlg5/QBHe8fOQdS2ZwUHXxRet7RiimHF1Hjy%2bKSYy7nlvJx7a3nNkPo1bCI8pbjAW63ojIP1aicfjIPzAdcWBZ6%2b%2bfDig6oF3nMUeb0Pq/FWSlgQsTGCzAkB%2bz33wxS%2b%2b3wT6lLcYxtkC3QwEzD7Uc1ZOQCbg4jbVumKF7fZrB4QSAPDFMuZ2IYO72EKq448z9OMSHBNIHCTPMQGuOQ/z9tgzXzhWefZW%2bo0CnKU4qPB%2bVKsEyE1xdTFvPwGRmiU1CacMKof3WwKoEn2yh/vwJMOAjPfcm0St2EW7X2CqzmJg4wm4imKVZ1F10aWPvwbuO4nKUpwNt7E5mBLryW5XVf3t9BPUZYZrBN7p9MPnG/x/Hei1v5Xidx4PUC8zNBsOzp9PcbsPTE8B3dxBvamASVgA708ifG4lRnsHCJ0SZ5sVNK7EYg1Zd0s8nLsk3/eCdXPzhzO7N/A0rsMg23swshth6B9TzDwfyeGjgYC3xz%2bQ4LZ7Q5x%2bT4wTnxeOElkJPnISUwWOLvoClqebDvxJHw13gBAKvCezHooEODTlwA2B33pvide/0MFzvAR3PsPHNhNVybrTkrCrSsrv6D5J8tEk5l3P8V2nHCs/7rECTmYc4ecE7QasX49pN/fpHxPjPiQt9nnGXfq2x4kEv41GiU6fWn%2bgT3hirB/JLtcizA1i7PQdNEkBu44EstS/s4YAgbvxFafGvUwd9CavB9wdbJ3vYyv1kLRL3PVFASYmPfFyb2QZ8kPK2qm8OEC4HCld90aMrbkKStqiLkdorsfY5HksVyTApeZ8cy4S1xiuP80qrw5xFbBROFhyS3FkmaU9O6uxC5euJWUOSdESztEqsgtqYOW2vH98nqs5Rxo1bi84LCRZyLrF%2bb4UM1opPCz7isyyb/UYRzaUWokLjZbWcMcrHQa2BRaPVFD3StQHtNBWxZREIq117vb%2b59MeVr2avGTmsx5WgxrmYgXeyca3mzUJeiRg4P3oJxhMhmL1GecuGn6C/7lTRacdf%2bINP/QX/%2bbj7/rS37iB0eKaqzxlgPtP/acPvv4Zz33Wlxbt4q7VtVX4PpNTFQsZoI0UkxKN0VlGJIphDVnSFbcZsxRpT1SWvMEuEoRBDcfmQ3R2S2zNRlhby8AqtjJkFS7mp3x87nO89R/%2b8Y/927f9zGd8WoD7a3/pgWfe/pxn/7sX3o77z5xrIcsKRIGDKHARRCWKDIiDJiZcZeGmmFk9O6suVDqGYtv5zfgjV4VQooqylmPnYRIMp0nHnU8MCNMz3/Li52Izkfzd/lxFuHv1xIZdtKUDe8AgD3ATmkqJx7X%2bXXl5j7TgtkTFDAjjMhkBH3r7/RJlbzQxkqdhr0u9rQQU11qs5MKDALGRO1D2YvT0xorQMBXXUDQdeHRbD86VCFDJNnOxkzhFVqLbkmkD40me5iB81ly/3R4xtLy9tAG028U4262SG1XD5TmIBENmBRQw5j55TNPWeBy5dqs5S9ykR3NtLiWnpQIltR9zzQTQPIbN7A/PyUralCBCM0IqANr7t/Q1/bkKvtQ5yXmKFaYuKjRQ4ITnYALa8dkCBhFX3XcLIDIoeiKyMwPaxaYxayl7RhkeVbRpZC9yb/R598VfXrnBGMmPfU/2a1zChpKxrROIF2gQcBtWTV7Se9GNSUrtO9OoUMvuzcpPFzn63qycXS1fF217p5eIXIbLbkdZQJLJ5r1vTgaSIL7ZcvHSt7toP9KD22FRNyaNupg9EeHQ1gARnSVLYHeTIL9EducEokfaeGSmgnvaA5yZrmDq0gB%2bQMbdA9PteMTxMYptrPV4geYpSgPU0No6W2Caf%2b8H0i3JzEjKad3BsW0MQ2/auEgkLhY4%2bdxINn/8gwlOPjuU457%2byxgnn%2b/L%2b0ASVWPgyHKAbkclqbI/elM%2bjk3FqE6FmPVz0d5iOcCJIsMvf8jDs6YTPPu2CD94X4Ldfog8L0Rf3dRjAos0EbS32sCETv5WINvUft2vNSiG1BStt8H7HgInV33G3KIbBe9PFAA9GdvL/CnJMRZTYsJpGKKRJNjVfzMIJhztVkOglQxnG2j9yCJLBtTKZKl%2bufJ%2btaIIIQv56AqqrBS/22bl31LaOaUy/Wtp3DXjvnV%2bgDxPkFzOMfWiBpYXI9TLAo08F2baKVSARlDMdjvv5aBYiuei4vcS/nIVhchUWAFnNM1UFi5mKlI/SYLb6HiEy2cTLLg5cLSK9HyM4GiE8kIMlz8vDrBWeso5h8nXYY7LzE0EAf0oOLaBMwH8ldLBkl9gjWVe9fvePDsp8SaKI8XWm68P%2bQWuZHTLAhZcZWvJf720wJG6B3/Wx8SgxLkCOMZaDTUf9JYYsvN6fWnihonXh%2bd9mk17WAlqmI%2bVFpL3MluoIdzqw696qAVAP3Mx4Sd4oF1F/QQ%2b8ZrvW3vX%2b99w6AmrN54ywP0nfv302%2b6848SdflqKVMYXjbuLLOnADxvKEjKiJWRfHqDYQ2rgTn93nz7vCY1HVVWgzK2h7hU4MR9irRKhkxSorhU4E%2ba4rfBkoMeMi5fd66/e/sI/fs3pd335E46SbmWQ%2bL13fOJL7/1nT//F1sXsZJyU8PM2ooon06GUAChwrZCGAhAudtJJcYtRsgvFzAe0fjTlOfWJMEAho%2bb3W8oDXnsVt1oqOYmyA/PyoCxJgI7VYgx7OQ5EpGSzxYDagM2w9fzJ8zXb2mB%2bP0nB9e7d0K6QKxpApwGYLQkx6xmPcpsR1pte71BP6vfXc9eR%2byj3SclrDCv/RE/Czk%2bwZ024X/NMhgOjNetg1jVAbhzQ2eDOJIfyHtufGyBufo4f3742M4thXugGuNtSmGFbq2j2fJ9RzYDr8WMZwvhaZKgN2HksA9750%2bzPsO/qGe2duh3OCmhJyTCI0MWjzP5tvb0tb7FnKfZj8k0bsfvm%2bD00Sc9KjsQE9jEwzpkHa5bDXIcBV%2bNBy37tz5Y%2b8REY0E6t9URNse0cZXr%2bNOrZlvxUSamlWEDWsg30vFkwEbXvKX07l1q2jp47p96eHPB0v2bV4V3me9QUeJ%2beDLDZynCh5eHb/wjIt2OkOxmCULloTB6JcHhrgAodJunssQWcbkT43GCAXdaHcoHTMwTtKiH1YcfHc7wMn8xdhLqhUKe/fbbE9AkHrfMlZk952Hw8x8wxJTWSaXvPwebjBWaOO9g6V2LmhIOtsyWaxzXAcIDtMwWaJ3R5RxvQ84LHGqNh35dPhfjke2Ocem6IMx9McOJZocgjz/3yhNokAAAgAElEQVRdihPPpu5dsQB81pz2p6xu%2bZAvwL3bAfwJH0eaKcKJAM2AlnUQRvVYkuG9PQfheoJ75l386BdHGCSFMPu8KkqcKJdp9YApPaM1bIeOhzLeObDiKkHVRNhFO6kPWXdeIhlnUyFXLlmz7gS/xj5SwJu%2bF/%2bY2HW77XNU7lRCONsKkLeZD0BZkMh41EDEolgOqx1tJSO/dr0TzymxSRcZiaKUBeTMIAHx%2bnSVuvQQ3k4C11fWxju7JQqnhENnmZ38OsBda9zP9VEUGdKVFLNf0sBC4GFy0kWcFZhzSmG52W5N%2bDXv52LOYYJLRYypOi4Xcx9LniAO9XWhGPHsfCz9xy8LAeZcZmn7KH2ilKDgsK%2bqWCvgroM0bkP7bYJuKyFU6WJGM6lmT5xdpojGHge510Unx6rOQVGFylSHNQUezWxOBgeTZSbA3ZvxhXG/VAJHNXDnbBXXnWbesObcJhm1c%2bgxoF0z6zyn%2baSHtaAmblJzcV%2bChCAE/MhDxQe6Axf1MMEnZmtleL7c%2bL5/vfLmB375iVtCPiWA%2b/1f9weLP/J/vfD1vUblxTuP5PM7rR0B7SpSZaMzl2HY9wkBmMK%2bm6WkfKYmIJffJVkhUyXH5iPkaYHtRgXtIsfCLpMBSxQzZLNdVCex%2bqrvfOdrTj8J0xv7veyu9dmpf/Y793zTK44%2b7xXfeN8vXfpYKtNlTr6LSuhLksoIuFt7seb5aelI72WRC9SUS8zVU9vqLVipquIsbO%2bpSJCuZskNm6qm2EegxZYemA5Hn2QboA1fwhZzJwyLfmnZ4MRsdytOBjfDjtv3/la3u9lnejPr24y9DeRuZh/j646z%2bgYAjwNwA7rtZ8h17fXsZ2qDVbYnyarXTJ3NQg/Za248ZJj0OLtP8pthf%2b2ZHG7Kc1EgSWE5sh2mTZoCWAbg7UloVW%2bS4cIXQbubY0JswxTo2W8ZlzKPr8PzHAYi2gbRrGMY/2HQYICaHrbsAJbbCCuv7x2BttH122y9CYD5nPhMDQs%2bHO50zhsPNR6ImWdu%2bp%2bRttnSheuy6mP30RxXAnACdVrOeZOoFLuabVeiO%2bX4pW6AGb%2blIRTKv72abQhor%2bVbyrc9p287XWRUalut4qDTz9Goeuj0MpHN0AKRMwNL8yEe23bw2KN9vPJXuf8Ms/OKcdsdAJ8zVaKbajdJ%2bi3PAJ1N4JGJSEAHx9epiwOpUElS/5FCe00TXGhv9xaB%2bEndgFwHrQs5po952D6bo3nMQ%2bs8hb3qbjSJBpgUeC7H9Am1zvRRB5tnS8yeoJkABNgT0JtgwLjSjDPykniaUyoT4rEPxjj5nAhnHoxx/DNVxVa5hUYXQMY9A44dDtAd5CI7m5txEEz4iMoBDi1X0AwzsX6cDMkSewj8En/84RKTUyV%2b8bkZjt5eQ6dLsYxiY3n/ZKHnum6bu2znTPaTvqNcjOTS5bLpYa2ENEouw6euBgajbx%2bXTJpkVW5jmHnTVW5Wz87nyeV6WvnxfnyzAYJh2/WtUe26KNGLItTTBJ2emp2QHBHOGpoiS5vMANWMOwN4HXWbMa2t83xMMMwcEeZoUdaxy/d4WYr7z2C6jpQJx6ycusdVJsZKFqEyaGOnGyErUqyfB448s4rGMbZ9D01KUdhm9Dh0lsWXdHInm5Q8NS3dtCVRh3z1VMhm83kuODlK%2brIfjbB2NlH1ESh18XNcSX1xipHrEmJw7x3nuoPVjF7nMqvF4y4xgZwuWKsJtqcjDFZinDoRoXtFBTdCIiypvycWQrRXElQPUYfPs1QSg/5qrGZsF0IxaDDXk5YOeilwys/gex6WZny5byciSHBP4D4x4WOnnWFywod3cQvpkZlhfvXU5g625qbQ3NjF1uykyjcZdLEzUUet3cP2RE2Si0OvgCfWN0A96eFst4rdBvBLv9n607d%2b/8yLx9vdzf79lADu1Hm/8pUveROKpfsdJ8Zu3BcXGbaELmdvHAeRS1vIKZUIxUdIlj3SlRzkYZeo6gbX5QPKIIz70bkQgUcNY4F44KHD5JzHVcPpTnuopNn6z7zuL1/9yJ%2b%2b%2bB%2bccb/tS9758q//yvo93/d1n/PqRy4o4D7hd1DkjrAhyrd9nKChj7tJKtVjrYAaVSiBUhAZMA9wCOB34y92GYx0ot5Bco5xVnLIZFvygiH4YqBA%2bYWWFnD/%2b4F4W796sw37n/L64y9E3gtbFmPbdBJIcSbFzk3gs1PWm1fLI8zLm9%2bZAG4PaNdA0ZadjAeLBgQTUBLMerSg6%2bYiqTDtclwzauNpI8UgYFCgWzGXYvVLmQZzNBwCDA%2b7nUycFTguDNel5KBLKYfanj939PFths%2b0Ie6L6xtwb2VxXtdpw1zjeHu0Px9n0U1fkv6h5TwSfGv5jWG7FEoYJejyntuyHdNnGUQbYw8jLxqXuRnp0fX6jRkf9KGH94VgeqJG7TnZdYLqVL34rbe/32ii6G5jQHa92EbsTyPvbMNrTCPrbKNBMsCdRiXdkHWGugnO/qXrGLgzV9HRMtMRUWvvCqj/m0dc/PXHunjjgyEmyhT9FeXEcddxgAV/aJv7sckK7tnq46OTVbzAH6C1xaJ7JHYcrOwClQB4tPRAN%2ba7/AIPOS6650rM3%2bZh2wB1AnR9fTPHPWyeVX/PnvCwdZ4M/N7PzPfTRz1sn8vRPK5%2bzhxVAaND5vWMAvFcCOSbx/SUDBn60yWe/vkRHn5fjKfdG%2bGxB2KcfHaEMw/EOPGsAI%2b/P8WJ5xDEK7tIvt/ihDr3EP24wOKsg%2b0d4MjRFE7ho9IMMOVnYl9XrXtYnHTwnk9muDIAXnIU%2bIH7S7QHoTCWdDXhODHFpGtW1%2b4poM6/UXpo8dlTKq2nHPg9q%2b/mPt/HBry7mAi6yP2aMNDj7xHDuJv2x3ZMfb7tFmXAyvWSYgkOydxzMe40NwLIZVy5iYRXGVW4jc65kQNaAxW/41g7MaHWwQyBurb%2b1Np2CWS1x73IbbQdLSVJO1GIaUpuZIxUY3iWlGj3RRyCnXYOLy/RqlWRr2Z7gPtgK8ZqEUnlVHc9Q23Cw%2bOf7GPmGXUsngSaTU%2bCu7QoJLg5qoMxEiCC5WnH6ABneuo7kwjK56TjxCH/YUtJeD2SZ0i9OKh3z3Cl8ERGw%2bdyoQec4Ey%2bEeh5LpLVBJ2ZCAEdv1ZiRIci9FZjVBYjiQEHqzGCRVUIykhoplsxtqdCqb5aOB6mt2NszkSYbSlwz%2bNvTkayPjX40aJKsKWfvHcowmSSIICLxeUA1YHKHUgZlGrfdglNxL5VFfUxxzaPuDHlY5LgfXpS7s1ivwfGMVyY4MqggBaeYaTyblZiH1ONEj/2x%2bmlwZ%2b89dlP1BLyKQHcjzz7Dff8q5/%2b2rf4Zf2ushygnxaoc%2b5SGWigFzvCvPFOR9hBiibyjBKaCWQxe4zw7KCne54qmoBSk6WpAHNTNZHKtPMC0VqBS34BKggZ/dWnQkRptv7/fJqA%2b7/%2b9Y%2b%2bfvnpd3/2cw7l97e32yiDBoLIQ5i20HWmMRW0BMSPk4RiMTVMLNUyGv2W5wBg2DoSIoZptgdSA9xlKsx6kx8E2rmKYUb5u83G7wcEDENvs3ryAiZrqdl8bmdY33%2bMesf97oWRI%2bx3zeaza13LEKxaU8RmO5sN3fc5mHl6DSZscC49Q7uyUEvO5yraaw2%2b%2bb0t5zhIcmHOxTxrez22K4Lb2WnaaY6kIuNMubxUexoE8y0x1EMr1ePI2pIvu0JYD%2bo6G3WjY9RnYWlB%2bSLjRU3qctMEkabtkpnlPg1Ly63bgxITupBXVwBnoBhDS1jJ8USBdeX2I4GFBvoMMEZg3h3KyeTFz3swQ1efa7WCvd/tB%2b6N9MYkxnILNWWtXpxm4B5nxsfZe3Me9kyJcXk1MqShtGzslK%2bandHfMzDy9MOnTKXTZXDkS32Cg8YIXTJFvVNdR4wFRuRbCa8%2bjby7LcloXn0WeXcd9ZB%2b77PIO%2bvwGnOaPt072slshrZxJZh5zyd9/PaDffzle0t4eYGgrnyU7zwCCQyKFPBMpETSw3XwcCPCM7oxTmttO7WpZ0pW5hZcihOXS6wc89C%2bMLLZ5HXMnvSxeWaUw2L%2bNomkBO9bBPT6Qg2YJ3gnU09GnoEAHyh/F/aejPw5Nere8/kVfOTPByLLIVgl23/nCyI8/F4N3j8Q42nPifAoQfyzaCBd4vzpFMsnVIVUvuOOLAWI41ySxmebDsqaj%2bVmjHAiEuDOmQXW7JiuutjuF7iykeHRXRdv%2b0oPQU1V5HbcQhVmkk7lYcLbQRlOSbLqpMeM3indd9nvPCDZBaJJ3S8MV2v6dz6u2By2OjM28vEYVt52miFbbb67HpNumN2bZexvBODbYzKBPnXtfOYGnNPq0YB5erVTRsOF1yIy0tkQ2BLGUYDpViXE7CBRFUO1PEQYdz2raNqP7yvgvtsng12i1S7FsWQNIbLVDJeTEl42KsC0VlTQL1K46wUKN8H2FSA8NYGZ5QRHD1ek6mqRFzJbOQTmtCatAefNGM6EaD0zbnqeAHerqu4YiS7Anf/O9oBlBnR6xuoSbS3tlV0X0zsZdmYCZOsxCK0vVSIsDWLk0omAymIoIJ6/E3xPtlJsTgaY3kmxO%2bUrtb3rYHonxvaMYucr8wqwz9BP02WmjJqN4nuAhGd1IRLWvRpnuPN4gL4EMKUA7hm6OemxVtqOliCLsxJdZPRNUG8YB1PtXcRLTdlmcrODjYUGJtdIGnvwXAczTRavLDFIS8xMBnjdezO86yd/5TMeevCJWUI%2bZYD7T7zua98SOfW70kwB90akkilFP5twkLUvxRHgzoXadvMAFIBxkCQdZKhjoZZgcaqKjSq9SjOwLtGFqESYM1HCQU0D99e/7i9f/fF/YMad8qD//Rvufv0XfO6p58db2cleZxchq6VWZgW4Z4UzrJSqZAmeaBrlxbgHbgNx2EREazc93TvoOajU2ZAdq%2bCPqX44AnT2S5ig2iSv2WzotbTBB0EXG%2bTbzLytlReWUHccG%2bxea7bg4OPduO2hzSjaTKgNUk272y%2bR0AbIQ/BMoDzmtjJ%2brvb%2bxwMWntN4NVDzN50JmNQot4rJkFYBLPOdcWHhKMcXx7g%2b3X7ONog0z/lG5CMGkDd0roS6jw46mskeqkM04ObnwpTLYskfRAahPifTZ3o1nUbavUxY3d1ejklWqu3R15sgWiVB6rug3EY0zuDn/L2uzBOG%2b6xpFlqsEbUMgPsicOR9VJaJJRrCHueos6Ko9dB4XgwYGrrSqLoKzQjdYKcwV7/f6gdp8g9q4/bn44D8IJnVQbMBMobo52dkRLwyCaQa1Osp/TQXjj0iW6EjkjUEGwsAdV6FFFwiyy4ymLKlPKztl7ieEvDrZN834dWbsm%2bOZcJImmjfaow8AwEcTBRr%2bmDRsrd/JMPb/q7AA48BIZlJD4iWfCzGmWKMM%2bChyQru3unjo1NV3N0aoNkE/i6L8PQkxhoZdx847TgIPeCIBdoNmz53m4/W6WwoI%2bDfG/pv1RF1OyhH4H4PyCdQ14w7r42/t7TUhnKau15Qwcf%2bWjfKDMK8y5jDZNhzKsnu9nsjPErg/twIj32A0pkQV86kWDzqo8wKlaCaAglZ90Os6wDMzlLr5mOpkSJsBJgIMjDmiaoupqquBCqr3Rx/9lCJX31pBaeaORJWUx1obzHzfAsPE7Vc/N2nah52%2bsCUt4NWNompCrAV%2bJjubKOMJpTJ6HV08MPOqpPLSS6QMbctIwl6ea%2bEhTfs8I32s5Fc%2b7re8DfSv%2bx1TIDA8zK/8/z5N2d4ZOxlwioB%2bx7GXas69PuarDrv3U7sSDsVYmCsj9jAXTHupSRArrkhktUMSeBgq%2bUidUokmnEfFCmCzQIbfAZrfbiVCIfvBSoTVUwST5DU1GSAAHL9u5G28FpNMSODo8hMH6cKRIN3Vpo/21dMOheaxfAzjhOHK8C5AbCwmwqwnttOsDMTSd/vr8SoHo5kvXQtgU%2b9fSXCsSmgv8r6rw7yskTlUIjBZTrqFcLGT28r8G7YeGNJI0GPJl%2bixQC99XRPXYRwMcL05kD2STvUfMrHbUsBag4BfYncAWZKCuyIjfbWESBgZyEy1bcVWVo4jow/7GuHEj5gB%2b1BIfmCTE4lQcExhBdLw4%2btOMDvn8/xph/42Rdd/tiPPSFLyKcMcCfj3vAbd/EG7/Z7cGX%2bXbUOsuyZO4Us7cAPlDyGUhmPjjIm4YERm7uDBFNyo6lkrwcplqarWO1U0ZtJETEi9YBzXonGjI%2bJwkEe5%2bs/83//w0tlFu95wz1/9e7vfuPupfJeP0iRFg78hEmkrJ5Hj18Cd9WrCMypZeftMO9CsXGLVTVC3gS25zicRiVrKXnCRBN5u4WKrgTKl65hYa%2bXNGikCiJtMMtNFuewpTU2eDe7M8zhuLPNVeXsNdO8B9xzJzrTZr%2bxfVyGsVfzrAZbau8I7uSe0PHESpcwLLIBwBJwlGpw5rSoJBlqoGhcRfggjK3hHkcWDnb7%2bIUbsGWCBAGd1tSxnW9gQKrteW6%2bH88z0Lh5CC54DVyX90QKtsyw4qqCqMPnXHERUsZg/Ic1Sz6UqOzztlMvWc2sE/Rp3TN/GrC9K1adDiarDMLVk%2br0SyW1IICnO1BPMXZkduUea4DOttfuKa0zlx7BhXZBqNMhSZIjcwnoObjyM7mH%2bpgMBHhMAf0DVuzTchKuW3UFrJNh5/EVq1zIi1j2IV7jGtDLeZlz5zo64XCfe2IDf/M13Vd4LQcFRwIGpINc/TK5UZBxLYBu72OcLVfOMCoIUjMTlMKI38SBzLq0Gw3Uq9m21jertiSBmDVG%2bRNNZF3lFe8TqHe3VRJcfRZZdx1ebQZ5dxM9zKCGDXjVkX%2b7OW/OGrLoVCV0sLKR4V0fD/AnHxngg%2b8vUJtX9m7%2bgo%2blJENzQgF35swNg6ZSJag%2bPY5xZRcIPKVvPw0Px1dyXDnmoUMm/ITSrz/LBz5UKEZR6ogY3YCWB5DemyWQfzQberTzXM04JAD%2bcVXycUbLauT340piY2ZVmsuq%2bhEdPzIiCikdX2LrQolnvqCCj/7VAHd8ToRH3h/j9vsiPPKeGHc8L8S5R1ht1Ze8LQXeSywvhOjFObrtEs1JHwtLKZYOR9jqALdPZwiqrnh7c%2bH773cfzPAjz/fwwjtdxClnqJRGgYCSIJ3jFZu8rXUvSxeTVQa9tCVro4wmRc6xOygwVfWw3WWCK5Meub1OTOEB2d%2b0Btxui0bjbpjrofRFgyc6tkiBNX1jjRxvnImXAFQKFt1YUacb7VP2emwHHOelGirfEzpwk2DDqibeZ3VUfkCfxM1EBce6h2xVImHdtymPyRJ09Jhsv5uuB9zjwMG2Bu4xgXtZxSDP4G2k2HY9OGT5OyXqzw9RmQxxfMrB5Z0Cy5MjK8MhO6EHKxYcMvdYwGoBHKkAZ3VceTQCWEvJ1Ivh%2bbJvmFm9QiU87Bkv4tVYmPcVBhEJixg5IndeqQU4Su0zgMu1CItS4Egx5pXFAPGKmrkwFtUK/RWoHIoQr1Kap96E4WKAPv/WwcOQ0iFGEd17gJ1LMRaWIizkGaYXAyWFYV7kRoLmbKjkQOYeaL92QxLwHObbbaxMTGKWjPsC5TKObM/tpnY78AIXru9J/YkwJKlaYqf08YfrwFt/5M2v%2bIy7F//0zb/wxbdcQfUpA9x//Ke/9i1Vd%2bYugEUJBijo2R6ONOz0Cs3SXQ3cjVREjZghdhFEU2JtxQtWKQwFFqoFmhMhNipVdOIcnleCncO7wukXF%2bWMiyLJPy1SmWNf%2bEcvP/tn//y1H3s8Ozno7CKid2l1DkGyhazwBLSzsQxpaY3ehoBdT7txQHEnNOOuWTSlfVUbGB2z0b7KWGp06Rbjacs4FPjTFhnD5L6RZOBGBj%2bbzd5PWsOOtF%2bBG7NvG8QacGonRw0ZbjYBPVs7rvO2q2easu0cfO3qmsYNxeiyx20FjaSBP43EiOdobAy5X7MPk6xp7rG5FgOy%2bdPc%2b%2bE2Y/Ihs40ZlOgEYjzGjQZ6GAhIUvL%2bNozj91zwodaaU8ut/bWGPPIwaU4jHg60bAe7IiFRs1/SLATYUuesQJ4CuEpCs7mtQCqXkSbauIQoMCx5Kz2FhsicczFge0i/jzUwGZ%2btkUzpZV1xVTKfC6FbagZ9yM7r0H9sFOS0KsE6z8NMnXN/duDAPxQbPwoNh7KRmjecFTCzAyOtvQpolO5e3TFhk8cCX6OfpazIdDU7B%2bBafcyAFSGf9olc98wqGSWDHi/k3HitesqegVatoryWzcwGr9v2Y%2bdYqizi1CIsOcF7MI1qoYB532sK084AmFp3AewWiDcpjB1Mo16QcZ9B2tmSdZXPO68mF4u9yQatINVPeeEWwOJMhE%2bcLfFrf1Pg997RQ34hRzgJlMs%2b7lpQBaem%2bbrIgYcnKrhzZ4CHJip4encg13aJig8P4h7zuONJMZkTKznWjnrYuagA%2b98p8lhklKplXr1Iy1V18jB3u2LiuQgr/2gmDODsCR/b5zI5dwL57TOKvefCptA84WHztH4wIqNxsX1OudRsXtAdTV/3nZ8b4aH3DNA87ioP6gQib2GBpjwpMEgLHF4IMYgLLMx52NkF5g8lOByU2KpUcWczg1txUI88zNLFJAb%2b6MMZvvIE8B0vCKSYDME3mUwD3CXIpSd7VWmyqQs2EyKtPu0j9YwXbQvJxru7KKIplHmOghcaU0ozpW%2bUETsfcD%2bt9msnr3JtW0YzrmmXdqg165Sy7Lcc1D%2bu1bfs5MohO60tl82MAN8h6mEqIO/MhnCMtt28SAhwmcsQhZgZxDI7KRtwDDb2s9MhvFYy7Cd0ljFSmSHjHgGrToh0JUPsK8Y9c0vE26lYp5I93tkN0Gh4WL0cY3vDw8KdISaf6eHEBAS487D0XV/sZwhZuOtKisqCslztrWYChA05xJWtOo%2baOlUzTGqs9dBbi1ETMD3SmxualetVDkeSeFpfDHFmF1LNlzsKigKrVaVF58K%2bsjiIURSsqUNZUSGM/FKi6tkMg7YSWKkGWBikWKmEODRQFpr6EeidqR88RUqj53sx1uMC9y15ODEX4JN9INxJMFMlwlQzr1ympyNsbMaYmYtQXd1Bb07JwmS2QR6Zg%2bndXSTzk/BXdxEvqoTVxk5H3qe1Yw004gxJVqKSFvj9doR/9b%2b9/Uee97zWf/3DN379/7%2bBO5NTv/M7X/KmEofvdzBAZ0DLR476LkLsIMY0KvKTlArZZTW4NSKgE%2buwix6jUIx7ID8nsVDNsTDdwEXXQ8iXQlrCCQBvFdic8zDHqZok/7Qkp7JS7I9%2b02e%2b/OHz%2bcLu1jacaEqKLlGjRe/UiWBnqG8XW0fKYRLNsFvWjbx6sr%2b8I31WORyLfg%2baRpf1zH%2ba1SZIEVAnyX3KiUPYDK3/LZnEoTudDfT3Aw/XStozSY/Gt3vcM3xcvy0d0lRv1IDD%2bFDLlKX2HLZlLMPRwfqF1yLJgJqlkdkaqSarGPeDghwDtrm9sTiz/b55CAPkx49rWwOOA1OzXxOk2LrpIXOuPcOl2JBF6dpA1hxzv4DMfGeel%2b2yYhI3Cc7JrhvAKc9cV8EkiKNkhSCb7DT/5kKwPZSZaLmJYtDFY264GHkFq8GS5Tb3nudKK1N%2bxiDAAMU619MBAR0zbmbhPnmerMB5UBAgLwwOvOI9PgL%2bAky0KwrXkfMdk4eYgMEAftmXDhgUqFeSG3V/VKEh7kMVHNKL5SGvrM/UonYzAm3yoS01GWvHwzwCu1HodcxsCPdmAin5rF%2bKBImLzDiwMJgcXM9M9FUgYy%2bGXedMnnJ0MKx6KTMTFrcttgEKoBpJn2Icu5hGA1voYEZ%2b8mq7mEUNm4qBrzUlQGQRINrtEbBz2e1qzXMVmJ%2bJ8L4P9/FbH87xB3/rwz0fwye5sRjiOGcJFoCUjjI8NC2m54Bz68DReeASrSBpB%2bcq4H7W8XByNcel4x6657Vu31NAyxDr12t3JAtGYMYkKBywlXqVySJ3htvSku6kAv5D1xrtUsNntXk%2bx13Pq%2bDjfzkYJrESuB8%2bHuLMwwmWjvrIswKDGFha8KXozKBbYqoZYIHAvVKgFVYx4WWg0%2bxymKPJHI6Kj4%2bczZDsxvjlr6nD9SgdGMllTH9lWyfjTmcZNjH%2bLk1NGqyLUoNzCe7pXlPVbDu/thn3691I9jUWYdPP2lhFShs1z39UqmUk9TBjuN6/zdybsVEY%2bwOC2/1Oi6Cd%2bxkG0vq4Qlbo2Uhb3mOOY78L7f2ydxmmulWJ4O0msm8GSAyIhqhYv7PZRgjcd3qlVCTd7pQIygw79RqSlQx938H2toucwL2lgHvKWY/dCjoO4O/G2G55mHhagehEFYenXJmBYh/Tsebo9Cz5zLFpB/0rqQw3lysBDvVTRMyduJIKYJa/D0foXYmlHTOpdLCaIjwUIF1NUV0McF4AeoxL9QiLXRWMGPFhqR0CNyqBJLEuamDOh7MaBTKEzA9SbFRC5FcGCA5XEF/pI1iuiS0m%2b8xCQmmNumd8Hhc3c/jLNcz3VfAggJ%2bdgUH6Zg5y95wJOjHj4DOXAjzM58c%2bvp1hrq7IXfZhU/BKd0ulqS8LTM9UUF1tobvQlHV4DtW1HXTnpjDdbqO3MCGzVU/zEzU1R5UaSjy%2bFOD7v%2bny/5iI3/7Nf/bmb/2nAdyzfOZ%2bMiEGuNcjR4B55LYRFxOKpQuV%2bVRHZlXUi4KAnY4zJthVzGyJ%2bWqOOQ3c6SqzmxdwrqgHOFnxUJt34dTK1e/7nj97zel/QI37fV/3v7h7E2jbsrI89FvtXrvf%2b/Tt7eoWVVRRhUgviIayRdGhieaZKMb3fIkaM9ShmBhjYqKGYTAOE1/0PeTJUCQoatFIK41YGBChgJKCaqjuntud/pzdN6t74/vnnGuvs%2bucW/eWgfEqG26dc3az9lpzzeab3//93//OxR96zcs%2b8u23NtrzEYoAACAASURBVG/bj2NJbGDnKBZs%2bOEeetYsqm5bdqKThyrywH7q1lSBFV7w4aiBIFbs1hFaMvfJvH7dPG1kEuKkIQza5LsmuldOZNpKbxpYZHKKa9vsTU%2bQ00z8tOd33hJvmnWXIj5a822K2/S7Ew24AfPTiZnT7Pi05tuw3zxXkwyY9/I2r5uohWHhhYGfsgY01ysbl6nXTkpSNJpOiZ6cANay%2b6Z/0Xuto%2bAuz75e4zhZREWvHdRy10pKWmKkLMKC6wQifiUBoLDPOe9dPY9mz03fa4LwGwXf17HO/53eYsD9NCi/noNy4ZBrIlDUw%2bUI029kNxoU54G8JNgywalIxo1yIuV4w/lLVQhV8xoB%2bQRsT6ws%2bVnjzKNAOMGUJYA3776jQIaKFohNmt4LiNQIrOg4kScd3WEdv084UkyJCzC/W2/qVL8w5zLJJVAzMx8JemigegS0WyDrXsUeumB50xRVlrmWzYMC7vLQ4XgT6VpdcPHR%2bx38yYc6eM/HXHjOWKjxeNHHGW6wFoCFChdtYHUW2NhRoG2tqYA7q6RyfSXrTuA%2buByDtY3uY8RW0%2bsnAbBj%2b8Z16q9P6lcC/E0UJqeJ5/sFyG/EAroa68pZTFozpISS4N0T8L5yirI3YH3JwzCMxae/XnOxtMIy9w6Cho%2b6G8pmpVCy0BRdLrDbTfChhxK89R8GmPFiiXzud5QtpHnkgXuNEhpuqPizT708QOad/c9iJW%2by69yPiE7GcK/Xv%2bk2xI/4pHctlFn2Uz%2bEmCHjn4tY5Zl2UxQp386KbFLP8JhPlehqPsv%2bwWObY3KuMEDeAHbzkyy/2Sww%2bpvfZJsWoKXjfrEAvz1Co2iBBa54/Am7PTlrZSqRgjg2Sjk3EEin6HYidAjcrxC4O4isWOncWyNcQgmVQQuddoAON6bdAQ46HppVC%2b7NFlbXVIJq3t5CbdQnLlRse7lTysdVbCgN000WXMUJUkRwsDIcYYtFplJgcRRiu%2bjr6Jvun5aFBSbhCpD2sTgMsRV4Asr5oEztykEsG2SC7pAgfbkgP4WRXwwQbQ1RWC5itJXTrsped5LZZ6haGd8NCxuHjAcS4Ns4RfvHfUa7EjEzCGo2XrHs4iAB9iLAb48RW0qeM6/z7AxpY/qYBEhzHArfuxYN0CEbTxkz0xnaXZD4n5v3UG%2b6sgmwRjH%2bZtnH77%2bh87nO%2b9/0LR9%2b10/%2brw/caQdJxt22BugO%2brCUjYzZ4ktnKPtk2E1mNgE9HWbUpKEeTHSyMB71MLLKWAiGWF9sYNgdYrtahGcnSLeVthAzCaqOC5vA/cc%2b/LOPfugrZwfZvPXX77j7j/7pO88tls/uHo7hhgfo2zOouwfoWzNKX6iBu5LGHGDsN1EYH8hCrwolqcpnJhzdZ3JYdJjpw/IT2XG/55MLzcLPRd2wnYb9o2RCsYaKUeR7lL2Zujd5m7/85HWSpncavJoQbN4Vw0QQ5I7mvMCNT7aRpBjQz85hEmvz3uIySeaqc/J4RvOtu4v0q2mQPs1mT1fTzLPrRuv3VO190uvTLPq0S0v%2bc0c2W/qDx0VJzMYruzfCsFLeMpn8yDaTCeb504WFTKywsFr6Igy8gEgFvvNbSHNO/38E5k91H8ik54G3RBJEF68AtPn9qY5j%2bqZo6UXnenSjY6RA4kXOiIJEKNyM6Vb6/bz2X4F5ji0DW8jsq421kh6Z19k/ucmjJt8sMMffR6Xfz5f5JEvOeynREmr/n%2bJCCdwHbgPl5BCdvi1sONlHAnaeH20apx8GtPP5fCI9AXsJBxraKVAvXJZMAmpTOFVDTq0Alo3lORcf/swIb/6LIf7yTy145xRNc%2bsKq6kmcOeBkGSOBtSyqM8CT%2bwAZ%2baBq2TdKUW4ApQ94AFq2PVSQD3uU7XDky4yHyq5QRD/JLkNJTZTLjazpx3sPhajsWIp4KmT5AS8x8DiuockijEesxK2SlAlkJxpWEjEWSZEYRSithKgkCYC3MlA8lHwgbd9OsSvfL2HZ80Ai7MprrB9rgHc24KjbFSdNlpRTevdFbvO6FzNaiHxa2r9oesMdUxaw6hoId2rj0GthnHn8WuFHlojpc0Rxly7fuSCjUfmIpMcapJdBXTm2PjrBe1yddrekb8bYJ4H6HnXG9G65/F6rgMZJ5k5MsDcCNAVbyoSbvqTGT7quw1wZwXVSCxE0wjYcnyEVyL0XAdJGmO/7SBsDY8A9x5lYKM%2bHvpsFbe8eCwa7LUXBbiyE2OpbuHiXozTcw4u7MZYb6obne%2b2qoup%2bYg/%2bfdifyTAm/zh8jASXbqpiMqBGl0dorBWRHhpAHsxwPw4xKXDGIVltdNik4TbIzgLgdx9Iaa3Btiivp1tkwtUOUuMKvSzqJdqXNWo5t5LVDI3EI2kx1Rk5XnyvPk33XSGs0UstkZ4/h0FscY8jIBSJxSXGs74YlmZAAtF4HJf/ZwG8ezP63Efj1llzDZdBDstaQ%2bOwZ2ZOk5HAzSaHnyXTlopDpsu7robl//V%2bBPf8vM//LL7r2cdOe49x623T/dYX7bPGR/3NFq5yynH6LQOBbjLfdM7QgXaLQSW8nPXETskWWVV2kOWBdDG4x5GKGOuNMbKfA1JGKE9KMBLExzMJ5g7IDtgozjvYFQgcP/KFWD6vp/468X3vuu9d77/z/71nxc8NSm78aEkaDUdVUypaxHEHyJVIqus3UcFeiAfICo0EbcPT2BnzWeebCNpxkLWKWSTPXH8UHtrrcnVBL5UR5QJX824ma5Zu4OYHbwJGxuLPb49O/McW5IH4ubCpq0mTYXJaTZeAAtdU4qTRFsjq5nWmed9qzMJiQlP6u1gXh9uziV775SdogB847wz5V1/rcqgGa45Ibl32npxel2bZgGN1CXPypqoCMEgEz/zk5vRFvP6qGc2SZxm9WNf6IvkQT1E8qGPI9IWs0H8so3%2bp3/gvNabR8lGyw0mUj%2bdMzCSHvaXLBqRRSYmGwFzbEm65c3MVh/l%2bkRtvUiQygrU0x3H1ExRzHp%2b/E3O1CTQilaT7iysS6GlLsoJRkdI9FfKJkG3kRxTS4WOA8omcmmwCO0CaRbA5FNh2FlkBonSsve1hCbHsktE1CbTTlvbBio4QDdtogwmpyrIQPkMwVwFO%2bjjaFJqHkQLDrNtzNYtfOhzMf7w3Tbu%2bas%2bvHVVE2A18oF6KMA9HiuGfWNPkTssNHpqVrHwZNwZzX3MdfGszUiA%2bwsc4D5WQjQTIt0hNkIUTqmaGKPHxyicZbUYYPREiMIZT9p69IR6Xl4/pbTCT3pcA8yTmDaaeCM9ygatPhcpOkY5zbrSw9fXxXRa6dvPeHj8ASapKt07/dzXFn20%2bwlmqhq4N0NaHaO2HKCIGF5BAfd6GGFQcvGfPxrjd1/i4uYzEU6vWbiypxlXfSHsQyKV0QCVETmxh5QE7kSqrCp71lg02wLq5TVLZDQE8fKgW4ffRXtckk2pYaxFjqJHrGl%2bk%2biYJS1p4kaiZNrRhJsTA6anZTXXw65nkqXc/Znee05WUKVhz5JSc4BeKsOSaaf1I4st5Totf%2bW/zihVspihcpKhs0wekKnIQYxq1RHHpEqF1p5ki22pT8FQSxrZ2PZ8jDTjboD7uDVGb6CkMt1ugJ6Vor8fY3fDw/kzXaRzJdTu8BAPiHWUk5Z5yBR0dJEQELvAGjDLAcaXyYQHrF%2bqXFw0SRdtDlFYCRBuDoUxj7b1gpqk8AjOOea2hhluy/I69CaBbbJdVN7t0jVkQzDClUJB9Ov8Hr62XSpkG34C5%2bXxCJcLBSwNRtn0ydMyUWf2JWrneSy%2bnyvgRa%2bA%2buEAnufgm59XwChMpVJqb3uExQY3QBOQzqJM/Hu%2bCGz2gHnt9c5z5OaAtFUqEm3%2bTiU%2bUG86IpVZjweo1T15H8emv%2bji3O8DP3jhg6/e2xx%2b6l1v/M6nxbo/Y4D7J97xw2/5kwvpncPH4/nOIWUgqmyu7ASphy2oYkxkX6htD0ctjG2y7ZMeKCEqy8J2r42aV0PgRDi/WoFthVKAKQkt9EaeVMnbq9goOQ5uudPeetU3vednH/3Qq78iBZju%2br7/vpjMrv3gR37za3/1sw%2bPEcYJ/LiNgu%2biZzdkcq75CrTvjxqYKRxgf9TETEHJYcgsy8TATHfNsucXDWHknQaKsQH%2bk521tA%2blSNo/2zCs/LyABgFtyoKP1L7RMbOJFUOo/CYNsOPnmJzHkKkqzKIKtBAUkDFggh6BfN5V43odMMjYn1TFc1rawr9Fe6erW8ryoQtf8PdpeY6R2ewcJKhpe8PphZdtRUZSGM9pbf8UW2E%2bm08KzC/Eivl2VKJdbsLUNTqeRPeZzY0JCfI8JNkx1VGW/AycG%2bECmEzCqN5YUTbBCdJ4oJt7bfTpRjqR/S2OLwoMGradn%2bHm7UbY6OPRzNFnzVr3JIXPNP15JLHCzPqqL6sS5Oo58/uRRekrAOKlj2kZjYyfnI7c6IgMQCbg75hNr%2b4LorXX10wcnrnemOPImFIbKrkXOTceAUP8%2bxh9er61laRHPaM2GioCYHILJk0%2bYdFNVxVHKh3mV8fI5zHY2j2DV5pooK4SVjlfGW2wOPbQb5%2bAPWXgGyiCjjKz8jm1rTge7RK4c0Pz/k%2bleP89Fj70iSEK/QHSm4pIZlzRuLtzFqKQvtVTicyM2FHbSv3wVaDgAF8iQKB0RpxjbIQE66d9jC9F8E%2b5GG%2bE8FeVLeb4cgR/hY4GwHgjUs/nH9Ku5rw15JsCRdOXZdwrOEedJI0juG%2bsOdh7THm/ixaXAIP%2b7TGwvOYhGscauKdYW/QEuDcrFpZXueF2UIgilK0YpaUiCkGqgPswQrfs4c/uG%2bF7b7bx8rkIN99Uwn5PF5zKXRvPU2QxfUf83Okkw/mcV8v5JBWZTE3xs5KDZIsrDeVggvdGLcndoi95tZhk9RDUeLFQ9XvojMum5iqqfh/tIRMcON9py0WdGCse6lr6YqqUGhcvmfd05VLpRVPdiG0s8tkTklkzaczUpGWm1vxaIsmovDazu%2bVnjgHtfJ2RiLThw26NJ3lVue%2bQj0m%2bvprX%2b70EvgeMExsdMu6EztcA7n0B7kCv7YKM%2b%2bAwxsGVAuaXRjgoAre9vIyY83%2bsXLXMruFIsTadp0Nb0NWmi439CGszLkaXh3CXApGx%2bKsBwitDFFYDbOxFWI4jAfoSR5Aun2KrUMDyaIyrRR%2brgxE2BXyrB28H9e%2bmoQzpSl06mferQQFLY8XAbxYLKG32svbS9XhliA0XKvC2exjOl7EwHiG1mIOXYp%2bqBdOu%2br7wO1l1ea/i47sXuJjZoN3%2bYHck0Qg5Ly17mS/RllKx6GZTI/0oBVgcVTCoXkfqvQF2KxVxlnE9G2PHwfqSL%2bdL4H5%2bxcV3fdrC4z/3ez94Zsn/wNMtxPSMAO70NP%2bG/%2b2Vv32TE33XsFRBp9VGpWCBOQ58lJSsSgF3WRBYSU9NkmW5Y6lIaAjoBxF3R3w9RckeYXWhIYx7rxagP47RQwL/CnDFSdGY8fHKF9g7P/cL9//a3a%2b78z9Njdsvy5/Pues3Fn/mZ/7BW17zzSt3EbjT/pKg3QvVYscOEqc2fF1AJiODNGhX160eEw4tlXB2KTkUpw1ZmAepuEWo1pk8ZJIbKR/7/CO/mBuAMHldHSFLwNPAgYCQmyul0U1EW6uy5xX4UGG3yWJ2I2FLOW/DbOcSR6U/XKOqJy%2bW5eTzVT/5melkUrWJUecmmjY92RuG2yQOiquKrvjJmchIU4wMJb9IGK9zHtUU8zHVOM37CjqpXndfHaDUCwE/qKuDDofsF8rKUT0stIfUM7tZNUsjiTESJn5c6ZvVfTcM/MQDPTtUzh5RMQnKolFP8Pptx0VH/i6D4kkMuWEXc/SJLJJ5EG6%2bUDM/BOdkfaVFtO/zNHDPAHzuOsz7Tb868Tr%2bJwB9k8R3rcnXhGRlPT3mjTLizMDVbTJ9znlmfQIAs%2byH675Vk6hOgqFD28ZDVIu2MIRkWKmnN/eOHZTWjsrmUYN2fR%2bUjGby/VkSuMxraoAJpCvWgP4%2bUJxR0YLhDqziLHqDUEUKtKyIL6okXweeC3zgrxP814%2bHuHqvhWDUh32mhGEvwbMWHAz6CbyFE7A/nWI8ILykZDJfZCKfAyQbCQrnPISXxvBP%2bRgRmK%2b7GF8kQHcwpnPNaQJ5Deiz5xWYF1C/OnmdbD1vpU/Gfnqyu1E5DdcBgnfq3R9TeveMdad/ewgsrtoiARDmb9ETKSMZd/FyJ%2bOexChbCUoLRXgB0CTrPo7QLXm478IIzx6XcMdzI3zdWQuDsaqyOd0VDeFKNjxNSNJMyIfWwEG9GEvOA7de9UxGQ9a9hXaqI%2bMEoCSktDf4ZEgLZM36KXXJap1RTxmwbv42G3LDgpsPGq250aRnri/6DcYqUvW/yXH5t3mvMTngc1INNadhN7KYa220%2bDnDtLeKPpzWWK6X7SfWj9NkhD43IeCYp1J1QDtJ9lNuzDi2O90QVmxj5xjGnVKZzbSIURzB3QsFuI/aMQ42C0iGMYKVALd%2ba4qwp1Zg20qwtxNjft7JqprylDa3Yiwscv1Wa6DppsylOO7BMZ3aDhYJ0gMVjSLTTRBuficQJyzzt3oYL5fhb/UxXFTsik/gvVyBv9nLzDH0sqdkLhZT3FV9Bj4uO6oznBr3BEsMFspwt4ji1IPXEC3xO3oYL5ZR2OphtFSGt9nDICSrb%2bMl51ysLHpSE2u0H4pkhusvQTnBOiNzvN75slYp6HlXCjKJXSXr4cSYKSg5ER%2bRZWGQ2JjpdbGyQuCuEFUzTfErFz08%2bsf3/MuHP/PQ%2bx685599/viWvPazzwjgzkv4t29%2b/O70/OkX3zyIVyiV4Z3LGHcN4soa9PQlkddCNO7B9lUBpgkQZfladfNL7hjrC3XJpO8NIwySFFd3Yni%2bBTu1sdB08cLnOjs//%2b/u/bW7f/WFX3bgftcPf2jxxXc48//hx7/uXY9cTM92%2brRCSlEIfAHufYfJWqrYkk3fdnmoTchB2EA5Zbvkgbt%2bh52KdzFT2Angk%2b6hsON9py4lx8mWtum5rTXOZJkMm94zxTf0DlMGg/6KkvayNgVYlPwlRZmbilx4XrGN5lxU6J87crLZyk5Ql64v2dedKJTv1obUmq4ieT0DIi99MROvSoJTHtZHgLmeCYy/tUn8y6p9yu0w7a9GtywmGqsY3b85L8kN8CfpfUw%2b5gSqqh7GiB2VcE0wIz7yetNBrSP/R0kQF29u7Lgw%2bimlVLLlkB1Tu5fKNagSRJboqFkltMtScZollw2v9jvnc9R4563%2buLnjNRzH2P5dNOxPWqe0G4mAarMw6zC80bKaYklsYS7WDNNru37UAuVeQeCQZ4wIKpk0R8aNgN5sNvheTQaJrR0fXEClXejCpK3cxB40t1EwxzYrww3irWO75PVo559uW4tmP8tBIKhuIqJf%2bnWqtk0UTtxcxEPbeN9PLkX07EfC/KrDG8BPYGO078cDFN2KQQP24ECxE8UG0N8T8K6KYeULc0VHtO4lVil0gI/9LfCf/3KEjbf1UTrrwE4SDOcDrI59OPUQzryFlBSknaJ/ASidURviwYYC7k/o5EMe6/yui0uriYBzw556qy5CgnFh3ad%2bXlTe7J4B9vmfF0LFyqvpGuML6rMiq3lsjMIZ/doNdibjekHmnRMnGT2Ry4TA0rqH4SiViO1N%2byMc3lTBoBdjtqqqp67MhvCjGGU7QbBQxGoaIq4r/2rPtXD/xRBxZ4QfeEkZL123wDU1OiExScCa9siuBmTgjWRGb56N4wrXl4Re8JTl6P6jWXkpBKSKyB59aPtISmvKQaJ80vW8Ol2gyejY%2bbow33oqNjaSBuCb8cz3EYCbTXI2T%2bfOwGwC8lE6qdehgbvMF9q/XeQx16iYTOJG5ixbtQ83vnxwfqKLzPTYMIw788j6vQijZhHV7kg2Y2ynTieElVjY8ihPCTGwj2rcjwPuh1sF2LzvxQhz31pENAQO6x4aWyPsrgaYuToQIGpuxMKii82rIeYXbGxtx1hacAXMz88fY/8sLIMjEVx/Z4DxorrJBOEEzx5B82IVha0O4sWyyFa8nZ78TkB92Q0wN%2bfA2e7LijVeKaNwtYfLfglrsXqOD7YLATu15WpIpbjsFGWeXh4PkXDTrd97xSlibTyQhYI1sC9ZAVbSgbweh8DVShEvmwOWaP2dAOFBiINY3SPurQnexfpRA3jZwOhjz5ddbPYirB900FltilyGr8k/y8JSq4Otag131MZIHQeUPodxine1vPSPf%2bOh3/ymF%2bGDr/vRZ7/72EXhKZ58xgD3X/yDJ%2b7Gs0%2b9%2bFwrXum32tIwDJGymcSGzadmTLHqvalKqqKXC%2bnjBDh%2bFcNhB55XFsb91HwNlxxbCri0bRfJ/gieq5yI55ouXnCns/NvfvErBNy/778vzq3VX/iGX/rWP3v0iRBxolwfCMz8aA99axZBvA9U5uCMCNKUETLZX9tKMRTry0nnVuH1VBWnKTeR9g7AypYsWZ4xV2JFZ4nsg%2bBAgGImg%2bGGZpJ4aKok5oEdR5PpyKYoTb4qJUPofLAsOSUAZOqE9WWiq9jj5dPTFLvNAz7VGmZAgVlLRAuuJXXHMZRPVRF0AlAUYOcjS/jTrLtMGtrPWlXtVI47/D83OGYDYyp/igxIe5ybzQCTOvMLFC0%2bOYEUCty%2bp4iG1IeW4NGe1FR2UkuVgPS46qIUAy0LqMaA71Ofq%2b67z7CS%2bMvaKCQt8b4V1JHVBFJsJcE7gVC2obKU57lJ1pXJUHclw9rmrRGvZ6KZsLTq3U%2baaHJPGDDNzxjwLZ/R9muTwkeTEDQXYVlUc6CcGlsCB8MCZsfg%2b8gM6/6hEifVZ7lgclPJ6zWyDXHx0asEn%2bc5SeSImwVuLDRTJnfFrCa5DvtUffd62m/6Pf/zohtHGXcdFJbxZjYHGnKrgWjrBOX8BigHVITNzAH36fuejRkyh9MaXukXrE/RBAYHSmIgVpAEaZa2F9XSO5s6%2bIa8zkCYSPp474pK4170Lfz5pxL89qdCXHjnEIg8VE5FGM8GCHsJzi84GA1S%2bEuqZfuXU1RPA71Lqgw7HS3oruJbZNxtJJsxgtMuQrLoBqivuSKXkbFGpv2C%2bt3sgfx1D%2bMLIQjwycpT306ATzDPiTy8GMPTlo7C2hswLxq5qTt%2bnZ2ITDvnBSYp1rTDDAE8lQdLZP25eaG2f8ET4G4Y95WZEEEco2Qn8BeKWEOEiABuHKFf8vCFjRD2YIxvfW6Ab7zJERDTHT2ZcZcoYjdCteLKe/iP44PgvaHtIo1ignMJi62xQFMrqWUFnOTitdbg%2bMtWvtrZPKB15fnqqmZzb1rRzF/Gdcaw7kZGYwA2xzSPY2p68PNZpelc1E452ihrYdlI6nPIH1e6wjHMuXlKpmJLFbFqcC7RY4pgnn9TOpN/qIRUrXEn207waWvGPVGMOztfGEbYPPQxmgLu/V6IsW1pqYyFUTsCgTsXoEYlwtw3l2VscLPn0GEqSZA6ylFlYdbF5nYk%2bGNh3sX2TpT95DnOz9qIYrVeZ%2bstbbU3exivktEeIFwowt3uIVkqY2snwuK8C3tzgGSpiK3dCGvRGOFyGXv7TNxXV746HuIJv4i1eNIYCpiXsJ4OcMlRm4G1ZIDLtvp9NRli0yJrS0ZcseJcl1fiIa46Adb4OVsBe773kh1gJRlgIw1QavXxvNvKWGjYSg5zEILmaCzAyGs3%2bnbWODARByO3ku/hnhkOZklWJkB9v4u9mQqae31szlYQWCnOOUN4ZQ%2buzu6%2be99NP/e%2bjTctentv/y8//fz/tYH7v/%2bDJ%2b5%2b8Z2nbtnejW/rtjqwHRvRuCuMekaxmV5v22IBSUeZKOzB98vYG3XhJQ2E9iHqloMRipgNRlifq6FX9HC1HSLwlMZxHy76u5EA97ue7%2bBf/Py9//IrwbivPf837/iRH3vBy370h17y2499/hCJVxb7R6s8p/3bOXHQ6mkfQdHGyG3Cjw6f5M8uIJSsEsFYpYli3Mrmg4FTRylpq0TEoo2BUxMGvlr2Mo1sNvnlsu8lAUjC1EflEnxv3olDNlH5qpS5kvN5hwsJcWvNfN6RJu9Cc621SzmoTLThAqJ0gqhUAs1p2bJuoTX8/Nto681rikVXs4fS4bsqbGqs%2b/RPVvvku6Q4kJb/ZJplXRV0UnhI%2bXZPEghZxjoVaZdo7j0bxQLZjRi9bopWr4CPjwvYk3mMHr9qU0DV6IoH9OcLmA9jNDSjQNhQoZVbzeFmnzl4ljFZ42v2Th8sZEitX5AcIijrinCWlUkWlK84NZQWBowdim8yN1eTCTkPhPNteUSkmFMhmMUrL1VhghqZJS5S5qc5lvydA8e8ZjLlhlk3f5OJ5/P82wB2HiP/Oxd389n8ImjYNsPY8TVh4jSAl%2bd1nzHPm71F/vjm%2b3gdvD15EG%2b%2bz4D5a7Eiea1tfrE/yW3pJMb9qdh6Fc/Jowk1qhihMaCdUbii%2bLADQ7ch1ZXN7yya1OkptxixmDTJp8cBFB3s4Q%2bRLOloBdl4teGd3BHz3T3UUYH6PrrIcNmll3sazMAa7kiSqroGFVthW%2bUjL%2bwkjApxHP35pxO87Y99fOb%2bHSAuoLoeIZ4pYdSPcPOig%2bEwQURy5xTQ3VC7SeYzkWF/NAXucIEHia6ushhfrtloCXnaw/hiqBLnJFQz%2bemc8TB%2bbCxRXj4IXo8Ae9Xg2QaAfwozn2PiRxciFE4T4OtZ75gNYb4/m9/JBDZOu9h9JFIOMzE10MDNUYK9ZeWWcW6nj/a5CgZ9euE7WFqO4DoODgYWbi4N4C2UsIoISV0l1zrtEI%2bGFq48Psb//twKvvarEvFzPw648zwMOymXqQszcQy0B45USxVcrs0IVLPRNpSbFaWDP0hqaAT6ukmyHce857TpRpM%2bPfazcaf7maxZOpGQT4nTko7mGWtdioWYXAAAIABJREFUVXtB3c8sKqcb12jbCeR5z837%2bHs%2bKTVvBXkc456B9UDN%2byIx03OhJKXquTafCG7mBJUXZYtcRuwomUsRMfqRyoaJo3gUxtg%2bLGAkVaInrjJX0xKKwzZ6XU%2bkMsPDCK2dAlw7RrgHLLyaBJqPfVYMvslH/6EhlpoKTmUEmi40JJajeTce3iPKR%2bYc7O1q4G3Gt54HTB/Nkk1zw0ZPtULOMMLvXR0gWi7qwkaZx5Dyuc8RSe7WENFyAGdrhGQ5gLs5RLwQwNnmzyJmLm9gZ/UUVqIBrjhkZAB7a4B0pQTnSh%2bh/hmvlGBf6GGv5uP5Z13cPu%2bKJGZnc4SW50pNhwUrUsmnUqleuczMaItInhNPbXYX2JqzULo0QGctkDaZCTzsDhMs7bWxNd/Ei6pDgHJnR13XJ1su/uTd%2bx%2bo9DY/8pZfes7TUnI8Yxj3X37Dva%2b/86XPe9XhTnxbe38bqZXC8Soou4l4tmd9RktkXMla1xZicudtYd2pmaN0YJAQuIe4aaWEPaeArU5I6R8ObRejnVBWh6804/5Dv/jxb//6b/uq7/2G5xZ/4NL9Bwi8EAnt30qzKISHajDpCbDvzCh/dumZliReqtL1qqdzAaZ0hlp2wwArAEkgqXXOevHJdKeWSjIUVpbJhrkCN4qdPWqVlwcqZh3j4qwIpAmFZEButvCQ0TcFXo4kbqkiM3ny6SQgcxzYMZMBf3aHuhhQTqYijC4nzUD1AcMWCHS1TeKtKSCkFpKjjiCqbfgw7ivSdrlRZKIO8h7xPlfygjwQpRdvvexi3I/w13sVXN5LseHaaHVjXAxcPDcZq3BbDCw1HTxBJK9oBCzULDDBnp7U/DnjANVZF6MYOFMEvLqTirNEARaz%2bNsdVVhHmmFvgNliB6US%2bXxLolbKe11JdDitDO0mZgvc2E2A1kTMk4OBsnGaJH7KRKajJZJ4RYBuCpTk2GzTB4wOne8zDHgeEEmUzEzaeuJW7L9mznMe4Vm/0oA%2bv%2bkgm04JjDmWfJ52hfo4J20AjP%2b4HNtsFKjlzm1QTOVI3v68KzVZfz5MsSDZrGj2UbyuWX5dAwizKGW6%2bxNAy3Ggbfo5c3fMhpd/990mStGBQgyJsm40IF2Cx4KgVR%2bQjaqulKqeStAb2pmUSKJnevGeXjjURlrdcyObyUdKpt1pDHAXL2rQWUaBd47MrriCKYkYCQhHdH4mf0lFRriBMNG8oGBLxeuP3JviD//UxX33s3BTAY3TMcJBitEwxcpyDV59LNEt6lZ5PjKHkG0ng%2b4AD6U2rCsximdc8cUW8K6bJwPqx2xY5ObnS6nqsWr6s0PQ/0SYserC4D%2bhmHzRzS%2bpD4sm/pSn3WiuTwcvPtsE73SX%2bZJylyHI4NxwU5zggFUqhzHW5j30uzEaVRdzyyF8y0U5HaFkp8K4r9gR0pry3e6OUzy0FSPdH%2bM7zhfxiucA9aqNNpOkn6Ijcowqj3cizBbaCQ0iYp3EqpJZZTzq41DaVwuUmI/RLD44Rq4n32liE6k2iZlvuparGFA%2bLXMx0pb8BiDPHJv3511pDAkhawL7uAbzpjlO0qjzdUWkQeSqUik1GovTDseKYdvzjjJ5pp2ySCPh5PM0n6ADkrDdSYpuj3KoGFuHBWHXDXCPtMa9SB/3XgE9x8bocIz2jg/PSxC3gfTv2Tg362CvpWRKK1XgUlcvNUxwrinAynXkyJqsN1Hzsy62tyKJfmXjW1unmlwk0z48hkylZOhzfYjPe9tjXCoF8tpCFQLC%2bXmOikjLbQjYL5cDLFYU0nB3mdCY4nKliFPdIS5WA6z0RghnC/C2htgoB1jRFQtP6rOjuaLUxbizmuCWeRujKEU/BLb2Y5HOEZoU5gtI4hRzToyQ2IZE2CUAK1oSQzDPCYSOOVddpEsRKheHaK%2bWJTG4sdXC4rwvzjJBUUniHh26%2bK0PdD5XuPjwW9/2NCXYTzUOr2e9%2bIq8h8D99pc%2b71WdHcW4KxmWJQWXqBCoFiA6PFunR3voIrRqiMYdsYGk3t33K8IsbvXaqLoVNIMQ51dL2N/3sFmI0XVcJDsjWB6XDFuA%2b0ue5%2bz8q1%2b479fu/tXnPa2d0Y00zuve9MkfKTRu%2bwf/5O%2bV73rkMo2c1DUWChYKIVnzFAOrIc/XCm0M%2b0dqhssEIUmoEf3cVSa6ql6oHiIAKjcR9xiWnuxq2Qkq1D6f4Md90jUIU54BWbX4GBmN0UYzAZUPMuyKclPnc8QFgxp7LgoMhzJhVmvMRVYyzTwdt3DqE1S%2b4uoNk2/SOstcURjuoqlj5pvyxWLUdkO3jE1eaDJhTQ%2bUaXbnuDaSDQw/KKyOjbm6LQUzuuMSHt1y8J5%2bivueSETeVSADn1v/Caw5Oa82YlkICSIe3nZxqhFJUs1MoELg1YYjRbdmyxYaAVDjtc274Pw2P%2b%2bklRBWkQCabdplYbIU9vYApYqDRqGDhBsW7d3NnYJXnkVIDbS%2bfnXdzI1oaiZ2Uh3TtHO%2bmImZmNmuAuKMTj3HbptNDG9tHkCL/3dxUqiHwM/IV7IFQCI/E3AoxyA4177ledB%2bvWNPbUpzUhr9vbx2AQdGkqM19ASmfAi7qK8rY%2b2MxpX3gWBCu0wYaQ8/Zywd%2bbvZ4JgNjGgotcOF6cNZYrQGzdmIzhed0X7qCpRPMew25SZ6s6ATDAeecpai9zqTdyXRj5tAbTdp7q0ZSOJqoSNZ%2bfuSJaWaBFntIW9WZ9kUTw2ejE0U28c6yjnGnQC%2bZ1VRTQ/kNU7nA%2bmfGryrAJEcngwk24KsY71i4cP3pXjfxy186J00HfdheyyiF2I8SBHN%2bVga%2byjMRQJ4zIOz1mM2cG7XxYUoRHFd6diPMO7X25FOep/s6lI4dKZ5XNnaZUgo0ex7PsGVkpzHQkmEnVS70Qc/JgyZad1XHEShko6SczmbJNhbLOD0/gjtM2Xx1a/VHNwW9tA/FaAchSjbMQoGuDcKsA9G2IwtfGbLw%2bmkh1edK%2bH5NyeYn6Hb0dEvzzPt5tJlc61zRIjoVKE21aeZh8KH5JLknstuh/QTJkKqOe/6HnTjYp7UJKn0pAgWx1beutFswo3MJnOj0dEivj8foZvWtU9vFI47XyMd46URrIv9owbtUh31mI2wYtmVBJY2kHn2neOB8z610hlwj2LstAOMROka47DNqPwQW0kR/SSCfxBh/zBE4rlob7kolIHLnx7j2d9tI10NkIxzmad66mDzM9fKuyXA8IEhVhqqsJDpt3J7zDDKkyzUt1vA1U5OHynA38Zab4CNUhFrtQRXW%2brjyw0blzrAckVtQBfSEbbdANsDtZmOL/fgrJax0lXAXX6yg%2bmq0qu9ITarAeJttZNyFsqSF7jYH4C%2bOy5SXKqUsN4dYqMUYL3bx4VKCStcMFKV3B6tl/D3V1KkZQ9EWdsPDcFcWl4jc0SK8wW59rnNCLFymUW6AuAik1DV7wTzyTLQOHCBBXGAx/iqi%2bFihEXfw7o9gF/04XsWblry8II3pZdv61z%2bQOuBj/3rd73xH92wJeQzCrjf9tLnvSo8SG7b3WsJwGIyKnEhpV4C3LkJcyQQJ2OIMhmCdtXBVC/L%2b7gbxv2x2EM4iqWAwXhzLPICf94X3uebXuzi2//51f9672%2bt/MT1TSRP712slvorP3X7P51ZPfdDQRifpYaaJ1KI95GUFlAI98XGkXEsXnvN72AwUImpZNdZXEkttipLfCdqYEGYU%2bqsLRyM6iilB1k5992wjiA6gFueQdS//mS1k67ONHGmjeZ5CshS94IbCLGDNNITDfiPMNRZwRlLiv4YvXJe1pJpxXUiLa0rCfDNIzeXqAJBZdUbDFvIUTetwTcTo9lsqPOdSIKeKjHwOLmCaY9iYEu1Oy5ye20PD2562HJTfHI7waOhi/YDsTAoa80%2bkojZ6Zx7FUPeqLkYjhWPqvGKMCDL3hi9mTLokLVWi2TyqfspynUHh/1UdKS3VgCv4WKtADhVJ62FynKX/7iYJp6NRneA0PZQSA8RJZb0hcEwQkBpFbWR7gzK0R4G7iyKEUvRK9AuhXa4UArQVsmKRm%2bcRV6ozyRDnZthZOHMAfOpuf9I18oz29N9znzHSX3RMFz5PiFgmE/oA2cCEg0gzCbixI1CLgLBw0yz/yYBThJg9YUJM6zB%2bxHgrv2vBeBoYMvTYvXJzBFHg3pxxNFRNtX3NVOn35uBes1Wc5XPs2NHlDK5N6sCTRPfKd4n4xJDtlPYdx3SN5sKAe5TK4ZySlLnZKQ0pgCTYcTNfcjanxHBobKXHfYjREFTGHc%2bF5dm4fd30MYMKsUU7nBXIo4DHf0zx1BymTSzsVuZdfGJx1y89d0RPvruA1iBL/KO8mKCuJdgvBBgJXbh1SMBCCxeIzCRbhvbLi5GI3G6KBJcX9TAPc%2bi38i0flJR0CkA75/1FJCnjEYns2bJrasinlVJsKddlcSa94SfArYEWTEJrFVu%2bIF%2bYuF8EmNnuYjTuwO4JcosHdhejHrBwvBUEeVojDIUcF91E/lcwUnwQMfC5tDDaK%2bDf3ZnBV99U4LZJgspmZoAqjGMx3gcs1OogcUIMedtMslG2maYbY596cNmMx%2boxD8%2b2PcbZQcxk1U9xdIfjW8ddwMUqw%2b/noH3E5NDOe/nwP10pVMePRvDuffl3WPylpPmd5lSrkEm8TVeb0NHH/l%2batmlxU743IRxd48Ad%2bmvZN2ZE%2bUqL3eu/yNil36Kq/0SYEVotR1sHAzhoIBBGsI5TLC/N0ZS8NDedFGsABc/N8b5VwPuepl2QUKtX60XsHKovNCzvT9lOVMRRUPOmLmLc%2bESfRQIegnYaa%2bqj0HiarU7xqVKoHKumLlqpAPUqveGuFgOsNQbIpxTO7u9gYXV0RBb5UCI2Jj2j0taEk1FxWYPp5ouLrVi2PMlmQPi3b5yQuPYXigj2u5htergCourbPVgL5aw1B3JeazQKpZzXJriEerpx3287NlFjIueRBkf3YkQtRKsVbSrjI6CmqRXtsfZyMLVZRcLVyOJDiVk4HWqSv3AxV4jQnPPQS8E/FULZ%2bYcNONQdO7nF12cvg/4%2br/c%2bN3Pvf8Dv/H5D924s8wzCrjf%2btLnvSo%2bSG7b3m0pzRm3dnrgMxRFxp1McwFtVTGV4QsWYPL06ieLJLXxPXDKmgtGOLdcwZ5bwGY7RAuOJCmJlilNUfIsfO8LvK2v/tErf/TZ/3v1ywrcF%2b/4f%2b74pf/4ytd%2b47fd9AOdRyOkwz0MbCaj7mngzuTUpnTsmteWHax4tlMjZhpBPNrrKBN4iTwhEaaXfvZMTBUHBa2LN3OGmv%2bvMfNMzZdPpamdgBpb7AaZZKaSXScrTX7CMiFKo42nz7U6H%2bU/TR94Vu1U1pEKHPBvhgTzUgqGvGhZKAsKZTJFs33TFohSyl21B63nONkc8Z/WDKrR8fNYR5Jwb2DhNudF0M4r8V2yLAV85FEP77nYxX7fwc6gg0a7iaKEiR3ltxwC9UVVwpwLGrWMq42hWE6pGKP4T0nCzEyNSUkphqGNuWVPPstFa6Ecoewk8KoOiq6Fm6uAV3NFI%2b9VnbSqATyBUGtooz7oo1hxUfFaGFpN9Km5gYNiuq82PM4MSvE%2bes48ivEBBl5TqmR2BzbKxQQDW9kDmkiHYdPzVn/TTUdAlwFS0y2kfsBRz3UBsRPdx%2bQwedCSc6PJ3q9lG3WGojXANWB2Wt6T93bPv2bcbfIhe543v4N9lZu/jInPRRUE5OrkVbaf2QiIHIgkj2bcjebXMNKSlJtnu42FIq9BM/2y6Od%2bzxHHiqo4BtjnG21oNyTXgcWSzIPHEJ90XUBJAIx2/Djisa43v0d06potNABfxp6WsUxHPvJjXkC3VYNLBxmkCIqW6Nt5Vs5gT64lKapEVJIx3F44dMbKSWZYFEz07nr6Wpxx8emHY7zpPQ4%2b9r4D4KoP93YLCe/HQoxxL0G4EGCNad9j8TCRJnAtCxeTEW4Pinh4NBJNLcGRiN%2bzx5GtkHo2/5R56/Tbrgng1WE4zimPod4908Ebhxoy7%2bINz3wa/Z26oJZ8ODcOOH/UVh1E40Q29zeliQA8Ave1/QG8EhBUfDjuGLO%2bg0sND2dLEYpphGCxhBUnkXUvcIF7NukkMsZMeYh/uNbAy58bCnDvjRJJluQGIOs/cg4O3HAbkfhtxplGmvIwVXxp0mTSVHrznC8mZpo0K7LEJ3IgXu6zjlQc2bNQpyECbHUeRrRmivDlbqJqMkbJNDCfBs751/IMvjlG/rmn0rWby%2bTp8bSZkCqSF%2bMio%2butTJ%2bfkA46kUIi5j0SI5q40a5HPO8otBHphN5WN8LGto%2bxfDjGYcfB/uU%2bhuUSBkkErxVhdy9C4jkKuFeBy/eP8azbLdgvLyEZ6ToJmwNsnq9jqTWC5QIbBy5ON9VGl93PsOz82sUKsN2dRE6EhSYWcSap7VkfkXunqKflKxdwZeUMVnsDXC4X1Lxlq8TOjFy1bcSbXXhLFSTbPbiLZUQCvsuId3oqik16Nk3gzfM5rWFMEzh8z6aygyTYT1kxiT1jnsdgzpeS4trzKgFnuNGFt1jEK8/aqKUpBhUHT%2bxEsNsRYs/GEpn3XH4GfydCYV85HVn4kpvgTKwSWwW4a0ZeJGzrQHnTRS1pYWmliErNFeAejEJ8h13Es/9k43c/86fv/sMHPvnjH5zuB0/19zMWuCvrR3X60sE5wcuCNJk9JwNTWZ8Iy8ZOYlkYjlOUnRjPPlXEnl1AfxiiMwY8O8V80cIotuF7Dr7tufbWr7/5C29%2b7Q/e8dqnasy/y%2bszz/61b9y5/6dec3Fof//OE0PpLNQgJ4mDpnso7GcwPoRPUCAVU5UIbEQJCFl38VfeFxaNIJmJq/OFFvZGdQTxgSxyQ7eJYnSgOfn82dqZL6oJ1T/da8kXkDFMudGBK629dQQQGzab10uZjJHWGM0tk0GlsBCT1ijN0dKfNFaymOn1U4oiEbSTBc4VGxIfcl2gJosE5NxUsknGbASPCfFfb5vI8QNKECxEwxi7bQ%2bv%2b1yCd7zbg1tN0PRsWSCZaMRr40LbqO/CdxZQmaWVptpY0K8/Tiw0xjvoFOePiAM5MfBzC9U%2bxhE3o0C9olyAZhY8AayzxQiBk8Ir2jg/42B51saKZuAbIaxtD2mym1r1bg%2bFsg0vUFXflHRGOSgrjGdLPgX9eUXrqSUtavARkLK9JxKG4xYjeU6DbPN6vjhSBmC7Cryb%2b5qXJBm2Of8aQaA5Tt4GUhhknchqLCINuOX35zcJ4hSjEyn5mvk7PxYEzGmyKB/GN8x73g5RzkOHBfidJmHWsNVqkzqR5phJ2ADmTNZi2peJsPo4xg3HMJqGjef1iGbWaGe1%2b41cK%2b%2bXTv6TcZFzr2DEhIA%2b1psvSf41ER59YiaCYEB7njkXMGJyGPT7zb0099m8v89oW8XBcMACQOpL4qAJp7%2bfAXDGl2LaQrK7DPfQt2cQ9XYQVOfQowCVbkolV9h5suXdoUI1a/M2vrCR4O3vdHD3u/eAXR/%2b7TaSMRD3LZQXYkSDFPFSIG5dZ%2b0CHhsNcb4Q4PF4pDTvXOANjXixD5wuAxt94FSA/gUHpdMxcGEAnC7K32X%2bzc3ZBRvlswl6j%2br3TDDI0eSHkyYQXQXVZ5IrtfDGteZx5Ugj4H3NwfhxrYvPV2TVKJbAPYyA6oolrOMwsXBTFGN7tYiVXQXcSxq4z2ngfrocoZQkCBYDLDlqK5NEET74mCsbl6rXw/cs1fHyO2nU4GDnMEappMiyoxp0zbgzH4H3T1tDSl6HTkY3UTJGdQS36yRW/hQHmkzX7gBhC3ahnpNYqXY%2b7CmNfH7DmjUp0S6Bvq/YerUxVm5rN/owe6NpVv5azPpx3yFRtCHQNJayuaTUTGI29cE8297rsUih3iRZNgZi26vIujBWri7DERn2GLudicadwD3uDrGFIlqP91CuetjdGyFxHJHKELhfeWCMyu1A8fkVzFiq3uflQxerdZqYAxcPXZwat3GpUIO17mDhoRasZcpQ1Nx2teJihRplvZkSG2JWpd/qw1mtIL7Sg7NcRrzVFfkKpSzWQiWb1/m3v0SQ3c1kmdkaLBOQmmwJxFMCc96ULNym3yl9X8dOlSHekc1sFlXVEVJnoYh4q5fl%2b/DUOWZ2S0V893oqjkuFuofLexE%2b88gINy874pkvxc2Ix1JghfaQesPNZFazZeSoPR87eMiJcS5WxRRj5hiRcV8Bzs0UMBsOYfsk6VL89oKfzt392Dve%2b/ZH3vHpd37LDRf3fEYDd9o%2bypShd2B0khmiLsBHbCGlkqq6ybyn8lxoIR73kFhlFN0Yz14vYlQooB8mIGHbGcXYlUJBNmoFGy/6ahc/9xuXf/etP73%2bf9zoBHAj7/%2bPv/fA67/z79/yCu8gedHBIUMHKYpFD%2b6YQJvDSl0IPejJqjf9lhQR4kDujyhDUY4vBO580ALyaD%2bfLiCt9PCiiXXsLNlGQv2mN%2baJ%2bOuwaMxfr7GOJHjOAIueQ6fD7dmANY404sMrsSxh3Q1DLpo/ep8bG0bQHUWx63nHmqMMvzqGSsI0pd5VmJ7fQWBaCbgh0Bctco6jibk3ch95jrSmm23a2Lhi482PAb/32QCH93TBgMmzby7IHCSpdzFQbyjAHtc7KCZ1dOIDlCwuPkA13EPHn0cv3Qf2GvKcXdiCnSyiN9pEobSEtXYbj/k1nKrvYTQCvNkqwjEtH1mC3kIjHeOgUkbFCrE4Y%2bPsrI3lJMH6ige76qTNENaXWFY7tuHtt7G87CME7VFzdCF3GLaLuKciOXw45YbUAJBCVCesaHmAx8/xb%2bM2kk8MZujYzLvGU93IM8TZgVZsGpAazanUAcglfIrtm2aK%2bV72MWHgNVtipDwG4PJ8BPwaP2nNZnMdMBsHk2yrGn7CsBsS4Hr7hQG%2b/E69zkkfYGiefxtJiWHhswnLfIFmKMWmUrtjiPxAbxAydxy%2brh0vjjhlEJw7CpybhFSynYZRF/14joV/qusyGlxpSymqNAn7y3FzGwPTB1SCnQIfhnmcrLIp4mAG3nBfKqeS9nZHu0gLysPdtlMB7QTsvYGSsbBv08bRsJGMQF3cS/HOjyZ4%2bx%2b56F3uwK7acBjCHhC4J4jDFPGQlSJTYF2vwGyyC31Y5ypwLvSANd3I1M0QvK%2bXMLhoo7IeKZnZRQelVTU2%2bhcdlNdj9C7aKK8nijWkROwRB6UzmqY8rjGvxcTn2Htxp9GJrNMSGsXA69h8oiwCa%2bsulh6LcHFJyWXIuL%2b0kYpNsldMNXAP0QhsjE8FKIUjVBNqeItY9NRJ7VsOPvf%2bAbbOeHhhJ8bLn1vE12rgTlcZuptw83UcwSMJyl31upENZH3ftIPlSMkaPsQ6UkeZTOVJ9TYbjpPgsOdgxm2hFddRKyn72pMcZ%2bRjOfZ9uvLqU/XpL8frWd/X8hjKZY5LRs1/t0TQbUuql7MdeY/3PB%2bl1kit9aGu8ks5ZZSK8UCcKlcZk5x62HVweGWA7jhEp%2bejXHGwtzNCTOC%2b46JAtvyhsdSpSb%2bOk7kvBbyELU4srAy7uFKqqA3xsItLQQ0rwzY2CjWsjtqyMWQ8%2b0pQwcqwg4uFKtbqCeLtgdgj5kGlzBXzZaS0heSFGtmfiZbJYqLmjwstF6erhLu5zVZKolVJnKcf5l185XLXwTo/e9w%2bTRMu%2bWCVdBcSB2GC3U6KO19Yxa1ejEbTw%2bX9CPc/OkIQ2FidUcSa6e9qW6367mLOYUZyAvQGgRFy%2bTtNsD52sD8Azj/LwYo9kgRVx7Hw5oqHygPpJ%2b77wBff8ZZ/f%2bPOMs9c4O4rEC42Y7oxk9RGuaAmMzrNKPBuoxokksAqN0tb342jFEUnxu2nitiyC6BRHsFbJwQCO8VW4mLeTXHrHR7e946Nt//i95/57i/H4DbHfOP7H/v9r3n%2bmZe7w%2bTsQWssCRYE7hE7LhnPcB9DZwb1ggLsanoDhh7tHVsiETLhdl4//x6MlHUhH9TBk22fJBnqF/TWfxpUmY49XSb%2b%2bpOGjm%2bta%2bnFzVrEG6iAtfEaZ7a8uX/qp4S7dMIc/zZ6XeM3Lno3SVyk/nqS4EPrSmHeNVNozlI2dhrAX2tQHAGj/HBuQ8M2LxcslArAg0%2b4%2bHefAx58xMPBw33cdkcBvsMCDDYajT3s7M6iXj%2bAa8/KIuf6Oxj051EsbcvP1UEXF8s1OP4O3GQe4XhbLFCJr/Y6TaQesHK1i63lCuwkRRRaqNX24DhzSEYpxmGK8ryDuWCAbj/F2WqMq34ZZ2sRYtcSBn6FDDwtUBtO2tqPrdC2Mb/bwcKShzYBjsYFtu0gos%2b25eUK%2bED/fniiWNMAPMOU591GJDdFa8AN8DPyEzZrPukz8wrXANG4SWSOMLIh05sCLUnJu8UYttqsB9wo8D7mE2OzsaM7RJ51V/NGFuDLJFrXGgvTibWS/DqVfGs%2bf5ysSNrCFK7R7PxxLi0GvE9bVuZHn9LXcwzkd%2bLXns2mAbiZb0zUhOdGKZJUTT1hwORBOyv9muuU4IW8qOhiKmC6dhNVa19ICMdS2vXEb8AZ76CbNEUmIySNZhwHQ0sAPKONh70AzWqI8TjF%2bz41xp%2b%2bLcDVz3ZgLdjwloGUrPvQQnkpQcKVl//ylPHpEnBBVzhbK8G61EPfInBJUV5LgEt99JKKfH95LUZ3w0EZXeBUEf0NB6X1GP0LNkrrSQbiCW4yeYvZrR3X5MeBePN%2bzW7yYwLi15QLDY8rv1P3LgmsBHEKvN%2baAheWLLGEvClNRaIxS7kcgXvJh%2bWHaPg2GkmM7pqLasp5IsCio%2bZESg7f98ExFhoWvOek%2bP6VEl56s3KVUURYIuCccplJ/58w7gR0igjNnby%2bbqme6rbRiRQrLkBHJ60aNxrTREYywnyaeiUB/SiYyySa%2bIxpPakPK1MDiiIyxt1Q/sd8JDMkuPZ4N87SAAAgAElEQVSQuOFXzTXIT7Ytx/M1XJlUQirlMcpJRo05tfBRKUD%2bhNIxVgkOIwXc2/0UcXIUuLe7Dq62R9gduFI1lfdqZ3uE2HXQ3fWkMPHml0ZYnCkgeVmCxKEeJAF2%2b0jmK9l1Cl9A7/GtrrIx49/bPaRzZY25Uqz2O9go1rBKAF%2bsYi3s4mKhgvV%2bF1dLFVi7rJ%2bjssgTVjOil3rYxaWWo6otL5SA7b6oC07XIlxsOYB%2bTiQxuk6Mwnl6/somHJUTtlqLcbVrqJ8nT0acOSq9LbSKi1irqH5HVHWlY2O5HOGwm%2bD2NU%2bqpy7PuALcH3wiFG9/Ydn7RVwIelht6KqylwMky0OZRuafCLF1hugxxdKmi2SdkjMbs1d3sLU4B3IYsx0bty8x39JDo%2b5K7s1HCy4%2b9Ud45MEHL7/3nv%2b2fsMy7Gc0cJfMYobux%2boGswiTWZx7oS3APRy1MGaaqWVYeBvMHe7ENVScCM9aruCwQEeVEO0xwMjUduqIRdiMm%2bLMeQ/v%2b8jhJ/7m7R/7rg%2b/9TtvOPv3ekY7E1N/9DXPf8vZZ62cm3fis9SsFQougmhfNMZBeAi7Pouwpdw%2bVBdWSalkzJmQa0ARPbjZCGSmXUlcVfIYPgja1e/GjYY69Iltn9msGhlBvjR8HsBLot9JGOAGmXnTPgT0xqFGQDQ948mSG1BubCO1lSSBPVsir51XE9ykxUWSQOY5B9z5qgHpebvLk5eAJ6cAmCRBJl/JOkLCUjPtfObiZgGveyDBPX/lIGkPccdtyuoqSm00G/vY359BvXqIJCGz1ACcfSTxDJb6PWwyg8rdB6IZjOJ9LByUsb/QxWF7Fp6dCKm0dNBDu6tkuA/UC3BZuCmxcMveCJU6sDlXkpLntcoOHGsR4TCFP%2bOgZPWwFiTwFwPYUYLlBRfrBVpO2mKFyta%2bMrZxa7eDWtPFiOE%2b0UBzw%2bAg6u1JY7iVWUTdfbgVyhgI3PkOtamQPpTTpRvdeMYsa/aYINSspVKY54SZSEmo1N0xfuDmXhnW3vydJYzmwKRsBvUx8u4w%2bcJNhsXPF14yWnJxlqAmX/suk6E3unl%2bb4bJnka/53WZ78mz1NJHNTMlybxaHzvtZKQkXxOAb9hnPme09lJ0ShLvEgwGOSPma0xMeSbLvM2MK5EmDZU7xkmgPRuCmhEnaM8%2br4lRsrep34QzPpB5moBdouOFGXjjfXSSmiSQiv6eAMxWnUolpVris%2by4lAqGGKMiYIZA/m/u6%2bKed0T4iw%2bmsNaU3tZehAD2NA/eebA8uGZYGyqDsIouejb1Wkywt1CxOuhaFdlglNOusPLdS0p3XiGQp2yG4F0z712C%2bNUEPS2n6T3uoHw2lr9FbmPGh2nokxj4/D0ychqte/fIxD8%2bhr%2bsgTtZ9xCorDoS/l98PIZ9RtkHzjJRvTAF3NMU3VUbVcSoskT9oitR2r1hgo%2b8L4VbDvHCMwXc9XwPX3e7pQpijVIMBpEAQdMXFROpNe6FBbk/zmgHcWEeCcXRmTZa9wpZelQDcLyScT/oO6gFiqSRV/WOIL/xF4exYRtJoa4SUl2TwDrdkZVkptysqaitnvBZOInr2vQ8cyPMfEYYHGM9edxwMpVSOWebZM3jlk1znZSS8fqrVSal6uJe%2bsDs25wneUwWYqJ1ISUXBKD7LeMqwwEUgcB9U4C7I8C9VHWxS%2bBuO%2bjtezjYHokWncH2W74V2GuqxB0SQ9g3PpekC/UmjPdMA%2bhkoQzQwYXznfl9TmfeEqSbC5xRz9k8HiW/qYWVaoxLHZXzJsWoZG%2bnon1is5hxI3Y2X7AvrNRSXGkb/1a1u6n2N9GrLKPU3UKntIhKdwu96qIA9G5F/d0t67/Li5ITW%2bkqyWmpt41ucQFrtRgbLZXk%2b5L1BHOniliuu%2bi3Izy4EWI4jrAw4yFMVPFD1lNZG5ZxIehirV9BtDSUc6azzPzGCNvrBcSxg/nLB4jPzkgvDy5tYmN%2bCa9wu7CLHhbnPNC%2b9osFFxcew5W/%2bcTl97/5p25czfHMAe5vvPf1t754kpwqlpjaso4sedWfaN%2bodR%2bN2ygUasISVAsTxl10qrAVCEpi3LJSQZvAfRAqtp1JfHaK7cjFDHurZWO4f/jF//e33/HKT77r//yyAPfnfMfvLP7qL3z3u1YrzRcFxRj9cYpC3AITdaTcvdMQjTF3jkcGvoSbKFWYhL0nQDXBWFtDcgAZP2cOdUpkjKZVwO9QrSXi4sKkTYY8yQ4SmJpFRssc8t62T0rmU2vdERb6GvjgyEsToKIsxBR4z%2bnS9bCedNgJvBApjNazc8NitMhiV8kKp2TvaTd5nb09H%2bKUk9SJgiLZyCVQ8iUytZXAQuBZkoTa6vv4vYcS/JffSuA0E9x5SwFhZKPW2MNeewbz233sLpQQRzYa1VbGavuFBkbhfsZOCLPIYmC9Bpb3u/CcVIDK3yQBbhsMcbFlgfyFy%2be5qHMCIXN5uiBl3W/eHyKoWbg6W0YySFGr7iCOFrG8PoLruCgMhygs%2bDjvxlhZLsCv2OJAsz8GknYi1d7KNUds5UJx8qSPs4V6WfkWieyCBWzKs4gGh1JEQyUImz4zsY00zW76KRf36eTMa/WTTEeuASwTa4slR1yljiu2lD%2bWYboFvBrmWls4mmJCJmSX6c45FnRVVSPdyRI1c2OCPXA6InWjMpqTrtuc97X67PS1yTnmIpAZsO8nIm1iEvFJsqYntZlxvsiQu7LGq1XVz%2bmNuwEf5u1mESZoL9E9ZshiMWrMMtxPFzBzrm004YYH2esE7yHzdThvJ3UBegTxvYGDajlEf2AJUB%2bMQiR2FeGgi2K5LKDmU5/v4r57fbz9DT3gNDfGQDoCnFUD3oHKEq30dB8085tgTFXLgECLIL4Wt9FCHXXwJ20zUikxb1BrzerKuOumVVRWIvQ2lGSmSwC/qqUzBozoibv3uI3S6QQGzGeyxCmQfqRf6N0hPeiNdIave2uuotmZyM6clwi4NQEeX3JwxorlJRo2MA8vA%2b5uiKZvY3gqQDUeoWzFqLgOlhY97OzH2E2Av/zjEVrPqeH754e463kFvOCmFLZnSWKqyDfEUYbMfyrjUMdCVEVbuqi0I1Qqrtg6KjmMKrRkFWriTJNFyEXn7iAdtoBCXaIDNbuFVLvEKBg/IU6yxFW5Z8ftdqSuvXpIKCq3eOUa9CjDbmyR1U6Z69uJzjTXuZhlESUjD9QbXeMmM30YAeWS/%2bGDuvYnjS02gQbufC0D7uNUki33DmLpz1cHtO2J0OkyCXWAC46PYDvEoevA740wdhz0Dj0cbI7huxaiNrDwCiBeVsDdbQ1wJQywVhxJ8z5cr%2bI8Qx0AHmlUcf6wk7Vowk61RfmLHg%2bsBcJXJaG0rzYC5lbQEYYyGo6F%2bRKwwwlEA/f5IrAzEOBukqAq/S30K8taV6Mc1tTDEtDdLy9Kewx22yjO1Y7eZmKh3TbKfF4NaQT9bfRLSygNttEvzqlIfG9XgH25dxnb1gJOnfFw3o%2bxUrfgND18%2bvMDyffg9zQqBUSxjhDxmKrIuRw7QoLVYRkpk3ndAVbrqpATe%2bfsno2w10fvdIDTMxbqlo0zxUgYt3bdw189CnzyozsfGN374R9811tvzBLyOqHMdfbYL%2bPbfvmN977%2bOV/zvFeNdpWrDBlCsRfKs176905oo%2bZDgXe/hs44EWBv3sufdOGg1u7UXBH%2bTIDLrRCdSAP3J4DNUw4WmdgiKdzxzmt/5Hfu2vr8v/j8l%2bMS6zf/2jd%2b5M9//A%2bssbVAlwNHF1aShA/pJyIMyb5atOniDkGmXU2EonHXDIOuci8LIV1ASuICooCLLJ2aRZWFkx3dsHJ5N4lceFeBaD0OdFU14f1ziYH6sErDrN1Ajp82T27BfAVWGXMamysATwBOVkhN2CJ5ySWf5qPRpoiUOUejt78elxgDQPjZI9U%2btTGR2dCIZjogeCAbBSwvOPjSBQtvusfFG94Twpmhnt2XnTrZdcpb5vZ62BVbK2Bxu4fN2SqatUPMHBTxiOdjXsKKapbmD8%2bL0WoDvgdc2Vdl2QnUuULyuYcSB8%2bxYzyQOKIDvM2K8EVaC5ANiYCbrQTxKEX7dIBkyDLoKVYWuOPfRhguYmllgOZ8gKUgwkLDxUoArM3awrp7%2byN4vouXLUXY6yeSST%2bZLJjM7CDqHoiulGFcviZyB5AtbaJiH%2boE4YktHN/DvvEkm8B8hd7p7nEMk80CLUyU47fONKjHP7lPmXC%2b6KJ7MYLAUZ7tGpiq6MuEteaRMhabJ6w7sTD0/B4tHyIoNiy8aO2197OJ%2bB2JzOvOabaaMg/lZt6/a0K4jL1jrDbzrSJ5P0xcv0Zb5d%2bfT56T2ceE8XN6dvN%2bs%2bYSfJDJk/FZsqes7BKkTEQdHshP5u70mMqjj8tPxYUmvNE%2bhpEiI/hc5FWR9vfhlZvitDXCLByb7GCC1iCQzfJ42IdrW/CDAA9ejPGpe4E/fH0LWHPgcs4j2z4GnDUlk2HCKgFzGtuorirPcAOgByijbrXRTpU0oIY22gLa%2bXtHVuRWUkXlVITuBjPMgXrSRkvAO2U0qrRrZVX9TqlN7/Jk7iagN/l05nUhR0yHyXcSfmken%2bpiSwa8861SvClOBLg/JwW%2btOJi/okI7oryxe73gXlKZci4V3xYU8C9aqWoeg6WF208shljbyPFRz8aIv6aGr6nMcQ3fLWPr71NdQCOH8O0yzgpu2LDaJ6j5zgjFLJZIqhn7pEePwp0T6SbZn5nBKvVd1AN1IW2Bo7krhD0m02wknipBIJkxDKfx7HtzNhsA0EdzqiFw6gmEtnJQ33/UYY9C9DLhm06ovV013puYA4HAElnEjvibqU3u9OAy0i/KI8h094Ti8ej3yy6d4k0KThigHs0UsB9MKR8KcXWiEkzoQD3wy2lcR/0fLRsB15nhHGOcee9wcCBf1ME/5wHBD4Odsdy7AgOVoIRrvR9LJfGuNwnmB/iUr%2bAldIIl/kzGAmLne2h5suw9gZob7dRXSRoVh2ZTHs2TxBrbHdQXKgeISClb%2bQmRK4n/d2OzmJOBYR3d1soztXlsGyLwUEHndoMqu0DZc07U0F3ry3HqczVBbzznvL8yjNVdHc7KM/z%2bZb87O7yvUqD5tRr8KMhzq94eM6KC6vu4TN/O8CVLSofbCzMAWOaP9Q87B2OMFsraL0%2bOfhUSb70Ra5sRbgw72JlJ8L4fCBOP8WHB2gsllBftXBHJUbqWrBcD3ePgI/eY31u403/12sevOfGsOUzBrh/x2s/%2bbO//BNf/U0PPGbdtcnG14z79OAiJz0OW/B9JqlK18nC2RwPZNV50QHHcaKAu9sMJDl1NI5xSFZDEixSJKmDkmcj6gP//J%2b87s6Dx/7tlwW4f/Nrv/iz7/vVW3/6wY14odUOUQhcCRDLggxLCqXwNzrLZH7tDt1ZtHUZEgwtsvIHcFhgiQyoSGmaSPr0brdQK9tZZTpx0NDuINIBsq3xpDU5QRxnecdOSmbe6HXNcTLGXh/CTII3qonP1i2RAUyx70xsmyScG4wk3yigUBeEMmz9UwH1PJtjrlyuJ1es6bhy90Z%2bIIxmycLqvIMP3Wvhd%2b6J8OHPOqD65VnnfZwLR7L7fsQJsLDXh%2bNMdL5qVqODjLoXrXYKeIqikcnZAi7tSd6Q9FVWcns4cXCbG%2bNBy8VNFyNcXmeiF7B%2bKcaF0w5OPRHj4rqFM08keHxNBaQpESBQudNJ8NmRjVvCBFvrBXQ7MZZqHoolC7fcPEbsu1gqpnjOuotlJtbCQeXKEHM1Fy%2bcj7BP8K4T%2b8lIKi937SQwONS1E3QVAV2m20hMpAhRbjEyk04GDkXXqXSz/EmGlg8CwXxYPj/WTbLSQGxGFUjgI29Xl/99wONWPXRZIZlWn7lj56Vf0/JZ0c7nnFb4HRwXpn%2bT5TaJoCbZ1ejj857r4viSc6/hMbkAGVb8OI2vGZfHjaGMlXsaEp1syOcBgsJFWeKouNNoeZB4tOvNvalYeoQV1J9VeSMWeE%2bOYw0ZeDc6d4J2AnhvrGpI0D%2bZTl9BeQajwQHYs8l2MVztWimGtIsc78EtzaI/HMB3U4SoYtzv6aQ9G7PNAFv7I1y5NMbP/3gINCw4De3PJkBdAXey71xtBbALiLdRXVZRPtmAXkphr5VQTTo5AN9BGzV5Tz1SQL1uk4lXzJ4C7zVU1iLg0gDdRAF/kdJs2KiQZaeEZi1B/9JRZr5LKc3pWFj40tmnkNIY8L5GRhsYPxrCX7OFXadNLK/pHKtREriPuVkHzp8GOq0URbrKFJTGvZ4m6K86oM9H3XVQOeXj4SfG2Hskwl%2b8N8HtrwD%2b8Ys83H5ngBetpJInYyQsZhxK%2b6XcpGlbZstRRFA3Us/pR7fLREtbNhLTD6OW4JpCxr1OM4JhCwdJDXUCb8oqRm0B4hPnmScDcnXciRyHFPRk7qbf%2byHgM8FfgXcB6rBQ9XvojFWo2NRauN7I7JOvZnIWMkfSm7567YRUjhPORSb/5DgJqnJPUvMFN9AE18MoRUh5GXHBKAXbeGdcAuwYra6Nw80huuMxhr0AbVYH7o4wthx09j1xlWltRnj8410sv9pH4VkVNCsOWrtj7HdiLMx6uQ2XhWp7F4fVedmMybKVdQBLQOtqMMSVfkFObjkYC5C%2bMvDldqwFY1waFrDOjcC4gOWA1eAtbI5cNLp7aNXmUe0qCabcPSvBYW0WjTYlmEC71kS9TYMO/WB1Y4cJpQmW6zrnQSctdytNlEkmiWQ2Rbs6g1rrAPuVJuodBfCzh5BFakMYjiL0/Sq%2bainCreeUbeMXNhNcerCHAp3uWHxpRnnEC9Gu/xNTQpMAs40Cdg5HmGkUMhAvEXAAS1dHCPwUzYUSRjMp7vAjVKouijUP790DHv/48JG3/9YbfuxLn/zJG7KEfMYA99f8mw99%2b8/%2b%2bCt/8gsPJ3cdHrTUApPPitK9ieoWpZniL9P0hd65hoqNKHsJ1ucKcOpFdMNE2Fzq3Anc9d2Ha9s01MCfvuUjr/7SfXufuv/D/2jr3Cvedgd6B/i6V99x%2btbz/tqob91UbjaLcw2ntrd/8PFf/08f%2bx%2b3POvU9vVq4v/DGz/7%2bp//oef%2bzEMXYymmwPERJPvou/PaQ3tOPLQNAy9djgwiF39zrmki4GWg9dxSlClRRZlMK1DuwEdmXSeOKk8uAS/v0WBlugVNmffpipf8TFZl8iQdsG5W0%2bmk/x9Dy%2bf17jKW9QcUqzhxgGEyaWcQS3nt66n6eixQN4VuGCXQmxlJujPVMnOygHzCoFyvD/E3fuSyje/5bzF2Dlz4jQTnz/hYH40QwsLBPgsspfB9C4f7wIONAHe2B7i/UcRzDwd4oFaU0PztgyE29sW8RbgpymJ4b5lr8ZDl4NxGjAtnHZy%2bHEuV1S%2bkwPNs4HO6/e5wgb%2bNgOZpF4ePRmiccbD2RIyN9Yl9m7Q3%2b/4IuG0c4spSAUtND/8fdW8CLdt5VgfuM9d853l4k4b3pGdJlizZRrZjsMExDs4SAdwJrXiBHUinYeGwDE4gJs3gJDSsLAIEs2JCbJopNA1tjGkwU8CWbYxky7Kk9yQ9vfnd%2bdatW3Odsdnf//91zy3dZ0kOdIdaS6q69c45dYZ/2P/%2b9re/za0Ei7d4qPoh7jxm4/ZFF2WLPvIpdiMbX1vqY2rWR0OsOdV5iUxKsImNFu0gdemvMmvPSc6F0inKo9M6xhc4juhJi%2bH3bpeSCrWQyb%2b4f7eXDsE2QTedSeT%2bawDOZ7BTV24lRZZaZz5HTy0AeDxOjKWyI44YZILNb3Abbp9fNJjFQ/6d%2b0%2bOM8Kjrmdo9yiN00woOSmOjk4ZIMgQOYGJeZlIjuljwgqZxUAOQB%2bS4eT7Sc673uRZHL5rub/y1VWPkLgblx95klq/PnTp1kDBLGYECOn8ARPBkEXW0GpXHYORnYPkuoOEPOYiiZxCy3lkaWmregv9UBc8o0aa3%2bkKkY4VY2DTHlJ5uff6ochkmi3F7NJZRmQErCLMiMIA2G7b%2bOffZyPZ3oc9ra1u2WTohrECJM8fsO8mOpWXBErQixUlr3ZhL6iHmVzvwVouaflMTY5lJDQGBI5lZOqrShd/LIZzqSNgnwmtHZZJl%2bRWiKSGAKW8AsXKLygfDf6ugHstpREQb8DuEcw7z91bciVu309SvIL3LANYiiEaAP6C0rgzJ9AraMZdJ6fSs7qz6KKGBLW5AqYQ4c8/k6DdsfG5T4V4w0MuvuWMi7tPZDhzIkC9xYqsI3JD/dzZb1utBGUuDAa7SIMp4SGl7wrgh0hnEl1tSQHngwsy1pC8P2TfuWA0IJHfHc6vGgHtrCh%2bJAM/0iN0Ao66zwfH%2bJtITBWpjFbtiP3lSEJqLoAgJ6mivHR2I4A/fN7mWHyOJlppgHvcz4QRpgnF9m6CzaiMQr%2bJ7bRyCLi3SAS1%2bwhtF61dD4UK0NyKcflzLdz3uknU76cEgfNOikaLz5jj8MGdmhynbzBQae2gUZnBWHNbAPdYcwt7tVmZE2qtLTT4Oc2w4IdYD30sFkK0d9pojk1hqrWLK8m4jKPF1h72q1MY6%2byiXZ1Ctb0H17VwIZ3AKXtPS1DU4Mr%2bvdVW/WOuKncDW61ExhEO5O3KFEptFgdUr/mqhYuM%2bEo%2blkrqnq7Sdc5GuzyGSquB/co4qiw6adlw7RTPdCewUh5gftHFmVnI3HejB1x/ri%2bWzmzIzB9h8%2bXxFueA62vAwpz628wHjECMX4%2bxsezi1GaIthWgddzF9LUBnNsD%2bLsWHjhJ4siV%2bgmPrpbw2K/3L/zJx/78Rx/9zZdnCfm3Crj/i%2b/%2bmvd86ZmbAXcLftbE9bkVTK5dg%2b9WddEaS/RT%2bZB5N1IJMGmc4s6VolSL2/GLaHciAWO0DZWGAWBCxPTA%2bc/9%2bf9y/50LVzkoPnlpf3XSTtCwXnF2ea5ZqzpTixfahQV2uqXJ3cfWnr7w6ZO3jV39mQ89/tgfv4h26U3/8KNzr3nLXR/84YePPfSsAPdYBn56ZrOzFJM6et6kcpZhYSWNFAS4a8adE6Ak8UkoPBUGyjDhrAbKi5dEVsprbPq8v1CjOkzs08yascQ3ul8zaZtVgGEnzDs7lkkiPAQ4cnIajgUEfIZ9NMVsbgY6hDkvfOXWjPnjGtAugFOD9FEfcVM8xgA0KZqTk1TI8TSwDHy6x9D6Efjtxzy858MZSrRat1I8OJNhkFqwHBvNRgQ/AJhXzAqpBN0GJF2vA6vTwBpzjpnARLCuwdIzcLF6I8b14y6OX41xY9XB6roasJ7WCi4e514HeFyTdHdbwOMR8EoH%2bEIMTK66aFyOcRe3iYC7AVxZUj7PZOPCXor5VRfNRoqpiovJYx5OrmQ4MQksjSkbLNY2OFNKcfdkgjb94hlaZNvT7USxrHJFEiVSwJ3yFSV3kFdhHOgrK0LzMhMU22mvR9BOaYUC2ypJSwFzBdIt%2bXcuSuUQGQG62t70B7Of2S6fKFvUxyZIP/iNFNMTNnb2uCjQv60riebbDc%2btWLSGRUh4qUcllar%2bpxLg8vaMph/mF7rGmpL3jn3RRKvyzknGhcJ40B9qy/k%2bpf9hlN0fStZyC3cB5mTSKU8g%2b2%2bqvA6TPrWsiYvWstL65hcppoiU0eQOoyEGB0m0yEKf8j2TS6afEH%2bbFa7zxUiFbRT3rxSZO4Gwuydti9WC%2bfwIJMicDVATT3enNIneQAH3VsdSkSkp%2bgJs7innE06k7TTET3478MxWBGtVMfdqFj%2bQnpB9dyijZUSKC96VDPVLFiaPJdhj4qmYN1sC3NO1HuzFIpKrPYwtJ2gmFS2hUZIAJachmFeixnHsYz9Vlq6GoiuvpuhcVf1k%2bJmFvFa0DzyTWcnEryptvLSby8qxRo5hcK6WXdG3nc4y4ZVYStbbZN0z4HYmrIcA3SjdBdVPadIxdJVxI9R8G7XTDjqtlObJWJ12ZGz69OcS7HccPPnkAGde5eLbX13Eq07GOLHoYafFQeZgQab6p4tWi8mqarLMMlUKkIy7aOFp39uJUSq7sPq7iP0pubaau49mzLrkOnlVe7q3KJNx9tGg/SMXspS8pDWMFynBUTIZm77iuhCXWoCztkRuVWNWQC/wmle3sep30QqrehZ9KVnBN5udbv492yUX6%2bMcDyhNy1kfSv6YtszkEQjWq1WSB0oqM5qUyuHO6NvNWEvg3gszhIMMRZ3YzfyE7Rxwr2vGPewEaDlA0BtgYCngvr8xQKHmSr7GRNlG/ZUObF0gsdmmqYUak6bHXWw1VJvm/8ZrutSjZpzpBFNtbaNTnZZJoLa/Jcy8YIlmHZ2xKenHtfYeOtUJNJqUllhYdZivJ5IHdCqT6G3tSjafJKdrYqRdnsQJex9brVQiDPyXVnkSlU5d8E27PIVqpz60YOUJt8sTqPQOQHy7OCmLhKmKg41Wgrmqhc2Wmuuk5VgWttuxJFEXkeK2xSqqq0XMLzjYWI%2bw/vwAe2kiifBLFUcWxOLPrjEA3%2bd2mFji4sYG5bI610zXZuFyY7zkoRdnKBUtrHZtnJ4PURtzpbjio3M%2bdh8ZrP3I95376d65e3/85bS0vzXA/dt%2b9NN/75%2b8665vuX7eeXiPvUISlnL6KZkgbAziJgKXHTPDxuy4gHjXrSHJMulIrdBGHO3Dc8fQHMS4bdJCpeYjKhbRHFA3GUu412alzszGeMlBUHXxXHvwtH2tjWsPTuHtY7hjgYVALCtrki3Sk9OtgLUPZPtZtnXdwu63PvgrP37r8doffDnm/eybfmruJ37i4d957a0TD1zZiMDwC1twIWbxkRlMBHXUIzLujVzhJG0NJat51QW67jiCmJKFAy2caNpFz24SwZTGVbzL824UuRajwLIecDQYybta5IvEmN0kiVW7YJgCMQLStf2dYRyNLMQ4aZj8oZerhX85DTwPFM194HfGg6ea9Z8AACAASURBVNqck0gDjKc3bSZHStwbXbQaxSwszdpix7W26%2bPBH8yQdiJU7/DwhqkExJqpbWG/EQtobzH3ylcadYJ0PiQORuJDrUETwcezcHHiOkG6i2NrsfK31RfwNDWsrmLa%2bfzItn9RDyCafACB%2bxf1XHQPQbz%2bzMFm4rhi4idWyJAqoTYBfK%2bTYnE1QGs/wXjJxsSKh1MrGWbpPhPQmcnCExsJvvduF2OuMhHeob48B8wOnofW%2bQhd2oBdmoJFTbO6SiPtPRTRlkTToirsRJCsAIG6agWyVbGd/Msw5txv9N9u1ja4jwH7BPmcMJlYx8VA/vckaqWZeI4v5jPtWdkvtvcSBEEefmp8ZoA7cx90O8onzpoFLrfm50ORBf0c2c/Yl0zRGtMmjUOMYeqHeRY6n8RsZ/qcLEz1K%2b9VL%2bejdamHqrRyzGABu1HJnLbZzMuCjCZ3%2bANGJqMjY8ZBZrhQpjaUScS0ErRVUqr8Fg%2bg5ODoSfE8tSCM3AlklF45tPpNMaBExlLa6O5gIH2GeR7Ntg2XC10WlmPV4L7qT5WyDfev7A5/6udS/MmvNIFVCy4XZCr77RCDPdS9x6ovKG0ZM74Bmxq3lSLSK33UFlPsX7fhLBeQXOvBWiiinLbQyaooo4mOyGUMgK/Kb/CRUj6TrZbRuqI7emKhfDxRjHuaorxKcK4SWWVUISDRia3iDb9EoHP4nM19J3DnjxC8cxESJQkWb7goLsYqobyngDsNP7odoKB93GkHWfZs3DFewHOlAW6r2CgUFaP4R5%2bOsb%2bVSPLwxKqL976phDuWI9yy5GFnPx5GUUgesC1SAkCdO/MnCDylbVeoe9fRg24sIJ2A3SxKHQ3gVUqoum5JYNWSNLpXVS1q1MdQLR7ozs11E7SzP/Al7TxT/cVYuBtSiP9O5v5woShurqKD4kwT1A67L9xs8HiZ30sf0ZElsU1lorvOLVER8oMwnYk%2bsUIqb7Dpg8Itc6zXBB3lrSaXR4D7IJPFVhxn8nlrN8F2XFb%2b901WDI6wtt1D2PPRYURqN0GXbHstQ30jRqni4Orn21g5VQYnDmvSEdckVjt3FVIWkF2SJM4ZlPlemkapvStPLZidwm4zw3TNlmjMwSvDuGbG%2bX2tp/avdnfRqUyh3NtFqzSLCr8vTqPS3UW3MoVqry7seaVD55dplLt1LWkCOsUJlAa0I87gb48hndnHRsvDfDVGMtTQc1GZYb3lYXVQRjTdEEkOlx3twiRKvfpwWxPUpRxVlg9RiqvWNO6Z6ODkjIezZwI8eSPB5vN9tLMEGz0fC5UY8zoibK5W5DDEPXp6Ylvjx9ODGDuLPsbWQmzPuyC/dEsjRXQiwP1zLua8GGU7lej7xi7W/vPPbvzmp/7D4suyhPxbA9yX7/uZV3zqc//s%2bz75R%2b2HOTIw4dTKrGGnMBcyVrDR6KXCTMZxSwA6Lf056bKKGRU0rsPQSYZOlIkl0Mx4SYowOYhpZYpZVmdLgHjCFWlBJbOZu4FeycqsRmZ1Rgz9yzqE2HNs7O1EiGqedM2JWSv5%2bX/zuR/obT7/kaOY97d/z2fn/uJjH5/9tf/zB54Yr9gyIUWtOqwyM581iwFba9yV3t0UTeLERvsuTlbGo12F/YCeN45ywlCQhS4rqrY126nBVl6qwvvyUhPW2DnN6lsAfq764zA5TktsDHjhPgQWHIT4HX%2bbgxhBsvEJz4OAv24QP%2bR4dRIuB0AZOvMa/9GBecTj3fyzATCTVdUebmyn%2bKYP2bjxBeCrH0jhj7syATJp2oB21iwKAmCdEkvK/lQtI5VgcwW4cdzFyWvKSYADydMWcI93AMrNb9/tAk9S3wdISPxJ2ktejXHfKQ%2bffz5EsOpJRUh9dWpCRIZXWsAXUhmb8UXibj3ISMGTGBhftRB1FYCfWnKxvZ3iFbcVMD49wNRMgLsWgS8MHKwgxbfPhShPuGhTU5lzhzh0%2byTu6ygWvtdAxx5HBU1VdVU2VJQYPfpN6XTeV5FYaK/vm82TTCw1QPqlAvabHUuAvNYvMqlOmHoN2BkmltOXa1QQw4TuCexH5TzmN8ztH/67pdh5I7sy0ZvhdnrHvHONmbjzETDpS7qwkpZlyp6jXvGUcvFlfofHMjKXfH/kNjwn0eobXbeEytVr6Bc/0pfztp35fsV9eO8I4vp0bzIMowYwLAA0xnGGyaj6N5Q8QIF23iMyUINQAXja0qn2wH7CAm60aqxodj1Ds0W3mESYd14rE7W5b72bYabiSD97/koP7/8nBQz8DNa4DbvSURVmVMc4kM1cVJ9ZqCmHJdV29MrmGZMlXsrQvGHBXiyIbMaeLyK90YW9VBL7yP2rNiwWb8o0gE8OXC3M6nssx8QLpEgUeO9c5o8pzz0uMOhMI9VY%2bX7JRnE1p3fS5%2b6wyupFVQ5GJCxLjkSFGCU7Sc/3BUbUFNi7dQXotg407qzqXEGCMbeEwfwAU76DjpXhS48l2GZUrxxgeS7E%2b95awcJ0gsVpBztNJX3hSzz2pVNAFr9G4mE07xVnH0kwhV43FiCvHHyUZCaf4s4DcGlCO1Bpk9rnnPaStIdUzKYNK2yKI41%2bGgLU%2bVKSGnU%2bUlXVuJrpEzXFmliHgqz8IY19rliTvqyv6E0ANn/P/KaRnBlL2nyhIbK8lBm2lSSG/UUAO8i2e4fYduKU3ngAbA%2bkIFzeepW4mvapbPcC3HsZWr0Ye41MrEA3ewQ/Pta2uwh7BfScBP39BM0dH4UasLceo1RzcO1LHdgtYPFby2gHNPRQlcnD7Saqi2NorTdRkERT9RxKnW0B4WxvBNzt4hQqXQLzadQE4E8L0G%2bVplFu7aJbnVILGG31WOrsoV%2beQodJpLpTzFRU0uF2S2GmzGLRohKuFbpCnHIxMTUWw9%2bpYL2kwt%2bigj4it8fsJwdiXwALSBXkWMvdEsLZFtytcURzDQSb47hWoPUljXBCSe4tTI7jrpkIp48H2E8sPP14F6GbYavvYaGWyNyexyfsa8ssNqZ1dgkLOsEWFza2dW57bD%2bEVWQl4wKyOMSdDxRwYsJDOQoRzfn4iy3gl//t2senrcfe9Tu/8NLtxv/WAPdXv/1Dc9/8jje8f256/n91bQdhGKoQqAZgwwlPr97ZoVoDWwdkmGiaoSYJbCy0pDrbdgs4PRujujyFJEpk5UXwMzXhS%2bU5jk7qmSi5zXCy0vEc2UR7mvs2cN2y0NwI0WhBvDonFn3Y41j7g5//w%2b%2b88fzuX46Cd8pkppcL9/%2bLd7/xY6ymJfIdUXOScW8gy40IxoNdQQoCQEuAhTZxODToGDeZTFv2caCWCVoXLPpyyTdHJceoyeHwuGaS6syAMiq1yW9tmH9%2bl09Y5MAsoCXTvtNfoRvNUSOuYfTy1yoe0BqMcJ%2b8FMbo100k4qiiMryHjMYcX7Txsc%2b4%2bOSVCB/%2bBcD7Kh9vmo6F%2bePzaTYPmHaGMtf32R4Ax6O%2bFYopZJIR/7OB85pFF8DDKP1VIgnglSc9fP5ijHtPeHj8SgwrUynLmWWrMPn1GP4xF9FlAncfgysxgiUX/RuhuMy4Sz7iKzH8Ey5CAfcqmdUAFFmcUiawaonunZPI/IKyhZusesLoPPgaG8UlFxsd4GvTECuLPu4cj7HeUCuA0bbESRL9XVhMVCtNCuPesqdQsfbR62RIyxMoMU6ldc5dLZPhsfqDA6u4r2gW/Qp2OmDvlRSHDI2R1HBhwURLgo4DvXwszjS87qMSYXm8F0vINlKb4cJX45nRNifBN3NNOZtHkzRuKq8atxsB7jpalO/HJhomh9KWd7KY0BG54W3LVXbl7xqgbu7Rob6k5vKDXXV1w1GZDHXtZNwJ2s31GdDOxEmec5/ad3pTaykNMRVBuzCXSNGzK3DClvSVQWIhzkrwnETqdwSeio7xfa%2bbCSlDQN//qwJ6//HnXDz5%2by1Yyy6cShdZrDSy8tIAmNcmoN3IaMw4lxvvuMCVWViQBTC%2bmKBx3YFNBv66olLt%2bQKqWQstutHoG8bxgpaSlNGMoYUG64kgxQT20RCWXlF0Ih85kaJJ9p3SmcvKB17Gy2vqc16DL/1X2zzJaScpTjkFhEmKAZ3RZhP0uypBdXLHRX82RomuMkUfVhCB88FimbR8CdH8ADOUI95w8adPDdDej1FZsnDfsocf%2byYHju/Iomo0MfVmXa1YdDXLzZwEBVL5KpZcmYPlXpFZHmwhdmfltmZpIiDcVDwWzbuuqCoES1/EoHL7xbJ4%2bOOO5N2M6wWrTMsj85SA9lAx%2bKxcmoxmyP53Ani2aSbV8thcPExoJ5nxsoNW/7CLDk/b5IZQ86/sNT2xgJT7kutPIpHh89fOS3kmXhViOgDuTBzmde21i9iJM3Q6Fva0VGbQyQH3OquoAjvrMQolB%2bvnOli9rYr%2b9ABO2YMz72H3egu%2bbeFGYGNpwGJC6n5rwYySLc7U0N5sojJfQ2djH8WZKrqbbVQI9jcaKNPGiEC/t4udtidyNz6WyuwYultNlYhruqEpsJSvuGqnMn8tdwjgdf9y1NznXC0CqwPpYrFFX/USrheMblMb0TBhtlvC1WJXzn21pxYCPGhiZVjqqX3mqxH8zQlc9buY8EOZC0/OlXDHnYpVfGotxcVrESoVC3OlVBaSqjqyQuU8I8GAWqrKzwu7MdITBVQ2IjQmXcTEcjsDjFU4dtk4tVTEfSsJvMBCuerjoz3gk7/Xerz5yd/4u3/8ay/dbvxvDXCnpOShf/DAe0/cee87a0k20%2bp1h8mpHCDYeVhHYD9XxpwdvmjtY4AxYQh8qM9kcPhAB3GK1VqCqfES2l6Ams585ypWhptR%2btfQU3oCZFjOrPij2MJeM8ZTXSBoxWikNhZnfJw4a%2bPqL/3hTz6y5vzZf/mxN/9ufsB79dt/da6wvPjOT/zs3/nx889HMjgG6R66zozo2QkCh0WWmJjljKMoOndVGXUvrqEsjjMsrqSKMfG9FO%2bp7P6Bkii81GI3Mq3pbHijfzVe7TLmjqxyhyy7DgMa8M7zyVv0MYRk2PY8cOZ3LCREPa0ZjWVQ/gqdMoZYIu%2bOwXNj8oyuqMkBw4DzmzV%2bKXozYpuncnUsTNVIN6X4oY9ZeOI5D0%2bdi/GGu1K4ZVeKIImGsRWj3SKjC2wStBc0aL%2bu2EEO3s8nwJ0ecC5TOnXKXm7ZcnFxMcapbQ/PL6aIrka41SvgQjRA4ZiLhCCcTNvlAfxVH/2rqgw7X4VlF9GVGCzM0r8W474TLh67FKOwoqotBseYxAZVtOWEp4EK8zyAmAuOGBhbttBtp5hb8bC/l2C86GJm1cOZlRR7FVu8oVfsDN94hyXuTM3uC4E2B2VKTLpD9txG2W6J1rZcVQmiwwTSPlm8g0H8v9fN4WZg4uV%2bb5h9ARxaS6/APBPAVatRjLxys8lr8427jfnNFwPyErnSCeKj139U9VLF/uujm3fFRwyZ8tGCVqPHGQJ5vT/fDMsuHtYawIscSo8JMuTlFiVDxpwJvxVqc1UEhQsd4%2bdtrof3qiP2uweJej2CdN0BeSyCePYLI8VRbLti60QyY9cw6LREbxpaRXh2MpTIsPbGbjcDyRMuimO6xFSBX/6lDL/3YfqNF2CdTGD7nLxz6CiX%2bCkTsrGMHEkEFZB8rABc6YsFniS5Mnn1Rh/jSyka123Y8wGS6wM4/P56R1xpKgmdaJSVJF95a0kroWhDTTB5OQzPYyih0ZVYK0upSmJdTdG%2baKN0XAF%2bkkuKr01Bj3dr1cH8VQfBbCJsu7UITO04iGYSlLwUpWIAK4gVcC%2bx45cwUU6QzWXo3XDxl9e66DRdlKcTvGquhB/8FnraM19FFcJiu3ix9ixF71jFUHu9q0RHoKolM/yeGvgidcaJ%2bn4/VpIVU%2b2aP1Up2ZKHQRad0hi9ZkK5wIW0HulpDcmCTPIyjL6ZtBXTRh0zE0QJ7tPBPhJXL5ikE3MlqI9xpKH%2bi48chiAyYwKvodl3MObso5mNQdXaPHgpGc3BKpxkCSUeBPB5fbs5LrENo1LmJX1oFLh3WIAvQb1ZQD0hcLfR2DxwlRky7gTuZWBnQwF3r2Dj%2buc6mH6zA6/oozPmIt3pYKNg42SY4mLgYTGkXkGoSzQLE6hR%2bii3WMU/ZOyYVUDeXBYXaIpgtFCdr6HLSdBEJbiDYRt1V%2bThlnsF3Ch1ZT6QYmtXi0iX9YXznq35sJZD1PtqkTPpu8jWfIDbXA%2bA5RC4EQBLA%2bBagHSpL3d%2boVvEeqGntQgpFvsl3AjU5D7XL2Ct0IWdMsEXspg9MR3gltNF9Gt2duFLfevyZoTKlRTZWQ%2bzax5uzIdYWPexthBicT2A43fRX7YxecPH9kIIVquY3SWWA7AYIOaCZD2C66bw7ABnT3m4azGG41lyzx/vA7/9SHTjiV/4T299OZaQ/8MD9ze9%2b7NzX7r0Jbz7m%2b6Y%2bfrXzj10fn/5u8cTzLR6qsLXcCVqVr4avEtlP7I2dJjJUtHQNTs2qqV06M%2b9zUSFcgUnZiLsu4H4HEdRNmSBTWcZzpOmDypLWNE38UXtMkEbmdYnIxvlxgC7iQOHhvsnffxfj%2bAzbx179pH/%2bluf/8k86/4Tv/702eZu450/8s9e%2b94nLlDfrquI6UTU4bxMD10dtmeBpd2wJo4x4u3KUDMlKEwccizl105/cWccZNyp%2bTRWbtKxck/8ELsuK8mcN7tOXJMkOW1jdxR4zw9Kcr56cWN%2b5igmnkw3B%2bMhE6/3MaXtR4/5YgymHsYP7OyOYNYlMpBbi0kRoBxoEjCvE1FHh2tzXcWChemahU897eHh/xAi7FqYKWe45x5X1QXgArJB71egQ0thAnf6sAdA7wbgUSqj2XbfAp5hC3ZtJFcJuD0kN2JVYOU6SwEDtxeLeKavTlwqk4qEw9KOyEq/%2baqTHh69rGJ4vOcFAncN6M3fIcuk88UQ%2bqorzDxHFn/JO9C7s2Q69ZhLFrrNFHPLLhp7KcarLu6%2bM0G7VkRpDPB3I3z/6RTVaQd7baXBHYbQ9YNgn%2bsOKHHgPXZQYjzWIqhTyW2cNHpdpTGnPObQxPbic%2bWRW%2bjm%2b7L3fjFpVl4bP1xwiEuNAqu8QtHoi/uN0uTz%2bwMm/4VOOfmTzMtmXopszRRdMjaVprKqSSIf7eM3uyF5mQ3PlY5QkrQ%2bMiNIAmkuWXhIZggrTgs9JV8aHVfIFEpz4EKZCXRaJmP0v4xOKVpB4Sf%2bTUDCKBRBuwB2o4EPOcaSTbakEFmMkmYcU7B7hMgQ0caXlVSZdA0Hs2MZ/uyxCL/4r1yELHoy7sAt9w6z7jzBHHgXx5mL2i5SIWKFjE0Ryxzm53cav8h2BO4Vq4vmDVsSWdMbHVgLJcWmZ3kAr6Q0LQPoE0KVA3AncpPhn9o28oqNii7sRBDfom3kSiIM4e1%2bgCf7PZzyApm7aAsZzCXodYFj444w7wq4G8ZdA/dyDCSKcZ8rObj0ZIxzO6msa7qphe%2b8z8W3v81HmFrY0zktJsr6YrlJqk2rfq008Kr%2bbbuTYMypi4wmFR2LjgTnGDJlC2mjajclSXWcADgZU3r2/j5SsXnOT8RccKkCTqyYCl8BebLs5jsrGBPwrgoMKt/%2b4WuUcT/0d/6BH%2bxk2uzwKvXgI6Bds%2b9MtGVuxujL9CcuaMplOslQJuMM5TNme9P2uQg/xMTrfkHSQDTuobLqjLIEe80CdpNMnIEMcA9HGXcN3Klxv/FMD0xbGn%2bginZpgNJigGSng62CxzQPYb2XYgXcr3gOTgwiXPIcrEYJdg%2bBeL2sGmqoLBRmquhvcdw3Vdr1lWmHMdXxWaqboFsDdALvlQHsGwF2pjuYdl05B2z6gJPBy2xsTSp5y%2bxOGYmTYXuqhZldGpEA29MtTG9XsTPVwtROVVpgsjBQcyN/h8z/4kCSclUUAVjqF7HmdxFTnZH2sTpbxqvvKaEw4eDRxwe4RqnSGhPMAiRRitkND%2bvzMRY3PFyfizC7Tnc2D8d3Y3RXLPhXM3SWGDaXvHfM1okHLDCo4mcplqcreO2rHRTDAaxKgO2/SsP5xQspHnv/z37dc4%2b/dEvI/yGB%2b9m3/%2bocOlt4%2bzc9OPOl8/Xj991ZW643%2bqfuOnPLKyfLtTfttphAwaHgsIDMXIy8az9ufpaCQLpw0FDUyf7OMGUU4uR8Db2iK/KWEv2BSdKYdqaznNnOmPXN1/5%2bLMenHydfnGxa7QSdbozzkYNSI8Iuj50BE4GD2ryHN92Bp191179/z9qT7x36df7ABx85Gywd%2b/73/73Fh594TiWmFrMGuu40ivEeup7ybSeLXs72hfkQjRfPzlKuHX1h4RsC1FkZkV8SAKjkXVsvXl44fZsV/SFGXUsfeM9GHS6MB/WQ7csRGwTcM5NKN5ufwIdyGh3JynuiSxIek%2bt0kizfzb6SbMcBPFfMSV3R4dchtkPr0k0CngEgDMWb5FrubXTA%2bYhAPpCSHzh5PpwjOPwWAwslrpK9FN/wwQBPfTpEOmHhbfc47JFotSy0mIzKJKsmUPaB9bbUtRAv9sF1pXV/JgPOOsB5Ou2vhThTLOJc1MP9J3w8eimUe8Dvnh6QJQAKxwroXwtxp1/AubAv3%2bl146Go0H0nfTx2kZBFgRGy6uEVjY7M35eUJpbymvBSLFZy4eUQ/grLDidiITe%2bYIveb27Rk8RPOk9MlgK88q4Q%2b0xMqAFfbUd4%2bA4L6x1KbXITmkm2tcnSGTCn9D/cisx7z5pAr7UHEm5RcQJeX2frDm%2b8XgiMVAA9DO/Vxqa/5//tqO/Moc24IGOB%2bXKkUeWa9bC9jWra8208z84fFTEgSOCCj6A%2bbz3Jnyfw5b/JBPPCOf6FnfZlfjOqgX8pu7PCKRcfcvEatxx5n3VOwqi0zoCaYcGmvK5dg3TDtpv%2ba/ahJEOYdsO8UwMf6oIzEUF7iigroxdlSKIeUgQI3FS07QWC9ggI6eiQOKiWMgwiG7/ycy2sPVvC9Ss2rFNk3WmVY%2bi/3B0x0hnTAIyWnJ7vowNP/m%2bC%2bpWCJLEOm/AiWfcu7MWS0sEvFEUXP7Yco5VqtzMNHKh7b4qEJgFxHq0GsiRD7ZiSzsgrS8VGUvzgmbBKcM%2bqjXROSVLc6hVxvtuFdczF/BVnCNxZhGly10E8fRi410o2iohRC0qYrCTYrsXYeyZFpZyJM82V8xX8y2/t44E7A0mybzTVIlzGYDrhHJKraGtl0WubFc6BZIUSs1YnQc1rIfGnpOOJJliygQ16MyskLcswjLruUExWFfBeBBp0JSsm8k6zCc53jZ4ln1n0aLyoOlKz52CM7kkkIzi3REouwyHskFwmD9T5meA/GFNgWX9OWdnVO2DqHcdBo5MM5TH0l%2bepSrElLfkZ5nmMzlnaeYlMu6lCm7eBNBEukckcBdpF7qrqgVASRuDe6mWI4wS77QKyqIMrnSqyXoSNnRGNe45xJ3Bfv9iFm1hYPFZCm3l/91mId3vY6iYYD1J0Bzao2%2bar7CvZjLQBjldZilnfQ8ufQCPbx6JMNRma/jiq4iCmVu0bgYPlUNVIoNSk6Y%2bhFu4LIJd88U0f9kKInTDE9G4FOzNtzGxXsTt9ANAvTXZwolXEeaeHM3FJjnXOa%2bOOrIzzTgenkzLO2R3cGjF0rxi57Wkepyw4RsZvMvEE7%2bYCdAyHCazWYl%2baY70BrMwX8VV3%2bfAn7Wz7RmQ9/VyI/YsZjk8nEslLTnno7LREe1%2bcoJlqhpmNCGuLnrzLeO8D3UUHtfUYfkHhSWLN5lyA27sxXveaEibtSMar1A7wi9cz/MX//tF3PvFH3/hLL2WM5jb/vwJ3AvQbT27Mft0//ppjyaCLe84Ulh%2b8Z/bB%2bVohuH118jgDlIA1u9kBAitDvZFiczfG4xfbKLi2MN3GmkfaSX6BLH/TYshSGd2ifTfTtbIekoIVgz6Oz46hVXRAi7%2bZMaXRYyM1AHbSA%2brEPLkBm7pNMeRn6JYrujTBuRsRrmwn6Ds2ip4CfWwYLGjw2mV7%2b7eeaF/4376%2b9lXm4fzmJ574%2bumzZ//16QAPrO8MVJUx20YxrqPjTqOUUDYziXJSx248iVK2p%2bzWtCxG5DD0dzXJaz1bWdGpYIRitOSeqFk4D3Tl4efAkXF6IZjmSxY7ehtjNScDYp59Nxei79doyF/CaLnkvKE3OsPxWmvLTsXz5KCX9%2brg/efx5N91K80z/iZUb8CYAedHadPzneGgBeh7k/e5lkZ0cN0mAsCQ9ETVFh3tnzzl413/aoDKInByBphaoERGHUskMm3KK1T%2bRED97nVlA0nw/jyA41suri3FwI1EZEkc3CSlWJ8YWUeDmQwrYF3rACfK%2btQscUgynZeny1yI7GIX1oki3DwAzNvgcQeD%2bE0Rl2MuBpTOrPoIL4Sim%2b93MxTnLBwfZGgs%2bIh7CVqtFDMVF0urLqxlC52ihZ9fHaA86Yg0jRIv8zzaIpU4iISpBujA6deRlKbh9Oqw5DvN0nC4z3Vcfit%2b37nRSSRZAdAcALXcO7eTtuoftJND37Fd6X24HZMk%2bTLHkKS4PIjPNZQhWNXtgwD95STEmqvjIVnEg79jJDX8zhQpMuxkgdvkZTC5vjU8Lc1%2bH1mU6iuUlx0aMkfGT/MIjlw0WcBgJJl4CMQJLkxV1Nw9fQHbnmPU2celIiQlMxwG6aaha2oMCNq50MsqsFBHmIwhYngoC%2bB6GfbaifRNJo%2bxdkKcOVJ0jK5Ijz4VYevpDn7/V2vArSHsxIUVUDKjT2xUOkMZDCusEmhc1ZaRImQ9kPMNL8nMB2bxulICrupjLxG0q4QaMvAi/9MgnqCenvBVkdLwmtSLpzSR7GMPY8onnmwzV8ppKnOJAe%2bU9BSPqQdO8E6L1lu8AIOIfu5AcUYx7isTDgYsnDadCeNeLPqwg1giy2UrRq1YQjFg6MBCb%2bCgULCw3u7g8nYB/%2bVdCcbHfBnbmHtiXgKxb0sN2QAAIABJREFU820tUXOFEKk6gEGWXdlEqjoK6tostDspat4eEndKtmQeDH3fY2HgtVhYk0YGdKubYwtbLm5LThNZjnVv9mzUGNGjQ4z2jidYr5XU2DTmMuRZk8/iGjbYR8ZtE5VPJtVWc6DcDJJsf/sdW4C4jMdMADaoWgN6eSh6DuW8SB0zI8mU0H45xl2x7sPRfYhbTE0WzrdiYnBUYiuZdt1PKQsLQ1WEqdHKsNMKEHs2evst7DaDo4F7FdhdiyXauf58Dy45m/0M4/dWkd5lIdntYaeXwXdSWNEkUn8XVjjFUCuycAqpX8exvRIuTnRgDybhl7YxvVXBjRMR4p1EAD7vWL83i0plB/W6i9TK4FYzsd0m6diPPBQLCWZ2ykidDNfGejjWKAmrztfVWg/H9hUAOe91cTotSjM453Zxe0rjxkwWks09FenkXrUJ5ZT2jNUVIH%2be71kRF6vd4bEujR183ppqY2aniq0psvQVsMRpe6qHKTfG3beUMDsfYK2Z4alLITqXMrglWkImSHRlcv5Wa3KA6WYBjeMeKlcZ9wMCLgxVQFuS5IkRu6uuRARra6Fgmq97YxUzGQtRAR3Lx28VLWx88C/eF%2b5tfeSlJqj%2bjQP3s2//6NyNJ6/OvukdX3Xs%2bx%2bee2W3H%2bPZddz6xruqBcf1jpeLwfxszVvJje8yqbcB7Ck5twxGPFHqIPc2enj8UgeVwJHGLayun6Ab6sS7IfAieOBk24ZDSxNk6CUqM30QtuWmsdiR6xVx90IJ3lIJ42ULBbIYvPFHJYZpRlEIA72C5IQjZbfjBOfXI1zfydCzATrGcVFB0Dc/5WNs2UZyLdz%2b3m/70Js2z3/3l6hv/77vOnvfa%2b4%2b%2b/FmT/m3s8IpNYViw5TU0RHQvoe%2bN4VCuo/QGZOqqAr2ZOj7EyKHyb/o286rlURMkQpRfz2OuKM83A3Dzn0ITJmxblwoGC43E5qZ18w23D7vAZ2vBGl0j7LPTUqvyxPII4DcZ36URNFc0SOyhcbKS5h8RjyYU5A7Drc3g52pyMhTeDGm0Yy/Q6/rfPSAORKsLKvdb/iDE1Xl2U7HjLf8rIu1c0wcTTBN/bgGg2TbPcoNmOOw6aI%2bHQvL7jEplY5Eay6mTsborLnwPAuXoj7uKBRxLhzINRi8bSCtAAcADxYCPBJGqsrmxQ7S42VYVzt4za3j%2bMxgAOdyD87Jsmzr5ELU0gAudoDjJoHAAi7n/ha6TgMUDjLHXPSfCWEvOCjNOFgZUCfLsJ%2bPqJui1U5x/x0BupmFzqKN/3klwdtWWHKbk5VKkuZE0%2bllqFAuorWI7KQuLeBKM3B7daSlGSl738Qkxuw69vmOPeyHtgBqvsTbmwu%2bgQLlfOeLQFu%2bM/aCetI88t7p9sX9Cd75MraE5SMWAfsDejyr7QjwGfHhgt8sHl%2bKXOvwGHbwl5wKmRgtETKTvazX5HtVfMXIbri5SXwdZfu5cKc0hUA/X0DKVJs1v/rlznc0UmX2ORRNG1Z0VEWt%2bG%2bqwiMlYI4iEEaSiQ1zTjtBo1/nsc3vsU/l2Xb22eHfuv2QcRfXjEhJEPuRDd/J0IsThH0uglOEsQ/XpeFAgDCNpRy5OGxo4N5qOSIbYYQrHsS43rHxke/x0c0iWKdi2LELlDvA01PA6bqm/vRd0Ey7DGUGW9GZdQWILwMuQb35fviI9YRgHAzkGCmwVFKVXAznwwW%2bltHQjSa93IW9XFQacOMFz7E9z0bpZXzG8H6UKetIhVHEjSZYVUlzlM0cc32JUAhw7wGrExYGbSCeUcCdmlrHiVAq2liuEjgXUQpiAbDjpQx/8EyMWrOIN94d4rvfUcR%2bh1Fk5ckvY5Sych8WCyNZInOGdimSPpobt4dtkFVJ6S5DNylWVS0rwMU2Ti/wSpk%2b4ruIyMgLE69kLQTgij3TN1oCJfTqT4VhJ9lDFt6IIE2F4yoLr1G7LoA8k%2b3ExUwfrtlLlU%2b8HFazGVx4EE/ovAHTlqUd6P2E5ZckVAfjJXWe/I4JqYZ8oia/2XUw7h/2qpez1FJU5srwnuZ17by/w7oiuk6Hmr8PxhGOsUxKlbGWxyPuGBCoZNgjcG/yonriALS546MTDhB2PPScVFxlOvUApRqwvc7aIg6Cko31ZztIexkW5svYuz%2bEG1vilubYKcpjup21M5HO8MWYSnHMQm9f3b1iYRKd7g5ujyu4NN4z2FswV0%2bKpNmIkOJUXBKGnXf7WburnGbEsCnDHXEZ55wuMkeVmJzbrmBrRjPu9TK2pluYJcimFGangs3pFuZ2atiZbWG2XtUSmQq2NRjfmGzh1qQkwH5nqi1MPvfhMcbGE5y3uzgdk63v4rakKOdhxRaedDs47qZ4xd2TuHfBxlofuHChjSvnbFTHFS7cXQpwx04f14%2bXMfd8B62pPkrbBXkgbBH1mT6WGmVRT/hFlXvCHBziQNqmsg2%2b7f4qlsZCOLaFzPXw8ZKNT/zIsz9d7nz%2b37xY3R/TGv7GgPsHfunC2defdR9iyeql%2bfFXnFmd5Ekf50TF/lixMX9jHStuzZIL40u5cqgXsbYZ1Mm8cHVJ4N7d6eELF5rwfF%2bYu7KnOlAnsjVAl70FtO%2b2Wyi5pgoYV0G0EKvCd2NZAXH4qBVDLM1UMagVMVHkgK9WS9MTwM4uYHMsYYGcfHiCtj8ZMDmhOrosKFoJvrA5QNSxsM%2bKdvQCpsbJZ3liLvp9lJ0Mv/Irj7%2bvfvGRj1za7OC7vuNrHvrBb3vNB5/SiamM4BbjXXTcWbkmgve%2bO42kuwsORgRFplpsn5aPaUMq4/GH3OI4wnYDBO7CEGgHmUOMux44ZKDVoJ0jTr4IjPFeN%2b%2byLQdISlv4nrOQM/7sL6Z5NI0t76Yhx80BdaN7FzmNLmIjNmKa9TeOMHzaSqtogKJ6fzGwbs7BgIjRpFuj7zfbic97VZ3LwrSNrb0Ua40A3/K%2bEGOLwJlTrEZIpwTNtlMmU4YwXd6Wg/p0ooC7pwDIBRc4tuXiStqH5dKHX60wZQBmHsblDu59/Rg%2b/8g%2b7NUyA%2baIrnaREahfoWC1JNd8z6qLL36mhWy5CCfLhN2Wl95GvZeB611glXRRplhAfjY/%2bHxHjicHzLGJSZzCW/DR7yTwZh0cDxPsz/ky6oSdDKtzHjY3E5QXPbz%2blRnetRrDDRzpL50wkT4rUq78qMLKw4JUmadhabA%2bI2CdkXWC8NbAQiWwFSjXtoGj5C8Loxk7Qcmb0H7gXy6hlfsYoC/tTYN%2bAeQjiwDD6At7r/s62XsuJgjq%2bf2oZGJUQWHazkt5J/hlMprylD/wkj8oOKWKRank13ioo6e2VSZMcchSNoxGe8%2b/zT6HAP9o9VT9fJRP/cFVkHE1US3THyjnMd8Pk031fsP8olznkhC/KkEwbG4m/5j7D7Xtmm03f0vhJS0NUAVm8hIZSBETkQYMUvSSAK5DPaMC7tS1C3BPUuyHPrI%2bZTMJfN8Rf/OdeoTP/pqFz/6FD%2btMCCu0YGUOoJ0m1HPNtbi87n0VSGjXSKMnLZtJruvKq8LCp0iak3BquQWAKEb0TTfgfamoQPwCk1q7sOe1fpNbXu3AWi7LvVf699qhyqJZ4qCW7CNergx93%2bk2U1xKcbw%2bhmfH9gRUH3MDAXaHgbuFaCaF73Eh42F5PkXZUomxtlVEucgEdxUh/hNK7XbL%2bN6Hevi615axs5cISO4yzi9FkhxZj1Aqk7fy5XM1yfwc40dlXyaqJBVlK0rPzXfJjdBrHHGjkfEslSqslKWy0qr0de0ao3LWVLsattoXLKLYfymVUi4vXJAIA2%2b1kAZVecoKyKskVyWvUR1eWPOyKWmvmkSra2OsrMwshq9DfxzIZAjqxVNemhOJRLXQfUH%2bR4fJqC7abWUDbIgkifBqnoXAloniN9O3KzmZjVhkKBnqLWrbI/RjV4D7%2bpaPXnwYuPf2A%2byx%2bFLZhu072LqoGfcQWFooY/e%2bAdwQWN9l0SMFojM3w%2bxmBZtzHRT8CfTDPcxsVrEx38L8Rhnr822RjRSCSXS7ddwZl/G03UGxNIV%2buCvglN3hlqSEZ1wmnwLzW2Vsz3Ywu13G5kwHdmYjszJM1UtyvXWtY5/cK2NrhmBdgfZZatklRGphd7KDmb0Stme6cJ/xkZwewD7nYWLOB2tuMIpEID%2b7VcHWdPsQ8Ofj2Zlsy3F579anW1jcrOFypY0xx8bXnCngntsDXO0AF57v4Np5C80wwcqcI0Cch5dpkwYkVVW04YmJAs7u9uVak8TB/kwH8/sFMFhFfMt8N8pze1GKh15dwdS0hfEsQuJ4%2bMyck/3X91z9vUr0iXe9VGeZvxHgfvZNH5r79x/46u/4mgdOfoMN3G/iSRuUEfAitLyElfTYA6XTa2RMj06xVyqpr2QlOlBAmAA5bfTw%2bWfbiBxfKqopi54MXYYwMu0GIxNYS6QnBTtFZNWE2QrsSNxFyqUiPMcDy2lP1WxYcyX4zHBnpx2ZjeW0LID1uLT7pJxYtA2MT6pJPnKAvc0EX9wYoNO1BFjyGukUxt%2bdcgGXwL1m4zd%2b%2b8YvfvbXfvgHGs/Gsz/0wXc/%2bI0PPfjBeCdCp58gKKjKZGQmCNq7zjRKWR178YTIZXreFIr0Z%2bfCRBdmGLJnZAzK4wgSFh5QPsj5xJY8YCVbzhevy4Bn/p0fj4Rx1sBa5At5T2e9oWEIRKueK/oyHOBuEr7ngCkse84HXph6nbQ6LA6lvd/NuY460vD7UVbiZqApzzIetQ3v17BQlAZuUijGsrAwaeHcDR%2bPPBPh3/5oirvfDEwveLKwXLb72LIK6LYjuUfutoPdmQSc3BkqYzVUkQDskGkHLiUDnCkU8cyFfbzyDTV88ZEm7GMlNRGRPLnWh7uqVkeJZYlW9u7X1gSsgz7RJvy%2bUoRzrae%2bI0hnmN5obLgN/77WBQgY%2bOK2K0X9nfbdFICiH6YG8FE/RTbroDjrYjmKheXszvnI6C4Q0rEgw20nAyS3u/ix42SgQoxVLNSbSsdYLbroaLb9ELNrO3BYfMOeQRUNpIVp9Np1pMEkataeJFkr2dMoZD/6ifK3mEdAMD9k4G/28HM5G9xkFLSb7/j8eUzDzEk4VkttpM3mNA2GRR/9yfzwQUCtgPjhxGi561IQSoF3A7yVM8vhglMH26mqskauo74n6354wGKfFp2l%2bM0f9GjzUcCzBv95UKA8uFNh082L25rKsbJQ5t99VeWW0SdZpJmL0zuRaSdbbm6V%2bXeO3Ryz%2bL1hMw%2bx7Twv7SxjjqEYd0ukAUPgHqXoRwE8J0ZqFRCnkTDtccIKq6yI7SAOmaSaobM/QGncl2I0j37Jw%2b/8rArRCHiPLFgJS0q2kbVqsMjA58E7ryfHvlM%2bk1xRjHtMCc2S%2bptMvEKxut1qzbssoNmWiXSlL%2boBVIC7qsSaXqMPvO6fxBrX6EajB%2becy0nK8%2bRLh3nLy8plprig7IsJJKijXaFcZpCgNJPJ2L9KZrRjYTBF%2bzngVD8Abk1QsVNU/YK4qlWKJIOowXXwub9sSf/9j%2b9xMTHm6zFfO0fpfB8RQhC86%2bhsvl1JBJNRUc1am3Yk9o4C2FlR1UVH%2b5jzHNlCmQdEtyYjiySwZ34WK7JyEVAyPu8jDHS%2b7/E3KGvZ79uouU3sh2NShZUSGrpfVYs2Gt1UiswhbKKV1FAtamZIH4h1XvjMOT8KGUUpT6ir4GbJsOKwzJ8a9IuTnQb/Uq%2bEZe9JcmmjA%2bPbzuvJ9zcdPJBfJofDuZZSG75kTtaVi0dBP4/BPsh5pddVUaVmm/kcGfY7McLYwW4rRT8sYGO7pXzc3RT9Jr3cA9S3QhSKFmyXTjI2Np9n9nKGxYUy6scSRONF7G00UCtPYhDXsb03gcnpXXlOZLvrU9RGGj8kYHqvKAmjAsKnO2o2SYHbsiKedXuY3yH47iG1UszulbEz1RE3xUky6QTW2zwmtUEAgTqTUr1nAyRnBrDO%2b5ia87CzMcDUfIDdrQHSOwdwnioiOz2Acz6Q35ua91DfHkj3mJj1sb05wMxcgL31EMltkUhhUjF/V9r3ud2KBHY2p1o4GRXRariyMJi5UkN/pYPTCwHefHcReyHw%2bY0YNz4bohknWJ5Vi0nTFfmDlEnzJFaqCS63HCxXVdEwurXxNyidcbUHBG1v6/0U/%2bBOBydOlxDoUOGjRQf/7fc6jzd//z//3T/%2bnfdsfplp7GBsfikbvZxtzr7pV%2be%2b6R0nHvqhd7/mg9xvP1SAKK/55IXyekXiq5kXNn7RNupwivQbrr56EJsvahg5ufeR4Quf2sLuoIcx30GcJPCLCnHzRpU8B76XCkPmFcZQK2fwXf5nYVAJMFakXzrEFJ%2bVmkWvZ2zO9By4y8ZgAbsZMM2HvQfMTSkG3psG0h0gnQJqsTrf0AUaWwq4t7uWhOG2BgqwUd8141iIEltKBq/tJWuFrT97y/e8%2b%2bes7/vx7/3H3/1tb3hvY0slphYyatoJzrfFEpJJpwNvEnZ3G31vGgWCd3cKxbQh3rZkJ/zKOOJ2Q7TtpqKcsnZjgmAuqVvPK8JYaJbdTK6mRPvoKi7PgoudH9lwJppqffqorMZQlYdcaPRAf7M2JABeV2qVqKiW2uTZ%2bPy%2bpuz6MDKjFyD5bQz7PjpQ8rrzen0BUAak5xxljNsNFwrVkiVlpf%2bfJzL8zJ8GuPinIb7qLYDre5i2Q6ynAfrNUELTQQWwNx0USsCl3UR5t9P6cS3ByXIBl5K%2bhA7FDowP4noP2WoJlgbg9vUeHDLhBnDf6CGR6o092ATdBORLRcVm8rOAdgPINTAQcN4HjhcV086L5nb8nAfz/JvfmyxkGW2AhLrxBRe39hNZMLtzwFIAXAjoNJCKbeT6dopb7y7hn74uwclxF7fVYqzX40P5CAawmUiJuBv1LVQKNrqtOsqBi16UMw6niC2YhBvuSeg%2bD9/z0JTfjzLdpi0YFt7sO7odJTJSwTPXWMwCQOQ4LJjE3BT971wUsNIn74OR7AhDyAVKcFj6NYTIRyxWD%2bXeHGGpKj7xBPl0jvproFJkkTEE7eqAwtBrZDToa0Fy7j4EwWGgz38SaUufFpgKOBpdfr6vCaOYkxdR5pSPuJh/p7/4EMzrfcS3nWBeu13lZTLKIcZSc4JIETORxDBBtRcH8N0EnYGHKKYVXopBStLDRtzNwChvoeiiXR/ADZQbk%2b%2bn%2bJ3/ZOEzn/HoCwyXYsNjEUBQTNIssW8O3nnB2mzANA7xfmd/IYinfMZo4A3bnl/RiP1YpqQz7OtLB6BdQPy8KXGtVkLppbbYSZqWTuBO7/e9lNp3tRCk3r3F4kyLlA6lOO4F6KaZ1CIpzmfotYGVMUpTgMJtGW6JfLTpyndbglmPVWoLKAbKZ5yM4Ic/N8Drxh2cPuHiPd/sY7/NCqUJypwvefoj7dYUYJL%2boz3XD43xenuRsurE1Xzb5txkmHsCdLVwVEcQQqmtfpRtzwxRB%2b3KLP/MTT%2bQ1qjfYFvI0VAsGKQDHEpOwxigYtFNm%2bSRCPx5DkM9vMglHYyVEiHgFJg/8Gs3fUSd9MG5Gz96OZNhwSVbFi9M4M1LZAzbLpEAJmbrm/iCfD2Nh4xURuRk1KL7bBKZRFraHSoGYmy1UrGG3NztIBoE6ErObYju3gHjzkjpxqWe7C/zYCND8HVFRGNF7K3vifzXdpTL0GSjgvNugNmJOnZ2JzE93lD5AfI6aBj8bnqzjJ2ZlgDl2UYFWwTlGQS079W5tLYR3RrKbhN7iu3bnerCeVaB9PpOhOxMCPeZQJ4Qn0d85wDueU%2bNjfqx8jiyjr1jAPtpVbwpORvC/pI/rLkjEeDERnS6D/ucrzCnlrQIoTrjHbQ5jpl9C89NtHCHDzz05ilJHr20G%2bOpT4XoZGTcmf%2boavuYtiqtlLdAfzfkwjJgdzXAma0%2byHEQ43AMbPZTvPGUizvvLmI8DpF4LjaLLn7qd/H4W4uPPfyD777/yUP96CZ//DVMEwdHZrLp%2b7/r7H3f/OazH2dLZtIQb14z1frzHKubn5gNeOc7Q035ECwbPnVkXLVI6KjRxsV1C1naQdG34Jcq8D0LlZKFgI4wtYKw3byRUlpcz96m848y6ntNYELl/xysLjh%2b0jJjQYmqFROoFhZk3qczYCMDVrUddoOrbzLum4pxJ3DflvBthux6EeFiF9M2NX42Zo%2b7%2bHfv%2b%2bj7vviJT2988De%2b481vec0tD2/d6MPzbESdHdjl2aGsj8Cdi5f9eEwlrYpnu9LBS3hSQmmKNZAxRT/NdsZqlcphxoTqBK/nqoUahxd5J1OgteFGIsN7nZdM8xYckrNw4U1tJhcMbRWtIPMu3va6SeQ15AZEvVRJi2HlDRNvzivvECMT2E0qv7J9MbTKc%2bZ1m8UEr9No%2bsXXQJ9svqS06YSlAhOLLTx3LcMv/98ZPvzbFqbvAu467cHxU1R7MbatAP1uKBXn3B1XVthX9xJhQji4MoQfbfq4iB7uKBfx3IV9YdgFeB8rC%2bt238kxPHaREpkSHAJx3qxVDcoJDlaLcK5StKoBOGUv/HuloAF8SQF4%2bXdN%2b7Dhs8GSITCl63gz8yDegPdLHSWlYcSKNQwGKdJ5H7cxRD4LVVl11oeXZFi7HCJsAwu3FHD/G228ZS7D6%2bYzYR5oAWlyDqTf6BD6ITBKIak0ShdOtKeGf/5uMAlnUFdCUzW3HrxM43kJZLzYo2qGbniAl5G4qTHKYWmcPpCAFIJ/zcwb7byR01Ajnwfw5joMsJVk2Nxqwnws6oqw%2bRXFzRYfR43jZn/%2btmHxlebdOsTQm31HFwfsayY5Ns/g8xgmYiBD4MhsYZjzli6yxPM3to/DR6ilAAzCGLhlpDOcGCmB5KLXjFPsM5TPhJQ%2bOkrPy%2bJ0jXaqoq5RAs8poR8RdGQYDEqiH6WfUpY2EQ5qGPQT9OMITkhZTYZOXMTMeIjnrwX49R%2b2EaYRLB%2bwbolgsdYFwXupjaxRg1U9gnnnxWj23T0GRJfUnSR4T66pBFaRzwwdaHLyGUHi%2bs4bUG9Wf1pGw9C%2bMPBrPeURz8U3s0JzVZe4sCCTXTsWo3nJRpY6KC4liBKy7sCKTdkQiwiyoJUNbyrB8ZqFJvM2b8lwKvRlnHZvS7DgK%2bDOE/NcG8/uDfDcf7PwgfdmuGXexamVAJv1WNxfhF0PON/qa9Bzq2lLkockVYh1t%2bVYq7XnStervmfbIVinJp1DEqPhtBJVC8xU5DOH8jQoH2SLyeluzNhCKYzd30LsUVKaz8Y3re6FsOZAWsNCjKngDGHoczp6ngnPb6iV1zp6tvPhYt3cBm0/Lfp/jQ%2bGEahcJx3Ov7I4Vbkso/IXkmKUZZocr7zjmQH2av62JTLPPiLMe1fLx6QqrY3NeiLj9%2bXtFLvw0N0YIBr4aDT6yFwX7R1PNO676xGCkoPNiz34ApaApJlg4pVV7J9y0dzYg%2bdm2G1PcYWLW7O%2bAGoxUsiNX6zyy/Pami1hZr2L7DYFyNnkd1rjmNlqiyvN5EyAvZ0BdpYqmNtoD%2bV40W0R7Gc9TM342N0JkZ6J4J2jk8MBFkvuiOA8RQaM89nI6Df66FMWymRFtdx2VNQxT22aXsxAncCMGG7Wx8Z6OBywZ%2bc8bFwPEXgFBMf28Y8enETk23h%2bJ8b5Tw2wXrcwu0Q3K5UQvjzt4MpmgpUZS/qfNGPd7OSzZtzJB81VVY0BAveNBvB3bk1x36sqqNgZ7lh0cX4zxT961L7xtmf/8J/ubvT/8qUkqP61AvfPPX39/feeXvwG27Lu32ulaCVq%2bjELpVk3xk5MruOFL27JUCp1aTK36/3YQNlQiUGaWssoAF5VopZXibHSiqLKjkrKOsS85QYge7sPa6aAHa6%2bGApc7yAjWNe/vQNgJgG2bWCWlVa3AX8GmKT96BZwfFFLZTLg%2bkaCJ7ZGgDszrNdKiBe6mKIeLbUxM%2b7gMxf6n0H9%2bsbbXju/dGyy8sB%2bK5bFR2o5KETb6LsswLQr7LsUtOnuaCcONQu2uzZqFQPceba5BFS5c7r3aH0dgcawLeuHYQD7qAvLKLth7BNFKpOruiiAXVdfNOy40cCbkKl5ymbwfjkJfsLU5KQ0L%2bYWY4bs4ePNgTxZsOQ0/VJkRi9UTIfL6wk5HlDSxXyC2XELH/5DHx/4kwH6H4/x%2bne7sFzF9LER9psReoMM7q6LQiXF83spCPjJZAzWXayhL1Vubd%2bGJYx6WenSCdxXS4iv9UTfx5C5szZQkzWB/VWtsxKQngsH5EMN/ExZDf%2bdz9zITI6zWAzZdhvg58t9BfKv5Fl5/UB5wxiu54MngD9WQhJmiPspknkPJ/opOD%2bmAyCa96UfXrswgFdzsXp7Ae%2b4N8b9FRsnl1Jc3VKaVR6SkjSTG2EmIrVoc%2bDGe8jYyQUJ2kj8CbhhXRXt0LOasL1MtBthtiVxlb7grLo58k4brvzt4f7cZrgIvNkCQHcXaRQvAeRzc2HgCeB1oqth4MnO87MBK3yXZFe6UOmTy5%2bj%2bXcOX/nTGF24jEYPDo2g%2boAFsvbij68kNC%2bHvZd%2boNd4o33J/K1vj/y0IZTlCXKBNuIikyec%2be95bbvsT1cazbgPuNbMWUAKcE8tMPWJcwIT7wjaKZ1hkirZwChx0ItTDAZMzG4hiRwMkCBsVRAElA7E6EYZokGKOAlkAW0lA3zx0zEuPRvgwhctOJxYTvHHiMwcoJwH7%2bYO5wYSlT%2bsJjRd8VSYd%2bJLLZ8R82bTkPKspAHwPJx4OWo0yPa%2boBfg3E8kNB2xkFSWaeKhYQxMRHojY%2bMSEF7u4XhxHs%2bM1XFMgDslEkBtgUCYjLuNRhMonkpxKgwQFtvAdAmLgfIy509vxRZ%2b/2MJXn9vBT/9nRGqFSa48t9VVIZR7CLzWHTCEVn4SknltUh70Jp3095NsSB%2bz4gjteuUyAjA1TyCaNC9OmJ3SkwWVHVV5nmoJGjlRvVLAAAgAElEQVRZC6Q2xt2mWDjSKtMw12x5lNuoW0OZj2rnRjefZA5cVmUN5uAOthEHMwfvvW2EwTRqhUR07gaYiIMNTQm03JPzmmHgJYqtFyuUwBoXS5HR9YFJkeeo%2bZV20Eqbf9A7h5FH7SSTJyUNRyELe32MUaZdrrvD61dhKv6ugPYenbxokUogmaHTzWQxEoUZ6u0Elwc%2begTukY/Gbhep66O57aFQzdDYYAGsHHDnc2klWFws4vnTAdwU2GwA8/WOsNeb81XMbtIuxBKG2z3nY2e%2bgtn1NuLbI7jnPKS3hqjXJzG13cY2/227La6r8RkCbw/ZGQXSLTvDxnwVczfa0pXW5ytY2OKxVX/YWlL7ip2mGfQoG82D8aMInJsMkPJ1rjaCcgbSwUcuWO4K4Tzhy7mSTS%2bVArTGu3joFUVMzgXY6iR49FqGpz7axT2vcsTWkW3bPGPTDxanHVzbURqxJYJ52kizm5NUSIHVaooL%2bx6qTixFz956TxXTMxlOzbjY3Uvw06GLJ97zkXd6xdIXHvu9b/nSofH9iD/%2b2oA73WN%2b82ce/JnbViZfA8tauarNTswPmMlqdNGUP6f86tIMBGyMwnYTwOubzobLSnwklXhc0znItg1foxMwf3izB8zR1BVw1ruoL5aEPTezPcVFM7qsrarYd8AY8LOw7Uxs0L7LywQFXFzdDLh7Kez1EpKFLqLIxpRnw6%2b5uH4tXpux9hp3HK8WZ6v%2bCTKVgSdOvrngndwBkc80tBVkz6UlZAMtWmDpSqAHA8GhaV9uiigyNMOsMk0OfNPN5CnvvJ%2bdBDOTjnR%2bU9RldOI3UQwyA3zlNen827DiBqjnLSbFEUbTmV8WhOQeoSntzt/JsxCjbWZUmjps1CZ8qR1xODAbxp3HIFtvdJX5apPsdGSQyDQVCxl%2b8td9/B%2b/G6OFDK9%2bwEZtwkKlG2IdBYStUCQf3rYjbMbz9UQlXG45Iu8qejYupyFuLxTx3OU92CtlpU0/piUtDN0x0ZSMOcNTcs56pjAPgCd5oiSVG4dAnZUcL%2bnOYRrwcb2NNB0yDxyN%2bIdGGwTvlNGYB0DQf1lLZkwCK2fEJEXEzRZdnKCTyByQdIBwPoBrZdi4EqG7k%2bLs3w/xipVxvGPKwdnVCBc3OKkf5E6MTkLquQmFCndQR1yYgRMq1r2ZjaPm0kZKVbET/33dn5lkahZY3JbgPQ/auT0vyejTDdsv7iba/UlAfS56xtvMZy4LAyOX0ouBPHgfHb9M2xN3Dc2%2b83lrHKFYZVNDQrlACsg3kYC8pSUBvvnbyBFMWzYsvSwIvsxi4uXaVI7OAXlm32jyRXOrFyAybus1IZn16aqDPpMKTbE2vShhvtLo3CquMVq3bsYZE/njM2TzJDChM5OMVVLpUpkShIkNjwtahxNfhpB5TvrzILZF01vwCdwriNCRiZIKoEGzBD9IEcUx%2blGG%2bp6HwFPH8XwL5z%2bf4vHLLq7%2bkaqYZp%2bOJFlVMeoavLepeW8j26/CqhJUjIB3DTKkYNOV3B3NJbAOpTOsamqSVzWpIn9X6sCCjpyxYYqMrQ%2bIB3xH5DPpFVWBlcxzTVdhFd6FRXESwFtQVqxkWUXfnqaYioH6VIqJThnWRAeLWRHVpQSDjoXaXIheJ8MEMzBpXecDV56L8InfD/Ev/3mKh/9%2bCaXAQ7NLVxpVRIwyFurnOSxUcsnL7G9ss0Ls0NaOUleHtpLKy51gn9p1ApejX8abVoP/kpJqUSJDBxoFjHTF1pzkxGjfBeCntpAidKrhthWpfK4nboPKzXg6ZI/oK8cnqiYjkXwYF4SRPC/Dvg/JCCbe6jGEQFu07LxuU7%2bC%2bXhMrK2oJF5pNZqEJLA2bVy%2bJiDXslPq2Y2k8BAbz3FJFrSU0R145IurDCvadhl9UsCdRZgY8bbcAtY3O7gaeQq4E8Bz/NmhBSTQ3HWxvzUC3DkHdVOsLhTwzO0BbLLFlzqyMMjODmA/qZiI%2bEwI5xzJmwzbcyXMbHWxNUNQ38LODO2KM0xu94bbbS8Q3LewNVfFzGYbW4sVzG225H5FiYX0NHXsLIykwfUdIezzTAxT8uhPDQp4fdDDJ/tFvMbvU/Uir3wa1O4WMDV7KDh1OKEoF%2b1KzqpFBI8vbUAW4hx4MmQsXREB3RYrfFt48K1FHJ%2b0sdFKcP1GiD/7aITVWwPUxmNpm4boMDJrgyNkuNSAfWHKksCZkdIQJ1I9slJL8I7XVRBUM9wxxxWdjR9/PsOnf%2bRD7yxMTX7hsY/%2bfwjcy2c%2b9LVf/ON3fODkfPV%2bujA0mEiie%2byMG2Mrdl8Q6TiqQx9iavRDMmwrO4uR1eT35SRjJtibrkREUK/pQL36F5yUAZs7wBwRuWbsZSJ3gI1NYGFO/dLWNjA/o35ncxuYnjyY9EUqcxTjfgRw57HcMVcSVmezGJUSiydQw68KsVAu45RnhXHvO9OHgLuSyVhD4M6TEVcZAxZ6OitdNCC6IJKjQoJDtxiN9TgoGScAM1hIyEdLjMhAjwJ3DtJkIAiATTVWASaaGef2xvVFvPPJvJKl0A/LMPHa8etmI/rwe8NQmus7sr0II6GkOkYOk3%2bXc9D5XpLcqheB/N6EefPfyfc54L7e8vEP/7WFnSt9jM1aeNv9ATpuH/EeJVkWLjo99EML3q6DS01WJbRQCDK0tl0Bl1fjAVzHgXW9D%2btkGV5ek042ncy7MOdaw86BRJdXl3dKX%2bSkTMxZTzQy%2buvWzn0J6s3qWBh3nTRibpqMHrpHynGJzKm7JZjXOnnuw%2bIGqyUk/QyDXopbFh3RyxYWAIcWfXSVpF3rZ1NMf3UZ9941wGtu9fA/ncyw1kiGNqpHg3Z9MpKlqM7FiRrIgmmEHS6LFQMvi86cf79MloatHinEJwO5vg2j2%2bUtCc0zJYDmUGDmcQPcyeCbhdxRwD3f9gxIJ3Dn8XgstnsCdJ6K%2bNDrW2208SaxldfBBUbeX/6Qaw377QAYo2%2b1saMcSfY7dC65%2b/SiHeqIDQy4YH82SYACRDSjKPIe/WQI3Fk4iy8CdW7DSALZdjNGm3tiSBhJQNW/y%2bNKwrcGLmYbA9zF7k7fO1ZIpRWkSGeSTBJODXBn5JJsOhMz%2bwMLBd/WzFaKXrOEIKDuO0a7MUA7KotkMYojJK4HP0vQ2rFxbsPGZz9CJpPIB8AJ6t3Zt/RqS8NGq3jzpFWRj7ApM/h2DEgooeGxOI7GgLuq2fXhfTcTkJ6HuO2hxqsYXeX7rhs8nVUI3NHGPmoYz/awF9Zw9piHZ7oDrO7WkE13MchSWbhMREAwXoQ/1kNnkGIxK6C6nKDftZGW2ih7HqZqZWw1Wujs%2bPjkF2OcuS3Ax3%2bSWnbauKYC2jusAlxwJGlUbCB1ITEFmNUFGbadp8rbWGeFVYee6zaiJJOhZLiYzrU99kuSOrx0Ho%2bL6mJJ555ZDuzBNiJ35pAMRrmoqPGh1QqFnWexKi/cQVacFuZeFjEC%2bB240Q5iSYCPUfX2EfvTcAf8jra0G4h95dxWdfexH439v7y9CbBk2Vke%2bN0198y31/Zqr%2bqq3lvdLalRtzYkIckWGGYcGIgxijGCMTEQOMIahtDAzGjA45CJMbbYYWDCEGYZGwwOAtFIIAQSoqElAVIv1d3V9ept9eotuS83M%2b8yfP85J995We9VN0aeq2hlvZs373LuWb7zne//ftQKyQHWXVbp9ISV9ym69zxQ14mfhHFnwiWOOxrrTKQ8uozYzXU7arWgUgklEN1s3MfxV1h83b4Oy5La7VMaczCwVdrJFOPOetPihGtcwK3tPpqdHLabfdG4N%2bsRYtcXxr1QzY4E7m47Qe8b5rA0GGBrM4UvsgZmGclw%2b3gZx5hR0AF2CcgJ1peKWLitWbwsQ32pJMC93gBm51U2991j6hiJ3XYcIX4%2bNy7gCS9CIp2ilraQ8s5c1OsJFk8BjW3g%2bJLWkxMXaZ%2bl%2bp4eOhjgSjzGWMRt9e%2b9HerW1SdPO0dMZ8AHEyzteJijhMJmGAzfqYdVAvfN2SH%2byRvLWD6bE4L4K3sZPvvLHZy/xEzCTNpJ7OBgdkGlTzaXkGFIr1IRW9Dt6sSCktKYuk7gzlXR73hrGTOnUzx%2bysPi3ySB%2bugNBxu/9cz//Opza1969ne/eZKk86g%2b/avGuP/I//PMP/3IB9/4kdbIOZ1Eieja2UCt1Y4JuLZZHpt9NV6hh62E2A/ADpzLUwLi7Q6B2qo%2bsFgGdihRj4fYDXIHZDf/JYObwfzsSrepWeISTwqcL6h7IHBvbyX44voQMYWue0PkCq6kHyYjwFq05DlY61Jmk2EwG2I%2bTfFAYSTWTGO99FLMB9JJh2OCdgpyVGeV9fZkhi2MO5oiN6B%2bX5gOHWlvOgKWhwFNEs2vmXlh0feT%2bx0YSqYZa35p28xNEsdYldSkXGfnZmQ3ss9ymGF5SVCrNQ7xHgiQVM9/QPK7fxvW%2bKYKwXK/OSz4Tx/DfsbMxmVVQPcLNmM/rbE3E0XTsIy%2bnRktTy46%2bMxLKb7jhwIkiHH2soN7jynd5xZyGHIAYdDJCMi1PKw2E5VsKQeMt32su2NcKeRx/WYbAUG6DdpFXO8AF4vAdZ196m7LUf8lFde4YpwnO6/XYo%2b6hhybqZUAHnsqj2ScYBxluHzcQ8acJZQUZMAtx0H/RoyTD4U4cznE154Z4RvPccWIdezo9ZT9svbgjhuS%2btwfNtHJ5mQAHYxU7Ia93dEXGNZFs2OUTVAewI0gnPIL/donlcvcEb83S/n2ec33ZCAFdNmxONTmDpXzhe6XJ7dn5kmvR15jP5PN1JN0ILiZMDY6XpcA1mwERkZCIDIcc2F9rMQSaG3/RBb0GvVlIonjygOVhlwl0tIf/tS20TQrHwywkhUrK47Avk9zSfOe%2bTmtbee7EubxELadx3OgFDcZ6rTpyCQOZKmy73XJ/qYio%2bF7Zr9JCUyj5SInGQozDHtFROkYHh2R4hTtcRFxHIkUsdOkPWsmlnnxwMdv/lSMqO0ChQQi%2baYz2XIMMGiaIL7SBjpVkdDYDjOCQrTMawICODrbTANb9%2bwc0t06vOMqADbtVuCW6ki7c3DLakk6ac/Dq%2bwhac7BuzdC8lwIJ9%2bAe6wokpmUL1RkMy5qZ1J0biqSkFUgSPtIyNrfGGD5bBW9JEFtnCKslhDU%2btIvnSYDe2KAs2OlIyvPJ6hUE9SvBXj6yw4GfwX8n7/o4x8/5YLJ03oEf8MY5ZJvLNW1S5F2eNHOZ1Q3D8axktLkGRSpQDPHJVt2aLKsmuBOgs5R7GLA5CzM4hw4Mjmj5Sj7Va78MnhT1XdHge3cooyD/mgPWX4eTrSDOGDSJtWHMtjfNcFK8m6U6FjkPjKzcuW56Bff741QLPnIMtfK4MqiIV%2bsZxJa0M%2bzk%2bCSxE9GRqPjwfg3wbwJvj7Y3BTNLrIWrhrpnAjTTdK0E47dhoCToUzGuwRVJrLqxaiUfDhOhq7YQSvpMN2e5N8M3OYkllmHRxl2e3k0213crufQaHaRpkXU60Nkvod%2bO0Bze4Rc3oGn7SCpcffyLl79rTVcfOspuO8M0UROZJN8V7dPVXDydkcFkLvAn44KeGt%2bIDlnzGLK3jEF5NkuuRHYn9zp4s9GObzFj0RJ8GdxHk/mIzTryo2PR7Ya6hliOLLv88M87m/TfgSoLQIE6SJZYr4ueqTvAXPzqlybGsBT%2bs6JRZw5qC0A9frBHBL8nUivmERxieBdTSoaPNcCsHMbmJnlhJmZ6JVOi8D/ze8Lcd/ZUDITrzVTfOKXB1g8BiweDyXRW6plbAbg8hqs/9U5FXAo5I5h22Pg%2bJwv7oeczK7WU3zH13iYn81hbgl4MuviX3aqePrnnvv44/f0P/mT3//m33mt4f6rBtx/6Gee/dGPftej/2gYO6dZ6Tqp8v5a8mJsJz4WvBi7iQ/q3HeYAEOPP7P049Vk%2bF7iT8Cb5t4OvX9WdC4LmdTY5iDDFLnNIdLZnFSOBoF8EdjT7lzs9HSCrtcqm8n3xDoGsJv7Zj/NRs1Bj6nibw4TrKwMkVRCZAa4M6PkNkcEB%2bnSAOOhixqjtGcdzOQCHEsGyJcVcBdHnHyAUW8PTnFB3jxdZEbBnGioKZGhw0zWb6oU8mTGNRg3gyBZdTIA/OQ%2bkZrofx/1sDYzSqs5Ywd3WACbNAKNcsyxImnQ7ImR0kyWADUzbyYZ5h5scGHOZ6%2b0HLhXPSO2JQvTWnnzW3Z%2b5r7tycR0QKt9fvNb5amtsuay7MmcL8wA//zfOvgPv5eBuUHuf8zFckHpQ712Hje8IeIBEDQ8rPUSkdcQbPR2PAGR64jhb0VwqWvf4KxJPwUZcTLpJlBjQkm%2b7ir5%2bg40mlzDKpiZsanEdus3wF0oA/WikxN5xKMUJ8chvJkYHgNBqF11Mzy/ksEpZ3josTLuP93Ht18polahJaaqIIdOvvWSci9ikqZQWPawvIhRryEDN8EaC7%2bQ45K7esTDgLuAx5EGvLokJvVIkpQoGYuReRw2lZg%2br7x2tjnq5imh0UDd1snzUnJdzbQL4DYjg3kjU6TqIbsnuFtegwbh5pyT4613I1Ih/c4mDjda62/YbjNZEXmD5V8vx2tnHOOQY%2bQ7Ur46oJT/ljIjGaB/IxNv/W9WC7HstIyAjho8JsDd1rbrlymTa%2b4nsz4lk7GBOwEPdezDOEE8dkTXPhhnmnXfB%2b50RNlru7LKRYA/6pQwOAS4B9EY3SRQWneCBdfH2hcGePo36f/pwqEjFPHemVQFrApy1A2TAzGVNcshktUxvFMBsiYtWg5O/5yZOWT1PThz8/LJTcD77ZYEsIrzWa%2bmwHt7AS69301blJFfI3K6zIzV6J8gwQOlGq7Xb2GACpwsQekcUPlKFbevtvHobh7PViOcRrAP3GdKCCt9ARhnwrwkyqqcVOwlWeDhnoNPftIHuhm%2b%2bcN9/Ph3FyW2jDKPiZzDIkiEbdfMu6mvPM4QOuM0E0kg2w43G7hLXy/BqGo84hhNz3Eh9djewn3gbs5t5DL78yAHQbyLbjynJuUZA1kJvlWX6o8b6Ixrcu1KroHOSGUOksytcESOl%2bbm4Q73xLmq0x2LVaSd8InAXWwkx1XUCumEfZdM4TpIVVaYLPc2rmQb20f1GlWwJm/Kj9Uko9%2bjvn8//4rdcRv1wB1Mu24rzLPQGzDTLS12U1SKymqXE1s6ynBSK45LFnCP6V/eSPHqLR/Xxy5muvEdwD3MOfADD1srA8ku7AeKMHGaKUZvKiAq%2bdhr0xWmr2RABOxxAU%2bGkTxfswE8X8njLWEkYJq2G18p5fFEOJR%2bit/z/VKV8NlhDm8OhnIOgvZrM3nc14nwYi2P%2b1sDfHm2gPsYIcwkm66D6gzwTJzHlV40cfFhcRjFp5n0yyq5li29UM3jMplc3tw0cDSrQxq8T9qb7rxYx2rMx6NXLnd31HlPPBDhPV%2bzgDhO0ein%2bNRvj9BqJjh20hH72ZnZQPziaaFriBtZbNMSKV52ueGjfXYs2I4TKx4qREbg4AP3pTh3ooRjiw6e8rv42XEVn3169%2bnF8bWf%2bJmPvPX/P%2bD%2b6S%2bt/fLbHz71dgPc%2bTLrmQLsBORzToy91MecG2M39bFAIZXezN88ft6LZcK8l6kgVvOfPYjLu2HAKh1XNICXfQy26QJL9OnnDK0PLJQUeF8qAdsD4ORoiK1QgXoZDF8HkJ8mKamFn0uVxo2rX/GQpMdB4B4UHdTX8%2bI%2bwuYcz0c45rnCalVnHMzmfZzzGG2rgx307KxYCDHq7MIra/Ce1dGKZ1HMWhiGcypTqqsUeuKookGzmfmLXt0E3ujyPSqwcx%2b0KjbCEHlk22lP1ycYLdHCiv7S%2b%2bmrhcmnPEarOMx7NPdkglWND7yR1ZhGwwmHdIiW7t0wFJKdlWxGV3vDG9R1BOtugwTR1B6yqmB3lof9ezJ54cqHOCQ40ikGfopv%2bsEiXlqJcO9pD/ec9RHWxso9pZPHDX%2bIhDaQdQ8rLKscLUiBaEulDw88Fzc3OtothhaNWlMuM61DYM9Xm3F/rQe3ezGbcafs5iRZ%2bh7GJwsYD1JcWaK2OUNuidnwgBfXUqS7Gc6/vYgT51N871Uf952KUaeNm%2bm9Drm%2baDkFuHMQypBL2hiG8whjlSZ56M8iF9NuTJXPBBpZGImgz9a4kx0muNXNWYJa%2bf1k4D9qZcfcnz63rLaoEVjepQmA5SqRfT1zHX7P48x17Mnl5NGt%2bst9MrnVtpT823jKm3MKqNYTA7v4zDXkOTVgsUH7Ya%2balxYQr5l0EyRrnpFFLC4wFhjnAGbfk/3vu/Yj9g3o8mSQqanmpo2RKTfnuStw5/J4SgcYlX2QiUt8TwXjjRIF3GO48LMe2oMyxmmKAULkohZGqMEZjSaMe0Yb1tEY/SRAd0jwnglTmY593Pj0AK/8WQkb6RAOzSsSF%2bn5GA6DTA2lyIKMlf6dbLwzU0PWJGN%2bxNqwfueTck4ceCe4Fh8r4F7c/23anhXA55Xqyi5ypa/kMsdUJKQQOmkfvayC8ukE/TVRLyBEF6cqJ7FSv4XsRAHLWYh%2bmqKWpMjPlsSrvzAzkHI6G%2baEkOicGuLYbh6f%2bKsBsu0yZk8M8fGP5fG19wK7LbLn2iZ02vpRfNudQ/XqRkJDuacxMrDjGozMRqwfqYoQ4E6RsCuaeRLvTB1AqQwnDmTbhUUf6kyqZgxzXQwEBOvg3LIPd6gBO7OQ6nGKlYuJj0xb0815/11xAlGint7MmtUKqjpOzbrVOKjijDjOmbYp0hita5f4NysijQG3jNFpx1UBqTQgIBlkLCBN4kS7mbD%2bE7QbWd10G57Er4kjj9LIG7KSjjLitMc%2blM5lY5IKlI852N5LsdIF6utDJEkBTYJa358w7gLcfQ9ewcHOq5Gchzft9VLsXQ1QDl1sOAGW2n08kyqGXQlmgM%2bTOQ/UIPu5cR5PhQN8dlTAk34k5SjfFwjoM7xYLeApP0JzFyC4/powElDPfocWrfa897laAfc1IzxfVaw7bbR54JcJ8OXvfYXF%2bi5wdgF4vqQAPt%2baaaomrm9lBzi9YHkOmX6YEps5zeZzvNWOMGbSyM/GLvDoIz6efNJDHAYYI8Nv/PsBep0EJ047svLMeh2nGebnVcInAnhJ4dDwsTq7L6HhhL86m0k7Zv1nX7a2B3zLG1MsXyngcpDiydoQP5Gr4fd%2bF3%2b5sPb5X/2PH3vyXx3Wn9v7viqM%2b5u/4VeO/a8/9N7//P7H5t5E3/ZxlKCVegLOBbwTrCc%2bjleB9TZwogyMejH8ko%2btDnCMbLwF5snQk6nnVk99LOrvD1R6LhVSMkPvfgnW2PeFl5ehA522%2b0oyczvIKd94fRICepHTjIfYyudeNwtvCox93GHAPS2FiBtDWY7azah9DpR36MIQceSCvEB5xkEt9HE%2b0MBdvWe9JBlKpxLGe4j8ecmqmfX3JGECgYJqzPsDhmn0BnSLjpRad8v1RdlG7pfeNBhSadRVzVaZGpU1V190jmqSwI0A3lh2CTaTJUDFVE%2bz4NJxHuLJLuy7STJBCY2VHdVkgWVhiLzmYH6MiU7sQAXWDJ4ER%2bkH430ddj/mdwf01xawMr/J5xTDt9XM8Pf%2bxwBpIcblBx1cmWcGQg%2bDYYKgl8f1MELcd5CrO8gXXdxoJZhteGi5wGY2hs8O8hZTGxv9Eqn6qcH%2bqwnWdeXsrfkoneYUXz%2bxtb98RrUrE1zTRxlFdBTbx409IGfOLBfKe17pYbSUQ7bg4wyXwxm0eAp4YS1D2sqQu%2bTjwYeBDz0W4NHZVOoof0%2bNbKnoy4W6g0SyLvYGqSzB8zsF3lSgai5uS%2bZjgmC17dc5s8e0O7OiYgJYBVxrRtqwJga4c1AkC2g6ZbveHKhDmlkWjbfF0Eg5sU2E%2byBeVgI00JXiIhDQk4aJbESYxDuvxgRDXJWxdcLTR029sgNf8zs7GywZcGpkDwTlT53QgHdTF6i/n3jSa1aETPzdznHUZEK/wYP4Va/uGNcY%2bxheTqRMehDmpx2YypbBFUyxu9OMuwB36tt9B/1xOgXc6TzTF%2bA%2bSjIMmux3M4xRlWxOlMq0RuxwIrSbquy7kS%2be7tT7Lp5NsLsK/MFvpZjZy2MlGsIV7wLqORzgsswOKLBVgav5LhxSgmmGZGMEjwkOJLBC1c602YTLNX9TicyKF6mbfAtZVzNKrEIimVkQ9h3M4ioDgK5w/N2SSkHKJX46rDDpUm9NO7uSrfaAE80qbpc2sByeQlzrit3cLMt0lKI0U0JQUUymvBJtTfuVlzJEnx/jLd%2bRx6WTCf7Fd%2bZF3ni7kcjklBbLZiwyVUm07BZwNx7upQITXinHdCMxFN99arsHqibTB54BqmxD/J2s8OiVG16PTGSuQFKIgFyt0nfpdU5GnUKX4R6S3CK84Q5SymTIoWsXGQaiMT8Ex6VqroH2cFbZI1ubTJS1j3ypFMAZ15EFs%2bJ0QzKq2x3Lp%2b0EM2HfacOcKS9xThhMuz8KNCnGnW4vaqysVEh6MWhWkV8HxmCNT8Tx7Yj534SUch2JPZh2lBEr1WGmLIdHCrgTIN7azXB74OP2Xh9RK48RJYTN%2bCBwDzxsrwyEbfcZm%2bO5uPW7W8h99zIqviN4qN%2bO0e8qZv9auYB7ebPI8EK1gHvFlkf1j7U5B/Vd4MWqYuGbWgJjXsXztYKAb1ZrAvg3%2b5Gw6vd3BnihUsC9OiBO6qkObnqumsd9rUglvWNBMO3JHnB%2bHnixnMeVToS1OnBmEbi5q0D6ms5wz/s6Na/kMau7wPK8ztWjA1KfK%2bfVNQ1eMEw5VxcSoNEEvDf08YGHFzBXcjFMEnzyE32sf85F7YFMVgVYbznFEyY9cTA/Tzmt6b1TOCkTiimb5OU9H83zYyw0h7hVzGG7BbzpTIp7L1Rx/4UMf7/axq%2bmM/jon2Lj3c%2b99PH1lS/%2bu//8q99210RMXxXgPm%2bW67cAACAASURBVHv1xx/81Ce%2b81NvOBsutUYOxgNGLStQbiQyLMwFh%2bmV9/so/hGWfAHxuZIPxj4Q5Pu60Y77sYBtgvolV/3WHsgb8KXSM2COS322dMYEt5mAkQlz7wANlRMAc5qNN3VjihxT4F9fUL6z%2bgT%2bnlnTyLjT8aDdS/DF1SGSUiBL/ePGWKL265s5uH4m%2bsn4WF/uk%2bxlOfBxUQN3VQnIWPgYdXfhFZek41vIN9AYz0rCJWrce0MZUlSFk06Qvq5KxlfVzIDxZBf2W2e3E2ZNg3e782AHSMDOjoufEigkwF2lYDc6d5NG3ZQ9z002Xnx4LfmMubVpaYKQG0YLT8mSZiv4YwH31M6SUWcnplepTSDshPFgMBADY5mrxGI67BUH0fmb1YEjAvrM8090%2b1NAh9rB2arKPPsX68B3fp%2bL4FiKBx93xUYtn/PQ2w7wkh/h4mYRK2kkus6VZiaJl2oNB3XXRcl3sZbF8G5HqmOm4wttGV%2bvLEZrCrs3LRA%2bDcz1vROoV87G6K77KGvAzjLqrur9ax7Ky4qT4Ck6t5TmlvsODRROUvRRRTFti2VScqKAcT/F5UUPwyQTS90bHLA7GWav%2bjh%2bpoAPXXXwxNmhRNH3hsofSZqMyI7UgLwP2K1Cdz0kUQdecQ65tIX%2bUPWm%2byBescKy16K0Ra9OtlgPHgacEwyY/fyJAdYTRkWfxkhtJnptmy7X/vMSrGrVI7ve2dVmGmwTtPN6Molhu9YTEjLQUiZisWfJbEzeCculRgJcTYMyZWlNZP82Hbe0P2v1ku1TnG5oY6xv/ig2fap5TP6cnvyb1Qm5Zc3kT9h2/RwHwLyWiU87yghwdwnwXaV1p/wlUgn4JHvqAcbdwXDkyXI28ybQqaLXigS4e1GEZgDkmPSkA/Q61FFnkrSJrjONLV%2byic6dSFFfB/7wN1PJOImWB4cuHyz8Me0vGCzOaDSVzCUTLbuOoV6ih6eDtNGEOzur3m2jDrc2h3SvAW/ZQdaZgVNqIVnP4M7NwCnvIesw5bZ6gw7ZdxW5p85r4lKW8iIJMf7pZvzizyTmgcSV00atcQq5RSCt9MT9ZcFR9nPzsYNeNYfiTISok0e3QS98B41n%2bgjuzeMXf9rFw8fHWJwLcX1tjHxOadQZkKpAtA7enxBKSuMubTNPva4KRLc3GU90Vl7T9rM0FQ28rEzx%2bXT%2bEfbrxpFDtPEEt90E1aAlshYCa2rRu71UCIBudyRuLf3%2bGKVygF43Qy2vwDo7hyx1BMQPGA0tmyrTggb2dIVX98u%2bXbHsZOk7AuAD9Z00BuU0w/OxzHnLNb%2bFTlw9CACOaBiy8i0Te6GVJ97ttLCcDk4lUXVYEP9EN69jQXpaz27OLS4zg1hp3YeZxFUJcB9m8o7a/QyvbBNLRNiuh%2bgQpFqMu9K4%2b9hmAqY8s6i68AIXLnMAlIrITg1FNkaZT7cN5BxgfpZyGQLeAWZmHQHnz80UcH9zgOcqinGnFIbF/sJMHg90BvjrSgEPilE%2bQEad0pjJSqqQWapIX64o5vxaJY97OpEA8TNKcCBluVoHzi4CG0zzQT5plrlSFGgnMDc2o%2bcI3qlQ0/b/Z%2baBlT1geRa4uQPwb2k7XFnXVYTq0RfKeVyl5gnAV6p5XNwYoFgJ8diTKU6fKaBTdvHi73Tx7NMZZh7NxOyC8/n5awXsXuwrUyIuCWjgIwCebXCeGvkMI50PIY09zNViUYJcnEnxhnM%2bLl7J4dHCEDedHP67z/r4roXsF3/jx3/q33z5U997V0vIv03/f1QfjtLln3jP9b/4zl8I/eC0LLdlmSS2odyFQJztgWCcwPxYGdhqA8fYDrT%2bTTowh44qMQIN2oe9GPmSLcrdJxDN8Uk/lkGCDjDs7Jupr%2byZNChnBO%2bEhTXNWafdljZsdE1aBz8ZgBmp3AMWSyrY1RhXEagrwAzs9sQSF336dB4A7iFAxp3BqWmK7S6XeFV3sNyqoj7bx8V5D2eKPmbSEVwuIRrGXXSAqhPJx3XsxXMoZQxUnVe2UmTfe02x6IqcGWSDJjzfVdIYKRStz9aJ%2bAjiCYBN0KbpKAha2ZGIJKaoPk1w5n4iFs26a/bdsO3CsJMhsfS5vDTByV5LSWxshtOw2LYW3lQkCVzShT69KmD08sZ60vxGvN11gBD3mWAos4xoy3ruUGyYmDJTXKLTVCncWQbU95NBmq046I8y/Kffz/Aj/zvwwHsDXDrjIw6HKORcDLYDYdsvbBbxShaJy85KO8NMw0NYAJqOg9B1sL7RhutT8pVCojdeB2hnXe6t%2biifi9Fd88TKzdTL7vo%2bAOcjEJiXzjC0R23dW%2br4jv6dYRS6m%2bp3/D03AfF0dljxUD6lnWA4oK77KDE4z8xSqXceV1EctTA8lsNyHMKfiwW4X2ef%2b/wQ2T0BrjxYwje9cYivYxCeozJZDiIPZcYDWADA7kD2F45U8FiQdjAYMUBI9ajTk/QjOx/9BcHyNBtufiMMt/6D0hGxk7STJTEY2wLZNqg3zDnrEtl7sub2ZgJeDZAV0nRKanPYfRGIiv5X932cQBjm3j7/JPDUut9DYzxeF6w4eO8yuZ9eLXitgjbrfTpewT7cTA7ESUZXSnuBcFo6Yxh3Hsv3LvadJmiVTk3i26483BlHxGRKObGE1Bp3OAgykiFlYdpHsYNBa4ggn2HYLkgSptR3MY7zSJII/U6GwThASA3zpg%2bXGUQDV9LHD3sp6l%2bJ8cKfFLHFZaUSZD/Be3Y2FibuQIAqJz1cdTxBKtlB1qzDYZSbYab4yWZWaiLrzcKp1JF1Ce7VS3eKDQlSVSgDcEtNZRt5eahcno7nkWz2cb6yiJuVDtJreXiXIyTrES5UF3G93MGpdgVb1TUB7/lFIKv0xCKReSF4Xo/X50p0t4jVZ7sA7QKrJfzab0e471Qg2ukbG0MJEGW/yqGb/zXbKY4veJNJq61x5/vmMcxVwfprVtMUG%2bxhe3coq7KUG9ostgFMJiu1ad88t4DosvJ7N4MY2Uoy5dSou6M6koD6dsW2qwDWUBEBkiPVQTWsozWalS6PhhCsft5wV3zb/WgXMVOes%2bA9R0gnI%2btRXZ2Lst9AEi6i2xtN2H6XgbFM3CKbnv5KAOaRHpcTtp33SU/3Xk/1PNMAXWQyYqG534JMW%2bEV%2bhHHZL7Lg3IzNVa7gnd6I%2bX8YgN3Bj9ShbDZdrGyFWHcy6FH26qp4FQ/9HFbNO4O3MDDrWd24IwzLD8yj%2bjxArp7IzlvpwXkyLhXyIAPZI5Jxv2%2bNuUzZlP/eq6imGw%2bq4DtOWWVzcVcdjNs4y9V87jaiUC5C03OTs8pQK4xPJY1c356HripwkRwngB9Bzi3qIG51enY5WdcgMzX4qXORJkL6vdk3nlOAnkzIHC/mSRIq8lUH8%2b%2b6E3vCXDuuI/SUoBP/mkfr/xqIkGz7nKGc9sFvDQzwGxN1d%2b5VwrYuaTK5PhLBazf04fDPmIMzC6GWN5z8HKNge%2bKRKguAE%2bdSfDwpTKWFjOcLCR4xys5fGg7%2b8Xf%2bdmf/rWvfO577uos89UB7uc/9p4bX/pnv%2bATuKcp9hIPi1AgnGB9idIYUtMZZJ/Zoq5i2gnSc3r/hNk2b/KIgUQaggZi2UBJchj4ygbTZpCrtv3jhM9mk9hOdrTzjLAZUwMQATldaQxFxQLa5UpAWc3W%2bDclNnwmbhyMOKjcGCa4qYNTGRy7R7OCbVqTAT5njbkeTnRK2J3p4w3HPVR8H7PpSNwMTOfFpTalGVQG9cor2ZHAlFJSRxQq6UzSbymVgcs08iogVZIK6bcpy/Ha5EBpirVHsmEDHCWNOWy2T%2bA%2b6KcH9GcEsyKdERBP5kCBSem8JRiJgZnepFM1cpq7yWikv7SoQPsdcUAwyZfse5QOni45Og5FgMe0zt/y3p%2buOhIUJ4xQJhkmp8uA5%2bcxczUXt9vAj/5EAU//Xgf3vyOHC8s%2bctWxfD/YDbBCS8jIQbjnIFd2sNZJUGu4qIcedleaOH/PHFZXO7h6dQ4vv1IXS6/JdoQ8RkD7uif2bdy6Wx7KJxMQeHOjxpVgnvs6mx4qJxUd3NlQAJx1omeDdD2Rk99tqMpRO5Whpf8tOzho8XwbGvSbz1UF9mUiHgHjE3kkgxTLCFFajHGd6dVfTeDc66M2X8D7HonwjReKqAYjuB7t5DSjCIKCFO2uj3JJTeLVdQ0CJOPegl%2baRTzowC/MIY4ohGRS6ztlxDYxbs5jg2Xq3ye/0%2bSo7SZj1wlzK7ynaaae%2bwxoFy07gfMRjkbs5I2V5N0kWtP10awGmGBaAe9aW89j5Z70Pmln5j6sExnpkCYL94vVHHPEMvy%2brnd/IcMubnvV7I5T6D5TJiT6S3vSMUm2ZN3DodIZLZUx8go6yrCmi/Z9pIIWaftogLs4aNAaMmUgMx1JXETDAWKUEScJxqmDfotyGWDQzmMQx8h8OtHkkSYRBu0M/ThArpCisekjoF1voB6AIJ0OG7s3Onj2V6rYYuBSScVzINZ50olADPvOH1HGogle9xQDV0fwToZI98i6a5Bu6%2bCl0FXFz2IH3sURkpdy8C4OkbySh3sxQno9B/fSEOlLObgXh4ivh/DvGSJ5KS/HSSCcXnmhqwrJoPVqA/ONKvKLqnUEzIWwkeL2TBcIM%2bDLPhMlwDlRws/%2bwhjvuN9Bq6NWfpiJMxcqkE0SRGnVlcOLyQgp1otpegDIyzFmtYZSy2EqNnfFEv3bPeT8dOJ5Lpp3EnMmWZMAftXH2%2bDeVBclb6GMRfWDBPDC1HepGScYzuAlu8gEjO9vdJYRAme4h05Gi0g1jBOkJyQTGTQ62kaSo/F3oowIQFtJ1bYpt2kOZzHj19Eczco9KGebHQl%2bpb%2b8y%2bRO/pL2p%2bVgY/RN6j4UK%2b7osVAlh5oeZ9Xkwnjf2/ev3kel4EvCRdu7Xe5ULDGVlFVlT3UF4BvgzuzdPG%2bnA2y1UqzeStFoBwq4h9OuMr5IZQS4%2by7cvIutz2zj1CMLGDyeQ3%2bXdqqpnDvktSx7TIOZqDG/tx3h5dk8yjcinJhXUxqZfENJWi52lEsM993SAF2e/WweuZUIp%2bZU%2bZApJ6BeZ/iHrleGUZdy1fJEG6hPDw%2bTIUUXqenDpI6ZyqBXYdlfEsiv7gFn5hQjT7kNGfxTNWBzK8PXvcXFzNUcFmsuXqw7%2bIN/3cXscR3Ie0ytblzaLeDa3EACXOdezaN%2bYYB6E7h6u4itiwOZuXAVmqthj7t5XK%2bOMexzDp3gLafzeOxNDi7PuHikluHrdwLc/1fO0y89/fSvfPbX3/dL0%2bOF/fffGbh/60dePfa7v/rLD738pR9QwD1J4ZO57KtgVIJggna%2bi7DoI%2boosM59/DQD%2bev19p7cPFcx%2bzHyZR/pIEaTwD2IsRcrZxpWbGFmdQKEyYRALz8dVSji8WzjCr5z4mhrkm0yyLMycZBKQ%2bD6ToKbN5WrjN8cYtcHSrsFrJd6yGltCDuuUr2IBx%2bKUQvcQ4C7J/7tTmlJrK6EBc7q8EtLAt7JJGSDOrzSIpK%2bZtsZ7Kp92g34NR272C5qr3eVWpwdmwKtUfT6MysqCY2V/px/ayDPcqS8hi%2bSke7UQk4vod4NzAjwngooFSAlWTZ1EizdsXJgIQNvOkJTd%2bzOUcl/FHtupECSul0GFbW6oO6ZZXCQORGwlldsxu12iv/tFwv4i9/v4cFvDHCxxpUTD/2xCky9SX175CCou7jZTzDfItueoe64yHkuNja6kpBElks9l5mj70jZTIa7cj5Gd8UHtedkxCtnFFAvnUwOgHBhzDdNc1Vg2zDwXQ3c%2bXdtOUFr08HMcobmhv5cU73ezEm1j73gzOkEzZsuZk5naN7cZ%2bQNMy9gftVDkZMDJmCJEqQE71GG816IrRMJup9OgHsdXCpnePADAf7huRyWimPREjNFvbnbYj5Bt%2b%2bhVFB6UcM0q4HOQzpoYeAuooCG7rPVaGdAKY8z77pPe9ESWTf1%2bVr6df7W1L%2bjuADDkNsSG/YBtrb9Dr28NUoY3e5E1259Z5h6A8ANs2/6H3MdXpsPbwfFTt%2bP3CdXDBgsqy1VTWIykd5Ma/30eDVxxtHJ2IyWf1rSdmjshzU6mrFPZBs686n9HObf/N6W0hwlnZFzaI2vDOa0gtT9LYE7B2kG%2bQ2TFKOJj3uKOPVkdYZMcT/qI%2b8DnVFRgOE%2bcC9gkMTIAg9ZPcKoEGDQprTRRy6forHhw8ulou/d20ixdMZHezdFrgB8/kUX6R942Eq5NAN4vCmC5csJnC%2bHwAWtfZ8gA%2bXb7p0MEK%2bN4Z0IFILRACSt78Glj51hakUS48I9O0LyigLo6as5eAToLysGX4r9EgG9MlKQv8%2br48lG8zenW1WslpgWLsPJTkmA8lalIxp9h%2b45QYrk2RCOk0f5qR6%2b6SkP3/v3PeRCgkLF6vJcjGMisCCQZpCjkcsYKYto3LXPupBMMtFV/Tzf7WCUSeCwyFvKHnIeJXUpStrBRwWjqqRM7BtkhVi7zEjQ3tRgTKJI2PaMY5QrAF71BR6quTra47lJ/RK/9tyCAEMGanKjrp7yEod6Dz1ZENLNIdBVtbiY58TCgz/Yxji3hFKR969%2bL641GpsYjT1XTVnOtA00S/UqQ6uaBKi%2bTLULtSKgyBZOMsi8G5mMIRWkTUxJZSSxkst7V8SZDc7MuSljpS0qJ5qUJXE/x3ZKZQjcPTdDq%2btgs5GK7WBjO0C/O4ATBhi0AjS3RgiLylVGNO6hcpVxcy5ufW4Hy2%2bYx87FAC7jSfxUEhKt14GLC8ALZNS7SltOIL88p97d7TqQ%2bsAp2ioCWKerDB8%2bAU5wUYkxXw1VNmS3N%2bmz7gDHZ9SxRvpLtp06dkpaCKBVoQIigeFvrPwPU1Xm4J9GeWZsGeWlWm6CqUqWzPuzJweik9%2bBxIqUswwPP%2bDh3KMh5ss%2bnr%2bd4dP/povZU66Ut3Nc6dvFFTLLcKFewMuzKgbgaqOIF2cVGz97rYCdi32ZEPOis/MhhoMMY3%2bMS3PAu%2b4t48KFDJdzGb6/GgC/tPP0Z/7f25/e%2bvOHPna3Z/w7A3ee/B/94J984N9%2b%2bE0/ZaQyBO5bXeBEhUuQMQKy6t0YYYHBauqlEbgTdBPIU0ZzR%2bu965vRL1Gz7my0ZMoFwOnBisCdmmgTucxBj8Gk3GS/nglbqgD5blIg2iPesHJ2Qck%2brh5Qg8nVD0pl%2bgm%2buDZEagP37SJuVbq4HJVxM9/DkMC9VcRbHqV20cFCNoLPAB3DojgeCvEeet4i8vEOvLJKEiGMe1aXYFXaQfrleaSUyVD3rl0GTRIkU2zCRjPQSoKVFNMss1WC00NA61HFfQCw64MIig0Alg65aAJafUn7XGBAqyk4/mYKyEx7qU9f2zDuxh1nkhjHZIHV5T8tkxloFxxzPj7zYasK09ezAV2O9lg%2bA15SfOSHy3jx1Q4eeF%2bAC3OpAPIBgXuUR2fVxdapAfJ1ByuDFHMNVxxlGpmLnO8iCDysrraUftBc0GLaJTMvJ5dkyI%2brFQzR%2bRO0n0rQIxgXsO6hdioRllxA9oaD2gmLNTdoyqZF9cqBNAaOKaZRJEDtbIbWugkyUBWe484%2bE29NCk4qja1MqqMUyckCspEKmBPby%2buAc7%2bDB8rA8bfl8K3LAZZnR8I%2bNyzgbtdJ0QNmLkpFNdj1BqHYgBVRR99dQMFpoA/mK2hgEKl6xDqcN97/trxEg3dz/gGlYZSvdYGCBe4n17frpAaf0n/T2YJSG62ZPwrg23p53Y2pyaGW3hjm3/QjhkG3J662g5FpGnZ9PGwSYX9vrwJIn6RXmGiLaD%2becd7hIVwRkGfSicUMO2%2bTwZN7nrLZnLQlza5TWkMp0WGmSObY6TZnO8nYgF6tgCnAw/76DuBu0runmTh3iWd/TPcGH9mog8yvoUfgHmToDEpInOwgcGeMST%2bV3yQFSgYSRGMVnEonjcYtH36eE3IXO5sxAt/FwhkP/eYYW19KcWPXxfrzTLmaws3pGFTq3C/EcK4FwCWtfSfrrpMuCXinZeSJQAWr1hjJpjssO/KZWDbx4F0YIrnOk4uLuJJEXh0iYUZJutHof1NCw33uhSHO9Cp4dWsI79xoAvIzZn90U5ztVrE60xXGPuM720rgvSGPb/nmCB98p4eLJwPc2o1Fzqbijjy0KH8MXBQ0Ay5OMGIsoEmYRLHlpZIKRpVkZjkP1K%2bTGd5rjibjJscL6no5OeBkkgCV9o98Nk4IirkUt5sEwCnmZzyRicqmtfvUs9OukcDdMO4M8qTFNHtS1e4sak1cZACfdpGZYuCLOZVxVRFCrlj7qhBarlqpBlPKK807A2LTVGWJNWOWMO16VUP5v/vodnhPakVcbWa53zDujsq1Ik4ySvazD973A1PF0IGJl0i26WRwcjbt%2b87Jx2EMPS9Hpr3KRE4DZQlJV6594O6gKwGsGZodYK2ZoFUP0U162O4UJTh10AzQritixQ09BBNXGcplXGx%2bfhun37CIncsB3CHlnQweTwV0nyeopvZ8SclgWJzUml8r5nClPxTNOd8hg1qNpGVkyVQM9mDQKKUx3Mi2b%2bxpuRDBNI/XLDj7FzrHkAk3G3XuZOYNzjOvwe4fTV3qvgoULwDHOj42yzFOdX3cKivHQtYETjpkcqCTh/G9siqe0/v39oA3PuTg8hMFnJl18eIQ%2bPTPtjHHSRNdiai0iIGr%2bTyuzVC7n%2bGevSJemtUJqehzT6vJCjD/cgF7ZN9p3DLMMLsQivPPuZMx3nrJx8MP5XC1kOGXOgGeXcFfPvvRv/i1rS%2b9%2bb8ucP/W7/vysT/%2b/F%2b/d/2Zb/uRRi8Txp2N22x6QiJ/EriL1ZWu85st4GTt8OWyO17GITs4QxXdfKCkMhPXGPrHBzGud3zMl3S/ac3seX1xpOmrl0hAP2GrNIBq6kzX7BR4jrp2r5FmmgAzJTVgE4xzUGn1EnyBwamVEF5ziLoLFLeL2Kh1EXK5DQ7od5tvFvHEYwkq/ZEEhnBQo/xDMQ8KYfEaDOjrRgkKcQORz/UkB8Wkjt6IwTXMpOaIE4de6Z34uhtAweIyuvHx%2bPUB2NdT5vaL5QTAAHijkVestQKGXR0oan5jAkJfj5xgAvytJS5zHqOTlI6YjB1l0loGQwYpX1AyCwL3A1bLhzygqYscXKnHq1ZcsLyev%2b3gn3y/I8vkj70/w7EgFa/iaJzgpY6Dc7cLWM0iAYh7rzgIyLZ7QDHwsblGwO4JkyFYfUoaM5HETLHrPNQw6wKkb%2b0HvAjjxMFFIx%2bC%2bBaZdAZJn07RuOlh9myy/7mmDjT76PcrYw57J39fUyh/m80BamTl15wJkM8SV%2bngCU6YXEmSwSg2q3fDRVaOMb/s4fF/UMA3zri4uDSG72USNGWDVJtVUww86TgHRWcPA3cJBaeOCAtARNbdkckgQZ3ZCNzJshNc2CstkZaIEbATuKuJ5P4xA5OIS1ZZrN9qv2men%2beWeIjDZCWHyGMU47jvjmEm9eyoBdhqeQvPbSb5pl3a/vMGeBvEfWBeoQuMH3eT%2bpCBJ4svgN5iGYTB15MT04TYx0ngrC5UmXRo%2bY05Vv62rDBN%2bRv5y3QTOkxGw2OoEzWrAibpEvdPA3eWOYNPRfOrpTJss8yaShDC1S%2buXHEFhxNqanqbkYNs3AGCGrKkiyxz0B6UMEaKQWsk77PXLiKis1OUCvgYlxRw748D5AMlL9jbYKBqIjKB3ZURXLKPHrB4NkRnjzFWwM5fx/jkJ1hXUzhFHXhoCpCNkcGrl0fKhUbr4Dk%2bUDITUzpzigGseslIaTPUJqy7Bu9XI6Qvq1TsE0x6oKAZFOuI/j2%2bloN3KRJpjUhsXsrBv6KYeQL3zMuUfIcJX7dihGd9/OZvAMs1XyQYq7djjJNUVm54OzLO9BNJNJMLPVnpNPIVk9MizVIB6hN5VcZgYAacKoctIw/hzRtQz6y2/Lcijsic71NfUqcDF7lQuaCwUkjmXjM5t1bJCKKVI4snMheV8dRcU9UonpuAnHXLG28jrFDwr4I1KY/xxjtIAv6O/76NJFhEysBfCZxXYy9vQwXBMlh1/5MnkripopouJHznsiJiJg%2b633A8keh0k9qBlUJZnbIaCcvKOL%2bZ/kZGfbGGJGN%2bsIWZYxTRqBx0SJp0hzSg1JNen7kMGFCsTBsle%2bpuHxtbPsbZEMkoRKc7RBxwUhqiQdY9pxh3%2bri7IYG7g9b1HBZPD3H7fACHwN0DXlllvVA68xUdCMo7PDsP/Mm2hwsOUxOq4FEy88Qj12Ifl9xYUhHIG7ISI7JOSOC3JhKmpS/290p3Y3kS6E70QNA%2bHYZuAOXzVrlZZTiBolwdMofoTNcE8aZPsscn1otWA5h7dIh3XypiZiFEp%2bzjP36sAX%2bvivwsUF7qIRnriZweQ9nundMZrtQLeL4T4Uoujxc0897YYf4eFc9IW%2bV8IUQwk%2bBdyzk8%2bjjw8Bzw6TjAz30Cf1l%2b5eYf/8GPnf%2b%2b6b7W/vurwri/83u%2b8P1/%2bOOPfg%2bBe0K/3YIqbdGuc8nJDEKWMmECaHSjOeomWaG52VIVc6yp8JJQox%2bLFEeOpXTGUf%2bedWPpQMKyjzGDX/Tba2W%2bMO8E5bSrsleZZclKlwwbDINcJUhcBy%2bYLGocHFk59zrAbpLg1RtDJOUQTmMoCSt20wy5vQJCz8HtQk%2b0TgTub3okwSKXYbkMzGUZK8KeN0gAX0j20PfmUc6TVU9RzHYRMQ20lvowSNWjNaEM0IqZNFnqKCcpa9278kpWIIo6dJOx7rDynh6Ep5cwp39jJDQR5ScmfXVBdS6Uz0zLGGw97lHgnffL33HQoNvMYdle7fNKh8aVj55Kt62uS0mQIwP2UZtZsuQ7JfPB900t39KcK4zQ5/7KxQ9%2bNED5gRHe/UAOXpFurlxKTnC952AUZ8jXXXGSWekqxr3uAwUvwMZGWxj3Bv0XiwAAIABJREFUSSdsM%2b1kSqgjp%2b6c2nWXYNmSt6w70onLpjuu2TME5gaI7/9b6W80GJ9%2bUPPdUYBUD46zpxXYv%2bNcLBiTRZTg/bh2oGGZkgU/k0f/uoNsdoxy7OLJDwT4uksOLh0PUclFuN3OY6400BkK9c3dAYJlbVjAOoqLwECvp8q4OLVWrBmxvHFK4im1FSgBuy2r4VcqoE5dlxMAu%2b6Z%2bkOwbyYD%2bnQiIbD323Xt9Uw47dcgQ7swF0riwnuw3VcIkrW5iAL8WgJjpDAG9Nt4zz6/vUowtZggfZUB/IbFt1lFuRcdD2CAuikjmQxYmVtN2djXPmyOI9/rvtM46MizM7eBnVBL/9hm201gqmmXSoboCBAYaMadwJ2ERZykaPcGyLyKsPCjUR/tfgn5fIooZYAqwXuK5nYO3dDFzHCE3TREEA0RZb54ueeCBBt%2bitpWCDefyuql4zvYWx1LUhuRD7hAmANufznGc58pYpdBq7xBJhKSaDvd9phldewguzyCE1PMrReWBZirSmDA/EQobl6YfG%2btih3VYemxkxNpbt49Sh8vcJJKRV/5j6cs5%2btjIKzg8e8a41//Dxzj6M7C1QZKDRORGPGdc9wzdYLBpEzYJGORHg9FKqOT0Rk/dl5bAG9JBadK3bBQBPeRiRQpjbGiFOtDjmOcsCvTg1zgqEmkwQSHWPgaAL1/fnaMjM3KpL%2bWWCcC5ngHWW5JxrZSwZN7pi49zi9NFhtJglUdWksuKaf2JNPa9uQAeJfnSx1Uc020hiqRE5lzynboM18qh3Anwa5qAmGCZVkcAlIdBfYPIwJMllT7OwHzBKAE41OITCa0YiYRTM7JfXyfVe4bJirnCIO2xy5ikawC240EN7ue6Nt3tzI0uh6G7X3GnRiNwJ39af3VPJYeiLH5zA7cATD/nnPo1LQ/ej%2bVeC%2bRrel2a%2bz%2baZZHYG36J97Hy4mPq14sJNjJeSU9scG5tfh%2b5Nh8xxems5lGqwLIdB3kXPUmUDoP9FYgScp6q0DpjPV5AyhdAMjGl87a5u8Hr8j6xhw0izng7FMFXJrPUD4f4hM/38atvyogifs4/SAJPtYV5T1OQO6dyjC%2b6UifzjroHVcTU%2brgX5ntI0kczNFNdsw4hAzeDPDm5QBf93CA06ccPDt28Atf8Dbu3d35yq//82Pvu1sB/Z2B%2bzd86FPHGmHpg3/8k098T3OI0wJuNIgeUsde8JUO6LVQ4CF3SQBDpxlu9Hw/LJjbMKYJ7ZGYpnkQo01QrrOI1mhBmQKNVAWs8lZMttZmotDNjKc0%2bPyrbmVvnYA7y7fZrCAI3tDAnVKZRjfByjajt120fB8p7SDzwO5WiKLnYKfQx616jJNOFe95PEE4YBCfBu5k3LVchi0hn%2bzCKR2Tjq4oAH5hX9fdr8MrM0iVDZ2zfJWQyXSoqifdn6XKEpz2aWeFNJ2gaQsHGpKFlaRPniKI7laRKJ9RwagqcRNZ72mAzc6Mm%2b0Fb%2b6bAwbZyKi/n%2bzptYDShC3XN6YYTAbeUhOpAoTs7QDY0M8q5ajlRga4r%2b1l%2bOwzwP/x4QFm3lvC266GCEoqCm3MCdrAwfi6g3wVuNFNMd90ZYCnvr3gu9jc7IiG0O6wOLkUTfvpWAWdas26yF/WNFi3X0ZGtnwKpFvv41B2mA94VDs7ik22r2mz8fSEPpegsaJcgqonM7Re9VE8qYR9TpqhnxbgLo2Bl0O84VtSfMPVAI%2bcCTBXHmN9z5OVodDtopDXKcwNWLFnybLkzJlXU1FThTkgqiPNHAHeBOXqU70wqVPWspJhre3HM6c34N0G7qY%2bkJWlXl7AfXZ44q6jALycwy63qTKffgXGHtJozY3OneCJfchRm7SWaetIffDfpjvl9c2EQTy0p/qIu7VrfnckSDc/nDrAdo%2b5o/1NsY98NxKEyoHPXGsC/pUl5ChJZfLFf3OSzgDVYewp6cyYgap9JE4Z8ShBGALDzMGoO8SoW0CUxoh9D226Y%2bSAdp2WrlwRCpALU9Q3Arhk3Ul4ey5212LxxRZW0HUxOuaj3IzRcAO4rwywsu3i5Wdpik4WRmWulPJk2yGopsPMhRGcF0lTMgBK1xXJvppBglhXRvDOkPI%2bwnLpsBdygBLUE1tPxZGIEx1B%2bAtD4HQVD1118YFvGeBtD3qYpXZ7kElwaS9ykPMJ3BlAug/cKWEZj2kBvG9/Km1HWHbFnDOmSfXVSncuwPSQ7obMPQNUJcg152hWX00EGcBKf3aSe3wXdv8uEGGqf%2bOKsVgaW5MDkc7pQG0FJFVlcR0VeJrmlmRyws6/6u2inSxMPmlf3KG/uruHsb%2bIqr%2bDVrwg1paGeTe3QD5b9lP20lEYRCQ00odZDggcZ3g/feULb/TtvV4s4%2b6B%2bn%2bEd7tKxHQI266Z%2bEFvny6W8Vw/Ns9OFn44TmRiHAQu0oR5M4DtVoKbtwJ0uwOsd0OJORxR474zQlhyQFcZBdzJtgONlRB%2b3sdgZRUnHl7C3iVPLCFpA0zgTimeed%2bcbJ2mbGUKlPO2iKFMeAert4R5mcXA6Y5k8oVVSkchUo6fZNYvAT0CbwL0G%2bpVEKT31xwUzgKDmxkq54D2TaB6FuisqnNzX2cFqJwB%2bquqvZSW1b32bwLFs%2bpTgP0NsuLA3HKGB654WLo/xOLFEH/66y289EcFIBigtlSUlXmC8epSHzKhNoZsuj/IljNc2ingWq0v17lvu4jn5/oysee4wz7sjRdDPPkEcKriIg0yfGItQLyEv9z50V9739283P/OwP1d3/rbx0a12Q9%2b5qee%2bhg93GVg1Rp2cYwxGna78R3hpmTkFuY1GuDO8xwWfS71V5N2t%2bn0wqyrAMimNwfATAGoeTHqsX9gJsvLz%2bkET8zqymytbGMC7u8yIhrcIX06sYaRyowZjJfgOoE7nV4I3FsKuLdu5ZAPCNwHWN8b4yG3gIcf9ZCPIrjieKCj6%2bW6%2bxHuShWokyi7QJ6uMpKQSZVOFjUxcOcPAPfpTsJ0eASxxvqRAZmm4dvHSydARx7NjNHn%2bbCl%2b%2bkxxS6ug%2b4zOvOqBLHGEgxqgDUZcTUI7CfuIHCXQZhyDJEvqLp0GHgX0Ko7BAbccnQ0Wny63kwH3k76C2tiwnvpaK0u2U52yGSgji%2b4WNkG/uiZBP/yfxqi8t4y3nElQFhWwJ06wf66i3U3QqkCeK/42M3FspzYcVzkPQ/rGwTu7j5wJ7tJF5gz2i3GOL9savtD9nZ6ua1mJDDcZ5byzAO8JoKafjuv8289aRT2fc2bTBKl7HlNzRwSvLMdig1elqKblpA2xyj6Ph75hynedaaAJy45mCmNsVn31BJx5iHndmQALxSYJnr6npTYX%2bI4HOrT%2bPLnhH3vOVWUsjbSwqxi5eGKDMJIaKQa6DI5bKLJfcL26gBIcwxv4QBw53s1%2bngu2RvZjZbXGIBvT0QNgJhmug8r8decgOofHdb18PwcNKcDvl/Xmz1E5jPdRxgQLzIsfmn9xgYIZvQ97HnNIGLORfmf9M0WsLNJkEn/rjXuyj1GDfI24z4euxgkCQISHIoTkX53oJ1mRrGPbNzDWKuem92iSsDE5ej%2bEFG3iCjRbXN3jFEpjyAaoZtQ4sd8G2TdE9SYa4OdOh00AuCm46B2ayx5kSi6iwjeWzGa2xHiHR8vbLgIV/PYkJtiMhJloyEgXpgrFxmzrwqY109ryCuNahjMKv37SQL4Q96mWXac/sowjDJHcJGOU2RcEd7hJCCPEw%2b4%2bNr3t/GON%2bfwwBkCOZJKSoCZpgzojRF61PlnE8ZdgHucikyGl23rrNVkxcUikv7uReXyYnTbXGVlBuly3pu4x8gjxjShcOSTRgWqUplJt5oEiERHEl0BzJTNQ5ih1xQRBYaOkwhzTBkpv6DNNusGAbYEgPJvbR0qchnQfY2F6opunxv7FHurOLR3PKbGFfV/ahySSYMKWDVt3LTZNFUBsYmvvOUNOOdnp5ugFraQhCoxlAHtLCc7INW0BSWHOZhwSfqwI4A7f2cYd3kuK5GT0cRzEkUyiWWViGifq8GOMO7PNz30d3poREVkvRH6zRwa20PkSy78nO0qA/jEKmsFDFbXsPzQErYvBvDTVID7TkcFwJrhZxKyod1j7DJmG%2bUmjkSaEH859XHFjyc5/szx3RWgfOHg7M/sIyvO7/o3gOJ5Daov8lMD9LVMQDiv0V1xUD6tztrdUO%2bUQL2rQbvdD/kpsL7s4x43FgDPlQGy8vLbNfXJ3zauAa18hq9/ysPc5RAzyyE%2b/bkx1n%2bdWuABZo4VkMWZsOfjxENlqafAu65y/GAbp8qC%2b64U8nihpvTv998q4kulPuYWfJyejfH2R6o4c4IOWMBfdALsnsHGs//4J9//5T8%2b2sv97wzcmTX169534cMf/adv%2bjCB%2b2iQICx4INvOjTaPpjGMxKdVs%2bdTo5Ro4cjUk1m3v2MbtJbT7O/4ijjrzqIYLZ2MibVr3omxG/vSLmf5b61/l%2basn5inNMx7K/EViGM2VGriD%2blIea15P8YOJwHatYZLzQzaYRrbZi/Bn68OsVh10fN8JM0xmMR9r5ugFLhodGJ0xsDbSyWcuRcoRBGGCcSKiwNNpeRh1N2DV1xQPu4E6t68uMyIjzufk/KY8jyS3p5YQZKxZ0fAACGzmYGPy2vsXAwQlkfXLDQPpzykSk2hDv5jwhdTNsw6bRodgTwzK8qS6oFucP8P08mZoFWb6RZHAspn9P0wKt5sooXXm5pcKItKWX2iVj2vn2saTGhpTLEcKItKDhByKuqijQPBPggwr13YdR2AKKnc6bPKQUM8tVN0hy7OHnclAcTv/FGGj/8vAzzwbTWcW3SRK4/VsmjLQ3/Dw7o7ADMHetd91Iux%2bEu7jQDXBk1h2wNZ/1QPR1BgAk9FGsNg01uKqRHCSD9zjU4wqwrMEwQc0G8dUfb27ngV8LkEyM28QIudlu91J8VD4hXreM0W3MHk615PGD0BHVxJoVvNCM0bDrK5PCqZi0vvTvGOiz7eeSVDrZxiux0KEMv7XfTjmoD9wO2gmM%2bj0x%2bizGDBwRDlYh5ZxMwaim9NCdqjugzEBpSr%2bmVTteoRWc9ktYQDusm6egj65Xk6ph5PMXs2GDcaeImXsOxVpTit4DX%2bTZBDQM9N5Dv6frhPmEvdWIz7zeQ93aUd2Z0%2bjzdSF1s7z30ELXxeI72htOXQTTNapt2a1mb%2bNm4vQpgckhRKSl1LauT5plxvuO%2bO5Fj73chBpl7HNXESJZMeZ3%2bCpNxjFHhXLKK6LoF7RJcysb5TEzDqewW4E8AnAdJRT2lpMwcxSiKjoS1k1I0Q9YrI4jEyllUvwyhJ0B2RbU4xSDz0IyWZqW8GGJ0borIVClC6QQ/uWyMB7r6rXKao2ZH7CtSkb%2b3Px3hx3UN6M0Q17%2bCGZMzKAF6L/8tc5f2eOciujOBcC4GLOpiUw%2bCkPjE5n9VeDQtJnfyyFqKzArCP4H0wJwh/e41ejvp31H8f8/DfftcYH/rGAGWfDDTJJK4kceLCzNYKNOdCWgkeZNzZ1xJo5QKCXiYTVJPzhVkGmqZKCqHrLd8dy0F8xmVirLTvMqYMEknoFHqUe2bS53O/JPIreuLCMVNVhAzlnEq3rfp7w6yT6aZ/epZfUMz51LbvLKbHv4GygOa9kM3vDlJU/T204wW9X9V243HF56p4e4hF8065DO0eb2HkHVMa%2byyRTLKUmhockEqhq0lLp2OCT1UuFBWEqj4liLars0LrxmaAOf%2bUCYeVxXyaOWe8wPRmryqrFXOVc0Qmu5FKvsSylOyplP%2bwOo1ceRd/vulhsNdDs19E0h%2bh38ihNMPYjjGCwkHg3loNxSRksL6Gkw8tYfeCj2EzxV4rlVWsCdM/1RWrjk/jCACvJD7u82M8F/u4THLUkD%2bSNwSoXAQ61xUol1Voylc0e148owqNUqPpZT6pX2tA%2bZQ6pru535EaNp37%2bW8CcnNP5ctA%2b2V1PTMZiF5VX6%2bd8bG8ykBtNVxyIkCGnp%2bt68CwAjx61cGFezzM3FPEF7/Qx1f%2bnY/xXoQTT%2bSRDDOZoFaO91Ffq%2byDd7lDNYni%2b6Djj3cyxWjNxf3FPJ6v9ZFqS%2btTyx7ef9nHPfd6YO7Bz%2bwEaNwab/z1x3/6v3/h2X92pJf7VwW4v/u9Fz78w9%2btgHvMSqWBu2HcJTsqPdtp3ajaxuHjjA5EkInw9ADMlQhq5sv%2bJEi/OIzRz/kq%2bVJfa5X1rHyenrSWAwWXiqiBN%2b4zvAHJfuXFwtBLR0Kf6yOAu34Vk/sW/aMH7HQhspx6kmBldYhmK5No/DoyVOpF1Gt9yQjHZd1GBNx/IsAjJ0Lkh5EEtua1h26SMn2z6tTiHi0f5/dxG%2bOeeu1JbZTOELMo%2b03JNGle4jSrZcAwEwypjYy26kzZsRPMSKbSqZmzSatu9nPcIANvQLx8kmG2wJDN1E2/3MMAPY/hfjI3vAeeiwF/oselK40UuPECOGj7J0F1YutITbt6eglEtaVAml03nbqZmEzFiepbTREHs3CiFs4dd/Hy7Qyf/NMMP/YDEe7/thouLrlIw6HSRkbhAeC%2bex2ic2%2b5Loqhh821g2y7sCnMVOpBWTBucuVB9RQSOLqmdO6ZaxwTeOhRDQQ4AL5tRCYjg/rPAPhkFfDOAPFNwNeMBB84WQM8/q0H5MNb46TKTKgwdlLCyq/qZXMui9fG6A7zeNPX5/D2cy7efk8GZubr9LUPK1lyr43BuIq81xUP7gIzGUnw9EgmkxJm5TJbIVBGG11UUXZ76I5UvZUVEQPddV1h/eOzst5Udeb56ecQraKuq/w36y3rsWy21EX/LZI%2b89iH9IxGuqOrpix3GqBuQLzBXTzGnghI4KzIxNRvCP4MuDfnsO9/mqUXbMo4Fmsl7A6NuvVocvv6eUwWWtHUa/DNr%2b1ESfybSaFsZn/axpGvjecwz3i3wWOyqmf6cZMpVVv02s9q%2biO5H36hM6eW8wmafeXnfgC4i/2gi%2bGwh9B30U1r8LgykxGslhGU2mhuBdIuey0N3gsOWttj9c4GHnqJh3yQojfykQtSNFdDDM9HKN8O5XqOpv85gd5ZHcr15FGY5%2bFkIHZ83eYYq1sF5Hc6uHbTQ3Ijh1oReIUMDQvn/hi4Rk9ugCFXTuyp5XRKaNS4DueVANl5BreqEnE2Q2QnR2pw0oy9c8pD9mqsNSI6eMVJ4Fyo4gNv7%2bLEPSne/7YAV0642GlSFkV2PcVgXELg9AR8Mys346nm6PTGpfpQadGpCe/24wlwJzDm1vqbPBb8N39rwPnknWkyQAB3Sem/jXyG/1bOMgqociK0tTsSZp4BkTMVR8Z/lsm0NSp16EUuXRp3OEcFkBJQi51sMdMWweqAYLSLrLAkeURcmSWpTYVtAvnxNoa5JeXR7u8KmOeIIhp2bxetZAFk4Udk4ZMUFXcXnYTONEo6w/5gn3nX70c3KwHxAtqZxXU/wt8mPgxol9UBfW8HvidwHSSyQtAnaaUTR5nnOHCs7tuZMFAmrzpujRMBgnbuG44VcKeVaruX4oWbAdqdHrZ6eTBZ5bAToHUo4%2b5IgOr2F/akX1x%2bZAHbZ31h3Fc3U8E5MnndhxHorwDFc2qfSFgucqVJ4YnODaByXuGvyUaSxTDseqjqbQBVSlhuAuUzrGtqhaa/cbSpBI8jk876UyUj/6q6AtsmXWQIzpk3x4AiG0baC9a8T0loz7n2eaDLyQQ/V9RjFs4Bm89keOxtHpbv83DvIwW8cD3BZ3%2bui4jpEUpAeaaAjJMlWZVyVPbepYF8tjcKqJ7syyoXJ6z3FvN4caaPZNWFs5ziyq0i/szr49gpB299o4cnL%2bZwLhzjD4cFbEXAF/6v3//g5//T0V7u/3WAe9FTgalG327e3l1kKNJfU7/I31VUQOu0t7sEWmrNOycDbFh8AL4EBjHdqKt/U/JA708JvtEz3Xig2HwJXM2U1zu17excmHFVXraeVLzGbco5KbXpOL5o%2bVpdLvkl%2bOL6EGk5RFpnEhAXndt5NGo9jAYpQtfFczdTvOuBHB484QtwZ2pqAnfeJ4F7MdtD11lAteRg3NWeSUI7ShegKC/aUJZmkQ0b6A/3ZQ1SfiYxCjtAepezM9D0tyFeTYS3CU5jAKhJzW41szv%2bKUFKFni3D5gAov1s4JOvjypLeSI2eiPN0dH9TILCjb7raoFXvWMjneF3k0BD1UuLltCWx5hzS9Cpxo%2bvVdE54DAo%2bPwxF8%2btZ/jdz/n42Y90cf8HK7i44Alwl4sNQwkqXccQ1QKwfV1bD3o%2btjZa8H0PAZeBNMve29Le7Lc8FYgYqMh/R4IatJxAXFI9vHntNp45dwxeliiwzY7xkAksq4Ow5QTla4o1NyA9WSdTp4p/AtD5b4J4s39D/9sG7mw35prWxFnOz/vQQXRGPiPxIiMgqRWQjUe4940O3vZADu%2b7L5X624kCNTj3esgXSxNtaK/dw2xNMXyTkYAvadiViRtBewld9J0KnHFXxGJF%2bmiTZbFXhbSLCvcZqdNkwNN1xEw0bU38dMXmK%2bEyvCzVWyBzugIfVY8njL12s2FwK%2bU5BsgbsG8PwmKJqYH9RKJirYxItdaDngEOtrPMNIN%2bWLs1tpG2P7wJOKX0htu0UwyvObGbfA3LR/uaE5BuRlDr1U6O00H1VJcc%2bFprdqU/mgLu7JMHMX2rySLuB8hJUiadgCaKPZHLqDh0B3FWQoQesnEJ/dZApDODThG9NEEQpeIKFRUKCPoRuqMAIcH70EfOS7HmZqhthuKTfWuui%2bVOCZTRljeHiC6o2eFZF7hJGchOjLlTahwhuO%2b3Uqxt50QOGV0bi3Y4ejkvAfY37Q6WcjlKiSSeJMNjURlfCHsA2fVxhmPHQunmtzYisjNsEJIAzZmn5guonBjj8sMeHrk6xBvu9bE4m6HgOwj9EFE0UkYLKYE7UC0nAs4LuRzGMZ1jyHgziHEfuDPTNeugkcoYlpntQuRtOVckGDaAVR7rBy0UzfjTbieolL1J8iYjaeT31MzzOhIMbQWMEyTfbirZjdn6InshaCfZ56Gm9erEAAw8lSRK4iqWYibcRSfVmVGlGlgshpA/KnWysZFkdnJOEtgO6WEvyafyGboR%2b2Y1AVDZYTXrzrFPEj/tA3R7pY6n5/fGq908gwoi3Q/ONIYRpv5P3Gakbbji0DPpwzS5JnaUOjDVlLEKcM1EvmIysBK0812zbQ9GLkajDF%2b%2b5SLuRWh3QgwGfdzeKaGzrX3cqXF/tY%2bQDmy%2bg9bNEMceTHDr83twaFn49tPYDiLJeLrTS4V4NCvIMpZqFMyP3poGu6cs1dfU2HJAZ%2bM6As5FzkJ5isYtshqiWe/aJaBNuYyRsazus%2baySq0Lin7ya%2bd9nH41lhUps3/1nI8zKzpwRh9rCAfWspwDPB8DFxlca4Ko9XGMGaHjTNQGti/n8TVnO3j3EzO4njr4k/%2b7LaYMpTmgslBEMlKTZF6czHtjrYzqEu0hCeRV4KrYfXPezTxuCXB/OY%2b/bPQRzwDFso%2bnzsV442MFPLCQ4rfreSzdB/yLt33xBxrPPX6kJeRr4ZnDxoQD%2b978DT9/7N3/zbt/%2boe//ew3CePORC2aKc3lj9amH3ZiAeaU2LD06QTDYFObfNRWSsOBysJqfOFHEa27FChv0%2bOXwXTsGXOK4ZdlV90RUI7Y0NKZ%2bSDGjY6PuZIRut2Jk3j5aZbWjLGSyU8D95vDBKsrQ6SlUPTOSXuM7nYerbkegufyuDnTlyW4t96Xw4PH7wTuEs2vr9TqOQJ%2buGRZLXlIBg3pOD2uc7FoepRjUCajlm/3O4IMfacGT/TAKqCIgJYDkWyaySCgqZHF0G4qr/WS%2bbwER2QvDWPJ34rcRH8eYCv1tfghHdwhWlsOxvytiWvgAMd3KuCMg%2bVULLIKNFTLhHwQk/RJBaPuZ4E1IEJcBwwQMI3cNEzrgU1Dl34mA47PuXjhlo9PPZPiZ36g95rAfZcavJKLvudhc6Mj2RyNKwwTt3S22LtCglI7mz6eWt3C584dlwFC4in0nCwl4%2bw6yFYz%2bGcUshPgTXBOFuGcZtLP6f2n9h8i2VTH8XgB8wTp7EQ3rL9P7wN5A%2bInnwbssxNbV22Pv5eN%2b3i%2bk/sMrqlL7NzGewmykyHue1wB93deTFEqcqBQ3owCBksl9LtdzJRT9JOq1GWy7wTlk9oro5iDdEw6oyxA3szQzHF2Z2XAK4tQSZ2A9kix7zIZ1Kc2si/uk7o2dRLpzDnw6tUe3g9lc1XN8sv9HYHauZvM%2bX4Arb5lyZXAyaeyppx2vZHfaCta00ZsXT332Yz8UatZNoNkasNrkQ7mejIROMS3/rBJAa9zx5xmeqcpV%2bsElBtRUsSNExqzIja5bz1gy8qBCRbnwRq0DMeabXdcDJNkkqyJ9pD9sQL0DCjt9CJpdx1mMvYplSkhyjpAUkGvTfAODLoFJL0x6l1meSbR4glo7w5DhEGCHmUzPvX0wFqSCZHDdlzaCSUBkyTfUWtukyqxX391U9GyN3rE99opmlt99NYDVArA9Woe0bNDBYB0YVISmzHPA/t2hS2F%2baWd44iSivtCnF/K48zxLpyKj3OXMlTCMQrVAmZL1KqrDKckrfhbBpjyk301wcJ47KBSZrBtTtywqOknaM8H3iQ4VI5LM7FnZLkIQNf9tdie5pV3uwHujCHqdEbCqtub6ccnAF/caBQbb9o447bagxjHqj522jSNSASYS1ImJlYzdYUrwTKf8FTQrSZvBAhzZVX%2bzoSppoGDmC/0YgHP/C7u7MKvLSFubcOrLiGImGRpAamelSjbZfWclHHy%2bXge%2br3b2nZq3ollzD7WN5s04srB3dqbYdxlLLIkMlLFxQIzEYks79n2bze/I7s%2bMZOwxnnyHOZ4YhCRyoTAaJhJfgJaY8Zxgs09JkfysbHlFMtZAAAgAElEQVQd43Y9QdLJ7TPu4irDdsPMqdoO8lYBSesW3ChF94mTCApjUBNe76cISUZQgqLHK/Puee9kzV%2bKfZxcTVA4TblJhiJJIrLnZOaNRv0s67cCIYNNgvIM3XWgcklp2eWV6AYmj6vdWcy1BMZw9f%2byYsglLsVMEPid1SFyAUask7WagCsG1wjU6RgFgEozblco0dYXmHRhOiHuuAf08xkuLHj4B99ewG7g4pM/38Ros4L%2bWoTccoIiAynTRNWRRIF05impLvbR3CyhcqKnKwnVFMrbnRPhOMlwH4p4ttzDG887ePtTBTx5PMUXoxDuFRf/4SO3Pv4HP3bqSEvIrxJwf%2bdP//C3X1DAfciHUKUfcLZ8xKr/gVZvmrZm3M1a7F2BO2dNTOikXWyY5Enea19p2qltd3XCJ5npcEKggSuBO2eS7AiaPWC%2bsp9G2jRGc9tLvtLLT4MG/m0D904/wZfWhsgqIVLaQTIp0XYer3htnNwoYXW2j2YbeOpqDvct%2bSiMI5UKV1gNlXJazeI9ST7jlOYlOyoras%2bdRynlPgXcs0FTltWYoEb00KZRS7BXjAIDNOnNW5xFEDXQY8puPQFhZT5cLnKHrGzSKRngboD29LsTNl7bFfNKEi%2bgSVoCKdFk6o5yGgCYWbC0U3ZmWu9JIG/HGrD/V97eanojMiitlRWtpPSG6s6kDXNpzgLuBhjY92F%2bw9%2bb8hfg/jcA%2b1N/roH7hyq4OOsh9XXzHgbo3PKwkSnGncC9UPLw0s22ZAz%2b/5h7E2BZ07M87Pn33vvs5%2b73zowGaUYajfYZkJCQZCFbCIHYHDshCsS4EsdVdsUQBNhO4iWUbEMZnDJJjJ2YIiIujB0olqJcQBCLwUIgCSFpRqOZe8%2b996x9zum9%2b%2b9/S573/b7uv/ueK8mFoNJV93af7r///pdveb7nfd7nZREXTvgSTTjxZGn/lbdP8O8f2Z63IU46JvAuxyus9qPmmQDcAG9%2bRvA9B9HmwgtQZ0a8AdwC0K8D6f7izvhXgfT%2bxX/LZ0bvXn7mhZUFwEvmNxkC5G9RVmNZeItcyPp/jokiGYqdEK98g4M/89oIz17P0WyGOO9OtICLRJNyAe82T6LiDjBOW4icgUQ5aOk2GU9Qq9cwHk1QjXIUQRuI%2b0DUQk4QvzwuL02Y0v7sIjI0eQymTViJCReZBIjlh/2MQIcPLmjZXnmjqJ3nPufSEbvIWmn8XyzxVKQpTLxeqQ5cBvzSji24NZOXleFYS0vt%2bPrj5Qj00uGYznVReHh%2b%2bBazmI3K/eZBdL56subvC1YMjDDwbXqfSxTMVGzmN2RRYjSdqzkUVo5juYWlsYzAnXpqgnRPX8917jMtKOd5HvrDieizz6esWlwgcHP0WJCJY%2beA0c8c424NEycVX3cmVZJc6U18AeuDqSdOM9NpiNtFgpcHPu4VmQCD%2bmGEvc0ebnRby1feVZCsl9FFeztFLiJ0fYy6vjDx3RMtlnMQB5gekd3Uz%2bmaJAqx5/u4s1nBzfNY2sDeWoQszbDTqOORqwNEzQAbOzFe/rJA7P%2bqQYp2jQsUvaZsfyymJKwxK5/y2Vg9Mkxfr6UI/Ujsa6uhAnfON9YKkqBZ3qM9I5NTTWVUIRHlNWU2piCRAfT0NC%2b3e1soifKRaujLIofyG2HLKZ0JgZO%2bttqW05VKp%2bNxgmbdVGwlicREVAPcLRtP4L7md9BNt%2bCxNsS0wFpIJxhl21sefdM35TMiXH/WQT/ZRKPBaqvJXHtOQE9tOo%2bbkW3KZgbplty7hnOKItzGcDJDg3VmCKwyB03/BN3ZNmqRKY5n27NhdSV3iwsdMwdJ5OwCgmouAzOLZNs%2bLDgnx8%2bowaqEhn%2bPRhxLmcdVkuJweCols9oK8WwPZN2JSfKMGvdUCiftdzwcHmc4Oc8w60Wot4DzowQhi2QaH3ffAPfjT5zCZ7LWFNh55Rru7ngCcnuTHPEBXWu0vVOiQucVabBcdJqxOboB9CmHoasLtevXDFBnNM0kjdaoUWdTYNTAsu57BoQbaZIkpd42gCUrMe1loF6y7F4ZpZbwDa/j51Lg5SZ10hKxfO8VvGYm%2bsldfz437xkyh/Ul4roC93d8fYhhI8BH/68B9v%2bwhvRkiuhWhnqTchldwclYMGfem2hfGqF3WBf5TO9eFa3LRjpDFV2tgo%2bejHG1X4P/thjf/Lo6vvqVMX6lEyK55uKX/ofjX/iN//XSe1fPzf79ZQLu7zDAncWIFsCdjLiExL8UGkjHv7lrij3A8gpMEljJtjsQf3hWY2UHIBBnQirtIPk3rSHFiqjmi/RGKqsWPnZdZfPJplAeQ69Ou4rj7/E7kpyaLxJR%2bf4q0OXpUCozdPw5485kEEplSEm7vRnOHQfdSYY8zUUvWPFdfGw/xX/6xgqe3PbgVX243TGSXAdGBamEcwrravkZXMZj4CKbdOf3j%2bIRWaF7m3DjroTYBCjKxK8JQ7kB7PwSdeRnw0ISTK08ptwYOMiTjXwgKVEaoZlkHtZ6zFQmjKWR0RD4lBl9dlIOO8LUW/RAxrVKXV8mx8fHjMdeAgTWG1aBjxZ6YliXjJmEJukAwQqw1MiblbUNkJYXGLy/BG3MbeAvUadrowAW6DOSze2oE7y07uLzRwV%2b/rd9/G/fP8TL39rGU1%2bRYdjw4dfYk1UqQ%2bDO6nfUuFfrLiYB9e19sVrj/SBLR9tHWsbx7iyq/a0skHjsXFgadn0O1AmaD0oAmgCerLkF6QT7BOv22YB2z8hmeI3mr3kI9u87ejP9K8tAX7a1n5VAP5l2Htv8wYHaLC64AEg6GYrdEC9/nYNveGOI115lie8Q3f5UrjMXYALerT5EDkXZh1aTjLyL8WiKOuPIbMOjsbR/soMC9KUNlmKg84FhuW0KLDCFkewmBOoPG%2bC4PdukHZqEpV8EpmQXVh5mxyBpX0YrT0ZeJGIrSbHCwhOoG017ueuUSery%2bzbszv3bRFfRvRNIGccbbi/6eBahMjp5C%2bptAuxS%2bP4L9Fnuu15fzhtZ3Zy/U9NbsriIpRXDqi6/PH7Y/fN5Ke/E3EqbGM/z5UK9aeR65UXEdOZK%2bXYFPg4mrA/CiCxdOeYJqi5m8Riz3BXgPmURtZRF6Rh5JKPrSnVUMu5%2bxPLtNfQ6WqBpGGfCVBOMTMMIo7MMw2kggNhnFVOp5prjZC/E7qMznOwFGN%2bIUb8bYXRdn6Xfcq64nuDkdoj1qwlqASPOgNsI0Dbtq11lHojqk%2bzi1RIW/J0uS6GHwOmpat9Z1I3l4FsbVazXUpEvEVxzjqCTmWpqcyEvmJdQ9ReuMIwAs02yzzFJt1lLRdMeBaGwfBstflelatabneDdmiSwv6m2nZIvSlb1fKSuhlQ1VWcVAmNxCpM%2bo2dDlxWO0dJfyFQXDmpCnmnD0SRqur/wvqqcR2qPcIElyeBKaZfXhcK2G1xA4C6vLQfvso3kGFPCwnGexhZcNBlJi00a5XvWylHB9WJUWFp4syosctSNUoBSh1qVmviFtGcyU0qPun%2bSfOyjjKTzIQ44pTlOXhpirdPN0OK1MV3KJp2u2kBaoD8a57LwKPvBL4N7V%2bZ79gkuYKcxbVFzBdeZi/NxiNuHY3R7HvY7GTpnBdZo1nUW4PQ4kXyDReVUwI1cDA5qSM7viwRy%2b5UbmNWrOK3GGEwKJEcFmmS6jabcHguTTePPAy/kwCOMIJVYc7FcvKriIxbls4mf/T1l6alVF/zFG25MfqyGne8zEVwelkV92GBeikZwjv9cAbycDHsOPG4SoMmwv4x97Z6P1lV1H7RkvcqogKoLfDpTkB9TPjYFsnVgHQXe8a01rF8P8DM/M0PxiQnOn/NQfzxDtVFFLmJ%2bRe4Cd1PtA5TMDI5qaG6PhaBaks6gAG3EB80cO5sO3vs2H09sh2g2XPSuefiXH%2bx9opl85N0/9%2bPfcHTRUP5lAO4f3rXJqUwQ5YDC5FQCZp4OWfG5XnOVfS8xxXYgs4mponenD7zpjHOXGgJ201HpWGPvO8F6J1fHF/4uCy/ZPiTbeMBpqh2bP8vtVqt22TZiWfeLmGkVaug%2blhj3SYaP3YsxGRToM1GxBrTOK7jtDTDscWIB/sNhiv/m8SauPp7DG8y0EiALVZQ83Os4xQDb4PMQm6ihCw5lI3cdDZxihE3Ruot2fdqVUDF1cPZcqG2ndEjssVhQI9IYNI%2bZf19AlqlLgNEKy8DH1yXpQLnh2IFuznBGwMCwkxIdmC3ADCdo2U%2bJieBxkJGXkJfpmPx9vsfFBe%2b/SClYLIpuBATt1LubSIGcEwf7ki6N78l9LQF4gjLJ4mfY1bxPr1u2DU4gZUmA9fcn03N918XnDgr8xu8BP/Q9Uzzx9jaeejzFkK4IZBvOUpxmEe4jlgSmoxc1OTXshnhu0hMmg/didOLDDbTC6APX3PY6TvwlTboAAcOwy7OVt1jZS4lVLzPq8pognyz8XWOROAe9CuDzEvh2uZ1JXOXvy%2bRrIhgC6MnUm2OUY%2bC2Bthb0M7r7V8GZkc51q418NjbMrzjEQ%2bvvV5gjcCdjYKTGSMndgG4GN90PM5drDUyjOdU%2bMIdiGOGhOojk6BcAo1LjPMKEy6yQsPAsy1KeNtoVu0i1TrQ3DkDbq5DynXf3FDp1nzfJfeXMiNPEoB/2/D9Kvu9WGxcNNwu3vtSuQz7O%2bW9WRbfAvbVZFeFRyYBkImwpYqx8plhD4UxJAkwUiDP/XHcKj9kWxPtLX9mk75lW0kWXwbp9hj5sRRasgOvGTvZ39lfy2Os3UbycJwCBO%2bLxFX1uWbfIhMmEceE2lvKaDxksxEmmSvAm240oV%2bgk%2bRw0zpG/RhBQFDjYjKoYJylCHwH2VCrUB5lIaLpFMPE00RYEjujAEGgAFOOZyXiw%2bN6Ictxy3HnSYy0DiST3Q4TpGkBtx2q5Mr0xXaL7LM6TVRChZ8c5xiR4lzAX6F8x65xF6y3kkoVh7DSgGqy6tQ0V4BQyiKP4YU1XTgwkkvgbqQyEaUyaUkqE3rKzBvGmPuxLDy/S%2bZetfIE1nq80q9MwxBwb5JSh1KUSIknMtZkemXBS2DLmWt6gl6%2bLp8pOVUeeblwNxaMAshZHfUIaeWyOL2k0a7O1bMO8soOgtkRBsWWUluugzA5QS/bMH8b9ruUA7U6b/GXRZ/PXIjeMfzWtiblxieYBrto%2bUfokWWX66ILC3s9bDuXQkmUgJkFh12IlRfNrAIrIN5ihVIirgXstjvoImYxfwm5NmayLws/KXCXiLKR6ZAgZC4A/dvp7MP2ykXPLOVr1%2bT1MSEyE//14SzEUWeCg/0cnaMa%2biczWRiSWZ8z7ow%2b3Qnh1z0k5/soUg/br9kABhkOrvnoTQqkB4VgKOvOIv3SnN9LBMqBgt35QxqqAbLmTRtVm29TUgsQ5DPZlUy%2b5BsaGr%2b352PjRqrYfXXQLE2svC9kzIVZF4DuoXVFAefI5JdJEcHSIc4JPPMe4QhB//Y9H40bqejS%2b6ygug289esD1G5U8Lk/ijF4aYqX/o0L77E6QmcochnBRQaUMPJW3xmjf1BH69IEvcMa2jtj9A7qqG/TsslF4Shwf2xWxWevxPjzT/t41WMegkvAYT3AT/zz5Pblz/3Esz/3U9/1pwfcKZWx2iwBBOaclqQvTLA3LjFkzq22wm4jwH2i/uq2u9vKqPyboJ4PKZpkkk236Nmem6JKZNcL/cy2A27fSGKMAlacs60JqMcxhqwIwc8n%2bvqiFQ2bAaUztIRcBe79sQJ3pxnCP5/BrzoYdiq44/Yx7XmiPTse5/jWxyrYuuRgkrpYS6YL4D7vBgTyjgHu22i4XUmaaVQLjLAO1%2bjXdXJbaER0Is0xctYQxmcYeBtYwzkGdJ0xbisXnZMN2THD35ZxtwBHkgUN%2bLYWdBeFA%2b39saynHbD4uwK%2bzOTF98mwtY1nL/%2bmbn4uYzHMva24J/s1jPsD/vM2EbZUSOmihQnZJl4ranrLUwZZdjlPk4Rn5TzXtxW4/z8fBf7x9yZ45dsb2Lruor6RSaGT1lmCj/QcrDUB9wUPYQ0YVDKEvRDPTXvCuHuhh1d9rIOPPrq97BBjHV8eLYFhMu0E0kbWYsF6WfqyBJbLEpgSWyGNl8yBXZWyeiCBvmHR5XM70q4soOdsu6krwmMQoF%2b2YrXgnoy7ZfXJ/lUTVK408danHTz7bIAndhKZ%2bDtdlRIw/G3D8tT6zquAznW0nOBd1MQ2sgnKaKJ6A%2bMhJTP0ig40RXlefEnZ%2bLL7iZya2Baq2LdaIVuvrZ3/d4YGmM/M63XgThe4ySp2Zps758CN9dK8YxoLv3%2bbAH%2bjlEht%2boW0z9VOZdtw6fui/zVt2d6n8uRVfu8LzE0PTDqS%2bGq08tbBxvrRl4G0LIRL7b8sY7GsvWX4l66rscW0zP88MmD818Wz3Eye8/G%2bNDGWXy6xhXZRUZIulYF9LIBdL%2bAq4y4Fm8p%2b7pTP5D4SOswEBPNk3HPxViaI70rmfwOj8xh%2bROBfoHscIAuoB3bRO57JtaFchtuzrfE3%2bzMmmesCojcJmTm1dGYaPXFANl3sKKkD508xP2SzIkWGtlgMil7OmYOtjURYczciAFebRQF9tL2NAkTMljMAOTSSEWHWmarF9k5JDCsYh5lILK0rDI9dKp4GCbywijTTz5nQ3agViBMuFiJ5P8sdcdDhdaITidWzc1FAgM6%2bSRBvrRDl9wnSDXifywF4ugRadVeKE7HgUpm55nkxiixVUquB%2bKnzErFyaRKqDaMfHxlLRh2MOGaMWGSNPXZO6DkYTSipCYScclhoiblBAvg8jMYpmg8khVrqzvZ%2bO9ixsOExxu7OnEgk0KpJou1icSX9VAoyaYyU/1lPcrtal6HQEB3cxoJ4yxTOU8oeom1Xok1PUnT6UjBw4dnOiCWdasoRaG5OOW5LiExq8s1C1ixmOX9TNpak6Vwqc%2beEi4wQz9%2be4YxSpXGAfmeGqObAY3LqSxOEFWrcjY/7vSqS3j4KBMgGGa68eh13r/qIOsB%2bLxN3GTtWlXXmdghc6iEZME8QXV31XjBGzAlbIwWSfZmCVQLIOXda8r1M1rCvHnjidta/p9IDjsmsRj7a5wInl3m7ebnAuQHzfXF203tIcE8vdjs9cgFA4G%2bVItMxMA0KvO4rgCff28L%2b8zN88h7w%2bR8Ebr3Th%2bcPkdGkgQvhdTIkC727nYB00WtcZ7anksfS26%2bLdGZ05mCyk%2bHdr6rhK98E7G478NYD/J%2b/luHj//CHXv3Zj33wDy8aUr%2bsjPskc8RXm8DdVsyyP8rBgd6h9oKUHWRYaZUP3o9QdHE6EQtwX4mbzcGX6d9sS5TK8EFrR1v5lN1129fiS/NJwbKIdhI14GHOJFimyhy0JDdwUJnGGHGELM2q7Eg8Npuc2h1n2DuOcRKGcM9jRDUXg9MIeWeCFyoZvMjFyacdfNvbAmxfcjBNHawnMeKcVeSE/wemHaC6bRgOgvczjLxtKT4jh1JbB8bn5po4GGENDXQxdNfQRBcjV0E7k1EJSLmhaHtt9kWpBSwxYKVS7MKwmQnVuk/wa9yHgN8V1nS1UVkrScvImTltoYEv2/lZPXxJCSGTiPGRtxOF1bLbzrU6g/K2yoKAIfcSGOA9Evs6jxrOxbe4zWppaRmjudpec7F3WuB3fr/AD/7NGJfe1MATNwNUDXBvnjGHooL9YorgJYeVxXF26qFZ9fGZ0Tmi0MP42NeqihLqz5VVL9sxlmQvq0C9LGF5gCkn%2b33HhI4NGy%2bOMlbictMAdTvA2oZtwTbB%2bAVA0w4w8lxe3Vw0Ytj3OHFNgDxK4F9t4q2vcfB1bwaubGmFyyEnawmv66QohVcKlUVYRlHaRu6K1/skbaPqDzCibaQ71NCiWBdmmM4WvGwlyjCZMumNJdMVEAgQJdgTJKn64axwUA91QuQpH7NAG%2bUhJpTLaA/B%2b421xTO32zOqtOtrwO1T4DrVaqUH2w2B/PV1IzG7YAS19qn8GvuhBQBLmnmzzwsnvXk8/SE3YEVLa4tJWavJ1URXy37LuMpdGuDNl/wuHzbB1hItZjMp7ELgPpcsCpWvLHoZrF8UySufhnjpm%2bRh7oLXRcLh5VM0i/BpovdyLhuICaY1UZWuNOLUSJ2v2EJqVGWWBUhnI3XZ4DX36vDzMc44ESR1TLpTeKEjzLu1iMzI1QwLjJJMIqLnYw%2bVdohiOBMwQ2FDfxrC9zOcDUNstezNtBpBbdfMU1rfUAmKtL%2bkQKUaYZYwiT4WH2eCXLp%2btJj3YZhcMWqiVaNhoxktJVC3UZtqE0iZTBplshCpB2rbKG4vxs6R01KSeqj7M/gGoPN4aj4lLwVmBO4RZTLWx71YAu42QkWw3zDgnd9n/o6w7sKeU1aqGnA9w0LKvddWtO62PagEhwWNaA5Bn/QOssqOyvWSY2TBtumH5SJIKidczPcOvNkJisqOAFvefys31KJESg4uSzw9VPIOJr4uDqrpCaau2jvOKeuMNVI6cJs7IvdR2Q8rftOlzhFLyF6yKTU6uDAgR9vg%2bY9SNA1oLudeWUbeRiTYFrU4lNbpYDsdjlI0aDJhDkNIhqleSQvceU6SxHrheS0OX%2bwjq0zKVeAuGvexSr7iGe%2btOs6keYGXDrkgDbHfGeHufeo/DHCvaOXUI9G4K3Dv3gkR1Dwk3fuAG6IYZ9h91QbuXnHhdxwc9rWPyILVaExshNt2YYvP57zQRc4eX2hOsQx%2bCjxChZW1rb7rY%2b16is/lwGME1nYac1ng0kP7Wob%2bfQ%2bty5nM9QTmzSsZxocODq8UuLKvX6pfI3h3wCKH/fuORvvIju9mMjf17/toX0vRo5zmispp2HfP7hV4/BvrePoNLs46OToHOX7/xxzc3BnjdAdoDBvwgiFqm1Xk9JcsrWJlDMz4G2P09htobKtdpC77XcyGwH0vx7teC7zlzTVcnSXwHq/hpz%2bZ43e/7%2b987bPvfM8nf%2bpHnn2Adf%2byAHdbgImGH9MxmQTN/D7JfOz6KY4yH9uuDjpBqSCTSDjo%2bGISRzlgURc/B2r8jOC9RBYa3Ci3Xxo7yKqoewwLKnUzlcvIPbGyGJMsiE4MZyuShNQ1U5HNhh653w0/xTnlNGbhT8A%2brCzYd0tYykUzkw4tHc/79JHPcPs4RscP4fU0ObV3EmG8McW9oxTePQ8nU%2bBb3hxgd8fBNHdQGcXwwwJRJH6AcjFGkxzVoofa%2bqa4ytTdLkbO5pxplxOrWebdsIoSRtPiQ2SjhqLzvLiHlAE7t1DQo2y7%2bOpatUJJv85Jogzcl8CGlUGYn%2bNpUKZCIM1FA6Uq7L/lok5lCz%2b5pqYdsEIb9ZwWuItjDbXs9HungNUSfCvnZvexlIxqNrbnZ%2b%2bZBST26uiu5OKLr/XVLVeSej72hwX%2b9vdMsfumBp68FaC6rox7vZuik1Ww70wRveShXyfbHuCFSVfYdobuA4YejxzRuYsrC4E7deGlZNJVwF5m1YXRpuRFGnnpPuph6sN2BNsoV99bPVELyE1y3FLrWB1gv9iAK0I%2boBhmyJ%2bo4mrm4PGnXbz3zcD6ZoQK8/TzXJg/AvfugAXGrDZXWfjeWAuAZSb1X%2b2zHHGb0b6r1EcZ/C2FOQk6Qw3nEbQbfsxIodTNhg9%2bVq9kmMTG2znMpfYC2XaCdAJ3thvmTJB1f2QduG3el9M0%2b7ln5DR37WfGBcQucu31nIfOL1ojGQnP/P5Z2RiLf5TkW%2bW1E2%2b3uOWsVDJeYrcuqpBqnG14PKI5py7eyFmW%2brjZkUQFSgyGMIkrWvqyO04p2LcYbJc71VITk0mdMgPj7jNPRl35jmznFpjEWnl4OMvQjnzVuWcZZiXgPmKCKv2YyXkIcO8j99qoMOnZbWAWT3A8YSE3ClYbGJ5PEUSF9M/T%2bxGyUF9jlMvvcOykZKU3ZgG1xaJC5G40Mhhr9EfqkDhAb8PBjSELuBQoah5qUWXuQpKmrFcwhRs5kG9RvpKyTohKYxS852jUImR5Jkw390t5RO53kU83ZF%2bVuoPIZ3seIPJquh%2b6wIS52v9FtPX00Apm8EJKYjjukmlnn2Myao5KGIo0homW/Jx6dsu4W%2bBeNY4qZXmIjXwqOHUxGKdzprkWeWJ5uYjCOJIAygdBqkpxjN6dCZgTgldfACc7bS1y4UxOkETbMpb4CSUyu7pdhaEPmi%2boxzkdX6riyU7pjLLVZe33oqHRmctFNe1gGmyrFp4sgcxpjsh4RL%2buaEqHUsu2FwWqQiwuLCElCisLF50leP7cnvp2yowI0GWsMttxXOMcyuOej9MampHzmNevMe54o8myTIakJ5NRLz63kgmFzPceZrNU2iVdZSj5ogWkSPCdAqO4htPeEIdnEYZnfXx6P4I3C9HvMFnbMO4l4C6VU%2b%2bE8OoVzI7uIptCgfslF/6ZI3adbDPlnMByB%2bfCnF1JnFvIWC/1/tIf5nrM31mZyy34t/pz/i3SGbPd2T0fa5dTfL4AHo8gdVHImsu1Nex765re29GhAwbuWpcLPFcAlw8cYmiZUzauUXPvYP9qjkt3fdTtPnhg5rd69320LqXo7Bd47es9PPLnakg7Ge51gd/8QeDRa2OcXQaaowa8cIiUtsIE70srOyMXSjw0L4/Ru98wXu8a3ctiF4f3gde828HXvClA3c1x42VV/PQncnz6n/zkB27dCn/55378L/7JAvfT1JFGRCvGOVAyN%2bo483GpofIY7TYK4il5sSt1%2bbvklSrYgwOzYdUlvEGA7mgYidaPBLdMKG07qq1jFVQOulbSwVXp%2bXihc%2bYOLOtkJ2WyC3KtTSGnTTJz/LFODGwpcHcI%2brcj9E21RB6bVvHTcOb5IMPeSYzjIEQ4iHHuuqj3I%2by5Q0ye9%2bBUgdMB8E1fGUg4JC4D9woLQDHBRsOlTAri6l/KvFe3lHl3NqUM/Jx1J/s%2b7cLxVArDJE0Nt2a3vGAAACAASURBVJGt0uN6YB4tdZKym8MXWr3xGtnKjATvc4BfTvQs9culZJ/y%2b2aQLBd1Iliy91iAPsGJAUTyviWALyjDzu2ZCGsL8EjhQnMiq9EEuT4rjiKLS1FgFqwhys4FLFzedHE2KPA7n3Hx3/9AgPVN4OlnXFTWMinZXOvmGLw0wEs366i%2b5GFQz1AxMhn6FMtAeuzBDTXkbn3QJdHUsuRGq2516uWQ6APjnQXuZdnKwwZFc43t7yxpxL4YGP9C%2b1z9zOoXexmKJyu4mgGPvdbH%2b94CbLYIKhycDDNs0sWBCYPiKQ2c9/TZ1ldgW2lKsZYuXHcDScqcjTXjgatM/JJ0o4Tc7cBuD42OGTZtbaFqKDCZEVARuCudS8DDF2O%2bH%2br7qqVfEakUwPEQ2GosTp6LSAJ3svFk6/lM73GZvAluyhaSK2us8iXkAoHaej5sHQOb3M33JJG85HJjF8F0uuFieO5%2bYzzouQAqXyfbbziZWdmFBd0PWc/L2HdRf3tgDDEyl/L5LC0ibNTS7MyuNS3bXl7QLzHu5sBE1y7SthSzmelPFzDuPF4dw9TTfZr6SGcDAd%2bp1wLSIWa5L/KXNKtjhIEw78Me9e4E7AVGXfowJ8iYZzTINaF8QmaRyX1UXBcYXfNw/TyRv3lKntQYKdBKYgyIdsAE%2b4okflITK1rvOmt0OKjlOYpqqD7oZG6zHG49lImd7DxtU1nAhUXJWHUzc89RTNeRc6AJu9JP6vQ%2bT7QPUdaUZRmqXl0rZaaFuOPUAmrqIVKZiPtw2vIdWkHS/z4KWSHWsPVSIZemCgTPtDvU/ljjNTBkobRlRsqss4zYJnJhbQXkhcx5dC8ja21GcUGoZK5J3M0XADWVzDRrPujNTnDKNkFtP%2bc5SWLVWcDo2U%2bQV3ZF6049Ox92PJdIi1uo7ttVuYM%2bSnSe64lhQzY%2bwszdMsx5hjA/hV9Xpl/AutUlGYKvLqCdcqfFOCDjglnQUJY64qJCnGc0uVfag5VVlDoEtefKztvDWxQStBFAKVhFK8tS1MBGD0YjJvgv%2b8LbayD5aKyY6tHS1NSwMQWZyLqTIebxTdMC3b6H85mDu/szHB1k6J3XMGKNGSuVuT2RxReTQM9vhyIlS7oHcD0feeogauyi9qSLk2mCgz7b3QU5cqbfiisLte5USsiAuLgz8%2bvw0MFHB43%2bPWW8GTidj0UO8CIj4cdaoJCsOl/wOvaPGG7TyC7BuUhgxGPZcK92zqTEymCI5o0Mo/v0GiVuUhG%2bWDSKREp/lfeGH6xdK9B50UcRJbh2C3j7N1ZFej3rJvjID4/ROalj/XEH7Ro99EnYjZBOc9Q22HnsWZeSVnNX7DCZtEq3GR53e3eEkwMXl14PvOctPpqhh2dbLn6y5uNf//lf/OBrXn3wf/zKBTr3Pzbj/s6/8OHd2fqVD/z6//zWDx2N1Gaq6TKBT7XlZbDNU2ECKR9bJnm0zKAvTQbm5kiOgnGBsYs1MusSsh76845zq6lse%2bAAp2NA5Ebm92WVaHSmdkHBRNr1OnBO4F9K3rLHezaB%2bLuTned2BOwWYNn2R6aHAJnhzDMC99MYpwTuwxjdgyqiOrAXDDF6jrpngIzyNz%2brjDsHdjLu9EdlaNLeCN7vWhRIuD%2bfnAG17QVgJ3AvZd0TJEqmvZweWZ8NhLNzjCTUrFdz1S3miwF2e2623ZEBt1IbymAYhrZaeP5N4CEVTwlCmKRqknZWAbzsz9wQuY82gdAkBPJwybQLILPXw3i9E8iUwYEswI27B%2bUx1n7Sth87yBGsCzNYtotckSHodSLD58hCjFZrDON/6tDB939fiMHoDK/8mjZewXNdc1HrpjhNIuw7MSol4P78rCf%2byC63O/bhBOJCvNCV05d%2bH1gF6yyrzoc5jCVdumXelwB4uZNc9HrhHKYr3j%2bJB9l2Sh22M6RBBW4CfNUbfPxn73URuZmMAVJoRRLnjCWkOQ4B8UZ6IZN7oRp3N%2buh3mgjS3tqlpkrkGA1Wstil09lFWTaCVlJAOkN85nDym3s%2bEGZDd87GxEka7EYym6ohSdQt8/cASsTi2Y3ynE6VIaeTD1Bu7Dv68BL58CtNeBFA8i5mJTJx6EHsm7DRNgbGyYRdl0XqDYp1tZAkEijldeYemtz1yerk7%2bAybegXSJd1h2HO7KLCRN6lHHCXDgbjbQDjywUphoFEU60xMSvfmYXy3YB0TPVaeXKGylc%2bV6Jt75ZONvEYO7TVn6dz7RSTK%2bASGXs7CvvLXzbKdGxkVbVwGqSqpAoqTLlw5jVOUeSgDpLPWHsxk4uydB5UsXwLBam3TOymSxNkIaUeDnI%2bzkG00ykBx6tSnkt5GAoAFfGKdjWsr3JyRQ9LxCQurVO51eCUI32CFtdDVHP1KRBZH90LWHUmYw0mfGaL%2b08mXXgUHudFWJlmPsDrbhITXtFdefWYz3JclS8OlKnB79oyCKkESVIUs69Htr1KQqnhTTh%2bNOHH1UQBawOS427FvrzZqfwG1vi7c6xW9h4Js2aBegqcLea9XkiqUn2tjpvTVRlm1Hdfnnsp3mvLWokQNcUvFGrSE1OXcizCLo5j%2bRGzw5EpvopATLdYwT4uh6q2TGm4SWRw8Te5ry58XOy9vV6CDqzVPMTuI1dmVTImDdqIZLhEQKCeKtHhocw7QB1ylQX5uwWuM%2b1GTZZxYwt5Ob7JRmMPQjV6y8nZMtYYlzfBBjaeckknXIxQrA%2bHNIC0pNq63O8YauAs3DRNJ%2bD9rWG/o4UZIoVzDPSwgUIhSDnI/alArfPcrzwmQSDbgm4Bz6O70xQqRU4%2b3wVu0/H6N6O4FHidXIfEl4epxg/e0kqqB50V4B7GYSTMCSRuuejeXVhCsJiv9ZpZs5i3/XRvrGYpJh82r6urkCsLtzb87B%2bJZNE0w0C%2bVspqsceYiaamnxJymLaVzP0Dxys3czRvatj9PqVAqN9B83rBXr3HCFfW9dy9Pc8tG5kGNxX2xvPd3A/nuJGVEE2K2R7Smha13MM9lysXS3Q3ddWywWM38hQawBf974AyXYV93sFPvUjMe4%2bD2w/5SGmTLdB73wHWeJg87JGAM4PR2hvG6shm9OVe2jaxNXdMbp7dTi1EUYt4Lu%2bJkJrM8KbLmX41Tf6%2bOW//NyPfuA9xT/7r7/pyU%2btTuNfBuD%2bs7uT9voHfvOfvuVD%2b1NHikc0nQclK7wItFAkoKd85jjVyqebbirj4eqD7Du9162G3ajAy2trrZ63WNyhb50NuDIzwJ1sOxdABPNX3BjjSiRheim6dBajW4tkNdZiSN%2bw6VZGI6vACwC7nVMIiulOyfBtd5Rh7yzGvdMCE4%2beuA7CfoSkP8F%2bHxixvO6kwLe8uQKnVkjxjCqlMiUQo%2bO7h1reQ17dEHF2Pj4X5Lm6WGUYcOStwZ%2bSrQSyypp4to9TRzLOuSeZ/jjgmURMhvU1qfXBQWVJk2BuxjyMamQ05aItCneVjS8DewL5smuL1f5Z%2bYsFJlZGM9dFlrzg5xoncxw8GysX4FviSEFmkrZu5nVpnp%2bzh6wMycQh3h8yo9bhxl5Musxw8WM7Ac%2bnaZKSXupG%2bMt/hRZb53j6XU2spQHW/ViunwD3IkbljoNBvRDGXYB7RfXtX3Vwgt9hYip7LyeqfS20UrCkNWVk3sKQrPB4J41%2bMzXvlw%2bIJ/YfC8C/nOz6RcCfcy1Z0M0MaViBk/j4S98IvOVZFlAylRupD2SJdamiqMyeZTeEzTOFVejEUY96GMQb8LIuMm8dTsprqclyusDTSod1JvAJZHLQjzO0Ih2wLeBgm1AtdSaAvBya5jcph2hwIWD2Ug1ynNIxpVi4y2w2OMHS11vZeH6vEuWis9%2bsZ8K0b9ZowQfc62snYISO%2byjr5q3TUfk9/i6PkVIcAn%2b%2btnIdVn2mbp77Y1u1TcAuluegwBaYKt0X6/DE/a/mtFgjDytf0%2btnErO5aLYLfPO%2bdW%2bwzL4lPWzKn0gHrIUs6x9Yq1dqRI0PfjkiYA/TJo4/sAC3G5gBLjb69nGi91DvW44W%2b1aaq5c7x3mTY6RSONW6jxPaAyoA5%2bs8HYnTBkGtyGmKTCwSs7iJtNpDdhrCi3KMzmvIkkS2SaQapYusnwmQoBUeD40A07lWQ2XI5L8cfo3Wx0qQeL0ExbZqmIO4QML8CyaH10zk10jL/EYgbDSBeL3K1wtWu9EemfyvAvl0DZnfE4mGJIiapFcCQkoh6pVUZT2UA4k0Jhade%2bRSeqn9ji67frWKZJahEvpaQbWi1VO5T7LddJoR4C6fcRHBzzS5rsy4y7w0l4P46I9nKoOxrit1Ak4mqWrFc7YKBe8ewtkR4nB3IU0xdscEzYu1dSESFtFvU04zN6XQsIq0wdEJpv6WSGXkIcy6SksbJFvGKbajHk7iNppk%2bScFtqJzdGImqWSoS8EoB9moA6%2bxg8GIWnEujnR/XChJkm3GY5eRBDSH5AKDnvTzfI5SA7bEIGVGVh0h/aOq9pHWzcwCTiGcmH9G33bT78SBTEB7KDaWsrguR8bNxCZWz44rC1SqDNZbakPJqV7aPosv8Z7T9CNlRNFBb1gIeD86zfG5FxMMejWMz2JUyLgHPo4I3Mm4U9r5UgC34oodpBuod3Q%2bzLHzqjXsV0McdxNJTi0vqOcs%2ba1UADe15nL/DQEhi17DEEgfMuQDd0IdOdl1u73s69DDGgE6iTv2DW7vAtGxh1MZPHV%2bpM2r6Nr3TdugHOZqgdF9BwdXClw%2bVNLHjm12OmR/lnSHwpG%2b7aXA3Uu5aOD5O1Q5kDg4uFSIrKZ5I8fZnofxGeBcz/BN3xSieqWCSS/Fz/%2brAbq/UsfO61y0s7FgjKxdR%2bgPZN7JKNGkbEYOZCEZkG6Rs1CTg7XdCc7u1xHVR4g3C/yZV9axfi3F%2b6%2b7%2bNevi/Db3/nSL7z/HcMPfs9//vSfHHD/rR/76g/tj7W065qT4tww7nZcFl2Rl4ruXbu0DvqUvcjKZkXHbrexVU6XgKsJk0pHsESuZF1rYhyz/AnqCMydzQjdIbWFC9bWOYuBDXWRcbsxehQKAlibxDirRtJoLDu8Gcc4p85d%2b/JSVE4GT7JqrMZ6mOEegfsZgbsr2kN/GGHSG%2bGw74LGOW3fxdtf48OtQ4H7RJ0OLKjRNs8CTD3xt87p0V4KCFrAOcrbaLqUz7DAUlcuQlbZUOCecTLJkUfr8GOCfuMqY9gwstDWxYW7JtC29nb2XlmgL1hrRUFwEY7je5IAZxh4K62x24rLgZHBzJNfzYrLHotNuJoX2rMyGauNNZp5W6lVJvRS5ddyZMGGI21JdwkvWmtKc1AcOFdLvvMj6j85%2bN0bAB/67hQf/3iKp97exsYNF%2bteIk77BO6HRYzwjoN%2b0wL3c9E%2bTo5COBV1o%2bB9kAJGjwLJPQ/v8A7xa7gEx1MNnjYzD2%2bHeZ%2b6y1Vx4EWepA%2b7CX8a75vOysx4x19Dtj2EMwvwgfcB73qzI6H5sZSB1mRmOl4QvPenCeqBJyF/3mt64Ot4xriECz/rIfXWBLzPnHXUgx4cd11kNJxIL2KBpX2Ki4ux2AsyYcVbFR/9OMdOgxExF4M4R5suF3Em2/YE9PsYsfoGFDDf1WLD8jtc1FMHv1UvcDICHl13RP/Ox3rDTEacnMygZMdlMvi3NhbJruJGU0p%2btYmvZO35y6KbNw43BPJSMMhowL8Yo7IaGVu99WVCw2KNL7ZPuw9xkzKyHL5XTvjmvjherL7H/m8rKVv7TC6q%2bZsXFb8yeGRx2OaEGEmdJo7Imxj5IGBXaRNlBSQldPwS5t3IDEZJIZFWGQPEMMBDMhshzl0EnotZSvlkjlGRIklYMVVB1emhj7CSw/VzDM5q4jXNBSGdZ%2bgV75OBH%2bSSv7TOPJuqh6iaY8rivnXmc7loGvvGWQBEro9RTvcND%2b5ghkqdiwdt71ywB7VAF6O5i1rUV%2bBrwHtzs4LeSR2tdbLtBOuuAEBRbjCCZRZMBO6hU0c16otjDRdRScbfrCN0p/BDnm%2bOqusgqFaEVa9UWDm1QDVKSsCdDKH2UTLulM/k41PklU0Br9RrrzpA8WYRcKh2nQCXTi0dOI0dDEcZqvkp3Oa2uLLonKC%2b5ZQWNSouhlK9nAWQjtFPd%2bZMPLchcLcAWUEyF20mQZkLsZHRgwsXpbI4yleK8YkA8aHRrDGKocmg3J%2bumJjMSbmOfY/bZMMjOLXtOXCXc2PkgfK%2bwkM0Y7XVxTHahrqamCoL1xJwt9sJIGc0XNC9avr5UowjLgTuD2rbrQWkgnkPk2kq7DpxDtl2W4dGIv9k3APq3Cmr4uDk4XxQ4HyYC3B/7vOpJGWPWRyy7sAPWDl1gqDqKnDf88Ui0onIuO9Lx83GBXafbONeNcTReSLRrND0sZ5hzjkGUgvevqogXP6%2bZ0C8mctERkOzkGMPDUpdWNRp3xPnlzm5IpEUSHFDlcNoyFEKlTmFyNjIsLeuFOjfddC6puw62XEmmgpjb1ZSMkbdJNNOgAZcZgE0m3ZAHHZDmXV%2bx8%2bAu9cKXL7noH4jx2jPFZ4snbvLOKhvZTj4PPB1f7WKnSsBRnmBj364i%2bd/po6dZ120iwkyRjpEcw0UiSt9KvCHqG%2bUrCJ54vNCTRr9au9OcPR8HfH1Eb7hGRfbN3zcWPPx3DMBPvtDyS9/9e4nv/sH/tIb/2SB%2byBnBrWCOJGYcJIzqy8J0xnnFx4/3V/KwF27KnCU%2b9hxdeVJ0G7x8hJwp7TpNMZ5LdLBm2GSOnC7owM3oxMlibcOImUAatC%2bXUXPJ0HzYsMAePnTIize5NMY6aYB/Mb5huD9lMmphnHfJ3B3XXFrIHCPh0Psn3sYpDlavo9nn/DQ3GASHlCZUAvpIqL91zxCp0BG2DP0MCw5x3hTBYd8jNBUtmfanwvPuJrn%2bEWNn6b1aWVV0Xcbpl2mQSnYoO8JoDauMZyw7YJFklFXEuLKrjqmDc4nXiupsaCdSToSYpZCHosqqNbphV%2b0Fo2WsaeLjQz0NkxfYgYtQ/EAY2fCiHIgnPQJfMx9tAu71XAF36fESdqOQRB8j8l7ZCDaNYBSqf/pH1Xwm/93F0/92Ta2rrhoOwTuZNyDJeDuDgK0bwN/dGuA9JDFtZRlDx4xnuiM0IkJtTLrGpTWB/k8y7iX318gmv%2bfvZKBKYd/OUN2voZscwxn4uO7vyPHq58I5Br2Zw7afgbO0wIMzHPke1KEYg7e6y7G4xjVag1O1kPmrcFJ%2bqhW19Af9kxypNZEEEbb99DniGgUSPYqSkg7YIvX1kGAx8WDNIlSsrWCfF7vQsB8K/IwKm0nA36gvtwVPxd7SYmqzYyvcuShR%2bbf9xAafTx/oxKY33KpMfUwTNQvmIVxVHuvLh%2b2AKKVtsgiNlYNPt%2bzullKS%2bbS4fLtv2gRXWrr5b5hm5iAohJLvzSOlvZ90a7LgP%2bihcLDFg9yr4w8prxYuPC3V960jLuM%2b9a7Os7RJOM%2by9WX37jaWBBvCzSJ05d8z0WSe0jiIaYZqxkrC8mx%2bnisrCQdMk4PAgShsRf09R4LI3pegRcWSKcZ4sBB1s0QrbmYBS7CsdqcWqLAEMyYVICA0gxDQgUE7QZ0%2b9S101/aFP%2bpFQMBJJ67iSQ5geNsodYalCQ1xl6O0dgS4053Hy6EaxUm0rrgeCkWjlmO0KsIcKckM3K1IFNI4E72PR8KqCvCpoByziGMGrAfio6eLL3o2JUxl9/k4rquRdAsM85Fdjg7Bmq7yszzahtdsIiEjNe7TJnsa3VffoONW5XsCxaiXJBO/XtIbHXQT1XX3g60Kio17dTFE7jW8hPE/jZG0xmatJmkG0apgTEBlAuIJp1i%2bJnY0WqETe0kdXNlPU2BqblcxvjWi1MO%2b70j0hp7xArYWRRJIysSlaD%2b3ZxrmeAS6UrJn53SFQJ3PsiMGyfIxdxj5mY65dh2Je1Y3LlI7Zi%2bYDT1At4N287tuT9WTeU8z3bdH3HeTzGaOjina8lJjjs9D90XXUy7icg%2b9mZVNE96wrIrcA/hVxzEZ9S4swgKC1mqs8y9MECIHIdd9Y1nlHrOmNqJV8baAoNDlbH07qqzi5leMaIenWPRlQxZ6qjN6r4mf/K3ohMPs8sZBgT0ZNPveYvq64Zdt1hszUhieC/vXy1w5ZCRbL7OcfU%2bPdKVBBGGfQFpFuoMrh%2bNB4nMEZpzrA8H2L9c4Mo9rWwsqYZjIM4KvOcbXNx8MgTLyvzi7xXY%2b%2bEcV96iODZlbkHKYl0OnK0hWuMWvEofaeJiJ3Mw3CyBIDPYaj8jHhzhcM/F697t4WW3PFzb9LD9SIh/8LP4%2bDNn/%2b5v/e9/790/v4oCvlQSZvV787%2bf%2bQsf3i0qVz7wY3/72b9xdSfaYeeV2iuWVStUpsLwsk1KszdTOqtnNIAGzJOV53eZBGAVArR1tN7pFoRJgzVSFu6P%2b%2b8a/SP/tiFiYfrHMc4q0RJ%2bE1BXss0T9s6CdHMDmTvZGZN5M2DSWBH55zHytUg0oTIBMO9plmGvE%2bM8CHHGIgdVR4D70UGMaZ6iR992N8CbngSamw4Y9Y/hojEaI6xqgpwNLzIZdcBCS%2bZCacBeG5Ut5xNMOshqW/AmXWQ1su1nonGfDs4lpDYfAIxrDLXntFKzoJ0SEnZ0abBiu1eSvJjX86TU6aK88wMNoZQ4Wk5kLbPZnGAIziUx1ZyKVOZb8VaXQ7nIIcMMWLYT2kHSsvWUAHG39pzsMc4jC1YXbGwvCWR4fHJ5DRCw3%2bGERcs2gs5/%2bxHgn3xwis3Xt/GV14cItziTKnA/ymMEe8q4u0MP9TsOPntziOzAE/mTE2hRJAHsssJSwH5Rh7Mh14d2sj/tDxzOwBfALHaqLId3GcgHTWRJhuJ%2bDudWgR/86zmu3QhwNiL7navPs1cgZNVHA9x538gGCcgWe0hqkmNNxDYTYC0kK%2bggqrpa1MeGWM1gxwVxeWEnfd0wlzXSQYYJJ8ibL9zMZK2aeUeY94bIMFikbLlAVjV0MZhQlqMTfp0s/pgTzQIjiLc1Kw2SwRcQr0kZzJfhAVCOE/imsAw4oXoYpRkagYdKmGE0ZWKsnhAXBwTu49iXZz6YFMtttxoZOgOV7TzsQSkOpTeMLgxjTywwlwD8RV/UNf3iYfrcRQB/ddMHdlei9i34X2X4H7ZYKB%2bDXZjPCy%2bVZE9cYElp%2bMTc04ew7hxbKHOJOdMGTZUNzEaYpmTAHK2USlYPGeLUkwXX6T0f9WtTTI8qCko4oXsFhmdVqQLueAVqDVeqYNcZEWEb4mRuOjLbVIU5EsY1qTxG0THJYXGlRoSK19dFuqzazBLd6N6LegONYIbu8QztnYpU2%2bZcafNByIxzbBMteoUWj3oeuiguUA0i6WMVbwovKJAVawjQQ0ipTOqgko/gBQ6cqIE8JVNO8O4uaeclQZVymXEHeXVbpCl5ZUs0bTI3irLFkWRPesIzaVOinuMCjbpKRejKwq0o/ZB%2bKU5v5%2bLwIgmEJWCuWSi8nx7C5AgxK8/IPWek0lT5Npp2cUgzFQaVfS6EnWdC6Xy1Q3A%2b4bGoL/qc6LEk0MrAK4t4iRwsKkvJNaD7ixQlW%2b5z9brK8kTqJHMXpUKLxMPynCNFmoxdo/wOFw/c1thAlvPPRJMv0QD1qi8Dd7E8LRdoMvMgC0BZ7KJEWCHRF7pKxylzjAIF7mOObwUOOz729ie4e7uGZDiTish7WQ2t4y6cyJXaAlKAKfIwO9uHw5AUU7PjBNXGLrqP0tldde6cy4khCLBbxju9cYnSn0KSRdvXFbQTfJN5l3tK6TK3JTNupC5SHMleYmPhaOUvNq%2bRji9X7ml8hWML5TBDY%2bO4f6XAVdo8csi3QNFqrv9jpaWrgxqNL24YJp8umlMm3OZ48rUBXvfWQOa1j95z8Rt/LUH9MT3B5iVH6h%2bcdjxgq4/WtCXHzNoLUTRQLf1m/UHpTO4ipuOZM8KlZxy8ds3BpZeFuPVkhH/6B7j/7fu/81/929%2b6/dFf%2ballZ5k/NnDfeebv7/6V//Kr3//t3/yW/9F3nR0LQG04XG6ckaasyiBEu1fSqFvcTPDOm0dWfunhAs04xqga6SqUA3VJ6mLZUwmBnMVIjRxmDoxKCInfJyjndwjM5TjPY2RrkXRcvxujEynY381iHHnKtPP1oRcJq98jcPeV5e0YV5luGOKsE6NWcxEMInQOYxzGjCB4SNMpvva1TTQ3AEbpq76L%2bmgMn8CdyXh2JhOGwpHiSyNswJ%2beIq1twh%2bfoSgJ4LLapshjOEox%2bUuAiqugXdk8TRy1SZoEo0z0JNv8xW78KrMtxIuRP1h3GQv6ZWCXBL8HLSUtIOMkY51dxKvdFGViOyE7x2NakrPYAktmAheryhJLb7VV3CcXJWXXGNsO5om4ZvTQJEP9nXLCKu3ybOVZbrO15sik%2bdE7Gf67/6SK9TcU2GwDl677KEytsCPE8G4b4L7CuBO4k3GnP1YRGCmMd0lCw1/suj8Uof1pfeDlwGc2gJefPQjeebOSAk67JdNuNksRphXgMvDD/20i07AADgHqGSI3xyxz5p7TBB/UZ261NCGUrKPvxMb60WjVC4LaGHl54VBazLENSiXQXG3QWPFTQIKtFGv6uGW17GUT6Q7ZdnH4MMysSXrUfmOqQ4okQUE5ATj11WwrBPqj2EgAuEgMGfpXgE/JjZAQZOTjFPWQtqBqi0tXG5%2byKc9RoB96kihIHT2vkUZb2G9c1Cq5MPDU0lMTfjwAto2rDZNkrfPNmAA9yjAybP1q0%2bC2dM%2bxfZgFjfiwvvcXNaUyY7ia0P4lN70vsAB4YB%2blSAGdZDhejZiDIDUtlHm0uTi8bs3IXwLuq6y7TWClpj2Ox/AMeSEFmbwcudtCnvVFCy4WkmTfkwL5pCaMPAF7/5SOMybvhRLI5gxb4xCDbgUpq1EXQNRQ2nY6ykTMERpAR%2bZlwlgWYgAAIABJREFUaqKhbAtk5ptbY/Q6NZnk2htTIWeG4zVUKywWoL50zP9obUQ6ocPB6cEUazsRaqEmslo5Cz8W7/Qq86MM826AexRUEHkTBe/VNvyiL5Vbw1pNmPRKOganr9AtEDt1Zd2jhVRGF9Elnbsi6DmLQqBPUCIL7xJoFeDOPsEIC6uxmoqq/DqrXgsrXVftvPZPDYlE8QHiYFc05sOJJqJqSBioJMfopZuytKE15nicqr2i6dALzr4Q4C7JrdyprQ5unFq%2blDar%2bVeFJAn3B4kAeUkUN4t/PX4D0LkwGOk5EdxXTMXzufTB/OAq264aebJEjvwOnXW4jSgRLGg3JcQlslB2mZFEXWXoVaFSoNuuITohcNGZRAhMWpUOCmnHXHyScSeN3BezEFo5%2bjjpjvGJ36siHceotz0cvzAWmQxZ9u5LETwqBCoWuDP52oXLleI4wfjZywhMgirneGrR128RmCvTTdkKQbo4upgJTiQt9x0B2xawrxEM33XQuKIAXMZdjhmU%2bhrwR491fianR6OTGwW69xw06BrD912IPGZwl85Ly3eZsjTq0imRodTtj/VgVID7cAoxH%2bnsA0%2b8Ocfbvr6OoMhxf1Dg33x/gahaCFHX2GKSOdBuMlrG/CqTO0FhFxNWr6U4uB0iCvoC4OdVVhkdiGleMkLziRCP1DJ8xZMBnnxNFf/LJ4Brv/W73/upP/rsL/3hL37HUiGmLxlHPPO%2bn90djY7xvm95zfbrHotufPb%2b5AZb8bNP7W7HTvu9Gzvrb9qk5yxZDiP7aE9i5OvLFoo2E53P1J0LiDOozFYvLV9wVjqllzormjKxlC3YO1Nduri9sBCIDV2asyEjnq4r0OaD4J6AnA8Ccn4WnMfAegS/x6JJxn/NAFCy9%2by/khg7VUDxgNSYyUdcWbPWTgyc9tTq6vnMxfnpDI1hDWebY0QvBjiIE6l%2b2oymeNurm2g4BWYtF2ujkVQwI4jnqtwZd5BVt%2bYWWWRoqOPzJ2dIaxvwxmTX1%2bZyliDuY5BySaDuAxa8WzkKV%2bVkzclIW%2bK3zITPFzqlC24ncElEXSncxMsvBY3M9naQY2de1cKvhtG5jWX4RRIjaH/hmsTBhwsgbrfKGAqwMRVQy99lWxCtunGPkYHM/Ge/s1poifvmNRGtv93WZPhbn%2btmTQO5UyfA%2b77dxawfYvfmFM9cHWHQbuNglsAPczgE7rUCQT/ACxl93AMkhw7EJc54uKcHRiJjGPc/1mDyxb78MKb8C31v9Tu%2b4U05kgoTXhJRMKrZaiM/68BpryH71ASXXx/iDa/I8J5vizAaAUmco9JkBMpFEGWosbSzKRhDgJCaxZMoXggWghC%2bM5nHIqibLaAgpxEaazl7/PPMfLXGU4Cgk6AtJCSYgxMeayCYSJlUBeVYI%2b4ZZM4UJBEoUmZRBvnldnxRJMQSzPxMGH5hzZUJpksGgbm4ZTAJ0hSQIlgUP/KKJ44lBKfUUhPsEJRyHKc%2bft6zWC/AyHFk/wLaycprsiYBPjX4BPXjqR5DNbKuOHRIUtaQybdyjRLtsZVgYUvHvwmYuRiYu/aU6HXpPzOV%2bnwhBt8uImSblWjZlyKN0eRSVxYiPH8uYJhEqbkKen1skmqZcZeua7XupnjNJGGCHoH7VIC7JLCKZSRzn2iRR0mID9/RxRjzoejzHgbia4QRUiTHFbiekeQoWjJgqsBZI0Ww10R7e4RBp470Vg/pZxrYvhHj5E4E/%2bVD%2bHstNDdH6J7W0NqaoHdSQ3t7jMNBA%2bGwQHtrbJIfjXRGVrBsK/yM9pBsp0zMLqRaNsE6pYbi1JQ5aFRy0RlLkmqklVkjj0wobSNzRLU2gqIv7HxUJXAvBLhzTGI1V6fSQp4my8DdFEjj4qEqleroaNYBKlsiTxlkW2jUFbRKHyLAzU30w1l2VqFLFBGXZZUFHLMf1Hz40w7iiMWRdKK1bjOkj6O4g6S6g4mRtNgkVCsZEWgvlUiNn/NDGqUQMmVrU5m51Y5TvYrEiV8W/gTqQ06IIuNVHf6qhr1cZEp6EYGW3CMWmFqsPmVIIW4tyWRkjjMIXaII4oxjJDwNk1wrOvxFLRN7vrbQEmVfXASxzXKBI2y7WdHa%2bcvzHHQHuURhqAUfELgXqYD27qTA%2bSTEYWeMuwceDj4FNDdcyYU4fnGKoAqxg%2bS/3v0qkvN9uCwiKYlzGTDKMPzKS/DTDMe9DJWowPBI%2b9YSKDfJoU2C%2bPuLqrPcDa0amTiqJ7p48grg7pUC1/cd1K4WOD8wkgaemFQxJmWt2/N%2b0f1lYAsnGWDOayKjmh17VmQwduqQZ2kXi%2b3te/NtSlNd4Hq4Mx3jWqUiffHsCLj2ZI43f22IiK5QnoOf/h4WRitASNbYZdI7MKMzV9tgGIODqX/nCLPFKMRBjMZmbeH1zgVt4mLY9dB4eoibWz6eeNzDW7%2bqih%2bbAu1//pHvfeE/vPQHH//17/h35XP5gsCdYP2df%2b7K9itv%2bTeeev1r8OLzL%2bLRW9dev88QS9D8im6vi2/%2bqksv/8ReevNs7O88suPIYMjJWSY9G15mQzcduGUsFnkQouW3vt1Gq25xwpxws/swemRp2CtuLxuzGOfVCEE3RrGujLnVkXrnMYqNSAA75S1y/3ox8rb6sxOYc587aYzjMMJOHOMwiLCTxOgwuxrApSTGEdl3e2NNf%2bUAwc5C8HDcU2bghcTD%2bXmMxqiGaW%2bI51o5modMlmNSEfC1rw/hNgsErgHupiAErxnBO6ugSYlxjk8E7NWtBXCfnEkSqn7oIIgHGKXaicikM7HNMlW0hSrfXAHzRtfN10uMOifPiYKhVTuvVQC%2b1BGYzLkCwsvAWTrcSoKrgrUlOGgYR%2b1YlomXpFmz9uJ5cHzl4CcgzbD1ci9LSablpFt%2bh9fgYY9VVpF/U0rEiYblx0Um5Dv4zv9ihs99OsbLvnpdEo53r7myEMv3XJnw%2b5UCfk%2bBe8Dky0O1hORASO920XtxEPqTTDK1TMcSU34R7Fy5GgTtz5XYdfv3E2dzCqQY1HXAawwldu802qJPFC/jI6D18gTvfk2Ed70b6Peo89MwP6UDgV8I686ENklQZiK2Ye3IvvM1AUa7Qo0375iKCnOMTEKqSshs8qlO%2bDpmrFb85L4EpLHSpykcxGebY8OvMv9GpDaly0AQPUkyLVJkJXEPbzb6iZkk7H5sPyNo78epAnMCdONgMyb4ZLVDsvd2KWRAvp3b%2bUzpBpsJnW44vTMSKD7zxtySLHpn5GC3odsQuJOVFyccOpywPxo3HOknxpueAJ0nTeBeHsJou0hGSarQMsnSnDfBeKOSygKAUYHh1DfA%2bkEwr5G9ZYZ/6Uceci11YaALEi4QCMqtFed2o0Bs5EUE7WR1%2bfxQ4C4SGZXSELhPp2OJPHquKwnsrSqlBI6MIWQl44Ssey7M%2bxAs6sQISYHZuImk0UV6SDSTKdlh5DO94wrWdqYy9xzeDXH55gyD4wqa21Oc3A2xeyNGr1NFc3OK/imz03WR1N6c4Oy4hrWtsUq8bFExYdsLrG1VkBrJhUSDcgdhtY9RvyXAfZYQICpor1dzkckwykvtOvtT5GnRnapYXwJ%2bkEtuhQB3L0XiN1BJhwgqZNhzOJECd/q2yz6o0y4IWCmf0eKHkqRKuQw91ulLXzMWl8ZxRpjoKjXgmYBf2240WfUEU1b7NuCdn2nSJxPTtaeEcQeziDIc801xjlE5WjGke8yGiT2TYS0wmtI/3cjgjF1ksxYIey2BAXioJB1MvS24ri4aeiPWjPCQDjvw6iTDDOgedeDXt0SeV2GhJpeS1IXuvyzV5Gs6zVibSzs3SuRWoiu5uNewT9GNTHJC2R%2bmfMdBvcbxjIsNVoB3tKDYMJNIAj%2b4qPor2xwTaVuyDV1zFLSft%2buIjsZotxS8Gxwq7ZNSGZFPMela9O8cNxW4T2MXB0MPp50pXrjj4PDTBO6sYu%2bh8%2bIEATXuFaB7WyunxgTuQQCXExYH2kmK7Veu4S5diM4jjKIxxqdq4MBFJiUlo7ueTHN3L2eiN7dSxrqxV2Q/3L/Ez/RaUgJz456Hu9cyfb6c4/IBi2exummG83surkWLhNL5mJlqZMyCb4L2%2b5MprlYrRoJ2wWBTYg/4vfvTKa5WzPbzz0pzpSTY6nY3KzWIdUqqc5tzrcA3f1OAIPIQr/v4lR%2bIcXQXqO8COSP/u46w882GITL51QzYvVng8A7rIHjYupri4I6PnSuazCukCQuXDjzg5hive4WP9R0H3/pn6/jHPWD4j1740eFzv/7zH//17/rSgPur3vnPdr/tL77q/X/zO555B4BbxK80YNBLUxJ8Atg/yfF7BwVubHjYaTHpMsYgioQ1sY9HNhda1DmgW1Q8Rj02VUpNX26Yv4VVPVV3GPcsRp%2buLwawyaSni2jp6GTAGUXaTWLkrUjHBcOm0upRwJoJydjjIkA/Ma4yq7d9fl/NzLzEIJEV601x7FZkAOVqlAPMJ%2b6kSGosg1vDiJkhiHAwSST0TRXCu18fwKGrjO%2bI1rfojlGh3tBI7TgINfMO%2btgWIK1jmwkdEdpMu8iqG/LMEYp6dmsfR0aJYNcCXblOpodbgMsOJ2ykiSrItoZZt6XNbccrX49VRt1%2bRuAuh2gWa/b9uUUkwXeJiRNGnZZ3RsZjt7eaczLqS79rkpuFXTNe0Ba8c7u5V7u5OTYRt8y02%2bhBOcIgA6wBebIfYzEnp0JXooYjllt//6dC/Kt/SEPyER55NXDzMqkr4Lg7FXeKLv3aewGqt5WB/eTNHmZHnjAfUnTpUSC/a0I2Xwp4fxhr/oXeJ/h%2bktKWBUGe91pwW/QrvJD3NPSQWS1LhpVdjS40n0W/DmetDwybIhHiFOVf9ZHtxSguByheyHHt/QXe%2b4ocTz5ZRb/HCVBD/Ey4jmNl3esOjdVMqXYD3kUTa8A7/afpouR7TNpzUQ%2brpt0rO8n54yLwbtuJBfG8h2z8lo0nGOdrPvN%2b24VpuX3ZkDVdSuzn9j273UX94YIpYsW/Wt00GIUkQB4lmXiO80F5DcGoMv86PzJpVruqI7aHdrJSKRl9yXWxS4aceQTlRTnHCIL3s5ECLO5fHtLv9DdkYcBKsyXkHs/UZpZv8TMLWpTdXBSvIrDng4sDVqEVu0wjxZHF0ipwL12c8nArZ%2bgUEjnQoli6MNDpZHFGYsMpThy5gGwWyuKCZV5gzTCqE9aNqCvLxVwF2kBaqeBkMpYkfZEleC3E04H4upO84Bgo4N0leHcwLFLMYkedZLhvyg1pZ5pU5/IZ4hhxrViQrDirp9ga%2bOi0U2wNfZzcjeA8McDWkKv%2bAl0C%2ba2xRq5ECrl4yHhqNO7NjQjdo1gYd/F/z12E9T6cWQNRlAvITBJWUB2gVqkLmKc8cJY4ElVhRCsikWNcnKqBI2A%2b9DJU/QJJuCHgOczOUPFyTJymWURzke3BiU8QNLeFBRQ5pGjVCUQL1PIOBvk2qkUHTk0dZ6RpSTKrare1hWmCqX6oA5GCyFS081Vua%2bYyO1/Y%2bgXRrINutiZFi2jr2GgGwkzX8lPEAS0gWRhLNe0iN2TxIgOGBxNPHFbUtJORlEwW6E1KmuCgO3RBsjAdsQDThiR1thvAjIC%2bti1MvBC2hkG3dpjzUzEnxb5K%2bStPX4A7F%2bIlTbpcj4q2YbYfnofIXWlDKWA%2bU77fyGSkr5OBLyekzqM73LdSzVyY2FxQ0ZbTt71EHMq8SEcZWZAC8SzDLA3k/vaGNAhgMTHg4DzBZ55z4KchhqczRBUX9/IKmp0ePOYH3g5EKmOTU137I5MEp9euobqViM79eJQhPnPEdlTOgYtF38VeHOOWX2EtUOxdznGFkWYDt6gI2EtiPHHLR29PRhfzZcDJNfl27xptGdVSw2rW5/hlaTxxcH%2bm4NuuxizjXtpsvn99sQDm8/FoHl0skBw0EVweLI5LXtnxiM5ADiZDVqTP8fXf4GHzKwJULgf4Fx86x/g3G2jf0H5T21E7ZC6i1loLRyiCd16NzFGLYoL33vEU43ED28aNJ6Vcxpmg8ZiHR5/y8OSOj8m7AvzWX33uR93hvY995MPv%2bony%2bV3IuP/S73z%2bPU%2b98dHXX3Hwd%2bZXf4XBnEltXW1Eh50Un/r0GI%2b8el0SZthWZfVZ%2biX%2bzZMjQG0aj3XaNWIz0pUHNz6L4W5EWrjEFD4SS0cObGTGS7pHey9o4Ugv9rAX4yyKBLSfBNQMahEmG6JikRDp2odjeFdoil%2bq0snfPhwDl/R9z74%2bYt3fCpzjMRx%2bNn9/jBO/ht1NoNen1zt1a1pZ7eN3U2RVB9V%2bFeebE4Qv%2bXjpfKahwwJ46yuqqOxkCtxDF875WDqR2oRJVxDZADPWnfEZqGP3xmfIaxsYD7qoNTcxGdKbTmNvBOoMBfM%2bEIBzQJdkzVLIUPSg5j2RpJRAitWKWocd0aqbBEAestURc7AiULUgv9yI5N4aO8h5FzE334YQ5wOheTHXw5vevegmpT2bxYCt1qp%2btZqUZa3KpHOXnGV4Hg9j2ufJrGbCJ3C3D4ICYcWNuwdZd04IP//bwN/5uxHyu1M039jAza0Erqc9cTbyMY5TBIGPF5MzvOFkCx/1%2bvAiV8C6/5iCdyaqPqi1Ko9GZhQhc36Rvpyg/bMbwCsu0J3zgBlzlFWsDlJFvwGnNTSdahW460xUDJpwmjpYMdHUlddmkCNbyH0IaG8pwqj34bY3FLTz8y7grNfxje%2be4Jm30hoylKx6hg6pNazXHARk3SkLI5j0FNDzn2XexQJU7iV14CMJZgv5KC4x1MKMjeuOdb9QR5glaYcBvpLvYk5VAKhdSEqYXs9MJDM1YMJ6DaX2ScDOPmFPn9tzW/uw4J/fvUjHZRcIc4BvFqosHjUgW0ggLZKQMnQzAH5KL21NfBN2LlH5Trk/yAJfVsYGGJApjnPcpPWk8X%2b/e0ZbOr0AlYBWiioJED97Snf4gUgCdCBiUx%2bmtMVUxnTAin%2bBL8mz/HsaKwNqH9K/o0wSbXkysh0JOVOZluCeAJ4Pm2TLz%2bzfBOnz61lR0M4f4j71M8vbmvdmdJXgIkaPuGFcZeb93TjL8J4QuAubKUWHNM9Hxj9H2XchK6h153scQ2YK3mcpWflCFgSTtIFW2MfZoIU8GiqAF/euFLPDioB6HiHBPn9EznQlAmvTj/rHNSSP9bA5CC5Otjf9YG0rwtlRLEVXpt45ongN4%2bAc/ngDQaMPZ9pApcI%2b5aDqDZB5DVSYN2LZdn/RpypcbISMcDERt5A8CnFz8jSZMgrpIuPAqbY1z4Me7sLCcwHNZ6NJFxcW2iyeIqtuzheMlH4xAmCLFil49QWYU7vNv5PhiVQnJfhdfdj8NnuN2Odb/imSYGsemedirVwVVe4Vq5VSJz%2bk7eO2sXrUBNRWNcDg/AR%2bc0uAedDYElcZXSJ5qOMUTn0b6fAUXp1%2b7gXy0TmG0LLFrOKc9E/hNTaRDE7gVDelL0pyfamrymueb52OMw%2b3SJZIRE0BPRuP2lDSA365L9lor0SJRpTA6NUStn3KBb5G0RvUx1MTzw%2bNewwtIOfuSSZ5ldWBKWGVImRxhjBkArGD3oC5Ii5Oh4Xo3v/o%2bSmGgyrGpzNU6y5OaAdZc3BOjXu9gB%2b4cIKKFmDyCbe5es3hjhMMjc7dAncWMLPDg%2b942IvHuBHVkBrXL35ZWPirBW7se6J4IfHDltG6uiiKNLpn8hM4vH0JunSfkQtjCCps%2bPKQutzs5AQKJIcE5n0zxCzmQ7mtjhawpLf7fAIwZ8Z3Aji4PZviWl7DsEjwzNtcbF/3sfmKCn7zJ7v4%2bIfr2HhZjsItxIqTkhnWMqLEjYu8dts6BnqoVnsYjdqySLx0I8P%2bbR%2bbl9heKROawveaqD8xxI2tEG94nYPBO6v4g7/x0i888mj8kX/5wSf/QfnkHgDu3//jn3jV3/vOp/4FgDeyR4ku2QAzO5DPKKwTVxatNnnez/Grex5etuPC56TNDpEA62bC5HXgqk%2bAu8MkLobH9T2ZRozenftkcSR7UCyK1DNFlSiH6VYjhN1YPqd2Xo6hF6NoR5IoKt%2bb%2bzfp4MoB/cx4MG9t6r07owvN0RgnYU0q3hVC09fk%2b87RGLhcQ%2beMSYq6j47mf8qDN3t3Azg6BXbWFbinIpfJcKcTY79bII1c9OIC6ycFTsY5XjrXg9pu5HjLKyoIKwWqeYHInyFmaDTIUKU2di4rUUtILzlDFmzoc7QJb8YTWa2CoEdFjshOStbfeJ6caQIk1j6NIEWuIQejWgm0GC0Zk/8EjHBRu6IXliQ/o3WfW6KZxFR%2bxkWDTtbqs07pS3mCKzPxSwlxplWu9sNyxMB6R4tNpemzczBubCBtMq60jRXMKtItM%2bHbxDdrOcfrQd9p%2b6gFDprMocgCfN9fH%2bLjn2zKqqXx6jq2Wyx4QraSfs8uQtcVezYWYUpOPNGTymDMaKMF7uW2udQDjVzliXNzndjZLmDJCRj4/gLfLC4sgfSY8TndMUG7AO86hdPL%2b8r7Dbjtnn7e5OdzDkK%2bK9IYhiMbBrTLs923LlgymkofFXjbt7Tw2NMTPPUyX6zTqLFlYZkszWTxREDA6sEJpQjVdIl5t22dVc/Z9tOcjLseL90aamEVwziW062HlOYsR%2bzIwM%2bJFLNaZCIXj68RcvJVBpmVie0CzY5ftk0pkNV2Tvb2IhaDi1hxtzEyreWZYfEXwf1oAFTsmGf68tLtWuJ0Ft8tR6wkCdYkaZaTYSX4bjbkNgTucr/MfwS2dnv7PqU29EJvRK5o6pvmmRIemayk%2brC1xdTEWUp8lLHXCU2KWc2LVuk1GsxyeY9SD75D/T5lLvZhQbpEOSLVq8sCwmzA46Snv1pqarIonULm52PaMaU%2bdOqx58YEVclLKFlC2j4toGemfv2UJDE8T9BC4C7joedKDhAlMsqqq9tRnOnviykrk/yLDLOpVvD0yWKO66g1RxhkKsGYHgcyzuqIzh2ZhDzLgkoHXKxDLsQVBH9GPrp9PcXRSz7am6HRkDsI2efihkjzWDCqSkcar6GymLQQskacmnxKa9T6mPr1dtOTSsUE7FGQKtDPhkijdVT8VPvQuKfyxjyDV12fF2GSpFPKP0TakWlhrYqPNCvQrDoCfov6pkwaom43BgqsYDr2duSE6lIJlvO5LcCkyaksLCTDHxdXBLUmEVZYeC6OhqbAkYzPtH3sCNM%2bniSgJIZsO%2b0gFzYk6rMmbLTkMbgYjGjmcIIRNucjnl57ShQKNOuFyGeknosBaSKnMXI62TbX6rJc0JQKqKJGL1e2%2b8FMJD9lHfzqeLDgdi8eKex8JXr3Etsu10fcklwB3/ZRnsMoo11vGtZd8Je6zhCDcV7l931KphIWvHMQpxVMaeYxKXDcdfFHL0zxwsc8bO4Ae3kN7eMuggZw/vkFcI87%2b3BZXEaAuwr6Xercv2oXWcdHPxwj7rhSeXg%2bXoq8hD1IqwvP/dD/P6np3nSGG5UIrKdKQueBR8mW0XYpkT0%2bZKD1XQ970zEeqdQwY2bCFwXubAI5kqMWgt0%2bioMWnEsqBRF78gMfp5et7WcZ5Gsbu5/M8Oj5Jl5sdBAeR3jz%2bx14l3y84ukIv/vvE3zs72bIoxjbj0diCZnGQOOSSmbW2gre58ZFGXGdAhdKo/m8da3A8Z4vPvDcPrkywqV1D295g49HvqWKj3wIv3x8fPu5X/uRR/9a%2bZI8MFf96u%2b/%2bLe%2b5jW3vguOI7IYltSVAdXotyRrmlZMDR/TSSoFazr9HB/9vSEuP72OaAY0iXFSYL2iVpAlLI3NJEZMGYuxYBUAafYvJLIZ%2bOilfsrCR6XEUw6wLCG%2bUzPadDOAc0DSMKzBKftjuJdqMtCedxkyBJiLeoOyuv%2bXtTcBti09q8PWns987nzve6/f67k10G5JgARCEkLGJAJjVZSgSqhgnIpNOU4ZJ2UpxBBXUk7FSezYhQixcQojD6nY8RiHBAowQhgHgRikRgNST%2b%2b9fuMdz71n3GfPqfV9/7/PvqdfY%2bPKqeq%2b70z77P3vf1j/%2bta3Pg6Q0wVOI11htzYAnCxxGrSwly5wHHbkWPu5supyWJPVLWO7/p%2bpWsYFwGTR3x0leDCukJ90MNmJ4d30kXoJbk0YUmRRpgL/9vMtsY9rOSXaYQr6Fkd%2bgVDspXhwFl7y4CVnKEJjCclFJBkhj3bhZYZtJ6tkJps82oKXnMviVDPrDU27HFUjh2Jt1JwM1mUBBCqWQbTAWmQlc6BtNMD1wJLJR8E/OyhZdGkvY7tIgG1ljNJwDbebdY94C6qaEyY3CFy4JXPe9Fqeby3PMa%2btJ6ja662PaTz3Cc6adlu8r1LEybBrtYWYdHgWuXDEF/l/%2bJtt/MrfTDArChx8Uw9bvaWEriXz3nHwMqvXysbJQXZMzaCDioz7U0BxuALxb8q6U0MlZeLsiv8oCNmcoTQsXE4phxmjIrDmNXTJskNBPO9Dh8/X9TmWcR/A6VNKo5UrRBYznCkQmfWVuTcFNTCg2E6pA9nE7waoXivwse8Frj5bYX/HxWhSiM6TxV96bV/9pjuOAGeSMC1qiDmpE2yYTaNEd%2bg7HRAoKQ1Oycwy6yH0WaBGp2%2bRkgTqGy3AQBJDFajahZJgk0V6bAsqa89F23aSy8B8Klp0mms3AqmXktouS7zebCGx04F1u7FjZl0zL5IXnrMBnuvr0ptJ0aS/volFKo9hZTfrPYbtQzlOTTg0POx1qiTgLgVQ83P1WDFe9vyMrTTLf2ul2tWmgn723AgQBJHdXZI1N%2b3H41G6s8z0Hu31HEmm5b0iwKc%2bnwm5UuRKJD76Hivh2g2G/H5SqpuPSSK21ygEhMgPVCrDjVUNiEwlVbWFnAvga3e6SOO5fKby%2bsiSibrM5FMsc1/sH21Nh2lVyEY8jk2xJ16WWyJZ9NHpzZBlHUxOEvVjDUkfAAAgAElEQVQVv7bE8qHq2VlsrV5/GmvEGxCIYWxbB0sE6VAY991rGZazLsI2jSoBN%2bkhItNeOWi7M/UNd7tSW0ArpTI5VWUykjsSKMtOjTML%2bwlw7zCpThNdo3KqbjmtPvL5WFh3%2brjTZYl%2b75QkiVWz2VmxLwhBw/wrQ5Cwf1tnmUIY7O3aCccCatkYMKl8DfjqqsaIpiMMMguk8Xybv6fjYVUpldHrfsdIZ7q%2bFB/Sh4d2eYLY35V7NiX4dRz03TPMnD0pdNXDIebY000/jjEDNxa0igSm3MjSvnKu10CEbiN4dbSPjjG1PfOKuOSv0%2ba5Jo3MKTfXmTcbx/UaLJE/bj51Rrm0HtnEVhYcMgspJb6M/No2pFTGblyJxaxdpLDtS9W5U0pF4E7GnR9m9d/jcwe/%2b1KCl7/gYe8ACNsejl6LEXYdeC0H568F8tcNfGRnDxW4i869gBsXWLx3H9mpj2mwwNIAd%2bkuxsmFBY2oPxcsR%2bc1mzyau6h8Be10fJHCR037Rgvc1WRJ7hnHgMT1HgHgFbgrKH2y1RabxkdKZcyEray6CrlItd0vElzzIolCasqFWICYRWBFswjQ35tJXuLtMsFTToSjI%2bD5D5a4uunhuW8M8WuvOfitH6WzTAGf3JZUTFWtOyUzYtJiNunEmVYaVgcKTLL3/vUKd2962Gb64vUFOvDx7m928f5v6eDv/CxevJbe%2bfzf/fgTf7y5ZrwBIVRV9Q%2brqvoYZ3Lu8Ez/qb9jgbuVYohuMAH%2b5W9McfAHNtDhgk3GvQS2lypbsY8BNa28IXR9MYmiAjTo90qg3o7kO6xeahdKgzdlUgzGK4tGhofIirMTkzUXgHi0hHvQqlkoniMZcbPhx2OGcT8b60SybQxaTi%2bURT8ZAbv8SxmA2Qc0G6i5eFuAwN8nM3MyLXB/lOHeuEApVnEVEuTw73i4OfZQOg42nRne9ZaBnG/bofWbi357KUl8QRBKGJCshbMcIYt20K/OxM/dT8%2bQR9vwswvk4Q6CfCQljckuT7JNDHzGEFQ6Q624LVJiE1SbrLUUKGpcFJnCpmTE3isLRGpkZAoUsdNZVtFusvgdC9zFicZswJq2j/a4wpCZJ82JmyWi2Tc6XHzI6BvveLIiTdePpr7dbhAuseyNydTKHyh9oDyiOUlakEEAwPyDZnIvD8EBx1Dm1R3gH/xChf/177dw8bkEeJuHKxuR6EtHnUO868Embm208fQ0wReuzvCtxxv45XAMX2P1KI4B73GgvG861Bt07mbBN3OGgHEB1HaqlrNBOVHNugXr9X1akFk3gN2y6JaB50%2b238i6m1Go06T5rPEBsHdGpTGbWyjvcWdj2C7Ob5yITis4G138yf8sEXeK3c0Ko2mBIasOZuwfgVRsJDuVpqVs%2bGiVFUWVaGwZdue91v5B8KA%2btgTtkl/QptOJJqbavtWJmFBEOQ2bQ7WQzYf0pabXugWgsjNdAVV%2bp0tAb77c7MN8SYBjg2FenyzXGXR5v5EwaxduCyybunmzd12Nv0ZeSD0mGj/YBAQyDzcFJesOLo3J6VHgQSMXCtLlWOYH7THX7S7t70k7EwwR4Bv3HPOS2GYytK8RgBVLyOdip2m09gTgTKTlrTglg87vmdesOw4jA/acqPe3GwV7rragVj2GDXBfH9NsBnpXc52i5GC5jFWvampIVEEf6XKC0hugyKaSzMp7xeRVBe8OplUu%2bVJ8Tj2/BSErAE8GXp1p0sMIratLJMcE8EbMaggYnXe1p1rCx0pGZTNWQTSuizm9Fg3oDUukdHeRDa%2bLNqNQPv3YK7FzpBRSckh8k/TNxM/Akc0xayaEHscTLSMLBfWhWkpyA10QULV6CkqLEr1qhKW/LTkETaAq52uBe3yG/ua2sNXdcgRHJCfqZ87ImN1Iy1RiAD8TV618sh4PAtypedcCSbZiZjNpX5JM8zOMsqHIb/hoFXy%2bIT7h8uBcJAUGuSBRPrOlTisiGD8FmIjKTUFjhKuPiIMuqNff1qrNoBtOhWGvxJgRIb5m7amN3l1%2bsTHOCMzadBxrbHD4u%2bJbz/YyfvasAst8NzldMy5tZEj7s37H2l3az%2bmcUYl97OlGBzuUH5idN8fpRa%2bN7UUsOneLv/i253pIcuZpKGDmpqgofIynuQRpCdzH8xBfuJNidsdHPMnQ7ng4vR2LrJNmCkG7xOhWCD8MkIyaCaoF3GWO07ffQJCXmHgLxKeUmCm4rrdTVq5qJjleN8E6q5SOCdYfMZHa9wTwm49sPPThX8txXxVpgvFrUxBDoobwcCtb4Mmgg1vLRZ1s2hRoadKyTppk1UdXcukzW0c%2bTq%2bmyB8OEO5PkB0qE28ZefvXni7BvnPUw73NM/Re3sFTf3iMnQ0XX/ctbdw8zPFzf8FFu1Ogvcl%2bwXZn9AvoE7wbr3OOAbLxG1urQpRN8M6xu3u1QjrlxnWJIXXuX%2bfhse9s4%2bXP4v4H3oovf%2bLr3A%2bvN2H9/C/%2b3Vef/%2bHve%2bpnLds%2bIVu%2bBu2F/eROj8URWAKXoZmywuc%2bv0Cw38Ve1xMG9uEpsLVlALVGx4Rtz4iQzERGxxfaNNasrGloNjBdYOgQQ7vGoyAS/3RuAvj7%2b8ZFZjSmhlZ/Y1tlayJr4YPgmMch4z43k%2bQT20wqXCVsEoRYNtdELnSwmQ4i0YAGYyevm/a4SADuPUR6QU/puEAc5/jiYY7ytIPZdgzvlo/UyfAaGXcC9%2b4c3/D4AO12KVnmtIXstBLQZ5k2S1bn3u2EcOIzZMK464wojHtrF0F6jkm1gaF/gThxatlKHgwR5WNBubLpMG4rVh/XlIk072nj8ur7YjuEnbgsWLEuHfZ9y7Zbhv5RIUQB2sZFhudVu8PYKIsBXPwjLHyD6VCWhgk3q3YXbTyfU9O/MJsIcxGWibDnZyVBfE7wboF8vZGRRX7Vx%2b335TyN9/WN/QovH0f41N8u8On/jRYLJZwnfVQx8NhuB/emR7jSO8BJ9xjfeDjErztT0bQTuFfpBsrJhcpmpFNfnr/4rOKibSd3Yci1g1mgvv5vAdqWYRcZS1%2b9wA14r3/BLVHNBga4v/F3dfekEhuBsWTVpwOgOzWMu4aOZfa0mw2ppsd8kApPvD/A932/an7pViEFWiKgWynr3mmHAtoZKmdxsnaf95HFKCopYCHgnRMdr9ddCPhgYqqyXup0QotTnpqAfDOGe2ELVaV6eH0QwKh1JGdpYWcNa8NNAT3WmyBVmHgp1FSJ9pSyCitvJDYgGLVrvoJ4U4OY7J6RlVidfXOcqETgsi0liSEZO3zd2FdK9KoRxbQOOEwWl3FkdfTmc6ol1uMwqVx09m/yaG5Car19A/A3QVSTCb4kWXvEBkAAv4lm8Kcty79%2bGjVgJ3FBOQwBPT245aHwyW4QVP6iVpSyAUgK7PYcYeN5tc3NgGiErejLnB/HsmXb7XWvQL1WzqWOnSCJ3%2bfvi2xGAL3VudvKuCSayDCq0wx/YpEPUHrnSCibMaBEATznbp1jz%2b4G2Hs8w6Qo5LjxAxa%2bAdpXMsQPW8rI349QcixKmMkT68glxzxzhlozLGY9RJ2ZMo1VBTftylqQlS46/hTwulr91C/rSqmaK8Jk1RJtqfSrgIHAPcm5OfYQBqVYMwsLTo07k8ILjpUKbb9A7AzQDunzXYmVaFO7zWRSSt/4V1zf6l2yg4W4CFTC1nfpCmfsIdkyamHoYxrnmsDJpOrm%2bmluFMe39ggtVGTXVZJW1IQTtMvfNjXeGjWyW23X9YQtD/rbQizydbnvwu7Iii0DsSpKSUIdSxVRYzNIMQcjAp1SnFeGXQXv/A7ZeAFdkoOj7idSiI3yIQPembRrZUAyjsn2M38ipi%2b%2bfoeA2G5i5BpF/mPAfWPAsALrfKbVXO06x7agS5085zUIOtdLk6RaSjcZgZYokMUpJE7VbWiZFgh8F2nGirUJUuaY0C0tp%2bQ4wCu3U9x62Uc2Z/VUF/eKFvrHE/pnSHJq0Krg%2bi6cMEJ68kAYSbcq4CYZJteuomp5mHgxeiMHJyRmb5SXHWAaQN2y74LsGwx7DeT5WvM9PjW3kHHUZ6cRFoMUh%2bUaeDfM/JaRuMjMUFZyKM401zzgPtUcxIkPfZxc1bKodo7gRmb72MEZteWlI4YhotKzG0Nzj5oAnr8hyfpsqmeBzQJ490d6EmH49F9JpeppksQ4uNFBRplYbtj2HBgcaN%2brwfsjmHdurMvMxdaVAvNDH/23TfH0N/XwzhvAl2chnvPw81/5ez/1x3767//Ake1Cl2D51rN/8TtOX/rhX7Ar3aOAu2XcbeUuaqoq18Fnf3OOeNjBlQ1W/NMk1PZ4iSnF7GQWaLPI2cPM49S/O/RQ9yKpemqtlDyjWadNI3%2bL91KGljmGFEXyAP94Ce9KS/Tr62EDdvRxBmyZKl%2bWVbK7fMu2CgvjAneOc/SHPobGIYXj/IL6F%2bIZNQiQE5nURY5WI5B6yYTFJgDcPsvw8LxAcdbBfDtGwqp5dx28NvVk8dhyZ/j6tw3R7lCD6YjmN848DKIlQup4TVhSwEUrkJ/10lEtmfHyixpQRt1NJHMV34s%2bExUSfxPVcixFmpoODJb9s%2bC9BrhrTjAGB9UXZ%2bdcy8o3gbwdCDZxj1%2bqq1o2JmsJVVkZDZmtVAE0P2ulNeIwQ1mNBfNWVlNPfCtHGesHL6DcUSDTvK8EP7w%2bvm4BW1O/bEE7z1faxdhmqvc95S6XOVX%2bHgHkz/9ahU/9wxYO/2UF9z2VlkmmPyvtONtjlJTOeC5u9Ldwb34KZ7EJd3iO4tCBu7ONanymbocE3QYIq468D5Bhnw60XLLo0nUiqZNMbSiP44CM/HAMcPGXB1cigm0mkTaHtdkRWTZ%2bZgC6zZK298i4xtQEFQ/RN9IYt8FhGI13eV4BaYA/8QkXW/ulWGgyn2VnM0OWOqjaQKdw0GqRda%2bQtGMMqo7oLltdVzb6BN6SmOp3ZEJz/LmE9KWiakVf7T7my6lUsGUeDKcQq3G3c0GPLihMIoNtB9Xrq1WYeVipT6Nl5HcbgH597rAkAvuOsNRStpE1EpRh5WvEHQRLtbTDMPR2fCi8MwnbzBch4O4qMLfgUpI9CeaZ4GkTY83tlDtnTky08xawN7rmesTASnNsUi0ZWxuFaMrc7LhtsvdvkCyszQvrDL797SZL32ji%2bp8K3ho7gcZJ1973EmUzmyVThInyHbY3H83fqCV%2bxilMXKHYhiZvpbkhJ1hbJHQ2Ies%2bR6fTE/adLLyAIYJ3E52UsZ9TN642kbzPOqdqtdVJxYRBZd8dT/OJJDcGJZJ5H1k4QTvXcZ0EE7TSAdJoiuRBW9j4IOshiDTydZHnCJd9AesE7e3ezPQndTbpBz1dO4M5pnEfrWCMyu0I287IYp3gHRRqAxl4sm4I4845lfk2PhNTKaXRTfC46GM7mqKkPzw3HmEfZZ6jHalLCsG8%2bPkbooqmpN1qhKq1LefSLU8xwy56zinm0Doj/A7tKa3Lis5ZuhYzgbLXYX6DJnPauVZyUDimrHUix1VSSc6BfTT7td0w2fOS43DTJPaRBLMVNvoE4cw0PgPau3BjVnw1ElP%2bNm/c/BToqD5fH2aOWJ7Cae0YYoCWrSvwznNsnpPVKmtemL4Xx6yZoBvUthSa0vnS2jza7/M6KBHqC/B/40iRYAGlZ2JxaYowycUa0G7y/mTqNhtL9tm5%2bSyTSrmGUvm3SDh/EjhS5pQho6NV4iBOK9w6zvH5Xw9RJhl6PRfHt2L4bU/tIG/5Igt1AxfJ6UO4tI1pAPeL64%2bhajmYODG6Zw5yFla65%2bAabRtZ08Ze1joYb6a4yeZVFQrNB1vtwABuXvPeQx/HV7m4OvLv0ys5bHkRHp7QjADdRjDvZ8A1Qw7an2eX4nlxqb3qAPeJH498nF3NsX3KZNkS9CgabRdwS83nKSiPObDRbj1DBfBq3LC81UfwxASDPvCBPxLCeSzCr/7lKU5Oeji7N8XVxztIDIjjuYk15K5Kq%2bzmjwms1LJLNzDLKyU1ezcK3H0pQJ%2b6%2bL0ZvuG5ENtvCTH2QuxewYu/8uf/2vd/6Rd/sC7CVPfOb/8Tv7j/off1P/ojf%2bzdP/GvAu7UtttMaAvcf/1zcyy3OuIe8cSBL1IZaojaF0vMufJywI4WmG935O%2bMoaAkwbEfYTfTJLSTyFREpT86O%2bjhAkdRB/ubK793DQ0BlLcwOdQ7Vr26Hfuy%2bWZILmMySY7BUBNm7MPucO3iyM9s9JVZ4N3j882hj8n48ne5kE4nOYZDX/4OBqy2Rn9W1ZXluSPuMjczF9PzHAuCFpaHv%2b/gNoE71yanwPufJGgNxeuTzCPyOfwwEoakyXoIo1gPcgdheYHU25bBHOUXSHxqjoGomCLxB7LQhDkZGrWfE4bKasppIWXAot2pT42kxQRApJAVtZOXHo/Q1lrAUbtwGIBi2UaZmCzwNomttvhNEyQ1XWVssqvo1xvV0Cj1sRrd5nk1mfU3mwhtQqFdTC4Bdp27TbJa0/t%2bjdmT63Cw1a/wylGEL91M8Mk/4wD7lYQXQRXJlQgVAWvrAo91d3Hn1VN4nCnmA6m8Rsbd3dlCNR6hWvQFkDv9mfx7HTSCoJ2gSVxhJqhmfTi9eSOR1LQC2QHq2PsXypLbjmIHAYG8Zc8nA8AXuKkXbZNOLyF10yA9su7ar0DnHPMy/5CVrl4NUD1R4NmngO/67gJBwERUbtJLZJmHne1MwrUItThJqwo0%2ba3nifZPqkxmE%2bSlp97UFryTISF4pwRG9OzqZ80z4FkTrHAKsRpBG54X9izU85ynNvnRQY9WhWbsTNPVJrYbMmnLEAEm2qbUgJEzEKQ0KqTKdZtms4yvnUqoISeDTNZYGWh1j5GkUSnuoo4dkU59l%2bxG%2bdwmvUoTm02R3SATjAqYN%2bdqN8dvJmurwbjpUHaMrkfEalcdE2q386JNQrdjmpteu1mw7Wj/8jtNxt3OM2szhzxtyiguvd%2bUy5lCVjw%2b9fBN95hLY55PLNtOz/2%2byt9EBteQDmhfUGceuwGQRFWRIcQS6RTLyEa0TZMClZmUfBkjm5GfdCqMJgN0BhdYxA5a1QCpO5GhFFV9FP5EjpnMumj1dNO9XHQFLy4jTYKLlj3pYVEnRjxrC1hnPwyyvgB9Anv2cfYJSUb1NfJGd5PK76DdcJIR3azUwoiQFQsB7sK287tMCA%2b0WibXE36W0kOy6nTJEg0uSjle7PQEuDvLU6SUy0Sa6KqSHpWyMamzS6ti4win9JCVzGzqulpPwAJ96lumUhtPXWCoVY81qZgPZbX1WGKgQNa9Ad4lCk6Zq8mLoJ2jLZAqgH3hoc9NhEurSJPARPlMfCLgXXfDpwCLGcrfXWnLGulZSY1cK9CpTjAudzFoF7XWn3aP4ggjeTfqW8/2ZFt3jbsM7/t8TraernA64WhETa%2bH12DnrMblXZL51ZtNy8ybCIOs06ZeDWvj2IeQ0txoLgvEuz10T%2bfwA25S1SmJfTnJ6CTEQnAZ0szDImEEqsLtwxy/9Rsh/CTBA7%2bH4dE53DY17i7OX/PFlciTgwTIzh4IsJF4Y5qhO9jHEfX9vQBLWiETrxEY%2b6uALEGzBdOmaXHV0%2bRpPngZ92jH2nCBsxCHG0SCb/aiQ5OzaHA%2brjnq6c4HAT7/yc/bJU3eWE3j%2bkHiJFqVm1zKK54eV0SfAbB5qpPl%2bU6BrfkA03Bi8gqA7KEF8PauGUkp079OXASPlXjvhyPsPR3iK/9sgpd/pY%2bLoymuPmWAu7l4ro29A08Sx%2b1NF6tIk7Sqg8FElNm3chcbG7x/MR5/F3Dl%2bR6id3oYnOHFX/r4X/%2bhL3/uT9de7jV2%2bKaP/L39f%2bvDT33iL/wn7/mE6NsZ5q0Xt1XHEZnMIq9tFmnPwxDdL392hnSnh55f4Yl9n5XRUR6rnWL7fAXe5UiHC5S0VzR4QkLVDjC4WGC50YFrwPj%2bDnByphPVDvEEOzPdYKIODooFTgJ1gmFfE2beLHSyw2W1XgPCxYLodIzJzhCzKeMSwMaGj8lEFVpSEMFUPVvMOHvr9dqFzTaSibjW9kz8jEw%2bri7SBPKvsQoWgXtZIalKBHcdvL7QKmmVm%2bNbHqfHdSRFLXpi4zeH70VSOGMF3D1ExRkSAnXzqFwXoQD2DUTFGJk3RFhcIOXzfCxAXoC7a4C7tYMky2107XV4jXZyhmnuBtT1qsa7Zt5WUPASe8mxwsXF%2bmXbc7M%2b2lzsmxUshQlbS2qtv2MlL6uuJb8lPu4GLBG4E0yIPKCxiWhO8o2v1//k%2b5aRfzPAruHXlWyKn5MF2wx60b4nGmPb6zs4nXu4%2baDCD/9xZv9UcN%2bWAilnacA9CFFlDsrzMR5/Zgd3TjJ4vQtU8YbMpNVUQbv3uIfibgLvWoRyfIFqMRD3FpG08O/EJIzOmRxawr0aoLjHokfGJUZcYEyvE4mNDiDnWiAbA3BjIG83tgQ2BNh8jZ8RVn2wEhDKis2B1GDZOTu/EqB6LlUf91EFd6eH972vxAe%2bKRcbPgIBDQ266A8TeAVnTNoFOrJx7Toh0qwQyUxOmUwVo8gd5BWL7xCosGBMF45nmMfC%2bLYbBoVjot/SpHTJkWkwVjUwNEHyeqzIXOBI0aA5iwnxb%2brXbHnXWBkySL9czNHpdnVhN2Pe9i8LUgkom33uzX632RdFvx84sqnnKbM/2iiYVFRtq42hXXCs%2b82l/BPriGNup4w9w85bEE8JjmWerQSn3hQYWl0%2buwZym2PXjnsrLaubuMG8i%2bf%2bI9hCHudS3oqdFBtd8FGb60ttZQCgbJqMjt4umY3gXT0vy/hu1F0wQ3b1vmzKNbGVzL7myFAW42AZz8VxRll3rYFh7fX4b64lkrDqFGotaZyoxmWBbd/D6bSHqHsh63BYDlG6Y8RLF37ABP4%2b2r1pHfNJZkO0OK7NlKbYsUKQ97B0Zrp2FQT1qmmn/KXlE9RraIfVSWmy3TZJqdS3S9GkkBUbO2gHSS2F4Roc%2bQogRRoTaGEmzu%2bSHG6lMux7xst9Hbg7izNkZKu5OcMIUzBbTt2hJFJVnollotxi2j8ywbOzLW1UTI/h9feUdW7M1WYqvzRN81g1oy3zsCvssUY6jBaeex460Jnq6nIHTfXRmZG/WPIQy1O4AtjVkrln5Cr8/mxBpyvV3NMeUiIGMi5E6C/9ghsSNjXXZBaQE8BIUqDtS5EnPmQTFDqICOhnmfjS275v28M%2bt8Cd36XcyPb/2nLYjBE7nGStibkB8LGINbpj2XaqHqRdzHiywJ3MPO0mWezJY56hsThlX6bGnZu3ed6Cl8eYJa4A95sPc/zWr0Xw0gQPoy42T87hdRycvdbC1XfGOH05gmfKr1rgLu2eZWhvHuCYSLjnIR4thTU/5ebT3FnLmmuLKkC%2bUwAEzNKCBtGTbK%2bNJsx3%2bZYlafg%2bQTqPQdDP122yKkH4vin8VDBHY7%2bL2Sldo95AgcmRuUF42GDjecwjk4uxecq1Tm3FqmEXk2BiKuvy/NZ7bYXisA/36gTLMxfhExU%2b9A4frXe18P/%2bcobslzy8/uoc197alrVON78m6kprSEqIrqhsjF3uEutu24BRs8TF5i7lXEtsPuHh6bd7iL65jfYRXvzlH/6ff%2bjLn/vP3wjcn//IT%2b7/4A982//0A3/46T/KRJ1LIbDGsLMDi84ybC%2bWMmZn%2bfmXSwk5DMIKw66PznIpIYKz/Ra2Hy5QiQ/6EtW%2boaCOlij2W%2bgaUO%2bdrLzRR1aHTq16Zpxe6l6u447/SYKEmVjvnOS4vmvSmimlORljsT3ElECcOGXAyRiYjlfRAtmkcYD2fWlU2lIRxPJ1ZnLzPZHNzCDFeCyK5XPZRFBK09UAPW/OrZMU556vwJ0h/9sBkjDF3ZmPB9M59hcB3v0eB8N2G5VfgJuegcdJY4aNgWbw2z5u8qoR5udI/C1E%2bQipv4W%2bd45psYmwGCP1hyjiC3jtDRTxWBgUfqaKL1ZlkdfKgtMSzYJW/hYlKnRW6Rqmm9dvmYIBizjQ3shYOjYCF3KezU1ure9tFNWqJzICeioaDBu/fhzbvbieKtOjenc65NSAaQ24W2mAZRsFtDQ8u%2bmew01mU99s7R5r0G52/nIMKfCkwJ2/KQluFjCFLiKujE6CP/fnMnzhM6pLd9%2bawlk6qOhWcyVCcTqGTyuo%2bxW8rU2U05EW3CBAp/vLpK/AuPSUdZ/ydQ3NCbven6Ia94SprzsbWXipKEi9%2bgTOYAvFw0RAiIDvsQXf6hWund0w5xacEwjQp70gvdXw7ZMFopnSY75vde2vBajelsL5WiiMOW4UuHbVw4c%2byGSaFJM0wJb4Q2tYMDyI1PVivkDJeg6VK4mqRV7JxpYLYdKu0Kp8ONx8stiSgHeViXXpTeZPZBPAfmlJMtW9q2RJpgHTgSwgakxPq/FTMtGVWukCs9SHX85Ep8hNTer20Q1ZIEVBQ7yYo2WE5GoVt0Ko%2bq8348t07JN5fxSYV2bU6HybhzDzlzBqSwJM97KtWeOz9pYy2dN6rte9480G0lqDND9WH9oMXhuBkLEqrhlafVbAPus9mM1Dk/W3zL39mTq6ZfCQ1e2b5tZCcjwJA8zq02N3NK5UK7Z31dqWVLPnZucCbjAsiFu/OzIujWWltYZcRQVU087oDP%2bG1VyibhLFNUmqUl3asJ0sXiOLuAWUtCuuCmx6dABT/%2b00G6Dwx1gsVQdL55Qo6yEPVtUHg2wgzDqvx6eGvaU9L3WnYqHn5UO0A25cjZuJ6MpLOF4HHQLwvJK%2bL77sAX3dqW33lM01Sa2PAu4iuZFkRcoSSzjhEOniQtxlpCKqc440YMacglWxQaTNo9W1c36cn4ibGWuNSB4L28N0KNrlcoyp1lxlOH16vf8r7LXFdlLMDlQWQjkP5way8nzOeXsy0zW4ZqxJxnEqNIQU9bLugj7tZiPBmxSP4HhZtSYAACAASURBVHS24MSU9GwKgC/nI1TtrcubzuUJEO7UEQImxdKCEp0d2XisS8N4rlIwzgB3SvRWD7LuObpd1bZLhNf1xHnPrqPUxiuZxOrqxrK2pfMTNxYE7M1iTvwsNe0btH40BaNE224Gr2XjpS0cD0mWC3AnM0%2b9e14EyItECuCpS7grUY3D8wq/82qJ068CO1c8HN5aIBo6OH85ghtoFNkLPIglpFQjM4nATMReppjcuIaq52E5imWzwFQhgmk%2bCKhtoqqAb0Oz75G4WJunDjPgsQC4mwFXTIHG5pRlN2TNfmQ3LqI6yUv097sYH8VwfXWFaUZE2X8FF5pNwBVDnthNA5n3VbjbLiauSGoOmdYlibdrsQMfKO4PkA9mSIsS7/pGD09/Vwdf%2bVyO%2bLPAl351CZYHuHLQQtoAcrIpyYDBFQ/nNzMMrnmSjzAcNIJVZt5ktHr7oMLkvo/%2bW%2bd45j1t7L4voovi/V/6sz/3I7/2j7%2brLsJUb1VYKfWzv/Af/5We43zfkuyhSbZaXxTtRGkrgElIyAV%2b47enuJn62N0IcGPHFzvI5gDgBRCEH3kd7G6o1GUnW6LabcE5WcLdb%2bF4BOxtAATuNit4Z0u91Udhp04c4trKE2eCqGVEpFPbXanJeCZolw0kvdxN2G3ThN14fFoNbveB0RTYtJZL1MfXfq86UfB5k3Vf3%2bARRHGCPJ/leGXpYn6RI0WFO6McG2MPLx4l2E6HmDnn%2bPALXQw3Qzg%2bE0kc9DwHRT5D5LcQRqYMrgEL1Bqy2l3qafEIfegqUsYT%2bO2mrtlFUE5M8SVdoJrMFO%2bRsEuP3pzWrBBBOoE8ZTOU0/C5TOS2I6zHwhoaNol4mP9Ee2pOl4uzJOc9irFrHM8m7vFvrZfnMcyP8w9lNeKWY/3YTehQfsskARJIiLTRTB71RGdOiWBxzg0KJ7qUYXPrPGKSfkT7Xsm8ZVnM3a2WsAwvnTr4T78zAapA5UfPsFwdUBEAUPBHkHl%2bIcWKqouR6tqtPaORv3iPBfKZaq6dzrvuo%2bAsJv8OUPJ7sWHPxbNqBSYr%2bi8/FqF8oJEjxZTiFweIXt1IXaSt7c1uNLzR04uufiG7ztV9sWPoFr3jgOrtKZyXA5RM4OzkeOY9Ed7xbIG3f6OLhxQWdqljL7HTUuBeDQt0sxIe3WHaQFS6yKIK3SJE2k7UKssv0BIGT4GAhJ7bGvosikoSx6Raqln8yRgKA2bLQxs3mmGbhc%2b0mJt9SCjfXLeXj5FRTlZqMqHu4LQ94niCsDV4QyUViZ4VE7TbPQH7bs5/d7GI5%2bjw73yOdrcr2no2EA85n89EP02gxSROPqzlI8%2bZWni6pGhiqym0ZJxP7O3p1QWWVreUXukE6kzarN1ZJEHUqfX1Y75nfnMmiYHqz07vdX63bpdH5bI8YmK/1FsaY6750SYTvq6NX49WN3%2bf45/J5KsF00wPxqlIom1Wl2%2b%2baC00m20qd9GchJ0DLp2fBTcSMWMYVavDCiCkjCCN0W51kEh4oRJ7SB6P1pE%2b5RYyJ2jVT5HNZL4A8ibjKeeT9NBrTTAhwOa5Q6VvuTtFNh8i8ye1zMKOPq/oYac/xTTtokMNO91T6NFupzgzzzqUx9B9qSJzutK2k0WVSqnGSaYeF2TY2xbYq6SDjLt4swvjXqKkl3sx0pySVh9BOhb/7zzYkGiTn5wiDXalimqrvyN9TKbe0kGnVGOEbnGCGXbQhf4lsOr3KszmHGM6nDiWmw41MvQsZ2MxkmE9qYXne9TD04mFfu1NsqWpwpkzau0RpOlB7JgWprrtYsa/He3/8yUT0lXf022HqBYnqNq7qCiRYcTAaPQ3uiUuzNpeVh56HWMNadawJn6x/u4kIB4VQdLXNOG92UflVXO9lLcEgSs5AHzQyeZRjyYwJ3CnrFY1/QaQWhtIs8lZFV9SfXuW%2bsirBHHsSd0cWlEz8fVi6uKrL8eYxR1kkwInd2O0N4DzVyNceccSJ8K4E7jfR%2bvak0iP7skiyfHDBFXRuXccpKOl6Mcfi4z0xJBtdqPNmeeoUHAuq1pTclsAyX6J9tHK47kJKczHdUxUFTb2Org41EgzQfu%2b4esPUeDA6H%2bPKBO2RCJdyfbamB7HOmbtpMRCocQ/AAjk7e9ItOiBg9FBJcCdjxPmTlm9uywK1L/34O3NkMUuSr/E448D7/zOHo6OM9z7pRS/89Nycrhy9dHAnfaQg6uqdxeP903g7FSPzT5FK0iuj8yzY1J1vj/DNzwTYfjtXRzs4v6nPva5Hz/8wnv/ku0vDeD%2byf0v/vM/8%2bMAPkbg/nsVGWh2NoIZToi/9vkp7uYh9jZ8XN/iLtCwpw7QvZhhttGTDryTaK899jogKLeWjvaYu5lKYA6yOY5YvYUshRQKWbHrfG2LmdDU09rCBdS1T00hB9q6LYDdoU7yHJwipaFkhgod01NER2fVB%2bZ9Ant%2bvn6YMJX4isr6b5pshQMUIE9yHC0rnDseFpMcd88zJJWD4cTFRebj4SKGNyvw/ne20PEDSYzY3HDhxTOEHdp4UbNIWy5KCJhX7aFYshwxK0QBQX6OzN8UZl3ssOwFGTQsy4ddpOQ8XWHMrDxGst9Nx31z/lCvWjR9BtzyOSUNdREB0zCXMHhjYFqpjJSZN21qk/Dkq4Zla5afb26Emtp5hndrhtWAyuYGyjJ9j4qU2QVDNJRGFtTst3yfLieuKfxiounanxwHi0xdKcjcayIaNx%2b0PnTw3/xVD7/4dziDh3AJbhMdkNJG1NRVLtz2HM5wQ7PVXQfl/QzejQDFHav4o01kgPJ%2b0tgVmTOUziZnAljdec2eG%2bPx3gyYDCWx1dneQnWbIkd7Z21mpdmt8liyeTBUg1yzMcm9GQJPm8pTBOzPZcCtANVbUjivKl1S0F3qHRG%2b51vp6ehjc2sp9lZuPxTHmP2ObqbyzIOzmaIKOtjEAlFFazogZ5GlTiUa3H5UIJICSSbcLoWabPIpHWdYAGpag/f1vsc25gRO%2bQzd0jieOdbZYF5FoD2sE9157jWrviTAHggwpxWgk00UGNGAl3NMPkEuQN/I3wpWqhxCZDXmdjDkTJ08n8fxXEC9HS/8YnMBYr8Txt1XqGElIBI5iBi6VsAn328ANxaP4huSDLs21qydo9opasEkW2hKgLGJFjJaJJ%2bho4s5D3qu84cmBPUG7EtxpcirrRe5ueBvcqNg/dRrjbs5FwEQywoDsrPNgr3m/UdsFd/YvxsDURZ7Ix1qVqC1rG8Nehv5OpbRr/djVsLH%2ba45yE30TMglTzWvoq81AJkWvWyrWCZKOgwBgVuhpNd7OobnaG5SktNcwBxbLlATWPmYJwP0ImreaTQwQOaO5b2oWoVoaekofSDrCrM%2bi3voiv5dGXYv6CBNWaFQGW3Ha6Pjq1MGE1YlKiVgnWw7wbg6yVhgKVa8BrirNaSDVlCuSWXU%2bYn9xYv6olv3szH8zobxY9dGseRIM9ol1UTFPULHGXsuz6tTnMLtbUu10hq402jCuGjYOZVadbLndhzVFJRpwxoImwHENVk%2bLzUoqBfXSq4Ld/uyFp7fj8/gdHbhUN/e2RHmuu%2beY0GZD%2btOGOEDf4MAf7qgUww30FpsiYcgfrGuVSJRkg3Jqsgfr1rcc9pvjou0SJOp/FqjqlVnFPDb8F2XXsSGMI1hjSP4ujDuttiS9SowygJLyJG5Z5%2be07udCgOpKl6B5lppzsJZnAwGmM7mAtzTqsLhyMWXvxpjMekgTwucvD5Hd8vD%2bcvhinHnAPEUvHeuPIHlMdl3ZoQW6A73cO9KhPRUqxHbh7DKeSkB3avwcIxCbFb5aOrbKW/ZKzzE2xGmZzEcuosZbapEus0BFaD7IiF7UGTYrzzEey1Ex0vE%2by2Mj%2be45lH6qKia3z2BStsEc9id0prmvmbydQibHyxRLAeYRLrRJnsvCeqUHJnE1OKoC29fI2hc38cPXdx4vsS3fLSH48TB6W9O8cV/0MXCXeDqYy0khnWSLWZBtl2d1ayJhoxbs47J31ytIgnu09QFYQN17k%2b/y8Hu27u48S7v/m/95Ov/5NM/%2bmRdhKnuYj/yE7/5/H/3J7/hvwacjzFcyIO9iXTo0tQo99kHXvzyHK/GPryqwgtP8eSB9mSG%2bUABO3%2boDsuyE5oQS3c2Q0y6u6TzzByHYVeN96WnA8HDMS52h9gOgItck1YJ0HnAISUudvc%2bzWtHKH6VnZoA3CYe2YEyNA42DD1JouraIJMwi0gs9A35v7GOoywqOE1RHURwjs2uQRJpXUypmw%2bBl2IC9wz35xnC2z4wqPDazQBhy0V8b4b3fEeErbYvxv5lWGHHWSKMWG44VFs92oC1dcJZxB5aGGFRbclfgngJLS6nMjHRlzbGDtoYIcYW2qAXZoXY3YKz1IJMdiIQHd0jgPu6CsDumvk9659Ox6jrW8yMX63B1MRfSmi1mq7GRGSark7Ek7Y0IJid14J8C9btc8u8X2LgTPEo3h9eC39GNgRWP9xQijQ3FfysdY6xoUbZc5n7nmRaaMW%2bxsFrHURE7ypJPyUWWQvdMMOw5%2bDOvIVP/EiOi8%2bzVFokkhlSG5xovm3awS%2bHMfyDSD3Q%2bVv9OappH85grgCaYJxJo/SiaiAd73qI4jbFig2moFlAyQ4aOaqZOdkgXHXqTH2WDqVLjWHe7Wi1HtO2UxOwP9MA7E%2bb3c1NA9pvknUvUTKaEOX44B/p4dr1DGGvlLmh7WZwB5GUSidjsNsF8qWHaiOV4lTUbBModUoHmcd7VamkJqfmPJeFkM97ZOYZhjTo1drP9Turcu6ykQyBMYu7mdBrLfChXK1NuzNHKjzys/FijHZ3iOm8NJ7NLpJ4igwDBJggqQYC%2bAWMNCNZMp8qgOlGJWaJB1/ySTbgkYnv9IRhJyNvXbAI4FuiA2MofI5upyuMfukN1XkjJEBQFk7GA4GxsVe0%2bRTrmmB7i5rstr2N/L4C%2bFwLUxHom4cyywSjuvsgeOfDFjKy7L31WJcKpg37S4kgNDYUogs2mwTL7Ivbi92Ry/VUcj3qlK1jhw%2bel/XS5uusyDpo6efsnC2tbxIrm9VpLZBvMp5k61kfxEprmmy71Jyg3atJUrXtTFcTqWlRsM5AibsnPbzSLhE5Wv3zbamLnY0ZNvoOlszNYFXthSYzawSX7iUaEY2N44yZwjBP%2b%2bhHU2mLGcF7uKq94HABI4jLu3J93VAdj6RlCJwD7S9FpiSW47cFUDNqywf7JWMrQTHGohqi39JEU5XJqPxKXJak2unK8pGAnvpmsu18n5%2b9rHE3FVMplTHA3etuwI1HyMINORDbpVeeIW/vwF2cIA13JJGU500dOh%2bdaixOZxpVLUTCYoE72XNOR3ohl1Vm7DaUwNCVo8lac44eT1ev69zsIV%2bcIehty3fIQopfe0JJC91jTPKpmcspu%2bGDrDsZd9006FbBXxwjb%2b3J6fSo3S%2bH6LZ9HcOMUM1ZoZX5AXraJBtEBtSQ/Giy7eWKqjXZ01j7fi/MZDealyCH0fjze9St22Oy31KCZNcsuRyDV2wyr8U2lnG3VVQtcGeUgsTHOGaCcYXDUxd3jmPcv91BlRQ4uTdHd8PD2SuqcT8hgGdUQ8JNDckMWXcabSwzTJ%2b4hkmZqo2iuc0s4kXpSvBwiWSbrn8OZqdzVL5bM%2bQE4B7zjjbYaUzHIKFznMAJCbyrWi8v98Acm2B/sNdFcLjEYjtCZ5RI5PvIrWTJszIcngvVFWT6ea8o3TEITY5Ekn19Uy9vyIsliniASWsizH11MoDXcJcpjnvwDmYoDnuy%2bU2CGYID4EMfaSFq%2bbj/pRgv/kwLFw/nuErsy00MMbQZA5T2UCrTVBzwHNnPNjns2H9yfZ6lLrb3uAYtsfOUh%2bHXd/DOb3bvf/bHXv0nn/nx594I3D/xY7/6/F/%2bwfd%2bCnDezY4gu9FH7BxNe9Z/2JkoX/iNF2d4dRmACvbnn4xkt8%2bBcUE9UzzDbKBbbt6yLgH9sKchTHbGhxcYbW1gg4tycwfKnafJCubg3jobY7o9xMzo1mXSMwCzNty3bLrZtQrbYna7koRizkFvolZd03%2bZSm6OTvanpwl2diKcn6Wo9kLsFQ4uKPg2xR9k7doP4Z2ksiOlfWQ/BF5erIB7dNdDNQRuvuIjaLlYPpjjm/5QhHZJj9kWyrDATrWE364QeKEkI7H0u9h%2bxYZtbzQ4GXipqNBwZbgkNCcB4W6hg5FYZi2X6qYgus9HAfdH9mQNr/Jrd86BJzZZ5IkSB713fN1q4k10sJ6jLQBpJtHxTUmWWyspz/tsgXozqc7e/zop1dI0NHFhYl6DpbHf5%2bsczGTMJMnIMvW89DXgLs%2bNR3snyrFMPbnfdAGScWyTVo3UKBNJDYF7KONh2CuECfvRT/r43C0H6W9DJh7nrRnw1RDVEzpiaRfJ9qCspbiXqLyFQF5YcV6EgZ5NmsHe6wabQT28AH1KYB6lR7eL5CWUJ7nzerQ3UJBrCpqa3QfQBO1BKXaXJRfl5yN89AMphtdsqfYSbJfNA2WgCOSJFXcJIocZuBnaqgCu88OOh8wrpRKkfJZJrK1MpDICLKwbhqqMtC%2bZJJ5eV6u3WpAi7PtaDsVKW76SochBpJ/oisrNAV9g4ZI%2brdxoyrOYoE0AU48vB5TXFL4ypQoaL9GsYtepwJkyhtU37SEU%2bGpoWWcUsqSFetU3rq2%2bLW8y/hpD/vI/m0l/xo9e2CU51dWGs94kmLHTnMabm9oG/m60ggELawmGzROxHuuXCi%2bt/VY9NzyCGOFmwHq4M%2bHPRkDtRGJZeBnf5oSpu7dMO/82i8at22qq1I4a3AplUkgI%2btbDDr7WKjCuQkRuidMFcGXHw6DM8f7WQsprl06FZeEhTWbI0UfLnSDDEFk2ETCfuQPNaMjmCKIuikzZn7odayqZ7GcXg576mQsITRfK2gdkOxXI2y86QVs81smo6/pE2eMYYWsomnOy62TRrUyGBcS46WW70bVICD6TT0GA3%2bJxrC67Tk41jDut71p9yZ2SKsXuBno4Q0ate8ltqyOOUIxiSbEnnhdGqKJtSfzkg3VGpPgSpW3tUj4rESZTXfViosB3/cHrt5rtZk6IAHJG0ViHygyrSexJ5Wp%2bnmDb6W5K7oWuZaZTsQmpc%2b9saXInzjFzN8V2MTl/iKKzt4oy1gNQR6ZEvqpzScDtMXmVmxZTUMp6uttzkQ2sSdC1rzVB%2bIRFpZgQa6aM30vjXw958w/KZ3qdoE7OtVIhK42xEXMhvIwDjyXUROpp1z4WbiKJ2GDcCdwZtWbO0DguMZ4H%2bOrNGR7cJstS4OyOAndW%2bj5/NRAGXLTuwrg/NHIZ%2brm7cKsSbpJj8vg1zPMMLiWIBoJL393uIjheItmiE42D%2bcUShVNh18hZDosCmxsdkWVFowSL7TbaZ0ss91ronyU49dTDnq4zlNjYnBfaNu4XnpidLPZaaJ8spXL6ubDxmsDKsXDV9fBixrxBdZ6hVHmnJCtP20cXR4aR15lZH/UyK3kxJbLlAPPWRNqQ0hj5zK4y7dlhDwHB%2b8Me8i517sC3fn%2bEjW6AV14vcPf/dPDwlQV2n2shYUXqPQ%2bV6Swyv5n5cXS7wOYNTwxDhhsO0oQJ0TqGDx7XNZLFCmfHHp771hSbT4XYfDbE7f/jzs985iee%2bG7bjetp9RM/9pnn/8cf/OCnXDjvJsvIxvj9APcvfjXGly9cMEfjiesRggo4p2elSQygrGXTAiqrUc/Va51MOglBTnIDoz/ia9tjdYLZHo1xN%2bzVu0/Boq6WBZbkURNOkvCaQZcE8hz0vJHs/Ge%2bA%2b80FTB%2bcppgiztDVDg7TbC9E%2bFslGFTOh1wfp5iezfC2VmCnW2C90QcCCRk1EhoPOWEYyrVX%2b0CDyYVThwf87Ey7slNT0rhHt0LEbVd3Jud4Nu%2bbhtb7RSlE2CLdpaujz5DRsUMrSBEFBaYLEK0nTPpWlKfBqUw6vztNibCtluWnZMqn3fKM/3ragWqxN0CDOtuyKNaMlIzBaYXLBJPHDj4YCXDxzeB1y%2bAxzeA2xfAExvA6%2bfA9Q3VvcvkHSmAt4sWGVEbOq/RUANMrpEv8pGadTHa9CbDJvpSI1NpLgBNlsO%2bzvtrCynxKsgyiWzdWD7yWJZVp1VmXYXPsBhWGqP9So8q8icJQ1ZYZJEUZ%2bFbaZXjsW0XX3nQwlduZvjJj7Mzl3C7ruad3iCKddTGcd7Rug6WHjabqDcuaeaV9Ubiy7KQGSD%2b%2bwV66w3H37dyGFo7PpfBec3a%2bADVMxkcMu2OFowpFxRRZviWf7ePF75xKdnwQlJzg5kCwwNHJx3DHjDvPKEt40aGFhkaspji188JCmj3NQk1KzwMWimy3BVbSGr%2bRBbVyKWw4F0KMXXVcYm/ozIuTaJbQWcXPui16yAp%2b9hoV1jEY6RQEC5hcoJAx5EQNMG7/GUiHee5YoqLbABG44RckI55GeJ6%2bUQ0816uE3nuMgfBfmb12bogjHGqoEMIx5aMjUdUSrUT8OVtwKMg9eVeI5pbw7aTUa83nI2u1LS2bO7r3vC6efPNAH7zl9cT99bnkjf07bU%2b3fy%2bbmw0Sc/Kdvh9aSeTdGnZ93rBaiS01m3avFUydmkJyqRxFz996mHmBfitzMVHd0skQx8nCQv1FfjN363QilxJkPveXoKnribCTB7PPXiYIa966uhRR2apYdbiTRqtZaVgagK1Af2gizydwQ/N36CDLKXdL5/zb9/81ecuX0%2bmaPsVFlUXvcAU4ZM6Adoug5ZGqgjqxS2GMjOCeROxrIsGNQoxtVgTxCSYEuxLcni0hagYwY36NbNshrIA44LAnXIvarSXI0T9HUlMpcuMgGzRr5seEtOdRc2ombBpcQk122TOCXz5EIZ9rgYO9VxvwDvftxpvkYZQy02ZKhl5pt44Hqr5GeYu3WJ0DeQEzPonTD5VWYz%2bcq/TqAMQq%2bOdOmQ1dlK8P8tTiSSIJIne9aKrL8Sznt7vpUhVVXNf5xca2Q8Td3XuUwwgPup0HTPtwvdYFZYPSYp9475%2bxaFYDCF/V446YmM9e6N1M/MJeUmynhmryZp9b9hAvoFxjz2xV2YF3mlc4nwa4PX7qSTEH77iYfqAGne6yrSx/84YIyuZ8SgR0wqqDtl2SWhkIaYC4xvXMC3oHqZ5H2LNiBIHqYcpMZUkUQDtUYbkWgs%2bDUl4/nRT2eYuokJ4mgj/yMdyp4XeiPV8CkRMEDezKpuPwburcHG7yHFgJE%2b8radugepOgPPrBa44wI6B4CfI5V%2bdiwidjUwINhJKZObJ6NuaT5TzEMgL1GTle8tvOSXKQw9nXhvh3gxk2nkewQ5lbCtAnCw0uv6eb3Ww99YO7hwDD34mx%2b1XHLQ2KvR3WQRLAbnMUY4WGySGkLUj9cSvffNigeIZFiq0hJiZ5Tj%2bJx5612c4%2bPohNq56%2bA8%2bgJ//D6%2bsqqdKF//27/3F/Xd9s7f7Q3/6g5/ecZy9fxPg/tLNBL99xGSeEs9fD%2bEHnkw4DG1zoJCRroGR9EJg42yMu0EX/b5fs/EcGwTzY2b3GlkMJ2JJEOKhPAfbFxOMNgYInEp2%2b3YHyslswwx%2b9jV%2bXju4g8l5Kg4fdreuTVih3I3gnyTYJHg/TSTUbO2FRHdm2PpTzWW65MjS3A1zg7BMKxxVBrifZ3QNRH/h4dbNEMvoCCcPevjub%2buh4y8R%2bCEC18NONBU9eqtbSXGiKIjQbuWYLUKzHlDKQfpyBLTVMabVXnm8L2iXaIx6FthEB%2bdYJmyvlVMC3VQuLeyNhVo6gFOB4L0dkvUB7lwANxjCMf2IH%2bdrBPLMNbCLK5ltstx8MGzPRFZrLWnDkAT31CPLpNd8mIPzD5k1q29tMhpk0hcmVV3sKs2kKfeEIWrTp3geXEztg44kPC%2bup7KrbkQo6BzTaRWIE2VG%2bRmy7XV4vAHaJTk1o01ZByx3zs/HeQbWLjgYOrjIQvzt/73Az/4NNrY4t6EicCfjTikKL/pJZm0%2bEuOtNcj/T08t%2bmqiMAPYBahb/forCtAtbVI9V8B5SXfN1NpV1zPgDvD4%2byJ89N/LMJ%2b5OHvgIs8cbF9NUSwrLAY9bLMy7Hakob7ChX%2bQoXcYIdtKxRmGk1Kr66FbaHU/C96pGx5GuXhnW8cMAeWsEmo1yJw/2iUupj56XXV7YCi/iOdwwi66UoRJb7DmeLhI0gl8T0E1AfwF5ROm%2bfnRiFIZDBFhjKXIECxjTV2pAx8ztCiFachoLhV1Mr%2bzjCdotfvwsgsUpqbCZbAPSW6lbl5sdYsxclc18yKjSI1NZaLmY/Sj1zIgZJMXIsfRCOUjmP16fr8MTExXr7cTbK91YF2PL7No2V4nDF/ioh%2bVmCQsCmd2m2vj9lKA518D6T/y8437a%2bU4PA9h4c3NIqvM7wpobJyDJZNEHmMS3nVuUe9/bmZkPcgz/I2XIrxC6eWywB99HvjO675aG4otc4FXYxf/9HaB33mlQhx5eC6b4weeybGkLCQleKkkqa85N0iz1YSAo8WA4CDPZgLc2Q9DTJFAC55ZVpLRGj5CzJCgjxAT%2bCGtJWy0l%2bdvmGDOlybXQrXXDrr0ZTfRJ0pl5HUCeUasRBKj7SWAPtBxMYsdRL0u2sUYRbSFsBzJ%2b9S4B9k5EmcDbn4Bv6tsO9dYasAHHh3LdqUok24SHHRMQaY5K5qKC4pOzCIfkYrHBCeFSND4kMRT0z9k3Jp7TntHy7xbVp5SG9tQ9ESX6JiVsnouejhBjF04yxPMDYElUjBnJO4xdQJWwzZRTkKYVA/e8gxFZ9d0pApefIqMhZcYIaB0ptrSolDGUYZtxE2FSHtrSdLlYlK0V%2bQ58jz2t1fv8dqkv1rb%2bAbZUstyufmzXu/N9x8hjyGYZw4BOzXXsn7XlwrtdvPA9V%2bqAUsRpwoBXYgydZWZN4A7iWrsdQAAIABJREFUWeDzZYDffTnFZFHh5GvAcbeLndEIbtvD2c0AnjjLMKfAw5LOMn4gGyhNUCXyps59Fw%2buRFiexsi9ClcRUGiCe0UhWvRkM5Igcfs4xgOvwhULuG1Cf1khppsBOZ2TJZZbLZE/d88TnAUVlnd8tG7kmoha%2biig3vpk21u0F6ee31aNNZPXfajEiL/FAxPAsw/x/3ulJqczgZXv7tYgvxCGn6D9mCpR2Ywx2qCzsEuzB/tYmwMTRn78Ei98Q4DeO1oozlOMbiV4%2bGPAvac7ePJKjLTdQVpW2I6Xtcf/oadA7Ya3kE0OXfOey32kmYP2Ywpg5vdCOY8wdnH49ASDJ5kUG%2bDf/x68%2bEt/6qc%2bbKunytCih/sHPnBl97/8%2bAc/vQ1nj1WNqVv9/TDur99N8Kt3gKwq8QduhGLkP55wL8ZED/VQFj0gixaZAd01r9v5f3g2xgWlMPyM%2bXx/w8dsos%2bVDVWQxH9KljWTY80BZKnRt2vGVV4S1sTBuQ%2bEJxnKgxDuiTaUThPAYQLQsZL/PooBMuhHJvtbdJKG9%2bTf5XaI9pndCADH8xIHPR/zrMBRQTvIDHR9enBRYDB3cOv1EL2ug6/dneHbX6jQ246wEQUIPRdlq8S%2bE6MM%2b3CKCcIgQhSohj9e%2bmjhDEtvVzTuS2cXWJxpFbjFOdBR7bsw7dUIS2yh5ZyLREb89pmfYnbr6wv4ZclIYYA7W3C1Gh9PDftuJDNk36lltv14nT2r8akU0TETeKr3Rxh5c1/eMB7MIiX8iV2QjTTGFo5qQpTmdS0zD63gsqWhTTytHF10L3Onq/FoN14E7jWz1vCIJnDnPdWdeQXP7SJOE9kk7PQcMXLJQgd/6U9V%2bMqXAxo7w6NmmNdDkPy1ANVTuQJius8QLD9lgPwjGJnVmf1r/KsJ0E0YTm4dGfNnM4CJpfxNyl/IpJNhZ8Kp0a7XmniLajnLcZF6Sw58PsTz7yow2wzw7rdl2LqhoJ0h4CJzsHk1RZVUSAc9AeP7nVg165kL7yCXJFRy3e20RNpy0SmBpO2gx%2bqUhYt2r5CCTf0oRUrW3dgFavKcYdXJxAtoIygAOixK4xtKXIC6suXKYqutZJJMEYYD%2bJggY3EcI8eO3DGS0jowrfp3s79KYSwDuuJyKBsGnU6UHBCJTT02HNGxtxuuTpTeMPnVSScoTMKrdJt8rEmv5nwJ3Kmdt6SA3mlViDePz3Mj8G%2bxwpDpwJa8nmcmw9JMqgR15mRr33o71mzfX983m6lyxeQZ%2bZhuLCi7Ue7LtpYtvnOp4JUhU2q0bU/CyIT4HRbDkgWJx1sdTLzICUhrYL5elMkw8fLtxlix/5TrMfMG8yfUHraLwFmKjOn/%2bUIH/2zkgXUx99/q4P17Fba6DnZcm9LGMgwOzhLgxSnwuc8UOIePj74jx/fciHGRELw7kvhHKYet4m1pU7usc8FnZUqSByQpeJEE50FE4F6KexXPlf2Tfbme%2b1jSnvprsG9yA8lk60qiQOy3ka/9206ZggVNFIIJqMK%2bmzHS9jUs39zokHXn2MjFOlL1syRIZIwZuQx/qNXy4CRnKHzmTxGMFgIO6WbD3yMwlzEpY42JneqxOxfbOJJGTJB2UC5OgJYWP4rpCVvpdrfbcWU%2bIAsvyXkNW8e6MQSI6UrMa%2biWZ5hhW/PT0jPMnS11/pIBRQ3%2bCDNsiS59QbBiHnSmkfOyDKpd9AhEJyfoDHeFpb9Uk0DaWEkBy6rLRkNcrjQKUFerNUWjKG8h2cZTFgmNeBQ25uwG5uOrUhW1GyJeasFGO/Zkc8L1iQpDY/DF1%2bqoryGWSDY6Lpl5FoRSeQyVx3NG/A37z8RUSjxISEWBg5TAfcF/a1EvOiWdL0IcnS5xdFQgXXTxO4c%2bdkbncFougnaJ0WuhWEKqY49mvGanDwDXV9UgCzEN93H3Sojl6QL7nkoH7xbFCqAz0qp%2bivKgjHK530LraKlSl2PKYyLVtkuncpDttTA5W4iHPJvSMuJsU0peDgoXM/Ndg83rNd2y5YuJj8kgwQF8nCEXrfueB5HLsCeSYef92i89PHQLRLRhhXrR85ZYgq867sm1hruaLF7fLHEp0heKzMX5EfD0CyW%2b7g%2b2xVVpeZjji/%2bIQ6DEVsdDvizhd0sB5zf2OpozavoU3aH4X%2bdqgjRxsHUDCA8VF/tuiTtJgIEH3D7K4LzQwqAfoXMDt8/%2b1l/7iK2e2gDu27t//uPf8enBGnC3SSe2W9ZAqqEVp8b94UmOf/FygRQlntwNKRlEbjxhLYP2RD7HnbArjcQm4E26ns1x1%2bsqK0a76YGP2Vg7eOU62JlMcD7UyqB2I3GxdLA/nWK00Zdd09lZim2GYXgH7o1x3u1geytQGQylLueJlq82%2bnXmldIJg2NtZLTXMlgMAFox9avBaNccvneyKLDf83AyqzRkaliYlk8fUB8XDBNVFR6cl9iIHdx8nYyhh5fuT/EHnwVa%2b210UWBr2EIZleiwop/votsphHXfGjDBxvR8qfqnE2UPM1T0b5LZgGb3dttRLwcy%2bTnGk9i6qdQTATcDZNajQm0QRcehV8b2JVvUBNf0/rVMud1s2XA/GXq633CCs7IZYeDNQkXm3h6dxZ4s82ThiUoe9PPCcLRMsmuw8u61hSgaU6IcZ57rQOP88GaAZF0SI9fYsCazx2TbxrQwXLPPtKFI2kKqr3OJOPVkciTTz6gMNaD0T/7s71T48f/KQz51gA4ZLdO5iewpAXs6F1tFAdD84ZcDZeLtfsNO9DWSbEwY67sOQXQE6CHwXKqbAQvU6QhDgM7NAe/s6wasvxSgetbKYkrSfvpo/i7X2txFGQM3ggDPvm%2bO9OkOHt9m%2bXSgTIH51RTXC9Wml0mJdNhD5F9IYt%2bGE0lhpVa2RBR2UG4m4JpKBj1iohwLx7Qdre7YreQ5PdZZLU6SkA2DyEWVbB2jSORROt4Y03SIHhO2G0yW5dGF4Swnwp53owqzxJFNIu/RRjhGyiSTRi9hcuqyVMZdmXctZ52CLL0jyasEVMrKVsgdTuQOwmpmeB19vdXpg6y7bUbGY6jfJJhfLC7Qbg0av6o3sQahZjAFDU29BM0NQ%2b/nU%2bT%2bQMP5AvT1RhGgi1SDUqzGoOiETKRVe0r7kN%2bizChcMeh2HubHpqlGPIRZlk2LthKPJdNLuqq%2b3NzMk31VQG%2bBlPS0lQxAvm2u1wBr/YTtcxRD6waNv/WGSJzNcTCyoi6lGM0xYJhMyZsxxEqrTYA8wGZ7IVUj4yTAxz8fYYsOInS42PCxM8hxbd8TbSpzkfhgVG7edsWWjQDnta9UUnjzh98%2bF8kIoTAjdATvzI%2bwJEh9KdYznm5JktVmWCJztTbRl5EnvQZGhMaIwsEle1MB8NUYLToiSQGlShJRLRa07LtEJ9geJrGbbWD17cwVsFIOwZGli5YUalIShQBeLSHPhQH0Wky0q%2bDnY3jdLaPHNRMSk8h5fwjqF8pOa7GilbWh9GcBu3T/UF2%2b/T/vtQXQtoKwRNLMznPeSLrsdx2M58YljXaNZMLp/tauNBlVou1WJpKjy12ItG8pxZHWzSXqac1qwmMX3a6Leexg6JxgXG3LnOTML1%2bXvR6JyJgEx6bW3QJ7mYOaOWbGdGM1wO3mpJA1Xwgy4/ZCAkDOvNREXF5XM7FXwHFjDFsdvfrdu4YV1s%2bQabfEk1iY1sDdUZvPglF7T%2b0hS%2bZ1OWAV6dO7S5yNMxyNhrj52RGGuwHcNnB%2bO4QXqa7EdXwkx/cRXXsC6anKZSS3TxJUU5y88ASWJwtBDHsUlZENJzC/0kL3cIljT524roi6vMJRXmiCKRlzAac6gh6UBYZ7XXSOljj2WQXAxRUzdo4NQ85t2C7Z80Kdcw5NnhelMyR2jtwCN%2bBhTuA%2bTHBQeThDgXQ%2bQKs7wQ58PDAgnWd1ABennBMoo4kphWtgIBeYtGbYzHqY%2brOaPKZkpp7gGMXcnWF86OJJAvcPdpAlJe6OPIz/UYyy67LwMPyowGObHUkWp4KlfZAJGZ7nDm60M/XXz4DFto9dM/keMxrGPIUAWNyr8NJLHjY%2bTNWKh93n/dsP/pdPfuS3f/HPfqmeT8m4b1/vvfsf//h3/1TLAHd2XslsZsliMuPWi9SEyMiWs2BRp6vFBU5HOf7FqwVIBj294wugJnCXfmg6I7U%2bAjWdCkxgoQk9Q2yW2TmbAVsMf1pNoaGlxAGGi4VMlI5uAM2xzi8S09lN0qbd0TZ2wCIbMZ6nZ4y2EPAxma4DUALDc5VFz1wjB8bJXM%2bdAP3YaNf2u/pvOZap4mYXSwmfJkAc%2bBidZUiYPDHOEZ57OH4QoN938fKDGd77goNBN4Jf5WhFoejc2%2blSdrmtjhaqaYWB0dkai8flCHN3Ez0BFaRjaG4POMsLTNwhBgT0nCzRRw9TzMTmUJvd/iXo7LYKnE6BnQEHOrW3Jc7mwB51%2bMzcNzZwom0/Z5KqJ5M/AYAkdFKLbuzwmgjhUeSxYFBxtrgsY%2bH3yJJT92uz%2bMUdw/h1y8TbRCUGB1hMy9vLSKEd/M1NsT0nYSUyJvlq8qmdzNl/ZsbjWtdYloo2ns0Npr0mahxWoVVbSAIZ31MQT8afJgb9yJFE4rAN/Bd/lVUSlliec7sO0NVQQPszBZyvrlhvuRwD5IV953pI3flbNLkVT1Hw1gDnz9KxxoyhpnUjD8RLI4NugDpe91fs%2bjM5nJvGpsLulsjKvb2A%2bzWyKeY32BAE5gwEPFEAh8BO38WH/h0XUddFPMjgH5nwSeZgepDiWukgT6gX7kn6v9eaYICWsPHL/gJB4FMBKzKYNlm9HjV/qpFltn3UNUk4hYd%2bmAuYYgKpDf%2bLrtnKq0z5dSkY0y0xnXkim8mTWBL99NEo0U5NZzJB4lCWQvlHJfKv5oPgk%2bYGIqMxUTxKFxLGCUSeU2G8YKE0tT5UQK%2bJNEnVQ%2bBMkFf9GigrjKDkx7Iy2oEXdLfpEIzpr3u0mPT7mgTrrbn%2bXD7FFVNvE5wMqF4YgG4345fyQhrHkOiVJNKyaqyOAakma8Yv5%2bAanJvv2e/YKdtGOGVzG4/R6QylcFbhDhvJuW6d1MvPxxJ5oP5ZbTP5WAFv%2b9mh6qLFo1zzKcwwr/9y7qGdpTCwRgaiB9Mhw/6hbayORXHaxV5vgZNZC6dnGT7%2bzyM8NihAlz7xST4IJCGMAEB/rsLGjotiWWL7cVd14I6LL365wn//7pmsTewa55TKmPVIgJbpM7b/2GisEFFyUdzYjtEOh5hlpQD6y5sT7Rs8D8q0tI1kdcNiTvA%2bMFU6zabGXC9zAaiTlTwPE5W0zDB/lsYGUkfAfF4SVJvOMnmJqrUG3OlXXTrw8xGCzrYw6lbiIdVN2/xNPV/J%2b1gTbguYpTvL4gwltePxiVYwjU/rCqvS0kUh4JHacQH1sc7fnPcpYKAv/Bz7QvKaRhSG3oJaGWgxI80smuSYwktMVl3ZP/N37FpngTXJL/4mpTETZ8fEtLQNpdhUdbnYktaUUJAoMhorl2GkUWyRfUwXqWxo5PcsoWasIG0ifXMoU5Of5qX0m2Wao9fSQou8viZwXxv%2btcRN2HozgfHfK1mMVRLoddfAfekIWJ8s2yjSGUI6DbG45FLlVXeOCpxcFDh6vY1XRj72pme46O7CvTmBSwWLmBVQ0uBKIabO1SexPDIJqgTuWYbx9WuY5Lnc18FeB8HRUsAqH1xWjgxwJ3P%2boFCbRj4OfE%2bAt7jtV3o%2bByz2ScKTvuy0wDbFk6wmnbqIfQMg%2bRnfddG/CNDZUDmNV7oK5p0S/XGE7jBHPPaRDFTTK2PDnFt3EqHTz3HqFEiSnoh4eG6RcYdicmpwMcfFQYnqtK/nTZky8d7uFMVxX//eHyCJZmhdBd79hyK5nrPEB/5phdcmCQZ7Ba4MOlgmpTisBXweKHAf7Pn1MLKkuMVB/D2Oiws64jys8PKrHqbvKrDfDfCW9we3X/nRT37kS%2bvA/QMf2N79bz/%2bHZ9uAXu2AJNOxArOhemZ5aJHn1nhsQAMB92OJxaNv/BSgfJega2nPexuabiNDylg5DjCqNcYQnP61GS/50iCqRRHMuEIgnUZgNQQmgqpdrEajVItfmMy%2bnd2QmHdVRJjAOsa%2bCMYPDMTBhkUnbpXnz0xcpfjWSGLOXVX1r/bhrUPY%2bCAu3UHsImpPK7tmGz0uedhNMoFuB%2b%2bWMHfBEaHEc7iMR6MgA896eHKs20ETobQa2FrswRD3/veQphHugdI0Q1m60kSzq6wF33MMANZPF1eLU/u5gTtulupIgXuPJ5dUOzGgve02SSygaJtU8O7mbIQNopNerNJYnYJ5nMbgq33qfagNvHOLMLrYN4y7gTytGfkRoCaek28UpDP6%2bfiSpZbQn5RubIWo%2bSKrJYURWFZcm11AhOZ14Uh1PAzIwoC3slUMlEmKpBmnrDkXEyb2eS28q4toV6DdgH/Gn60IXPZyJqEVV4D2SBKPR7brhBXDv7vn4/wf/31FMnEU9mMARfS0ZhsRtabbDsXX7LvL4XCjpMZl4Z/kkLxRsfkiTJ5lE41fDSBOl9/KtPEH7LsPN4tVrtrULtmE1u%2bNYf7NWrKTCSAn%2bHcSZad58LZ8fEUT77ex%2bxgie/4Hgd%2b5CMepji8G%2bCG6GtdxFdTdG62MboagxL4ZNBFKdaPE9HpDas20t4CYRSiT9aDACMv0epquDzreOgVnMyMXKb00AvoMKOVhwnexUGG7Dy9lo0WwkoA%2bB6ZuLGA91UPIyCVJEDRGJuxXQJBNa51xMt0IkynylKID1y03DFyGVOqnQ9FtrAqarbSw08RtgcYxxX6DB%2bQsRbPdActl3rmvlrpSSJSpQnJ0hs9BNUEkbDwE3S6Ay3uJjIcB4t4gk67L4m0nfYQi3iKdrt/SdOts5QdbZYXb1LQ60t%2b43mz8Iltl8bEZzf260ewvyICBkkSZztt6oRtxvmgbQC3TOhsiVJYaRtbk2MYD3nada7CD9opec2tFgG8SYRmdIBVbpfc1K%2bYePHPlmRkvbPC7BrJCJ9Lhde4QqfdQTdY4guvO/i5r7r4zJcqvPP5CPcOE6n6%2beAWd/urKyU2KX63Qu%2b9AV54oYV37CyxuRfgb/2qh//o%2bhJveywH82rOF0bz2iBCxsYFpSl74B1Z5fLQQ199%2bmtixzaN6Xt0jQnaQ4wXJQZSEdgAZKkaXWC89NEXK1EFjV2f/uxG7mK7RAPUc920ER1%2bvkUG0zDnbc9F0CrV3lDcU7jZpiWkdhB%2bT8abRMj1N%2bV55YhMbEjXGUnqNP3OUPtk26fzHG0TUqi3aqL/APrOKU6WQyHrCZQ5vm0FUIJQTeKUWLrcmB6OMQedYLhDPoXX2ZGiTKyqKiNKJvpTlc44Oscr0jQrIImYWLzjhO1eTk9RBCvAbrdsyp5fLhQlfctIg5qMu3XIsZukOklVJCsE0iz%2bpP272zHJuqaZZA1KmSi/sqWWfmLUb9yYWAXD%2bhi065CsOTFtbX2R3AiJ1GDb2Y%2bpbad/%2byJRRzyuWZNlC0U6V%2bAuBgK0ZAVGYxeHo1J08599sYWDxRkuevvwb09EJiOMu3RspX4t475KUM0xuX4NRcdBd2TcKTyAOvNr9Gg/UL91G8JLjMTl0NFzzx5QuuKidZXAH2DTHTDCqdBDvm9Ze57DNVXXC3PPlPEjl/JrrXHAjis4Rpi%2bEoNJJKx7UGk%2bwMOqxCDrYzuNUbKhSpY%2bSTAYB3DdAmetDrr/H21vAmtLdl2HrZrr1h3f/Kfu/5vsJkWJg0UlpJRIom0KoWDZSiyJgBVbSADZihMkFgIISJDAiAI5CGLDgWQYSGJbceJAUhJFhsQ4EAJHliVqsKRwJkU2ye7%2b3f2HN95355qrgrX3OffW%2b90EBAu5RPO/d1/dulWnzrDO2muvHS6QpeoWxV62iJc4qIaYLVoEJwvUZyMpvFRf0MPULMNHS6RfGwHHS3zgh4bYCyqJsk//SYPPf7nB6KTGnb0egr1KGPbjqESy7yuWMTmudMG7PtN1fXKk8oRLNFg8ovS3weM6R/k4wer9Nfb3Erzru/HwlZ96O%2bD%2b0dtH3/dnPvKJj7wTL9DOjWOTSRBk2wnYOWbE6SVUi0e%2bxoYl7Sc%2bFgTuX61xVra4HTq4M6Ho3tiqyQrh4Hi5wAWpDAc4mS1wOhxhvw9M18DRXP/GMLQmVhpEKOy2g%2bspy7wr4KAzDFltm5SqD2/H7PM5EljLTqkT1uLxBNeXZjK2g8WCN7MXUL0zWXcT2pJEkM7IErBOFoa%2b7kxuaJlc2%2bKIybKOg9m0Qkrf1HmDcObg6jzCPF3h8bzBRx%2b46N0dIA4yjD2G1gdA3KCXb%2bAHLgbWv1qIblvM11aSdTDADKtmjAHmWLss8CNTGlBoQQ%2bdy3TBJaNmHVTsvbHvURN%2btXZMZcYGhwMI826ZbinqsnX4UJ9mSXoKNalTwLH5WTZX9EWmXRnZM9tOXeR%2bU95qwoeuHE92g/M%2b9aH8fgJh%2bWjLjRxt9/SupJprrD9z32ifhwXtXaeYLgtv1SDsHwTi9tkxXMtJk%2be3k6edLKUNeS11jbT04TlaRVVAu%2bzAhyjqpSSpstQ5%2b2q/14qW8LVXG/ztn41RfobIsYGrSgsd9MYisnl3DdckgrYE6wR7BN9dJp7adAL9V33wGPk7f/%2baSmHklGxXgnWuk%2b8s4Txkb2ywBeoWqDzbIMZSsaW95jsLvOfJANdzoLyb42MfB/zYxxN69hdaVON5V1kbhtPWdzIB1ncrIB0NhKkncKf/7HCi/rUE6cEgwKhtxBKS4Cox7F/CSTpwEQ1a1NdrlMkIw5AOM7vEVGqBN84cYTmSeYiSJAXv7JcsgjTHMpuId/YyJ7O%2bgEvQTk2vAfB8hsKSSd67ok3RqxsveP59zXmOC6nIEiylYDrfdrxbNp/XQOCuf5D%2bkS1QuMqcR80cGcbiArJku4p38ApRPBbQHicjYaP5LUx%2bFTvKpKu717FLlp5gXn42gN5eijL4Wiu7C91tHzdrWWem2q6fN9579pduhIt9lWBtlLjw6jmui7EkHPI7MoLtZIw8ZWLvSDZREv63cyyljmaM2jawgJbFsngc3VIYydCtiFauJLC3BX8Ek8rj0ugAwWXdJELo8H/9MN%2b5e0hv55EujsYOHl2G%2bGdfDvDzLzd48YgbJAdn0xLnpxWyM8DtUSvM/k3vdAebl3O0gxDf%2bzEHL0xiHPRr/MZXKxwNe/hzf2KJSc8R4M6XXWvss5d2Sml3aguA6XVLJV9%2bpEMg8TgL4u39DQQo30w91iROBwmtWHkaA8xJbhC4B7RMtfOqAdwarTQe8Z1k3jhJ0OQLVMEIvXopBEkctXDCMcrNHF7PJKh6GhGi40zmjAVgq/zGw6C9QpMcCoCnpzvBu59eoooPdpr3XiAVSRvKacjgC7PChMcDGW%2bUs1B7TumNGHMYEk5GmTStbpstgBcJFsk6h/KWWq0gE7WiVMkM%2bU39DBdgf3OBir7ulCekl2j7ZOW1MJGhs3YDlvOHfJcpKmjay14LNyuUEW2lSWTGDeuuz4ZzkR5j%2bwGBOSMIfL7UnUsCPn3vzRaWSawkCukbz7awz59YpisZkr7T17w9ISDNCVJ60ntKuln7x630VeSdDngMgeAmVVkXFQlVtZPKSDqC5Bc5uFr6OL3a4PTSw/VDD/OzDaK%2bI2z77CELMWnxISL4/OopXOo2XF9NPeiMIhVU70gF1fU0hUAfOLgLH49RyOM8ltAJ8Ag17rVavTV0HZw5FQ6WEdYjrc7JNqW0%2bqjysDI6eH7OjhUxBTJsvH2auu61eK7RxU2Gg1xvg/XSRzoshAG3LkTJ0pc1jKdaM8mKataFklg8xiWYXzaI7zTI06G08XyuUbbty3HhHRjG/XiJ%2bnKIkpuxWwu87/0hwuc89BMHX/tshsVvOXjHu/pI8wbxQSURLa6dt6JS7penfZwHsoER/MEN671CklKJMd5oK4R0QHRccWbMDnKpuP0DH00%2b96lf%2btmP3UhO/egP/8rJt3776OgH//xHPvHhe3ghZ0tz4aBMZqiSmO2AM0DKAgdpN1ady1t86gsbXF%2bH8O85uDP2JVQuE5kJ/c9S489gngx3UWy4ZzCe3JDVrfcu53gcJDgxrLqw73ajbRZQAenmicte0QJrEz47X9Y4oXMNAf26EWkMXxoK2bHu3CjeSYBTgjoD%2bm2/2IbhzDl5jW8%2b5Y7bbDC40Bz6smubXjdYVzVOFw2iuYPpeYRZvsKTRYV/Zejj4F0Mz0QYuw0mSQGMRkjoDexTA%2bliOCBb4mmzFXMgGgP5Ek2kLgTbrR91Z8US4Pv5Coi1IiT1cNRmdtkescdkpURTNZGVG7s%2bzIPYE1cHfkaLp5iXcT3Yhns7xSYIvMlq8zP8e8/YkG07vHnu/D0jI26aihIWSnfsZ6z1Vlaprpa63si/qW2ViE/BimL6wGzIn8%2baG83t%2bO380GW8RBbDUuZWSmV0k9YbfjsZypaYTEkPvrfBpvR0MjRSKEkAKhTISwJwymdGtkUjQxyk09MaP/M/J7j%2bXerNGjh9nUzlZQG87Ta0TJSfyWa6CsCpSWdyKxNM%2bZGtPh0K2s379qabd5VwrUtMd4fZ/bnzPCVmUwAfPAowvQCa5zIk7/JwcivA/cMGTzP1b34xYEExFy8wsfs2dQaqry0rTpwQV5kwWKCtqV13MRyrBIaFxMJ%2biGFbSyE2MlEE8APZmNH72UdROeg1M5TJGMOgUmaRnyWrTlBjGBgJnSZT%2bDWdLyzcMzy0aLgXWGYjDJIGRa6sO9vT2u%2bRiXcDQ%2bWbXs2NIg%2byjkjWypTvbTXI2wHgoCjI3I%2blIE5EljRrbW0Xw/aYxpX0AWNDyWqPWwmIFoainj7kRt24bpB5o56fAN%2b%2bYlYZoj0iExX7ZDzV6YavpMdidi0WaSvg1%2bzTpYKsuGmRzSebZxk/UxmDbBzBAAAgAElEQVSawPjGHGv7npkzCSy5UNijeDzfsxFNiUS04440yDaOYTpl8OjEIOHrbi6Jec%2bOUJ4rbccgY68bhJ0piM2f6QWawCtAKaBchvOhas%2bEQOjF8EoWxlLHnkHE6qItfvXTwC%2bnIcrXc%2bwNXVxcV5heVBjvuZg/aREmDqqzSiJhqzeUYd4bh3jhuyu8OGDbJfjN0w1eOnDw8W9rMIo4bzVIK2e7Vii722lAM4/IOBVUBswzYCz2o6qN5z0K8cXnlADXEnXpSGjMnKoadvq2a28Q5ttIZJhLQ6Bnq0lbILnVtpspRMa22ZiTda%2bCIZJ2KWH6Jp6IPCnGtQAKsu70iB%2b515hXE7RNbSQkhDRMHFbGgZfDfCR1hiET30iRJiaI6qU6SBpaKhpW3kz0TBzlip/0PKl8ygQCdYZhzgqRpjFaMBtRYd6tiDzj33ZWkJTFKBFsM%2bRM55W6Kib3I6UOvIVXXqANCOCNZp8APz9HFRyjF2uuDNdX3TDoHfD/WSF2C9wJpGkLaRVC9hlZ%2b0dbYdlUKc%2blcI0eTymNUgFMntWIsH3tZJi75FJ5dNS993cRiS3j7rECei0s%2b3iobLvwoPyQOMnU8FxXgHuaOeq44lOaWKirTMD1SuVint/i8WWI%2bSrDxUWL114OsTpbozfyhG2fvRbAi7UKriBmL0B59VSKpMh7bKSyglfUuHzffRTTjVpC0ju9IXBX%2bQoZdF7lKdTGkXwVnWvTBaO4pYlI6rg/qBwB7eFZJqenr7vMdeeqmR%2bcZ3js1Lin5Za2uIQ%2bN09RSQV6qz%2b/DVckN2z9TTYQVtW7XqHeH6AfrHTDtohwlgQ4yjOZw6/iGFQD8/aW8QpMTo0NOPduk3Gnq8sa9ekQHt8/478rFKcDLJsVPvivA/6DAY5HFS5eKfHoV4Fgv8Htk0SIL7aEbATtPNiqmuMVV11tpBeLRJvzvOZEsEfPrhyMD2kTDswu89ceHP7qT/7u//Hxf2T70bZL/Wc/8%2bvv/fN/4SOf%2bLYjBe5ZqsUjbJlYfkAwqgHuaeSj3ugueBhyV9Hik59OsZjHWO7XeO9JKO%2bFF0ukB8ogHa5WuDJZGf3LOYrjEa4umEDK4kN6bk7617NCOsrBYSwAXvroMzp16bzWrtECdXM3qlFXp5czo0k3wxz%2bttfr589T4K5xkJH7M%2bcURt20Eu%2bRn7tomWyhErDiIsfiKMbxjHtGfTjsCOuxD2dJ%2bUuD80WF5ZsB3MzHdbnA5abGS06Cw/fXCKoEh4MMftTDnrfEgKEw6n9pf8VMdia%2bEZCbiZEN7QirzlGgi39LsN6ZFfisqOm2Ep/tprHL/uRckBTRUe9N8M4XqyjyZ1v5UM5vNgmqVfcwzysB/nxbGXjV9BKE80UW3tpKbnGPlSO5rYD3Z1%2bc6Aj47WLFI9SjeucTbxk99gmeQ5h90w9tEqoF3vY58zOyEWFy0/Yads3Fz8v5mPNg%2bgS3K2vxbOemzoHrbeTexFFCJkloSJKMMpNU1y7CUJNP6G7EDSw/S4nAV15x8Hs/V%2bPhZxJctTkcw2oYqtFMgngrO27sLwniBZCTmZcbsNDLSG5eDtC8p4T7ZWOxJCEVO6O/pZl1sTKMv6zAeYv7vQjl7QwvfqgPJ6rQP2px0ABPhRAxEobGg7e/wu3zEZa3Mtx3fLxcVLjfOlgPBojCuSzwtIm0wL2sG0SJhyG/hgsd5TGJy7xd5FK0xd8mqRLAU%2bcu%2bnbDapGNzNw5wmIs/YJ6ZpUCOMidKaJ6H71wjlVBtltBceIv4fh9ZSRFBmR38%2bxPrEysVKiyadojCKSZlMq%2bSlkNdfEyxbWMMrGvUV5DPbcuGZqYSQCu1o6WNw7E/m9X4t62vujmm5EcT%2badEovdpttB1JqNABPnWP2Venoz5sais9%2b52fCbaeNG/b38bKqE8nDLHVg2r9vHJCz/jH%2b8lXrwaoQxzhypD6H3YO/KjOBOGIqgm9Ki7hjjz0WxEDcfOyi7GyIT7OhECOgSpIyyLGqGWSbB8yz7LhIOn/4PS6ChDKpCRCsViUxkCONYWPu9uMDlPMDfeBl4/IeOVHnuRS6u5jVmixqbsxYhN889D81VgfSUodIWddri4NDDhx9E8A9qVGmLL6LBnz728ZEP5RJRTqsGlBnqusFCSEPpF6OeVoYliGd72orc3ZHHpuPfCNb5r0iGzMs%2bE8ugk6xY5oHZqOwcZIRNt2SJLbjEsSwVWdXr3UpkLGjfyhlFKqMWv1KYKaqxrtWJjAw3UYFjijzxeiSyJePHgZdfoYiO4GfnKANNGGX9BE1WPTB7vF12vcptaMN1iTY5EhbeoSadbjO9Aw1CGB9yNgGJDrLotu9KsnI7Fz/1bedgxHlzCZcFliQR1ZPrqaSwkjLs/DlIL7ByjjBxL7AAmX7bi82caUP1psgSNxI8b82NBqFmB5R3q6PKeDJadzs/8cyC9Xm9xtfeAnRbPMmmA9g%2bbp/5sxFdcSsyS6IA98FNxp04IyVJQLKyI5HpAnd1nCHhUCHL3ZvAfeNJoiOJJ8qsqIN/tPakzszFKsQrv99idbFBb%2bzKZnb2mm8Yd7OYhAHKc%2brbA13X2DXKGsneLVzGDRZtKRtahW5ab4DJn3alegp1m%2bGLSaSx8Q6SN0yb0zXmpHbxptG4CwZ0gFOvlkRTy5Z3xxUh/ClaqcwtJK4p3HQ3aJAsI6xGFCoDw7WPKZ0sKOsQmdka8dzHcr9Cf%2b5jM66QrwYYxytctMDRmYPpbVMfiPP99VBMKURaZsH7ATEXUJwNkHsrvOv9LLLYx73bNR5debj%2bhQ3cvgMn1Ipkl35kIkTGMrT1cHy7xfVTEqsmKduQHUVZvibW306LerN%2byBTaQfDaa1V79dUPvuvyf/rEP/i3z2w73ADuH/%2bRj3ziA5MdcO8SC2xMYugDTmaRj3ZTCVgp0ga9hDs7F7/96RVWswoXkx7edxxKRq1FwvowdXdE0J4djzE3unTu4PfGnKDZSR3MCNypiTcfsQ%2bHYIy7FUkoNSyoHGJYjyuTUGpZeUv4arEMXSgI1OkoYzvIBUNqnWqZPJ/8TrDODld7uOXXktQxvhNhfZbLDpfE9Rl3vx5wh4l1gmaBzThAu%2bAk3OJiWWL5KICz8TGv5zh7dYDBnQzf%2bhILaTgIQ1eKUu0nNeraQxCS3WWVshVCU0Z9s16jP%2bhjs9ogidVvXc3wuDjZHajlgLjISOrHTZcHMzmsixrjOABLn7MBLONu1e9SmKUw2kHTQxJTXp1/ox6ergZW%2b857VvBu2b8uiDdP3LQtIwk6f6oMR57tdsJ0MKFmmd7DxpXGJrXKZMiFOmeyadf2Ubsu2fZuWEsBu3b%2bYeRjU9QCzvt9rbZo9zlSbVHK1O%2bs3oTVLznQ1lv//5TaeGO5RYDOpFT2PV4XnQoI5BlZEh0jcz59SobUbeZTX3Dw25/s4wu/sQFoQEJwT/aty77btrN7Gjvrmf4kzWQ16vZzFtzL6mVji3o/lm01Q0faWRZjfqZo8CfuRlitgNUMqO9m6L/k4f0fYmVH4MgF3pScngYvhmTbgRc9D68NVhhHoVY%2bbYAHrYc3kw2OIlZQ1POT0aFUhjkat9MeTkc5JoyGWODec0UuEzueSG2KwEWSqFRqGBSiOZfL3CaqqiNP6s8RFGMk1IUbxm838VNOscCqGIpUa5ioF3pdpvDDHhZrF6M%2bGTb2Wev5ri1DFpsFmlTHruB9QAeGfCYAVpxpclMpVaQ0diuqoL8s54ijkRwzCVfI2xECzFGKOw0fC5n38dZNyWq0J1wghTXbRbXEUx5jYWmpJ%2bfnzNPc5vx0Fy5eCZMjrRyl23XEnanTz7ug3fYJ/ivJlUbSw/Hf3fjSTrOSa7CdUe9ZvkcF/KiKBQqH2tDdSzY8praDboBUkiAyN7GD1fNwvretaWUJvG4y0dR7WyKErd4LIiONIfPeIo57yDapFDUJwkBAKW1Ff/erffzdL7aIsgqjgYMgcDFbN3j4mRzx0IEbuWiuSqTnrtRb4B6MtQgOjjzcvUebuABH92v84udK/LXvCvGB95baxmmIvMyNnE7ddAx/hawaIeaG0XFkk2WjHc%2bSFraF7FBnUrTUpTCtIP2TlqYSXdBmlwRcw7bLW4bYetYCcmEIF/sZm5RqPyOAmDkqPGE0QVRfCVi3EVTKIqPySipuE5jzRU21sOiic9eNgQB5/wj9WFlqbr7ktQXFBsAJqK1FGmLnI7Ll/Z6n0heW4DZMO%2b0RSYbwJS5SjSfJoQt6xfd8uBkLPbEwFBM0VWrSZdxl1TN5bUy%2b1H6su/8%2bnYbs3v2Za%2bQGhVp7mjXY14rRjJiE0S7SS4kuryUKeF1vo4k3AN7iD64TaqSh65v41O/4lhuSMhkJnUqyc6N0tbI1XrLIXekWYyKnUnPEWEBaApGOM4M%2bi/hUYjjRZdwbd4QqX8nGU6qNLlqs6xBLAvd5hS/9QYj15Rr9sYPpKxH8hJVTKZXxkZ0/guMFwt6Lj7tlcLsJqtRJosV4FmI5yXECo%2bOmYwwqkc%2bQ1uTln7ktLks6lmmL22bhEzhinkPdir6ddpEE7eNZhPkkx3GjjP12IpW51cE5K6Ja9QXlJzVw1%2bczHyDurRAzEXVS4M20j1D08YzbudivUpHryVTWANmogtO6uGwbTMqB%2bLjPrzV/KSDjfjXQr5ZJiZIZBe5k4sveCsm9Fve%2beYD9SYU1Arz5jws8ngeg2lGkPjX5c8W9YrAwaOF5ir80esfNWfOaXE%2bZPhzEl6/x4LK5%2bur9566fLq5e%2bczdo4PzLmjvzuMg4/7RH/yTP/un7jQfWqWk6G3Koza0kTjpz0yYoLVNrlKRonAxGQOf/0qBi6c5Xh4m%2bNC%2bg7jnYyqC%2bFYm2v3VBtcUjZnzKbOpL82sVahtd5h2UFm2nY4w0jHNYLXOL1Igw5yLkTQ2BgE5E0nt3uGCiamGet2GktkJTPECmWRM/%2bC53nzaYnBLe5k4iVBTb5h9AjRuqKgDtjtR2Qi0en3LXgh/VeJyWWLxKECb%2bZiXc1y%2bPkAxXOF7vpU%2b99wp%2b5jQWz7IEYcEGWT0l6DgJuwlSNdaJttOgDLxy6ZCO55lBGw7vYVp3zag/qC6d9V525eAd27HbfPbudiGeCQBlDIatXgigF9kpejepV/WDmLaSFGPVehEavXvXNDIWMlGwjDRPI6/d%2b3LKI%2bITGVALvw8gMmfBPvUs3EAcLkkcOfGxW4UqK1nezNywA8xkiAWbA6BgifvS9jebMTktnluM6ELr2A2gDx2t4FLpA%2bty1xB%2bjYplUmxCtxXqYsw0MSjiGCFbHwALKel%2bNH6gxgD2u1NWzye%2b/h7/4uD4tOmkanaonupSba9gX52j8ZSGbqKd1xgusDA9g05xlQE3J7CHli1eB8B%2bwJYzlv4L%2bTwHgR490seXjhopMTyUym73OCdAfBVLqaOixddB1/NHbyTeRsnGR7Ax9fLSiagk8kQnr/YhpIJ3CeIxVVGfKhjTVBV4N6i7LnooxWpTNwLETUL8cNtBgMB8iOC9xvAXTfCnGRZVp2SEmEFzYaLIfvcmSGqJzJrJIHq3vsh7R1drAtazDYY9RtJZu2FK2HkWXreDwdGSjNAVa41jZRVL3OtemkUxtJZwmYOT1h3Exs3nUmqZ5qOyJnSb8k6M%2bHPrOZm%2bRZ4/swY5vUR5NOOcjfudg4j9J0neOd385hJ3GxBtgX%2bpivfANwCgtsdKN9uaDvgodu97Dkk6c/OKNJndrIZvXZHgTpGks/C37XwUPdeVW8u0uMttahslc5VOvlKZEM2RrsN/C7SohUtZcYQ8NqgJ4z7jhWVtcT063E/lPGf5TX%2b6u8lqN/IcWusbPvFvMbiusZm2iKioQD9xqcFsnMXDkEipSMZ8N33fFzEoci/lkvg6g0Hf%2bu/anDvoJR6GucLZQD1nhrk1QiRz1241Q5o29k5VaIkHWb92faWs5gE1La1rkjs3Dumkn%2b/oV3vyBP5NwJMyQ16G7edLXCXz7RoRCqzUP/2eIKoUuBebjhOmEBPEE/P%2bBZhPUXuESir5p3JoQLS5R2y8JcoggOVzZgEVcIyqzPvN1MssY9B7IiBBUE/899sP5NE0ySQv1npqc0vIinQiwOplsr6JHyJrt1lbpO/1bjb3mklruy6TGieuJdY4hhBdYrKJyNvtfL67W5%2biSo6gpedo/AOBbQ/azNKxpj6dLvB4pq3Tl0cjx3xzLdJq2/3TOW6DDYhCGcVdxtFtv2D0jDd/JopweAWPlMadHGO694fHWmolebmhjIa%2baiJ/Nq1i1KZwHXh%2bTzORoeNVMb4uHOuYgVVMu6nqxDreS71Hn7/11ukV2sM9z3ZzF4L4877MCFmx4cXeMjOHhvwzkW8RphXeOX%2bbZxUYoKLMwHnHVBhxjy1EpTNEHizF7Au/YWrxCCT%2bPvzEEujd2dfZHvd87SqKY8h0D6S5FSTjGpAOyU4dKzhMeI04wC3HA%2bbuYOLKJa5/oBQ3ahoaP%2bYZ33J96s92qSuJD8sywY43mTYjPQ%2bypwWRAT5DlbBGs3lUDaCIpl5OoJ3uFapzBGTVQco6Iz47UtEJ328%2bFwtUYvP/0MHr38JCA9ZS8dHcgtYnbcohgVu9Z3X6nT1sOc/FKBe1Vdffe7u8ml6%2bfjp8y/0P/%2bJf/BXtoz6N%2bpj9v0bjPuf%2b0sf%2bdkP7%2bFD64x%2byNr6Qd9HyXADAWziIyl10K1qZTrtCSLfxR98boPHvR4efbHAhz9AnbUtH26wlket4M0NATsymWsWPzpdGTbcuraYHRXB9cVGi%2bnY77MsvLChhoW/nSijznMSWD8mW%2b6y9pYOlu1CZuqXcNDzsw%2bf1hjeinD8tMLlXe42S4xuB1ifakIsr1g%2baywleb38HNl/OwHJek7NVBTCm%2bboxS4%2b/STHZBahSn0s6zkuXh%2bgnKzx0Rd6qJMC/X6EyK0woaY7ZCEaH167hO%2bqZZB648pUr4VYzCtLs%2b3SGvdjZOsN4n6CbK3v36Tbd12ADMLG2BvKxEjWob/7t8vW2k/Zhdf%2briyaWkMu8mqbuNoljruRjlVh7NQ6PVF6lug5OVxUFx2y4Ig4wXB3z8jLDp7yO8V7nqCdyX3Ga5p6d/YNsgGMIqjU52bEQJ6POGPsALxtIwndykaGUKEPlznuZoHm87X6dialSmKzVFJVmQwZHkZd0tz4rhrgvqhDBJuVJBRVbl8GviZHtvjs77n4tV9sMbuimJs7Auz0713q8tlRa5pCSDeRu3S0D0Idml1cA7zndgimQFHzKPinAIq1hmD95zN4D3w8vx/h%2beMUy4EvAOa2hBp1vBN0vzty8RVqqw/W2O8FYh826WmCMi%2bTREs8LpFnDg55jqZV5tww7pMrF6ejGrf7nmjcB6ZEe9Fz0JNk1RB%2bs1QNLcF5f4DUv8JBM8KAFqUrBT/iKEI9smHlyJSxL5Ado1Wd6UadxEayucrCb0oy34albxwM%2bwR8BKAK3OtS7R0J2Ev%2bzE13mOhmNF/KMQQeZbGCKwWVjKOK4yCGJqVaeCuMeTOWz4bWycZAVZGN2B2jYZvV%2blSvX1n6t7Lbu/Gn24gtwdHJzXm2m8hMYfYXOtftALidSSxooM%2b91l1wjae9Oiu85bXtlzcjW9qOiQHyrrST5BfIi1GPFQLTnnyHx3uBtqNl1MmWb73HRapBOd0QgQHGtDh8O%2bDO80dRKF7n1Il%2b4lMO/ofPtHjHgbp6RJGLL3wpRzVtEI0ceJTIXBbYnKkkgCiiolTsro/9YYTFdIMnjKZ9doAP/0CBv/7v1mJFSDlJylCUPMtdwpveo21bjXZ2dcw37R/f2qQqBWQkiHP6GqvcR8LIpTzAt7LtWzZdijjpf91qqd3PWf92G83sMdHVbuibBnV8gKCmxt1cV9vA62kSOO8yqqYoaHog00wr1UmrQLXmenktBvWVJKhKpVGZxIy/svQ9TU6xeU%2bDnqcudKaByKTbQkK2Fc1tS%2b9ruFGPdVP0rD7cXoPt2lbvzWqrrBK7q/uhq1FQXGFe7WPsT1FGeg9t3UjkersRt/cl0WNPyAs7CoRxF1cbTypAdxNVu0/12TXXMu5yf0xiZk7DQN31%2bO/W5vKtXUN7lmXbOzIZfoZSGvG2N0SUWkM6uJqpft0SmnyvrMqtjzuBexww8sWqqi4uZ/TOL/DyH/bwlWsftxaXmA2O4b82V0tI2aV6yK9YfMmFKzpQT9QQ3AFS435%2beA95mOOYGzpiONGWd16mH7NSaW0SGalLJ3Dnhr%2b/1GIK66EaLdhtK8E0X5S1SJ4FBXKUYxsrR24S%2bDpxXCwXGg2X2VSwYYMrL0EvUknxnMC8zDAY1bhwW%2bTZAEflBk%2bjBMd5Jiz8hZ%2bg31sgT0fwhQkHVv4a42qIdbBCOx1ssQj7piSp0iryeIHs4QjhrSVeeNFB%2bOIA436JVz6ZoT3v4%2bKqfK2pVw%2bj8JP/97tfKp4uLx49bYPg9G4yPNeVRwvGPcukf4Mu8Za3t9PyT/53f/De4YNv%2b%2bn/%2bGP4KIE7AV6e1lJZzQ4s7VQOClbwMp8UXa/rSrLRF75W4eKywpcuQrz7PS4kL5V0qnxwB7AFkxkQTj2wfIM5H//Z%2buYCuFqxDK0y2RZ426QvmzB7nQEc66etj7usOsqdWK0l7W95Brhbhprf%2bwRw7gEXtY87ZxUu7jAtgDujEsNbATbn5XYQGLwu5%2bQujddANp%2b7PBlgZhf8xlWNBwfaVotIGffPPckxEuDuYVkvcPVogHxvhe%2b67SFP6B7QR5JkYN7s4YDhRxb4caXymefYx7uTlJiAxA6cC5BqkdYDxJ453sS8twu1feQmOZPg00pH6IGcJOqFzH8J5FnFcrNmkZxOkps5h0ysBhio7t3FnD6zJpnV4pNueF7ahzaMTIwVuc1OSy8LeN2iH/C%2bdUHnAKT8ZUMtXeAhMlIcm2zLayCrxBf17VlFVv1mAZhu2F%2b6HoE7nas62foWtAubZvqnbSqNTDhmU6D%2b/PK8DXCnPIbAncw7E3/ItHNyDHwHq2tl6TN3iLwoRTrD80umf9biYspEOeDzj4DFrwR43OQAE1u5/llWvTtMOQGyYUpj81O3eN9zkdwPy6hLws27ctWsMnGUrciCMZ8PWfUdo2/JsJk6mHzAxd1bAfoHjQBvDf0RANgVXNtBJCu1g%2bBwheeuRng4XGMSs46DcYiSMe0hHuWSlHvCMG1dixf7GDHyYSp8yYiFFO%2by4E0jDpfDupXqqYlUfAwQNLQx1esXxn0/Qlk1ympRtmKqqUo9CWkPTsuavEYAzn5Ki9X9eIz0bXTv/MSQiavFCP1ghmW2h364Mu4xOwJgu1mV5jWJh5Js3Qio32Ycbnk49YmtiqVh6gfbsK/%2boO4nNgdD50llm60khoWH7BymSURbWvqGOMUCCMvSbbvF1vFp11FMMLHzhi32Q91%2bIwWpuntDmzeiczPDufbbngHv1NCaexcWrCQAT7ZjVaw5wyU8isjFNgSoi1R%2bX6wcjAe1RDxUssRmaFEVQzjeErU4qCipoxriVrzwtzKOpkZspTJm7onjGHmWYTwIcLFocbFy8VO/52FUVTjocyx6uJhVWMxrZNMWQeKguaiwuXCltgLHGD3baWN6746LuEqwnAHrlYPN3gL/%2bY84%2bNfeG2O2KrHOSzgO5YE9rPNM2i8K9lBU19JsZaNSmQVzFBJNPu3q2LvDePtzx4xBNuJSZKvH7BoJxfO9b%2bgUYxNEbcVYMu72cW3922tTK0nPxX7cD1qsm4H0y16zFBkRrYPtq96weuYEYXWN3GcS%2bLYUnxbKij24xSWaUN1d%2bF4c%2bkKmcM3ys0vUPbrPaPKwMOSmgunbtsE3enMradHo7g0uQ0IaOla2fdVRkofVUClLsbIbK9/ZyjsYeeDGvLhA6R%2baSLWsZsr%2bio2r2hJHkfqL27WW40Qkgh2HGbl8y051oi3ydmf4kCyZDIEFiQjFowpSSXwadv3ZppD10lg8WrxDgE7AziRn/su8Fd6rrOUFizbu8rD4%2bbQoUbsj1NlKnjXrnhRc/zzNM1tufFyvMrz%2b2MX16y4WZynisdG492x0icmpHpzAR0Efd8plzFTlViVm9%2b8hzTmzVzLs7bUOFoGw6PbZSRQVDW4jwGlTS5IqX8kiwHpciIugxSplNsBsDvjHKxxIATRgUw/hXa0R3N557jPBVMoLEEi62lengVTsw4NoI/r3PB1ogc/eGpsFNwkKymUV4VprKqZexD1ZX8LLFdqjBFdXwJGUyXEwv3YQ3l2iPdM5XnTuF2oewH5RpA5691c43nMQPOjj5LjCH37NQZi4OOrhYfjo6Zfaq1/%2b0ePjF/ALP/Nv/pHZ9D/KmNmOjfd%2b9KdP/pO/%2bdd%2b7i9%2bqwJ3Fp7J0hoRNWktEBYpqqiHXMr27oYUHyalB7cOgM%2b8XCFblfjUkwTvfjfA6chmbfNi%2bHBZqdQmpJz0gDOj2bILD9exiyWL4jhS/OhyXatcgcmhGcDPdENQ9GbvecC1S324g/XTHL1bEY6cCg%2bftgLE1%2bc5%2brepTy9x/5aDi8ZHdlGKFGbD0ruSma5ThYAsU/FXfiaLPgmRnxbiOMPrPCPL2gHtvLbHsxbPTTiROmKtGIfAmSSn%2bmgzAvcVLs96cF%2bp8KE/naLeD5FEfcRxhkkIxF4rO35KaKhztwVfNtUAPX8pIC3sJygon2GbVwQkC2yqERJ/IZPPmu%2bxNLxhku1MYQeGbIhMQmaXIRK4QVabtmztDsjLOTusPMG9TE47nCEymiWZd7Ld%2bY6tsBZlCjqMil705wTwvrjuCCvEKpQC3Pm7ouickhtzTaKhJ/CmS47ZfFldPcP2zA1g5dMbyamdyIzdDNxMQqUMRiM4XdBu%2b6D44Avrr32WMhhJUBWLSE6evF46y2hiKiNL1LSv6gjeZgXfb1EQuPMPJVC0LYK%2bB%2bYysYpsmrp443MtPv3QwezXfaxIiwAOVxEAACAASURBVJvQLjNurLWpqi5aembh/Xci0dKzqBnbp/ctGVq2kwECW/hHvTm/k/8tW8TvCRC3LZ574GN4UEuC6okLPCbG6oB2mZladfIIjlbITkdwqecrWawoFMcJC/HrykMyyoW9IfA/HHha1nyvwfAywHTMiqgtbg0DlHWNrHExbGpNSB2QEfVR1i5iKOsupcX3QtnkC3CRQihmYyJIUMddHswRlWNk/hwjOooY1G2lFewznJ4JJNfFCKV3jaCebHMqCNxXGSusLrHOCVyoyV4CvjFWZli2NB6w4szRwPOtv59h66O%2bsPVB2Dfsp2H3hDnfJahyjEhlYHE8sh7xNqG1o7c3fdVGoagF52trWylj%2bWZRMj4j1YybAUFHBFOd2FYv1vHd2RSwXaze3FQsvjFmZEO2ETmRObP096ZKsS6GGNHpqlxLhdIhbdV4fLGBG3JScLBcqRsWC2QN%2bzWWa8/87spnVcdNEENJYIWqZh2HHRHA9hrEKkXx3TnySiMe1Hl7TmpcToxuPg5ljD25cvD6eYOf%2bX8dPJhQauHi9LLCYOThtU8XIDb16BU%2bo0TGhxNrqL8qWzxIRij7GxnDD79ewBv68CIXf/vHI7xwtMFy7SOtciShCfMY1LXOuV7Qc76HtExNMMXqAG3L3Vx6n41adv/KIXhINxFxH6GYbI0k8MXtRRtZMaJIZEQXv2szts2CFbUj%2bqFr24QBk3DoMqZVfYVJl0iIymG4MZ9EKzjBUMdaOoefqDuP%2bLozYdmdClOto0kdZnjuYY/2t4RhHKMt9kfUwGtVUh4rya2sw2Aic28HQG6QKs86ynncBFxgjiMMjPuLnXQaru%2bbC9T9I3mG3M572RXahMmo6rqyXdPERYbSmGN1k4nUIlJoLiaB4gKz5hCDRD%2b3BY4kFQKu3Xrcdr5jUTYzRVAGM%2b7rfVpmnADdDkXRtVvwbsa2AHcTjKIcxq7D9vneaCejYmBhQEk8tcYbXIdSZf35r2Xb85LObhoN0%2btxkOUFam%2bEKjXAnW5sXGKMQUTe%2bFgtSjx8XOH1lwOklxv09hzMXvWliqo%2bIx/ZpdG5Uz/D3Ds7nVQVwqLEwwd34TUVjdOE1BT5yyLEepTDa3feS4NZiNmkMMy66dRbaN8iTYdIektU2QALw5bv83ws4nnmomLl6lucU8iYa/h1M1JrTVo7Ol6D66AnvfV%2buMFm5kvhQD4jSmY2Sx/LUS6JsulRiKtHO3/v29kGBO8mI8NQLBDQHtxaSSEmPlDPeLqL6uJoheaCMksHub/G8F6L598/wP27NV55XWsSnSTOw4M1vvSJvxn92bcbB3/c93bA/fv//sl//dM/%2bnPf9wAfpXctAbckaBKwszSk0WPlWS1AneYwdm5JqcEaenj4ZoHraYFfPIvwZ1/yEUsSUgvqy/nMjxOAOnUCcQHAm0aqQqmaaecEQ7BucyG4G%2bLO0lY8tViD4J1JpgRfywKYuT6qK6mKIpPT3QMtETzjw7rSZFfBJkZyug0rmR1ud3fPcz4xCV4SNDI7cquZEtCuSgc8mrW4t%2b/h6UxZgucmHs4WtWjWz2YVlk98tMK4r3B5GcN/o8S7v6NBPwrhHFRIghB7HhD5BeKY7gUV9gdkHh1s6r58h7DMnmavUMNNppsv1XPrpCpJo7JP5DGq1%2b5qZmRQE7QTl5g8gG7nsW3D9wjgtSKh0U2bA5%2bV0nyjBUkGlPE6Uu34rnVtlISsftJXFx2VBdlFSmc9sjnU7FnLSVupVv4qB2tCHSND8iw6usFuEiobjyojvtf1aydw3%2bZYmNDkMvcwiqmjpze7giUrk7EgnuDZbVZI6zF8rwH7PkF7UVHfXiAIyJ63qIRxL7DZaHIRifWqr6E9Ro9EypK2%2bNybIa5e9vHkqsD8NzzMBMTvXi9I4hGQfDAVQMsOwUOazBUQLk3hA8uX1WB88FwupeA/8GKN7O4Q77y9wWroi7%2b618%2bQz2IJP95gaMnWN44A9vR8hBc94NXRGi9cjfDqaIFJEkiI2T4jbpZ641wsII8SHyWZNtaOIgAfq6Ujx2lZNgLeY4J2MoI9D0nbyP30%2bwHyxkG/XqHqEwwzmVi9boWFp7yl54i7TFSPkbsrRKUWIGM/pOaUc8t6w0Q0vZvcnSGo9p6ZE1tZoBcbT0AGX0moodR1qatpW7UCMvl3utGs8oEBm7Jz0vPZxFhitCLFqhhglJQdcYld/rvMNcH%2bWqU5xrZQEqeNvR4jOTsWUZ/l9tMc0xZg7xzP5LP2OAv2mUjLFugC/GejSBYA2saxAErmCRN6XwgzbqRdRv5BADuIFljlI7Ha2zWGGdPmtgfhHGu6/BDk9HWTxz8t1ubiRa6k7DutO2XfLomTFozSs103NKwomglwp33rHJ5zgMBLpU/weg%2bGAS6va/yLV1384uMAQco5k6DLk7yi62mD9VULqbc1bZFdunDJvD9aA3cj1AXwfDKAN0nx2hv0W2swvD3Cn/nOFP/eD4Y4u1af6U2VoqpHGPdyTDch9mJqrmkrmwvFo21sdO/uwiKem/1PmHC6FMVY5bkWmaLzl3mOvCcCd7bFOlcwwgikjjXdFHLYE7Tb%2bdZGPXuBMQqwwD5J0NIe2E6RlCalCzThAH3MsGwm6GMJL2KCuD5LfYo66MRhxlz9rlKqK3r33DuQdXqT%2bUjiSsAtay/weMvjaeEmxdUKet%2b60FCxTLbZpLrt0LEc7mCdsXhOI3Ux7H3qJakLBxNnGZXhz3wW61SljnYk8aFoOiT7ih27mjdBML9zyFHGncCd8/NyUyGOfZE/8t7E%2btJENijbM48Cyw57vtoQJFfShmJ5aT6zYsIo2UTTwPy7dYwhIclq9Px2FqCyrxsRMFnLaJ%2bsGyXr377NYTM2kIwoULaptUR0vAmRWpSoyLgb4C4a90DXqIzFDUsPTe3hi49rvPr7LfLpCqu9I/ivzqXWgc4NZgGkJeSlYdwdCp1bOHWN4eQWvpzQHU838SIHdVoMFjR3ALJhgTPJk9QCSrcE8zU4bYH9fIAg1jlYZKz5AH0D2PnhNB1gv9jgNEngz9fYH1DCpC1Flxme/yKIJYLaX/pw3EYTQbnu8JyNi81QO%2bchq7cykZXjauHjKoxwXG5wGfWQ9BYizeP5hvECjx6NcHwIzIIFJtUIsykMeB9sORBiQK6T9TkZ/RbDxkP54lISVO/frvH1Vx0MlzmaMMC3HMef%2b%2bof/OzHfu0X/uja9ZuTxzf%2bbYuoPvz9f//kR//Kn/xbf/n73vkjDPllWSUV54TtXCvlJUCe8gCGeew6ZTrLcODhtTcrZOsC//S3K3zTd/aRUGtVa7KgHVjsFOfrBncGAc5E%2b7atKrvt6NIBLfNNNxuTlGpv49BUpBTJCsMcAfD0rEZg4jDxYYBJW2NK8/%2brAj4LGGjhLCO21/N3Abo9t3yvuU%2bZkDq7ZztBea6HJ7Nq2wT39jw8ujbJjcaNZjUIUZ5nmAvj7mPZLnF93YP/uMDdD3gY9gp4%2bwkGYYpR7GM/UDulXuhjMmB3p%2b62FRAe%2bFoi3ATaUFczBP5E2rWq5jpFenuoGMJlsQC3gc/f69l2arY6byvveVsd/DMMCCciJkJZKU0HpdwAGN3JRwaXWZTlmZu8gO4xNjmUx8XGx5l/52JBwK/LlUpsdLOgm8hlXksC6sJYWnLjYs9PRt1OBM9GE/hM7aTXHQpio8UEG1Osigy%2bLRFvnWTo3CG5DEYWQ3uttdhs6edY6dUzk%2bKqDuGv13AN414a4E59Yep6YizTPyUj5iIdNiKtoTaRIJ4geLZyUD108PhpBC8ETmcF7s4LfIWWUkx6/oKpPEUHl/cGEnpihOfdVYavhRHSuMHxc8BtJ8DwVgOnl6GcccU3k55MfpZHMi0hEhuC9jXysyECJuB07OeYWTQZGOAu6zsnfQe9SYayclHVDY4GgZRcJ6MuwJ2uJRcuVvdc0beHjakASRa6rwt%2b3QtwUK9kg0qSoEr6Atyp4VdGz0WcLLBZjUQ2w1fmLhGVQ2He/UIZd0pmyOayTsJeRGDfInWuEdd7yL1rhDWBvC7cg2CJ67pB0EzQC1ZYl/T3nWNNPXyt5n5k4Ff5EMN%2bJSyyDfMMBw2aIoUT9lHnlIL0TDTRACCRz6zgMfFVklxNbFyuXNucQMBOm/KOq/rymxp386wI9BnFKXb1Jrp9d8vEGvArSWs8tjMvb8dcZxrrnoPHkhm35BfHHKMRvH/d9ysVwME3CBZYlUNsAbokrStYt18pdrTOFL6wtbqS7sYiJVisaEkHLRc0HRFwZKw2Sz6LhBIizZfwvRl8V6Ml7I88W%2bAV6EWBOHH95GcbvLGIsfx6gYOxVvqk/e78skF21cCZOHjP2scXnpbwBh5wtka9mQDv3OCFYChzbX4KnEVzOFf7%2bPj3Z/hT3%2bvhnfspTme0mdT1gbpgz10iCZXuXpc0KVB5qH3RYYVymlVB3exul7WLTJq/56n2sZA%2b9WTtVcIh4002at6O6W0aVP4e/GomkiLOw3o%2bTfhVcsSAxW4UdIdV0fMrNFKYjB/URZikVq9ZaNvH%2b0icKS7TkVTLZsLmakPkd4ne3p5EO6QCrLG5lS0E9fUVK3vzeaqkja5BdsO9rUgKD31MxRUmyK5Q9w7gslATK7Ba2YLBBV1CSMgYYx7AqNvW65%2b5LWScTf0CHsO5eMXKs4lNk961B/XtTURpTyn5MNyUc5PEcy7X6jrDl0hOVP2mlWlD3QBa5yOp6GnyCrpjR67TeLSzgqxICVtl45mgbDGMJclo5WrJyKFUhdZ1TRct3rP5e8ek7Vm23ZJvIvnkxoXrT6E1D7jZkeNNXmmRl6i9IepsLXIZKpfo/Hy5ajHPmSBc4tVXKrzx5RDl9QKbgxO4BO6UbcrY1//zKJW5fIqGDjN8U4IrDfyyxNnR86jCVHTuy6XWyVmOc/iUJbGfpCPMogVuO%2bw5mp5e5qxIaAgoi/Ou1pjdajEuKedSgkjcZsoU52GCg3yDC/5bpFvgTtm8kL1RIrp1/n0nazR5X42DHr3ZdRZTVYX8QPeZIW5XG1xEPXlfMALlMaxL8nSEfXZTibrT5dBIoo9XGBYDXE85z0o2B5reGreaIervaPCuew0WWYA33qjwHHMOXogfXv3Srtrpjfn7j/lLB7j//Mn3fOwdP/FT//6HfoLAvciYdU3A3inkY5MmjLyFExs7tejcfQdX8wbZssQ/fMXH%2b%2b86GLDkbOiIl/qtgYeLlU7kluXhKnP/aoHXD4Zwjf7FgixhxCmPyZm46uAia3GLYEaSvRRRE1CRr7%2bmCwvB0YXGizmhcEgwQfWMLiBsJJqRNFpg6QkHlklM5UZEhpAtLGUG8aPLGu84CfHGZYnn9ly8OdslWYrkZ1Hh5CBCXSvTrh7wphIRYTeLzFxk4uO%2b9DO0yxazZQ9P/q8pvutHRyiXhVhmje72EEcZ9kJOxMoy0F2GcpmyXMDzJqhraipvcKTbiXi3gCjHxfsiC8wWiE2GvAzBrs67u%2bmSsHwtSaZvBwyshMaC7e4x1uHAzD3yvXzvcOxhyZLWlM9UNQoDqnkNsuBYb%2bmOUQclOVycYj5UWSBb%2bVwsbIdWbxV9vCkUZTdRImsyyafW8vEtbKPxqbdtNeAGT6y2VIal0pjdndnNDUH7HpN3C5OUuvVzZ%2bK1OtqIn3uujIYA981aQH7hDlAWFbgOxmmN0vdxuiQjryFHLhbrOZOKmPxjwpwmKrIoGlSZJ7r4tKjRrGM5JpxpbomoZ2hHZCZ523e9QYZqHsPlv4tIwKgSFc%2bAdVnBTScQpl1Be3SQqitK46BoWhwOAlzOC0yGCtwpb0nGhYwjSh1YJ%2bH16wLHBO4V/67AfTj1cLlPaUyDW/0QUV0JUBJGru%2bJdWRRezhM1uru0Vf/9Xq2wPgw1p9rVxJUmdDFasIUNXJc28eUB0uE5RCZM8c4HEtc9TpfYBJZwMyx6CDz6Pu%2bh8y7ln%2bFmfemCOp9kZotS9XAbwr1J6crDe0l6apFsE6vfl3EVJakFT3VM54lxT3xhyezTGZ6qRVcDT1HIE%2bXmt3u3/Yxywh0x/SO3bd/tRvYbzTHS36DkcxsuIE0rFv3aXOcLDeUp7ACqZ7JzrHLjdZ84IbG8xMsM62KPAhnIjXS9lgoOL%2bx4%2biocMxaXrhTlOv97SZr58yjSZ5S7TYfIvH7cDwCR276lHE32xpJdiyZrxNQPucahx5GH%2blPnSOOIuwnwP/5Bw7%2b11mA/U0pyX601WXy3he%2bmGO0B8yuWrwn9fF5gnaqk84yOJRYzse4c%2bQJ88iF/2wwB34nxoc%2bHuKH/q0SH7jvYroqUVUhUumYHnx3hSSKtjkJbAeWkw8pSaSMRPpEIzr1DbX9bF22lXHFEUCfp9tx2w/jnfe69OYV0IxQY42m7aMfZNv20B%2bM7l18qCkh3UNdXsP191CU16qH59z9DOkio75hPQVuMA1wZxG/YCSadcsoq%2b6SxZP2ETeXSGm/KMw55Uz8nOqn6/UMqXuAJOTmiRsM1cNQVsujaCVJ6ROBtsrcRGCw1XNzg604VZluvlhQiusyrUB5PYKpzHxukzDlPgxwphRHPmeipyld7TobKM51Y2eOKlIvd%2brxB7SXXNcYJKGo472cOveDrRVkV2IjxZNCdeyRDSNZcVNJ1o5BW92Uv0u71A4GjA7wSRrJDB1gKIkhIaMRgd14kYgKJVsOowUm8mnlMZmJRJhwleRhmYJLXYnMakM3PwXulriy8IPsu7UrXpUxmmKNtHSFYGop7cyAHAHKtMUbD1f44qcjLPZiHC2uMH29J%2b4y0qQi0XHx6a9F%2bLZvJrZ62qmgWiMsSzw9uI8q3sizPmR0YGWykRoH6TjHcB5hM8pFT05WnevZIlhh/1z90vfPgHZ/gAXB8plGU9nm%2b9SYT9eoufhS3iWNT/Dv4qhQkK5gXfXpbAR/usJ%2b4uA86OEgT6WbEfQT6T%2bI17gA730gy95RvsEVd5jMWblYoz6iixwHrFaq51o7D1aoL/tChIQnS5RnI0wmLa7nDvyjFSZ1XwB8sXER3lng%2bMDD/gcHAoDSuRYk6u/5D6//9//2xz77Gz/xT7/RHP4v%2b/4N4P5vfO87fuK//KsGuNOdQ9w29MVOwoHG4kDc7RLwcpDS9ojSAibhcfebL0r8o1ddfMDx0L/XCgu33/dwsa52bBA15YaK0UG5y0i2i8qV6LZ0NB89ynDxXE%2bTpBwHx49SXN2LET4Brm8TIOfiN9qVgPA8nM%2beMmmw0zoCss0GhP%2b%2bedXgviSV6u739esWD/YcPFnskibuHfh4dKXXL5/1PMwWEufGPsvrMYmWvzfAPgswNS5WPeroMylluwoyVLMWs3WMy/9nhm/6ngkmkxSDOEB/XKLtxdgPyLYXwq6M4wrDfk8Km8iu1x%2bjruZw/Ykw7L6/h4bsuquDl89IpCeMjJpNFQcTQa8FdRI54eJuV24zlywLLcikJcV3rPZ28e8sCFu8bxcmMvImYYqn5aRAeQ0nQJEhGhkSQTH/xgnBuuoRpFumxQJv2irSnYgvW%2bVUZAFkao2f/ID6eGPzaB%2brbEo4wVmM9Taso3XU6QZR%2bFWbjp69ez5eE2UyEn3h2layz6sMRkpLS4iy4ygTOSKV4WStspoWsyJBxhAs/cE9H%2bcLBe5iGTojYKeGWifIqUzGNuFZw1A8T7HWqnXMH5gUEWZxvguWbBdCTSDjRuRwE%2bNJCYR7GxTTnrp%2bEKV0X7WL8HiN/HSE8GipoP1Q/RYJqCirORj6ArbZK86vCxyOQpSlg95eKQnFTUVteoPjYShSGerqh3uaaCpSmRa4fVaiuB9L1VRaQ5JpJ3DPKxcHMZl9gnEtyDM8iBQEiUc0cxdc9JIF1uuRAPi2cpEHC2HcbRCMt0RHG/a562yJvUj/Nivm2AvHyNwZQpHOKATe1d3TWU36lkk0GiU15hvVZYr0zDBy7ErL1MMgIrvMxYVAgxaT/lbDTRZZIkJG371LHej2NqvBvenAUpUbhGTxy90mYL72JKlTNwq6WXgr%2bLfgsJPMT1ApGnLlt%2bQunVZZdSmpbgofOS1Waw%2bOp1EIFrJi65S%2bbnI0SfdmVJV9PuxPETb7yN1rxA0jGlOErGhLyVJKNlPbeZrPsR%2bNdt73xiGLzC/HskhmFgGSfg16HyiIFH8pxMFA8iJ6lIu0drNBpxEzDtMaf/1LLtoLH4cJx48rDOr1qsZqXov9qkdZ6qxGsXDRvtaDf2sq11hdT3DnyMfj3hL3FiM88udwLvfxH/zYAt/2/gAnYwdPp1xjVI416dUyH5e1biajIMUijbTKobuSSI99NP2oh3WRb501hDVkYmio0gH%2bjS8y92oZup1tgIYOGtT8K7u0zHsYRNxEm2dsIp8254jER5d13%2bZ8GUaeuVDZciPtHyWJMOysVsoLoTXkshkiaZaoe/uI25n2L44DRolaFn%2bZqde7cZkpg32RplSbqSSx9syCSl92zk2ygeyZ%2baLZObawYrJ6qbsiobGVWC1wt8CURwhzT3mqHK4ePpoVoXMXx5TV0FtWXqyhTSKnXIck0qpamU42BO27ZFEPbn4loF5PaRaozpNg%2b6qffDeCsJPNdKdQOz703nV4Eqzz%2brvAnQWU7IuSPlmPCdozjdhue4HZsNjf%2bScSR9a5j/duNyx2g0PbbkuCWo07q6cyElGWdJVxEUeu5EaJmQHHaUaOwxPi5fWnNd74uosvX/q4vbnE7M0emNIjVb6JLTwP1eUjhCcPkF1QLhNsnWUI3B%2bf3Je6CcukwBENKFZq6OCwns2kwmjqy79ZOtB1brZCeziAKxVXmWPW4hx9HDQb1JME7oybWKDZ74tM5QAE74lihukGI5K/lG2b%2bSm43tzIbStYPlrk2WpkcJxtcB4kEkVMU5X6xb0lkpmPqyiW/Ba7DhC4u7WHRbjApNb6FEzm5XXQ/EIEhJIIK/So9kuHUQUf0fML3NpzMfnAEAO/xNOnruDR/sh/WP/OL/8Xv/m//cC24unNhfhf/re3Be5XCz7iBpuNEWiYoyxItABDgI1xfCGbuVo1SJclfv4NHx9wHCS3NewpN/3Yh39Xq7Ey0WTw%2blM8PLmNk6jehge3oL10cPtxiovn1E9bXtSxPQbc54hpVL82bX1h1bPLQpJZu3OhTWal1JoDXK7dHMLO/uZVjXcch3h8rRo1O0VQo87Xk5l6gFvWy2qcuTvgNU0XuZQJ37JinHPrBvvDEFPfV3/hiwxnr1Z4QlvKphHgPv1nM4w/HuL5NADutTihT2jsYC92JeO655NtCuR%2beqGLup5jnY8FOOgCvh3qW6aZ71gWe6vvNtpuylzsfVuduP1d9PAUHxtrRrkXCQ8rA78rEHITNqwkGdUXSQwB%2bLMvSZ7zPSzKGsNAWfcs1WvkS6Q3nZLfNkrAc1nQb/XoMrAsA/HMF/FeCdpEu3%2bjAurNA%2bXj4g2vURPLTvBe6R7T3cyIfMBYblkGU2QIlQO3WiOthgg81dUzwsBJUiqqRi6W17k60bjcdDaYFX1km1LACRn3czLunpan5kS2mCljH7oeztaFRo1mMfoHOdJ5aGwxOwBqW81Xqw52yD2UU30QwdEGxVUi9xudLFGYLPhti/DmBSw7iI5WyC8GiI7oaAFkZyMp98y/FZSOsCQ8ZTIMX1Yuor0ch9M%2bzoYbkcscJgEezcm4ewLcWUBlOK63Gnc/8TFu2xvAPe772AtWKJgIa5xwioMK3hkX/gbjAxZ1MjaRijsR9VdoWEWPP1d9AfASUStGyN05JvRP394gQaT%2bksS2VNmu4irZ8k01lgqslNH0whlWufqpC4MlgIsVShvM16qjVQCs0F/6Iy0nCXhFUqNJm2Tayc5zfhv0d/7l9rJ4DmrIBzHlNGTllQVlX6HuW91X1IWF3yN684F60FPLSWa/61jRPS/7P8G%2bToFdUGguHK1o9nku/U4T%2bTRRPEqKNBphrBa2ralhc533ScwocSNMqZmKKCmw3vr2muh9nbBQT2cY8nZZIGu2VIeZ2Q3g3qAo%2b1rcxziTUL9tHYYijxr2EKusxWdeL/HffzGBt6rw0n2CC0eu5w%2b/kqOaNfBHDl5a%2b/jieQl/AjQPWQ2N1hYOcD/F3flA5pNHyVzWk3ffGePH/qMSzx9y40yNfC3tqBIeD5O4EMY88vdFZ097SCbQTmJN0uSLjjPSroo65T22CxNbRRMsbUjL2rQD3Ltz%2bRpNw02nsu6UTy4I3sMUpbsHt7hGrz/BajVDT2QfJg9E9PA7nTuvOC2HiLyF2AdvVmtE/UTHk5BApiJ1MxIAX7Uu4p6jhemYCDziNSi9bX3aZY7MfPSTFuWagH6CxupHKBkyt8GxPHCvUYUHsrHf7mgIorMahyS0NldS2XTQU4chC0C3SZeGXSa9NMYF5q6xoaQtqFg47jqUfJZzOuVhnouU7ABzo2JPNORsC5IZu48YGtlwt9S0q8RFz2nXRPYNVmqmZHWxZuEojfzYNrdXoJEB9as/2fcxW7cik2Ei6lbi4rlYb8j26yZUOgxJoEwBNDcr/djHijp2Q3Jx88IXHWTYQBo93726uSm2lgLvjGsb7ZLpzpZRJkONe77CpnIlcs21pXFUzkONe1E4eP1pg9e%2b7MJtKsyfrrDYO1FLyK3PtYf88hGS2y8go87d9Q3h2iIsc3xpdB8nboVNXODQdbBYGuBOCUsY4yTPcBXGMp5CemJaMOcCl%2bjD59Mh2dmsBbgrk8L1s8W1pGpQC9xivMd/HBzmBZaDEmnRx3GR4ZwyF7OYe9MVqkmC4yzFmd9Dr7dEfx7gikCfm1EHOM5TnEcKQtQCktnrLW5lKU4lQVU784JmHxcjHBzWmE1dhLeXKM5GODioMaP4geswi0bx8goH/cZF/tISD947wOGkEuDOPjlKMnz9H3/9P334Ox/8b24%2bxT/%2bb9vZ46M//PMnzd69f%2bfX/u53p2B34QAAIABJREFU/odXi/a5NGMrqm7KtrfohC0TaXytmXynFSNdYdzXqwq/9M8rHLw3xN2Ji8R8%2bIpJWQ1wIJXxNEmPDjOMf%2b8bGS4fwtTqNMXpxaQrs0HJQHIVfwpMb3m4c17hDY/m%2b8ZjfTdnyvUSBNNvnbouBWAuHs1qPHegevQH%2bz4eTXeFIGSy7WgFLVC3ExPvezZXsMTX0UGM6%2bvixo5P/mC0V0zE5sZm8yjE17Icx3WDBRn335jh9ruHKN9V4kESSPGDCXI0fWoPfcRBieNRI8U/SgIbY3%2b1LiboR6pnt7EAy1SLfMLcgK0Iyl%2b7SZpW/kEJijSn6TvfgMuztyLAScJ73CFZaYbtd6ZQyLPd0E6GNsnVAvbucQTvFvQL8Nbolrwn8iu7IJiJVXToJmG4e4/2nN0KqPYeZeibTQnvmZn6BNZMDvMYTXqbirk2GdWCdmqM2VZ2s7reuPADdaR5O8ZdmHh3jIk7xTQbIKNbUFqjCDysWIxiXbGCtDLuPnXuzPmoEbmu6OY3M8pilIlnu1zMChxNQplSrjeaxC0JvtKnG2QXBNsM27PRWuQXfURHSxTTgVWUIThaorwYSsgvPx0iPGBMVxs4P%2b8jOmQ%2bBc%2b8K37DDfe%2bsO4sxkYgSo2oATTUn48zHDH8LGXVW5HK9PeA3qs1ZvfU8/2lZYWLowh9atypb6xoM%2bqhyD3s9cm40zZAQcjwkIy7Fn7bBDPE6QThYIFsyQIxDqK%2beq2TSw6ZuMhNSm%2bGfE3P6RaFN0NYj9FLmLCq7JINrSvA0h4vm%2b58iYNotJWOSKg/XCAthii8K4T1gXwPXwOpzDp%2bi7Z7Vej3MrK03dx7ytSyYJR1UZG1yeJhM3/OCV4TTeBkMiyBfFuujEMLmXs6tDTbf2UxsZaKnUGkGwpl1AmsBzH1%2bmNMkhLzjVS6kMJUnjfAItUvtxp19q3cnSJq9rdzgf3dgn%2bOj3mxQNiMURpHHy7%2bO%2bvI7Vq72y9wmjBJis8Cd7ZTIpKcDYYEgvT0DxoBevR8p1SGL/YdMu6M6JAQujUBXjslWRLg77zhYLwuMe4z6uVINcjlpsaM9o9XLYKRi2ZWI2Ou6NUSbXUg44KJ3M59ZnWL6yLaf%2b7De6mPn/jxFP/qN%2bkGZbq0bDvdhnxTYXqX52CVy6E7R9lS/sOE0xShN0Hk58Kq2zlFLR5bA%2bp3D42fWeYZktCWP9YE6YaseztEP0xvMO5sEiZiW728nZilZIwxJRBLXkZNd3%2bUTW4vSXQDUixEIqOAXBcKHttj5ePNVDT7a2eoLj7tHLW/j16kSfIE7QpqGVGhJZ9atrISKkErCywRnJLJUCtI3d662TmqgIWQAK%2b8RDA4NOOglQRTqckgVSNNpHSLRIxvtF4m/PzC%2bMjfZMjtGsN5MMuZxOyI21cvUrDN8WcjG3bjLac0DJ2gG6kdoM%2bGmwdOgXKsAe%2bSfMs5h7kZTCS1Hdocxw3J1nKSbD1rS5gdCXMDbFEifiXZfwXiipc4b/R6vrShYCx7TlqK0q/dEG4dJdD2GG722Yaybua6eRIC1fOQZjkqsDgeKwOrqwyT4AncqX6gtCllNdLcw5PLDU6vPExfBdbna2z2qHOfweV9yHSplpD55RO4lDNQ1mmE%2bmHdICpLXD64h1lVosd8INrLmPVpuqhxOFISdLaqTSRanEO2JIhwSKM%2b3PkazbgngeEFPdTrPqZLBydY46xJMJlQOrMRJp7PYK/KJDmVHu2XQYz9MsOpOIM1oBW7jgPtUEm8wCod4UFvhYdZH%2b/orfFq2sftPJViTVxr9ao9BJdrtIes5wJcz2scHgBTpg06HvbG%2bp6su3TMOVmiPh1KdDrvr3BSD/D8txdI7vuYb5gPAARN%2bv8/cP/%2bv/wrJ5/90vXHfv9Xf/hvtLX/nDBCzDQ3ukmW0ZYdpbEzYsdIN6rzZShGEiDyBqtVhd/7XInXjxN8O6usH7aoHgO4o81JPmn/cYrp3T48o6fY7qTZeZ%2b48O456u952qK57cL7%2bgXadx3BedrCv9dIVVPprNQYm45ip0arXT/lLpO6YA94zGqRjuo59ZEqAJL/rLR7S53bMylLQknP1SzH0STCeeIjPmMDaKewIMrMMYa/As6dCLeQY55E2HyhQepmmHs%2bqkc%2bpp%2bc4fY3DxAlPib7Gwyfd5FErEQYIvEqBI6H48kK456LqlJ9oxQIYni7mMCr56bghbqliARld8k3rDJ3BSn0gK5cxH5EJhWxctSJ8UaI3JAEavloKqeyaNKNUG%2bHWzETW3fBthuKziXK3NYF37Y4Et8ncGfrXi5qcVeQpCwCTCO1kbZ%2bllS0OQYy52uRqS6fZQ%2bXcKLpL2nRTcLZFbUQz3apxmokL0Z3KW0j/rtaMZULjoRqybinpmrqtvgSpTFD5GmFzGsQpA1Kz8XKcaWYmTjP0AmGjHvAXFWVkvFnTiTpLBRwf7EscDImaHcwXRY4noS4XFbw/QbF6QjxLWXRTHwZ5WVPJDCcuvKrAcLjBYpzBepk1nlcdGhY9oONYduXWrXxWTWNaNLJgEJYd3q/J/s55pc99MeZSFxKauibVhxjbiWBWGUOx40y7hXgD3xJTuXfn5XK7MWssOpuPdwzZ4HNkxBjAnjpirtNRNxfbz3f/YqVTRW0l%2bsJgv41ynQiszUje4VLzbsmqbIP2IQ222eoARUQEjNhWKU0Nxjnbkc1P3fWa/OOOlT1DVs/YlUppxFJje2ftG9lvyOAICvPDxBY8EIJyu0mmEz5hDaKAr61p/Lax339eUGNvYTfyb5TGmd7s3WRUhBGGQzPQSnXzUJKhNnaFrb0dne%2b4Lcx5C7AQpw7CNbnCBrKZ3YbaP5s7Thbuc1Oh5HnpSSDAKJvCNwbASyDvhZdi1jboOyjIjstiZo64UjSlyTdejges9pvjb/zKvDKVYz%2bssLd5zyUS0YlWlytKiyuG6RXLeKJh3ZWIZ0BzaMYbo%2bJlYwccYPU4IWTGK88zgCyeUGGv/AX%2b/hLH1ePa8tsWuZVIyyUuOi8yOTGUApDqfWiSl52kxFnHPqhiKTUyGLs0OR7CrIJ2lMMuEmRizD5D7REFTY8385t7K9q0ega4E5wOkFZzUQqSSMCSmt4jFoGMwnPPBfjB88/8ntjvxFLSEn%2bb%2bZo4wO02RSI9uV5CatOBhpaCbk3oj2kVhYVeWO6gJtMpKBPzzg/9ZlrlNXCcJN6zNdXiAYHWK5LYbIpg6P2WxlkVr3WKL6OSVecoLhR4/kFvNsJm7aPxQUW1R4GfcuIM0LUKFg1M7t83hR6YiTGjDwF7RIdIqOuz8P%2bnQCc1yvsuanCbOc929fJhPNF4uKA/YlzoA7KLWNuN2fibMPzy8bFypoaDHtsG96r0mLMZaOsSJLHzamoWSeGtUy7GfjbCAFxjKQf2Pwws25xs8BIvxBxNucwV10771lIVK6DXF/WHlhzRDY3dP0qNNma170wXu5fp33hK8B1P0I9DxC8MYNj2VbZTXjIp0%2bQ3HkB2ekTuLSFhIt%2b4%2bG3/PLXh9Hxg%2bGwekFMYYwkk5GA62WFvaFuJrkmz9IGzDIgULezhfw7X6HdozRGvYAEmB82uJy5OMYGpYQeIHpy7iNEnsYCTFjj3OmLnPOw2WDAytyjBg/XLKi0Qn/u4ZIGAgAexBs8zBIjllS5q0TIhALdlbm0SMbmDVxeAceHLq4uaUdJzTuLMZmssVo1QbK2hR56foPqO4BvvstogQfH98Uu9fN/7/X/8dXfffCjb7Os/LHe2uKbH/7xf3Hym5965WOf%2bic/JMBdZicOFrsjNp1k28EJ2kWfy4I57CyelJ4meP/kpws8ud3DPbeGPw6w71RoHgPNPaB9BFT3AN6/R%2bnLXXoqmr89BXDXg//VM1y9eAfpRY6EFU3ParzmqIsLH66tYmmv5fGG9l7AEwNi%2bT6PYWc%2bXbQC3qnXuv30FZzeeSdcw%2bywX05nFY72WFZbi69cGJDOVqUcRgYQB0rLnbI%2bcNVSO3jixXiu3eCxl%2bBuneGxF%2bNeleHUieC7LYJ1geXjAF9dF7jV1lisepj91hR33jfB5b0U3%2bK66DMbZlRgPOwhCVi%2bmEm1LQ5H1DarBWSWMtlhIGXV%2bc2tCPr0uXNh2pUs11lhuwfZzoZ2Eapkx2zmGHExoCxGF/WbmlbbMWS%2b6q7RhuXhlyzo8hIrqB9FJrPedsdngGD3bQvQybLLAmm%2brPt%2bygJMkQfq3vmy4P4m6DBntYCcoctSJ4AuU9FdQHUxNiyF7dPUJ3fqCdgJkUmp4vVuvlSiMEZeIxVTDSu%2bBe5ViHCzQhqMkKWlLJhUFQSbBhmZD%2bpE1yzKxFAasJorcGdY7ZLAXTT0DbJ5JJOLzJu0NF2VcFgkx1b/laSk/4%2b2dw2WLT3Lw55167VW3/d9n/ucGc1IQhpZCCML34QAgY25lF35ERxLYMBJKhVXcOwQSCpVlJPYTtlJBCFUQDKFweBQSQpDLBlhbAEJBiRZQhpdRjNz7vucs6/du%2b%2b97snzvt/XvfaZI0LKYqlGe5/e3avX%2btZ3eb7nfd7ntU/Zsu5jeY63iiaun2sCTXKqiZrCqJtDGXlKY3RREcArkZ2LBxcV6tzpbCPAnU4wdJPpUSypQJ/ga7dDT/ZKEv44cVpWngmoL8yUca8D9ycZd%2bEHWLxJNO4VFu4IjWUPjdYEy0kXUWuM5UwrO4btKfyUVVbHCPMuEvOTXS1sDZBN%2bzIsGOrmjZFF07uknIC2kHUZjd5zvW%2bnK802kIp8ZMvouPW8mTdAVGwiEXbfutVou1lQYuporl6JfWYg63PQ6GWF8UzBgwB4m2uyUFDeo5yEfy/VzpavCeRhG7UqTGXjoZ8im05femrsV%2behNZz9h36redZA4g8Ql5uSA0AWvUkdv%2blGbKtV2NmAozQYoZH1DJNm7A8J4L0RgqJe7dVF6o3QSKmLJjha57LYbQY3gc2gielyhpgg0pui6VcC3IuqQGxyZWx%2bAEFpw8vQ9gP8w9sZfudOC51phv1rnmxqjw4KDGYFRoMCyQCINhxUwxzzQQCHZttVX/ydiYjdN6TIX24ALyxRfsZH/0YLs6rEB344x3N7wNnIAnRl2mnLyDnVjBA0CZDlRlR7TTAv7DQrbZZcZ1Qqo83O6s1LtMNIXGbaYROzZAFq4OUcFfXsBCM19qGcokAHzQZtRlVD2GoskbqbcHNWOSV413upT6taqIl%2bIkLvCOqxdT1sMScC%2b9DPUPksIqObmCammIJ9skIrDFAuBnCbm3JFoiUPcoyXdFiibSFzZ5T0isozOGFfATcLH1Hf2%2bCzE9HDBV251eArPLJzjbKtPGen1KJNFzzYWZ3TjBMFxJlISTi2uG7RxcXOxbo5tJrx9dyln1OLWNl4SGRU25o%2b/0x8tsmudemZ1JKIfZyNjT94g/JHLRBXb3QSmauNgtwW5xUy5zoGRZ5nvpe4QQ99PpJMWzPD4MtyPrMOMo/DEgxWx79aewxwJ9vOpFYL3IlzrB2kmEG7arSQ5AlmM7qfMdKsxBLnaG7S%2bTCTwsd0muG1exnuftrFqNsAZgGCe2M4Lbvg8doV%2baeDQ8FQnAUi%2bPjthv%2bxm8Fv3jkb/dmbm1d67wkmlBpoFInXMe5m6IwCje5TymeAu0RN%2by14o5nMbSdOC5cFhFMWXcEXlQVzSrXfsP03uxUG4rbqYB8zHIIg3OylCkcMEXqLhdG/Q%2bQyTFK1OIcSmdMwkrbeM7KY/eUSxxHfoyRu/RiN1hEQPjefTmvHbfiNddSH5NRmHzg%2bA3qhK2SEszXH9ju6KFPV2U/8AHt3B5/51f9x6%2b1PfMW/9T/rxCR6z/937/2NX/9P/vFWHOwyo5w6PQHB1PPObLzX2EKScSfr6LPYS4U8ryS7n7r4T7%2ba496jCldfDJEllWhG2ZlZZ%2btm6WlaSFXibN/H8jBDaz/A%2bCjDM5cd4MDD4IqH5FDDjvJWA8wsIJOCR0uCdRePRKO8ZqHINnEXxV1nw3NxaLTqTChlD5JyEoYG5uQ8FHCuyQyS1mIGlkwgls23VpjUvjsRLpdLHPkR/JO5gOgLjWikMs52A41ZivGDBibeHNkEmE4jnLLs9q0hWt8W4vrCx96Oi6mXYYcLT0YnlhY22xnaYQbHi1Hxg5xQvY46wyz5t2QFzmec6OUCbBWIFlrhAuIXbS7MXp8C9BbgzleJQhwMdZDO3yeph25YgL7mtC5bLTE1NkykM2aQ0qvd1lfk60/T4tqeKgOuBFjXhNo7O7fxNS5EVj5jpTNc0Dmy6hr2J3s9zzlPtMLu0zYhkgSVEgVZ26c1WzE22viVbEZX3xozv3Z8qUTj3hWNO4G7JpaqzIeWkLOsAX/BJMMKp4smIr/AnAWNOH4SFgrzcDjJ1AaSyd0GuFP3fjrl68qkEHBwkzgfhbpJdRwMKLF5wvhHJ/V1tZPspIUGQTnB1VntdwPWRRbDpFQmo%2b5MLmjabZta6z0F9JqzwWIr1LDHGykq0cfru7nYZWUpWncuCu1%2bida9CqOrjjAh1LiTcW%2bSvSuBVFxlntC42wIznG9KF92thviq8/NMJFrOekijIRrLDQStMfyUSY9Qpn2mnu38nZIZkXCQ/QsmCNIOQnmdnzuHT6ApYIOLujKoKRn3Usu7Sx83OFafP33hhwjzTWGEyaqP6fRj%2bjwTM0MB8ZTWMEFzfZDBpx2lACFVA6LHhMyZeb6G%2b7FMuIwj6oUlqUr1tP1WidPlSKQsBGa9JnNk/JX7EduAcpvhxEWPbPxM3RBebwfpIjOSGHuF7ItkMFeJdUaysE4T4g51vTHUz7nIvBGSSU/1tzU0I3iULWO8/gX80XZvTjCk7xS2kzp9Si2kb5GF1eRiMu38Xdw8CLAa2s5kt16%2bG%2bFHbzt4plui3WCOioN8XuHV%2bxnG4xzZGRD1CdoLzIcBnMkMLpNz5xtg3LxKXHgvELj7yrh/eo6tb4jxJ6/m%2bGvv12JlZFmTXAmMJw9ee9M6XaUlOlGAear69mbAAmNPAvd1BMxOwDzvlCy8kB58wjEmyVxAvR5W407AzjoCEcIogpOpnS/bk3IZ1%2bmLFbBtfTrMULYjVoSrrYOeUVZBSfYuEVEyw38kY5RimaqPr4URJugJOHaWA0yrLlrVCFW8hek8QRyFiDBA6myKn3izGiHsMrpVYLb0MV8yEu2JBC5i1HZeGMB8MYztsepquI3pIkM7JhA3CZ%2bFSSOUSduTyqZluCP5Ox0Bw5S96OrOscFrWAF3SSSlJ3ohHurSQ43LDU%2b3AtBiL8kxz/bQ6JTo2A0hRE062W/2PV4bK75yDPHfMYG7Zdp1CKw2AvY6%2bGdGH6iZb9Ei0yyWei1aRInjmffBc/PfdVJJIjSGcLRWmrrZuEg%2bWSnNfElLVV80/VwPCNotiOclCpGa5ijcNorlQgr%2biR3xQmqcrpKaF3kDk1GGV25nWMxYuGWJL5520TwYwW056otu2Dyv4SM9fgzZMTOJGj4%2b3uh8bK/8yY/65VteKHa%2b8XtD5hWUOcZMSh02BLvxFJNeit4swGiRw9lsIxhogUhZ11DhCC2VxIAAfiqg3AJuvnFH5DL6nlMWKBO7bX0opHK30zkWfUbttN8TmB/RlaOAyGJeW7QMw14f2UrcBWczFJuUxoj7u1I81OPTNnMIkcqQdd/e9DAYanvbsWf7BX/2ei4Wjz3gDSN81Xt6yBe6kDitAJ3ncdf50D981698hb3cLwL3N//4e3/jn3//P35mq7FLf1BWpJQdHYvIGLpbwKzohck4Uh5TiEzmfJIjDJhMWeH3v5TjwVGFK2%2bNkCdcIHRi4X85LZTg4g2pi7uOJmWwzQnob7lGw2sG4UpfbgaMyGMAHHPhYQv6Hi7fO8XhDS1j/PzJCV7d2VFW3nNwdJ6J1l0KPhnZC1l0e2xvhjgfZ6uQE1%2bX8zrA0Qmwvw08dCNcr5Y4GhhtMUNne034p8xoXmULyimZP5vvRPAOF6i2IykMNRwmiAclskmJxTzE2ZGH4N4QnRsdXHqhRNB0EXXoNeug5RK8ZNhsN7HBogNlogAmZJIT4JfUsNJdZw3FHdqJyWFLWBPok00ROCvhWPGEdxmiIqiz%2b0uekTvXOaYpk05ouWhcJ8zUP048dMJ1WN9OepTOjE21VDL21FfymCZclLn4PJUXl0mLVVY7DcPQEO1RE2w%2bLwuUmVDrw4y//38Cd1NQSdaAGmEgDAw3d0%2bpksr3Sea%2bA/Ri4JwAvPbZGYsWGU9/FvDhwPUIqmv6dkakePmTZQNl9xzxWQOgJ7/XVqmMo1KZmeeKbvdokqJhGPfxOQtoqDMGgbvPirm0EBuE8HwmwFYYTFPsbYTyk/3NmO7oQsVKeEcdkcwkx12Eu8q622N5QoA%2bVe37UQsRQb2JyOh7ZDSvgThZ9m6A42GC7U4Dx6MUm11WTa0Q9VKMj2M0%2b8nq/QQtuy1fQE%2brp2wd%2bysPLnwvTHIc74SILXAXmQQTo2oadzMT8rP97RCDwwTdbdpLcpHR6yOAn027iNoK3JfBWKwgeTMpbSFZ%2bMdhddohsummcZ/pymuySMcOMmeIoOqtgLu9//NkIsmtS4J0OqUIyNUNAWVRQXsIL98AmXNWS2U/sOBdz6ErhtpObiIWrXxf%2bmDinklBKCUquChoQRJ%2bx3bUExebtV6crLXq61enlYe5JiX4L0YF%2bD1ib8lzCwuxtqplf%2b4aNynl%2bcjQOQJOdKNQydzNESv2d0bjS6DAjSjbO/PGCIt1FVjbn4RBNMVuaNNJ6SSrBPaYV2Z2KauIR813m38jERT6EcJAiQCRgrCUvJEtCHA3dSwaDpO4AywWJT5wy8Vk4KMbAQFZUN/B6XGJl7%2bUoLsJTCiR6XpS48DtMhk1hsNqyxS7SlK1CSxxGhuWcLZb%2bIY/NsV7vs3HH3/eFbadTAKZSlqv6rjSxUrWLJHsqG5mnhoXD3mXB9eZIAqiFVjL8hhZeY5ANO8E4CRZqINfohNGGItMhtp3e3DupoUcWXh7UNLC6qkqyeEXp84GWsFw9T1iCVmQibcVPHuIPK2iHftjqaDNatpk3elsQ%2bAurmEWVdIWMuoqoCzPMYW6CrG7aQF5oF0qqGcSq9vaxMnJEM1WE2HIcrd6B7NlgrgRIgozhIEy4%2bxxZJ%2b73ghFY0tBN8HpgsBWFmKMByfobOyIm5wlAVxhXXTy9dITFI0dsW4sBPCX6PmU9mxhQc2H6T8i07FSFvkegnttSXFw4QpIhtn8W655UaDFZFH2PRIPXH9oimAsIO2IY1sJEDePxZKIgn2W9X7AS1A5DInO%2blghw85xxTHGa2X7Lun9Xt/XGDxF1p3yPQvk6%2buQXbLZL8m2d5s%2bllmOxbIumVGZW5KkyJwOMvq3%2b6pvp1UxN%2btc3cUshPfuephMHNx5tMTD2zGKNMXsbIbpoxgsnixjwDiq/d7LMd6%2bdx%2blQ1cZD1HZwMcb3Y9tlr/00TLPEe//5b%2b3gQzz6dqvd9zL0R2pt7sk4C9KsUC2ZNMQarXIrQCf6DamOJVIFLBrgPxeOcfjqo09Z4rTqgV/dyJWkideEy7rHJDg6Glxpv5yKQmxStxVoOUI71PY9mZkElCb2EupbY8VtG%2b14Ipc24EzWKDaijE6X49OdseNPkAG3ua88frkenvAQOYOyHqWNSbo34AUYgoNqTmd%2bOi/0bmLX/6xd/3Lf/IDR6vO8RX45QJw33jxf3rxf/vZv/rL3/DHmjcfnBTayQxwsVZEMrCMBZO4YCwqCcMMRhX6HReTeYWX7%2bb48NTBO682QHMxyVA3O7DM8XBzdILb3R3RuJu1wm54dEKv3Zj0Hxc4Smifp2HgBvkEu4Mw%2bSCqudCG5N%2b6d%2b7j9s5VkZ2w45BZl8IZ1NhvNjAc0Ylm7STBDvXoBLiyBzw%2bBi7tKjPM7z9kBS3TkS0kJYi7NynwLDuOueD74wLPdHRSkClsK8SdxxmapzkSyiVmET52K8XXDhfoPttB%2bVyGflxhO2%2bgu50hDRxsNkM0MEa/FcFFALdaiiUZ9Y/zlFZk2jhmigNcgnGCGAvYZ1QUmmmYwF2mLQHx%2bpk6qFa2VhnpOp2r0ziLEfGBEMDz6BhgbwG8fUw2vCcJgRJWrj9BO/PxO/R1%2bqiPktzIa3SqJKBvS6lvfYbcNPNeUxNGfN2lP9H5laHTxdU6x9CfnRuSOphXKKh9yto92lMZgkFbyERZaN5CsDybO0I4WDZEJiFjCUkd4SRtoGyfIzoNRVpAQH62aCFxCwH2TJhkYY8LzjJk3Y3OnUW9TqYK6sX1w6uQjFUyI3KZSYbdntG426iQXKhpMLngCtlxF/d6OZ5vmGfPNjzuINidSKTplaSFFwIWgrkYdpcJiTaPZSUsu2hAewlmw1ASZPvtEHF3KUy1SX8RMEavd7rBMJH6yjjD8KqH/qmHk36BoOmjRTBW5MJMtlo6NtLSxWY0R24lOtZ%2bjS5F%2bwlmDwN0pUYCL9KRPiElx8mmuwralTtT00P1dFffcT64IKbufUM02UHWRSM%2bx3K6IbkiWYOvsXiTffe6BZWJ13CyFn2qb2zMB2jR6Q4QlVtI3SEaAvL1byt5gEt7yhG26MDB/u6PMc11o6FvNNEqMxRXNpWlyvB48DtovShgiK4F3plId15fSMy0gzUNMKCGz4/3IEBjoWx5UGobCbMufUivx06l5qpMw1DSo9Z2/Em/dP4UJm31PLTYDC/x0qbmP/GQJEXa%2b821j/F3FuKLvAiNhgFrJsImlTYF2Cu5stV2EDgZXrrXwP9%2bVmE68PHC2xxE40JqJ5yPfPzr35mjnFTweg5eWPj4/GkGd8iM5C24G8eoFlrlkzfGPvSmKxG%2b%2bOpcJJl/4a9U%2bDN/3sc7bro4GakbB/XcWmhq3SfkMRm2XZOLPcwyMqb2bQrcGUUgWcFj7SrDTzJvaIG2SGTWRqQKbu2h7k5PHtSik3FnUraXj6Q9IyYMGsMEyTA3AAAgAElEQVQBXhlt/nQe1oToJitny/eszydXZdqZQDRucV3gq0R4E1R0YxLBdz3x00OMERATMKdoka6VE5kRx7cvztDqat/m5pae73IasWz0wMqhlRH2a/KqcXlh1S3ZSCphw%2bRMe27ZoMxOEXW2VZ9u/0Z2NhmiCLdkLj8dVWib76OGfTLPjFRFWXoCWx5MJuUGQlSlvK6mg6MzXSNkQ0ZtdFcLLvH52g2EONEIBrHhNwX7duFtN4PV5sE%2bNzYPPydJurU%2bxCbgWiRRTKPHX/nGE7eQyLBBF3MyXp/V/Nv1yK5f4glvtO0Lscs2kWGPG5ZM/p1VWgCOmxjaDHMzvmQCJYG7o8CdMsbCIXAHhuMUj449OGUDdz51jvlhiIDAXZIH9aI8LnRCN2sxpgYifMLvfuzNwfv/7t4zX3vpU3d/4EeCpnezm1m8oR%2btRxYG8/Vmp%2bGVIHC/5k7x0nmCt/ZDPEZrvXmk5XdF7/UWGlsTFMzPMtNVSQ2/zjIaxS1cbBZz8Xx3ThWMe6czpFst3GxoIqrVtPOiCNgzJrnK3WgyutymKA8uYgWeXwxTzvX2LXKyJLRAQlpC0iHIp849x%2ba30tlHwe5i6iDuOBj80n//tpd%2b64deet1A/7d44cKs8dbv%2bODeZ//p9/3KYIx3EgAlywxLJulJxvK6mAAXD/6b2utlxsqeanFHRjBJK9y9u8SvveTgjV/XBIsoc3J6zEJKkkluEi5V8CfMOBl0fRYldsXCzawpZpLkRZ5mwJWDMxw/s4PDQY5rmy4ejSp41J4LanPQPHiA2dVrJsLDBUCTVsiy%2b5TJ8Bp5blN86fGp3oeA4Sfcc%2bRZmvVNEnRr7%2bGv9yYV3tDzcXecy8B/tufj3litJYn4g62mfPf5MMPJvQK7boHFNMJv3MnxzvMZNt7Qxeleghu5j909Fw41YZTsNBvYCiDOEA53uATu9Ls2YhQ7mNfP3AJuy64TIHPBIMtCJkcToFxngXnqyYSqkgJzBrl5m7xmwByZ3WyE1Ouh1cgxSzy0Qo1jr0B8qAsGTyMLtUlgbYXqoTmlLsKMfWrpmfzKNpSiFoGGIOvw3uy5VkwX73OWG3VkVQor/5TtwKoZeO5FSm/WGaZpgF6UyWakPoHwnCNTVMlaPtoQpD2RMB7GSUYmLSM/oLaYkRvq2UXrXtO3kyUncA/mU9lcjpo9bOcDDBZtLFBIghBZ96XvSYJqOknhB6pzn4w0AslzMjH5WLTumqRa17oPZwrcWSCGfvJPOyybIW0pGulSgXrI5E5dsVbt/ARw14UswOGQER8fp%2bNctO2n4wzXrpWYnIWIuku1kjQymZ2Oj7QoZN0n%2b0EZzSo5tQL2jzLMb8RoErhTStNWi7%2b09J8C3B1E%2b0vMHoboMOekLNGIJwJyhbUrOkhdC9ArYdUJ1ldApGLy5ES077wXymQI3mUJLulBrow7wSQPAtmNsIfzfIS%2b38NkrtEm/h/9p9lS58lY3iPWkdSGJyNsRCz2tO67TIbNZj1h5ql7tx4FVhE%2bWE6wGfUwSIbYDNV2ku2XuUOkkw00OgMEhuEXttvIWkiU0Et%2bDfPYezUPZ1XsqFlhmI4Rlow46AIkIIJFPg0%2bE%2b26S%2b95aoR1LqdGPSx6Mu9RzqKYtb4B1H/zFbLpBOcrxtGw0ATjtiDnimwhk2e/37Slzg9anCvyI8SBuulIJMSAdgE2pYPdjovQyfArnwjwu6QizhS08/rPDypUSwevHCSYzRnBrNBgfxrlmP9eE/7%2bGaolHWR4dlO7QI3MUBLMPQbe8nVN/I3/PEePkhvOzXNNmJToA%2bkNn3pxbv6NXtlU0FQe2UNSDBH5G9Je1MEXlRZoagUME3qYpCRHXNGNC3BPE5EBtcUWsg7YtQ/qRo81ApYij2k3ltLm/L3JQkwy77srp626te%2bqDoZEBmgi0ZFNd%2bzRArC3Yt5btLaztTjMg4paLcxnM%2bkjkeyc1tfG7%2bOzoIxmCi2K0yqnQLwlgB0RZWE6f4flGVyOB5SYzRVOtZq5SaqtbWTNZpKSFvFXb9ricQ4cVlVtcKOluVpzFk1qrhNIRcJoFmg3HaAKNy6w7mS6KVNhciJ/isTGgHc7S%2bqY0B4ur5kNHeUyklNRq1UiTcSosdGt8/38nT%2b54ailja3XHgMWVtLeJ3IRViTBk1XEn5zEjf2jYGSzQbYMv8UssvaQSKJExrrRSKQhE3IxqTriT873pIvFCrjTx53ROZoMcGmmOuJ86mOSLfH4fonpJMadT4%2bQ7u7AvzWCyyJRK47PRzJgASYXPnw0ty7ji8vP/PRu8MEPNJDiS%2bc//qPdnfg9PVYGlvGnBMQr0xh77hQbLV8tNWV0qGMaNzlDtyVOrVuYGsnMFK89ivH8jQSv3QuwedXH8CDHxhVfzEp43i1nhlcOQmxe04J4HEMkgHo9Ueqs5lcbOVLpNOAN5qi2FAtxrRKryqiBkSrP1s%2byxl/a/iN49%2blLroxqquA6MXNCClTvdLG7oWutAPeeg%2bNf%2bDvf/PZ3/anP/pMf/aavGOt%2b4XL%2bxHd8cO/v/tT3/fw7vcU3DqoIk6nulEVLJaWfFchItvOsksSHRVppMRopQaxFEx48KvG7r1bIr/rYb7vYeDDE4dVNXLp3isc3drD18B6Gl6%2bLR3Ln7j0sb95AdOse5s9cl8HVP7yPs/3r0pjx3QdIn7lmrsNB/to9xC/cwOPzCm8c3sXtnRtSQZUVHrc31Qj8bLwUF5jBeSKJgLJLtdZ/DkT2wnu5vAscnhg7qlWCow4aRjvujVQ3LZFTI/HXiWTNUq0An9lh8nvEx5bax50Yg7MM0WmO5Yy%2b%2bCqVaR0PMZt76Hyzj6uUqbRd7PVTOKWDJHJwrZmg2yY7Qr1nfiGB7qmITQaEI8lQnYiFQJgspX6/TDRynJYsIlZ6dBH8m7jwxe5bW1ioy9SyyqRs2TmnSwXy1PyShbcLsVmr5bNfpp8rsKCkqsbKmz3RRS5KALQCd5bjrrNWT7YB72CeqQZNypRnKmew17GSztSsTC2gt7vmcQqwlhZDi3ZCtN9jJ0oB8UYmUwfushvnZESN%2b2wq/W3gdxAsUh0b1GETuHsuxlzwaLE1y%2bE21BaS8hu5dtfF6dwkqVKV4BdYDCJ0d%2bnrHsp7BnSVeULrfmHieaJx6kC9/qfXwQijQecDunKtxIN7Lq5cLTE9C0UeMx6EaPYuAnfRt7c9mTC7WyXOjn10e6WEn5mQ6kc%2broC2psry5E1WU14Dd7U7NdpyAW9Aq99AEM6wmCkVpc4aytom7hRh1l1JYQjeg6wjGvZksoGwZZ1mRkhmPekDQUe18NJLTbEm2w7CfsmMVa6KqPBv4lfeVKbaEIei2ZZS7KY4j/Z1OmcQbChgJtAW5tF8gU1Ulf4tSXN02rFFi1a3vl40zG/qa12ZJLv6%2bQge3BVLx5D9yrvdoE9xBaH8xaAUsnf6HleiDem0J1Ka3BtjOe2i2aFco8Ryrmx83BphMevK5v7JPkI5mRDb5nm8LpfFSF%2bIBcm%2b85kRtMeMvXsj%2bE4bhWF3rcyD56KWuOm7CNwC/%2byhg5dOXHQuh4hp78bEtocVDg8KqfBMhxlakvvjAouhB69foXwQwaHMQECDcfiwkQfyDZTI9Fr4L39wga9%2bTiunkr1nUTO2BR3TKJcQnTMLvVngLq4tpThxMGlVdzj8HOtYaJVZur747lLmqWmaod0IsMxjtYdMmJxK//0VSyJFpuwhhEeYCVCvHzJvG4cZsWE140CcuGrVku3YYd/2/Y7MqaGjJd4tSKVsRsC7zJFdtLwRFkUHDcp8pGLx%2binbSKn15JLxGPmYCEPOQmdaecmZnwiob0VqB1slp/CbqouXPhSGYstoQbEZ4mvixTSHbBVF/8221ReFOBGGXgGz/F5Dy9ShU%2bt%2bYS4TW8e1A4wdb7ohpRSwEmZ9VajKXNDqzmsd3f5ae2Srr3ramibrh0kw1a21qRxrwLtEQ4wGn7r0OgutOvj1ZoLnF7tiMvxSD0KJJ5HmrNh1Roo9%2bMbO2K7ljNguEhKUjNaqpayVynANIhk0nKmbEyVpzP8b0VlmvMSX7jrwqxD3PjlAureH4Db9%2bs3cLD/ooOCKU0p69AjNzcv40vILP73b%2bNAHgBTj2ff9QOu5r/nekpX/XGYyKugn2GVhQUZpe00HYbNCMvcwWrDwmm6Yz1zq1ymTacnHdtw57jwKsHFZN4KbmOPuwwa2r/m4NzrH1XZfNiDjBwW6V8wT4XqTA52O3YO6Yh%2bpUhg%2bEWWszobAlnA5LkpGJBz1Zd/eVtearS3gXNNK9KAEZ1MlMXo1tYN1SJxC5gzaVeZLYHbk4dq7ZgivNxE2HQHuxI/lx3/xu/d3vI/%2byof%2b8h8RcP%2buX977ob/17T//HW/CNz6c0Q%2bZLCm1tp4kPIjGaqadiJ1hkSh4t6BdQu2sIDYq8bHPVXCe8bEf0zbOLj5GlyEjFOjcP8Cd/hVZJC71tbUIyPf7yurtPzjD4VVWOtNd0%2bNJhat9B0cCqFXTxfIwrGIqlVhNg9tObq0euXAdngJX9oGjUwPibb%2bsVdtsOC7uTgo81/FwMNUCTPYZXuv5eGB83Mm%2b6BA11c%2bMaI2X8Gji4GpbJy0BcIWH6DjHckLg3sDJiY/26QhJ4qD1XgXuQZul5DP0uWMOffScJTaaMaKoQuQpcH89X7PuRBrGTdBh9T5TXttul5sGdD8JRvlpydSfj9BsUjpgGEcwPDtG4Ss76OYj5H4PQT5CxtdoYVWMEMY7ot1sNUwY%2bEmP9yc7uvm3XbCpG9W9ORc8Lk0uOjYZyOgVJ0kpr9kZnwt3l5kj9cNxsEiZzGklP8yqVycOMl2LPJHvkP%2bkAum6eqxKhFY1JtEJAa5RpnuaEBpLWTurRFQrlbGJqVZCJoWbjKsMfz/z2wgXmQiYuOZTw0hJJqshs%2bDScqZVVNl1RC7j6cZ35S7Dax2GAurZj4fzVKJGNgLwZZr3wssrwuQpspgnPy8uMu0Ax6MMG23NQTg5z3HVgHdJOOynr9O3s8qlwCVhPzx0uoUwOpePMixvxAgLTeQT4B57Ev9JCw9b8ULOZTXe/L2zGWFwnGB7J8B4ofCD19GJydTrSBSpTTBFlFHrTtcTMo1k1M%2bRzjaQhWMESVdA/HTpIyzaSBqsuNoWC9JBMkav0VGtt7GhU/CgwJpJbHairxc/of7UFkcR4NrU91PCYy3kbLKnAH%2bR2sgIEntFurjIJpRAcV6hKVVG7ShV3TsTUdmfwjZZ%2bE2pi8HrUsbXyF6WLnLjqb6anCSRVM/HirbqqqMLvpXFyNbeMOws285rtBt57fB6jpXnVL3zGHaYwIdAl/p23vcF4G7meJFY1YB7VuTi3c7NW0yZjAFtVlZE0B6RXKlKjCfAT9x20d0P0WDUkpU%2blwUeHbp47SDFdJIjGbJ6r4dylGE58lGdzGhTAbd/gmpOxt0AY1O9t5qUcLIYzz7n4Af%2bVo7dtuY9sCaC1Hjg85sbxp3ONnUQJwBaAXqSDxD628jzAZKiLY5clLIk%2bbmA8/N5hI1mhrSgoxh3eK5YP3ZYdp1SQKP54xytJIRKoIxIh8pwlJKbpLaQLHJXQX3dRZNcsliSPuYL7V5Dn%2bJlQX29w3PZY8UzS%2bozj0XWFuAuOQ6tGHMxMS8Rt1pYTGeI2i2UyxGqoGeYd/1JG0mwemqTfTNBMwpW1WOFkV6yqjO/pUQUUPtuSCcZusa83FxYfT1TkKyJgevZd7X3/MNMdSqHYSJrXfMumnBq1R2TbHoxyvtkWz7JmHPTwoTS9Uh%2byqUYUtCuA%2bpxv5bf6CZXrTOtbt1u4wRPrTbWem5xG5sV6LR0M0P5mK1QazcJ84WPdivFfKF2l1Y%2bM5xF6DQmSNBBvpiph7sxEOH6MpjSvlcdZop8Ddy/cNtBWIa483unSPcvIbz3FEvI00dwAh9e6SLevIyXV8A9wNnsfT/Qu/Hi91ZHOeCta93wcQ6nerd95vK1KBdmflyhUWWR4RQ4RwuThxmevZ7inHl3rHPyIMeNyynuHIToX/UweZQLeG5eZuFHtcfmMXpYonfVw9ntHFffpHp3nc88uOczlFJNVSXfwyGwsaGSS3ewwKkXY7uv/W401ravH1byXJfJyN8rD87uGMVhF0VRoLcJ9XMfeHDeOMGNFztoEEuMNfJQfeIXv3u/ufzoVzJB9XWbyJ/6P1/72e97z7PvuzcupbAFWQyRCMxMApRh3CmJEUcNycivkGZqbcdGWcyB/%2btLJUa9EluUfjTVZYI9LL7/AMnNa3BvJXCej3A0ruCZ5NXm4wMsrl5D8%2bA%2b5levKxsg22ROBR5eGB3g1sY1Df0%2bfoDl1es4F1a9pqcSu0OC%2bgpHpyWuGrC%2b6uBs%2bJUNoFYbtMDuYEo3GlPWVuz31pXh1IFeQ5v%2b%2bBR5d2u1mI6Oz7Cxv4PzkxNs7WzhYOTgUkf1bqeZh/Aox4CNeM/FycBD52yEZe6gf7WJKy%2bUqJIcvW6IIFyibDWw11xKJnjDY4EAas0zYyWmE9x6O6E9bZ4pmy7JsmS4DICv69ntTt/eK6%2bNTFOXnq1ViRF/FymTIwmbXVaqk2/S3QvfS4cIvihjgx7/5mrUW1Xfra4J5rCLtAUoJvwnSWiBKxXjJDHVJH7xU9Rq8gQE88JyGepDykSnpSyYlN1IxzW9V/zUJQlVQTsPlhrnxoKyEjrHbDQ1EdVuYESKk5Vo%2bV14Hsu%2bq2aQ3rd98%2bxYPl48thcGMBuGRPTtBNysnGpClzIJ5wH82QzTVgf5KEfolWBNFwvc2QUYGjyHi3SWSRVVMvWcMGZj%2bsM7OKVdJDelstHQOgrL8xD9vQQHD7wLdmJ1F6Q/1Or2B72pVJb8%2bo0Kd%2b5W2GTFVGHKHcR9usmwXdeOMllOtp2OMwa4O8DVYYHBZU/mAqmaigrMFeuU6nfbbHFidbATzyX0yU0353niTsOLYAkX/e0GzpbKgKr%2b1BFbSDrDaFXGi0ccsXqmhSW6yeemlAB/0%2b9gkBPgt%2bVctn4AQS3bmIw5i6Xo4SLxRwhpgSj9a/1dlo3U4i7ax60Mhefhd9pkTztCLXNPHTC14nIdaQ%2bxtWE052g3TVVSo3dlMimBMeU7ors3XX2%2bVKs3fp/1VOc9NkotSCWXXND2kZKijl4/bUVZ%2bEsY9p5YSmbOBMm8i2U8QGu5SbWoJGdzDqgzgvVW5oIvDjFaWPN1zlFcMMm0T2cGuBiJTOxHwngyOtMylo/iq27uaUtYxRKziYd/cLvC%2bNjH8291sO9XcJcZ7k9DfOazSyzmObJzDT2X4tWuFfxcthndY2ZbevPGS1oIghGfcYxmd4H/6D/28O63Ozgc0iFpDRvlmkWWtAbtdjazJEPLJNPTTYaNz3%2bzEbTIlm4903xdHE/AGn3epQHV4Z1rCaOenJdGyVwAvT4zk6AqbyWc10JMeqjDUBA10fSHsq7y%2b9iH6xsMee6cm2YlWi1lHyW51faJ1VSp/ZZ694BFQIz8YD6bC4CvbwhWUkYjr%2bO5Whhj5vaFzGP11KYp4IR4E1icwYm3MKe2VvLagM2eSl5oGxmDspr%2bqhq33J0d9Mb2dDr30abUxnh1r/rfU8C%2b/ZuKnnQ9sH2TQJ2HZaqFWGDxN2PvKDrytBD3opVcxkTa%2bDmOPWtLKrOC2cSugL0ZbHYN0k2Ljkv%2byeZtKDFx0fKRQ5LRHf7Byi7tvVj2XOb%2bmkOOaPfpSKNTlLGoXttAsm8R4NPlJ/AqZOggNcDdFhQk0UrGXTaBJI8CYDRtYD6e49WDCtPzFqo0waun7SecZYyXO4sweSws5CDeuoIvLL7401uNn//AlZ3u8Wdvvfg928/%2b%2bb9XHRO052unOPaZdonZWPMASerMJy5GJoJADwtWGD9D0%2bQiAtPDHI6ht2Uc7foywibHuvHhc%2ble9jAi476vlrnDgxK9y45IVnpMUDeM4HDoYRsz5H0aelTCpjPZVP5sNO1CxlOKR1bdusaw%2bODmmqHn3y6QYDKI6I5YyPlOT4Feh6ZNHrw3TfDMWzrifEXZWeeGjy/95K/%2b0BtvPPyZf/kVdJZ5HXD/0K/e/tn3f/Mz33JwWO4OR9RZs9gM/UdVciKhHLI1hnVnyDFJgUZDw4%2bh78qi/Iu/XeC06eJKr0Q7CrDddfGYmnTfgmEmBnhoP7yP5AqlMGtaaXCeiRaKIcbNrobnOAXTc4YXzAd4PspUe2%2boKHH9ZHTA9ZA9PkR0dR9HJ1q%2b2u5IHUPB8zXyKPenFaLJMYrennxHPD1B3me1Nx2ZjekZyt4OJkcnWLR2ZaLZa2sWMs9xNK9Vba2vcmWhFRWdCn7DQXCYY%2bh58GYJjl9to3s2xNJ1sfFMW3SaW5tLdb7ZZKYDsNsFNlsh4kDvMaP0w50iK7oiG%2bGR5lp8h64F8zSR5zJauLIAU1fJstyhP1k50NhJRgppNTWUbWobrH5XjGy7hO5E7fuEi8uUffcyVtdT1wlhOsJCdPD6nNaHzLcsD98oMaEtG7WFwmIVCH3rjWwePYF3ImZ4aBEN1/zdaW1pAyryuG0kxIAYAnYmLtUjJAozX5%2bEupLNGOBuWUcR1xgQPmGpeya1mtFq2XzRCBvQbjcABG/sg5NlAI/PejbDeS9Dd7Ehi5gkBxE/LUpMXVdcjhKWn849LKcpPKN1X4xdHC0zSWQl6LSTiOuWWIwjsYfkuejpzon62WcL3L6jTjdfkcNafRpLvn7bR5kztEqGM7lgAym6wqIUht4yXOIoU3jo9gqkaYVLberfSwHiAtyF3fSwF80xTyIcLIGjh038znVP7H/5vOIhGdEc73FTXL9aomTODKvpLdRrnhVJBXwzyseFkmFIyZ92ETRp%2bdgXbe%2bi6Ir9WdFQx6WGSQz1ycpPWIYPIhshQFcArDKRtVuTAmN6mHMRHhodPJ%2b1FniSzB0ZKdahhX1dwuKRAnr2V96Trcwori2OunxYRpzfKYs3LeNMEud0oVexTqJV1ELwx%2bqlUU5fdT03u2fiTTWqYHTr9FNnIm4kmnvq2CsZw/2WY5JHK9lETOc6h4km1Tx76UpPMO18ybLjAtgtgK93OgMGrESHNAv7Q9OPRL4hchnDZlu9NTe/V/oFsqWHDz928MkjF2dnPr7%2bvS66swIHJxWGcx%2bf/ewS02mBakLbRw/lMBXQrgWWzBiVayZK0rbidRZ89A9KvOt9Eb7qDQt817c0BLTTXUNcZChprOns67fDJFxuUgRXmsTCFv3dU5PDZCJY/B7fmaIZxsgLojFHZDN1uZR9dtMa484Tjy/YQfJitSokIWiTWvfV3mLt%2bpT7G3Dzc9Ggk31fg3fejyskGjdQUUTGmxEB3TRY6Y/vaWQ1ciYImqr3XcwWiBkGMr2MVVYRqOyGLPsM3MRyB62IMZ2pA07o54jbmyuQpJEWBdDcYNq1gddIMD6d6zreamaih5dcJ2qCzTdTOsrxLFEQFjTThltHGOo6dH5WJDwFuv45imDtNqNWpNzIk2V1xYO%2bGXJrSstRD3FDkz%2bPz/V6aWPJvmk3koLJLDBfB/HlcpgXxWti1IkH5yXaJnLMy6ppx05tY8t%2bZiN34uxkzm03/fV%2bZ4E5X6Pt6UzsJNfvWAF3Af2a%2b8EcQerbRQrMdcMtkVRtZIupVFIVPTmLUUrlVBfjRaHAnWRR0cD4PMPj0wyLxMPxLRfT4QSzJ5xlVhVUTx7CdXy0Nq/gs7Nf/aF33HjpZ9hvE2frW%2b6c/bv/qHIdbBQLDObcuDnYMDlNq41YpbJrtlPg0KCiYDkz0bpfcma4cxRIPphUsOXcVADdPV3gZsfFCtCz8wiAv%2bKJZIZrQPeS2qZyg8b/KH8hoOZkubGpixrPORjU/6a/szpqfR3t9xS027lktRabR8H%2bz/fQKpL9m1IZXmsy8bAR56j%2bpIteg4SXB%2beqh/3PVD/20sd/4kMvfeSvf8USVF8H3P/2hz7z9/%2bL733x/bcflrtnQ3qpUw6jnYRsiu5WKwGavCFOhOIusyzhBwxJeQjcEv/ikxnuNBq4sVmi2fCR5ZqIOhirrd02q0Cep3ClVTSrSTpmLXtXpmPDsMk85vm4Nn6IB90rkoBBf2v%2bL3v8GOGVfRydclemT10SCkwGtkpqgDuTCs9WR7jn74kWTFxmJJahA4S/y%2bdGJ8ja28J2T07OkHZ20Z49xqy1h%2bbsFIv2LhanY3X/MA%2bzvdvB9JjCiBLtzZ4k7e3GFU6zi8D99FYbr4QZ3nE6w/nEQfdyE1ffWCHoeGjTfjBcItjysBdHiF31sg8CatoY/jR8uUQvdFZL844A9KzoIc21el7HFKARKMIw0HwN1m31W5t0xsu3v3eaLhazEaJmV9yB%2bFn9mwILAn1Z1MhyyUSqs5BdQJ5c8wXMCIuufr1MjtUkMK2m%2bbTDbkyYILbIKJ%2b5yLAKE0FPdpN0IgDf5heY5NO%2b2Zjw2uss%2b2pulYdG682O3OMyn0iflPNIqNLBRqfA%2bdxbZe5bX926/GqyUJae/SwLR8jm2wjmMwxohTXvC0tCdxnr5c6QPAMKwuwz3c1jxcFcMvinI1c2v4Gr5zyaqp%2bwbDTcEstxiO5WgmQSCXjnIQkzNeBu2//LNO3TG5yaR/sXs%2bCQbaeV6tWrBaYDuru4aNVsIMmE77R8ZNbOjWw9J8%2b%2bTpoZbWSbATpOCZrfMcJCvSaJlJNliZ951MHbt5c4iUK8700lgh2/mi7g3BpW%2bNSrFe58vsKfeOMS3xmVaGxo1IHaak7QlKDU70/CmVKMReV17C1cDBihWZgELrudpLSB4JeuMrogXuxbKRNejfOKU9CtxhQgMm%2b9GN5nAtu6oJOd5EUbb6odChg3jC4XUH6lhNL52lw7Lu/nvKCUR5Nek8YIkWH85epMGXHOjlSBrK9RnbomcweMBot8RaqtWt7PwWQGNDsj8cLnEbdHWEw1kfXLgfQLncQAer7WN/p21a0/0VMmcW4AACAASURBVJVWwJ1SSaOjRQsdnzIpBfHCbIpYW4FVzCTuoYv/%2buUKnSsh%2bl6F64HZDM1K3H/k4ta9FItpiWxcwZkUaPRdzE89OOdjoNqEQ6vaVd%2btgXaC84MSf/zrW3jf90zR7wUSyTs6rxAHSoOylejhzc0G/%2bPYtE0nUY4aUKyz20ZIpdEncXMh0igxTXO0Gywf48J3TAeoNRPLpsvzFM/1JxvQnFXam4W1EuQuBbt8VNbu16IG7ed208HvnqV9tMJzYSkIzGnJDKeLyJtIomorUJKHoFEZdxMxoaSQz0aSVee1CGqFqFbamrM/oS%2bjBQuG0xxNMmfhJTnjfICKBZx48gWrYbH2AB3Gcq0mXB9mpkaCtF20zt9SYsagK9nQ%2bpgnCZrUy9NFxiQ%2bU%2bM%2bZZKoYdi1Kqm6/UgfF1cY7rY0H4GntF9vLR%2b5fi0YGOAGmfbjxgVJ1jYqK0wJlCnznUyz8/Qc2wTcq5nDgHYbqZCoq/k7%2b5C9nZWTjHkGvFeRzZgItK6l5rue4hVvu5GVAM8uOMp4WFCiJDVquF4ocBfzkLlaQkoBpkYNuIvGXSPEyaLEwXGFbJliMmni3mfOsTgM1RKSoEkYAjmz/nR8%2bAXw8vxjP/S2Gy//DG0Ov%2bZb//aLD5If/OUrLdw8HqZqw1s56InEkUy7UuCTc61fIgQZI890JJR/cz5yMPFizE8yvHA9xSsHMZ67ssSth4FMgZTPXGC9eWl8dpTv7dE6Vasy8xBiiYCajsCUrQqAd7C9XWkFVnMiu4mSu6sTYHS5olkDWffBmiRZvcecX6JKXPMMoUFTnQ2SCX/aRcd1EHVdFPs%2b9n4LH/7S7f/5h/9Igfu3/M3P/uBH/v5b/%2bath2TcU/g%2bte4azrdJqqJvN9qpRVJKiH%2bR%2bCabmaxDocA9DPHsplZW4%2bQtpW8nGZyA9kPrbE/Th42N4LpcfeVIuSQTmzWicfFj17Yvjx9jGF4Sv/XDkxKXd0qcDFQyIkCMCQjnj3AgQB24UR3hgX9JHubVswSPtkKE4xNknW25tsnpmQC5eWsXl5o5jucu2skxFs1dOV97dox5Zx/z03OdKFygvd3H9JjiB%2b0kOimy/DattnQ3EhyRcXeB%2by5mIw%2bff6XCu56bYjgGurtNXHq%2bgCd%2b%2bBWwxYQ3HzuNBfrNltgCst3VNkxbyne0KFNasAQv9dFadEfMLg1QF5BNNwij4Wdz23C47GbNbMbXyBzYHQjZy3akz4Cgl7v4BkYIxXdaF5xu01GgQJ1uLRnvieV8NYgsnLATXtNUr9NrXk%2bsluHSgVQJQJdkX1EtOIbZN8//iV2CbX%2byIhJRMKxnHdTzvqd0jFltV9eyKNkSyeaUukH6OuvFSUK2qVsgY9to6aVsd3skkgO15WLVVh/BfI5Br8De3MVZEsP3ChCjMYjASZ3AfU72MVO5DL3brVyGiar0qj4znu52oubENj%2bPRBI2osSG7ly8FvY3U07dpM7pIsX%2b8rSH8ZTXCMJvXKcTlINr5ueVy5qYOB00EPeForzAuF%2bQyRBskP3gBEZf5KxC1ArQRgGaO7QoiZHoSoGZ7%2bALd108jGPsXa8krP/vvdnFJqV4OXDrtMTD2Me/%2bDgrurjYn87wthJ44Xouhc7oJkrfcAk1m4PA3RYuWS2gJoFYFltq100YmyF0MtpMIpUF1gDnxUI3xNIXV3px00lkMXBEQrPl9%2bRcVqbCv5BBl9C46ct2kZZJ3iwkfL482/lUgQFkU0Cwbi0s9TtYqVRA%2b8r5xXipy4XR532MNLmEKHyMxbSDfruqucJYYKZUvwChVT9X%2bZCZNZ/Kqj%2btu4i3vqlvIOPc2EA%2bDbgTqDVCznkjxF7TRGJUE0MXh6bIKLlpUceF0bjCr5/luNvoSP2K68yVofRyXuLgoYcv3UswH%2bXobnlYjhxU4xyLMSujTAxoL1DcTeE956O4lcF7RqVdEoE5KeFstfBX3zfHO14MhQWjJR7XqvrBf7Wf4ixCIM%2b5k9Kep89pHgIm27obWGZDhEFfijKxlftRjnGSIPT7on%2b/8DM7F/D7B41NG93gzyiO4BUTzNJoVXRPnoMZc2TdZ8s1aGf0JubczSRgOsZI5W2OLdXO1x1nhG3PO4hdVm1dH2zDqGUKNtF3fKZriy3ipBFLXZeb5QjTylj11TYGzShEuTgBom0j3VRmnd2RhZtazilm2EVcnsCJKTrWpG7JQaJpQyvHXAo8pYjCEE1q5WuWjfZqNaKlwN32dWX%2b1b2GfU1cjlgU1BQ5urDpN/kYdRacwQf%2b2%2bYyfTnpGK9BNh9G/sVmkfypGii097weh3rlomOndaSJQtb7mCasGqe8Gpi37%2bH5WXTJSn%2bVbLLg3UThDHDP5iwG6GrfZzSGGzBx9dJ8q1nuC3C/9xjIkxSjSRP3P32%2bdpaJTdhQ7kn1yNnZCVynBzz3ke/uuPOPUv7xNd/6P7x4f/T%2bH7202XnPYERSidI7tfHVXaaDSS9DZ2J2AqaNRga464YDGHkxFickdtctYmWwq%2blrNfHrWO/QeeZ%2bjh7lM/cLdC45KvGsXGwXcxwbb/g9Z46jUh%2buBeRbmyYZlUmwfU1CXW/MgTwFNtTwSPommXl57kZKY6Nx4qrGuScBdtoVDp7P8eb9EAHJpCs%2bWr8x/PDDe7/wRwvcv%2b2Hv/CD//S/fdN/%2bMr94uZsnmGxZEVUPvh6Uqpl29VRJs19LFOCEAXNDGX/zueW%2bH23xTQJ7HS52AYYTSh%2b9dA7fojJ3hVldE8PMd2/jOLhI3iX9nX1lwVHkVPz5BCT7X2JReic4aE8PkRw%2bTLOhnpN2pqazCYgynPhjw/wwL2MmxseHrIcrykEIKWbp6dI2ttoTAfIW0wzdhDPhnjgb8N3XLRmh6pBi7awd5LjZD9Awopf1pJR0Jx86cqflZcxam2gMxsqs8GQJeltZvwf5zj3XJT3gdkkwMt3K%2by/fAtb776C1kYDjdjF9tZSqolWaQj/UoENr8BOhxnZTHZiESZujmjr5yBqtGWTwxD7ImElMol5K8lgyHidNPT/653R9ntbcIj/tlsCvSOzi2Xlw5VuT89ADTx13fxEUI0Rxj0MZ6qPrTMbF3nM%2brSki45MrnSnMfIanm/tVqNTK0G71as/ef0iiVmBEr0B/vN1vuyGWVOWvuYsZLuXuTROluOZg15H%2bxhZon5LGXcC7ifZdplcjeOISHQIuqIR8tkOyvYI8ZmPQTeFO%2b/DT3LMUUoIkNZ7fJb8b0wgNl/r3M/PXGzvl5iPtRhTI1BpmlyqDAXmX6jt6uF9B4MXgd0vApkDPPNMhUd3HHzuDTlevO1TfveHB%2b6mQI1d0C5drvDwvoNeO0Czm2A6DLUMuklM5fOjJzf924tc2dS8cNHrl8K2U0LTaAfoVqUA7ZZIjhxZQD5z5OC37ge41q1w%2bW0e3rFT4ev3HQVztG2lhRaA1w5L/OxnAT90sQwc/JXFFP1ghuZuLNIZ6UOm36pUxno1G3BgtNqasKYaZrtZsw417DAEOpSv8CBoXrHttQ3lqi8TbPtjsZsUmG/AtSTC1vJBWACm7tbp%2bgxPa%2btynIgPvokWCftJZGHYHluDeSVREwbdgHOJpNGPfYyw6mLCc9aiTToHqqI6bo3FGcZuiQ3WujgQbd83Y/6pf/zDMO6GCZXKx/Rqj2lJGJNnl1Ny8RbAHrIGB%2beNEovUwUdPC3wx6KBXFXjmEguolHh8VuHgkYtXH6SYjXN0%2bx7mZxRJ51iMAjgsk15tAKwvIbu0NQyTlsqoa2eF0Bh/4VsX%2bIZvD7Dd0YgPE9h51Ik1idAYdo0A3hIHVvJUZ93r7WPnsCYXP7PhF/07PATOFEXlIvQ7SAsL3EdohREG8wZ6ES0in9raqxctIIiDBIXXQ0LUpZOAFkOLIoT%2bCMu5Sma4YWD1ZukCFXXubRkjWT6C5/YR%2bSMF6Z6uHzwWhXpZR3ytVBY/bsVYTKYIW03Mp1NEJI7MVWm0QJ8pJaeL2Uz%2bLuSUGY9V5aFVjVFGuqZicYIy2kIccFOjrT9fkhhZN4BGAFg3IZdNtZC69jsresRzDVxHC%2bwj/4M2PzYHg5Edu%2bGU65YTK1VkczLkWRiETYJSmHLzXgH79XXmiTGz6id2024LQz7xeC9wTOb%2b5ktWmWXRpnpSrhJl/JsAc56ntobJOmbaSP5kz5VodDYtu2gGY0xYRZmkk%2b/KGi6VUw1wJ1GjyanAySgQd5rbjwjcE0zJuH/yDOn%2bvjrLMFHfMmKOh%2bT0IZq7N5EOZ5jHP/XNzz5/7bN0SvnG7/rg3q1Hb/877c5bv3dYBnCm84vAnUmqkwJbrHFTawzLuitupNtahQcnDalCzk28YCdpAnXX0V6z3mbaTa4QCeZlAvjh3QK9a55211Wysqk/QgMVVNjeuCiRsREPe3nC2Bv9Op8zNe9MbuVPOz75nXwf54m96wUe3Qqw3ytw/80l9lzafHuotn30Pll95u4XfvR9L/36f/pHJ5W5%2bU0fef%2btX/tzP/K52/nNPM%2bRJPRqV4BOWYz%2bpJYcAiLSLMAyy1AsFsi9niRHsKMcnMzxb%2b776BNw3PRRZDrpsEIdvcTFqtQDjocmxKMwGHsbpdg12uG7u2kemLER4%2bdPzzVJjwDIGT0C%2bpfhnT%2bUn3z3wbRS33ZXmaaQ2vXeLoL5CYLzDdzfDkXy0t/ZwtHcQWtxKl%2b3bG2jszjFyYLFj0q0NrsSxlkMpsLet7Y7mJ1OVVfvAc2TGPO9GdrHTUx3l4iPQyy2E7ROIsy3l6jyEuFGC4M7BYJ2ieKeg%2bkkwKv3HVy%2bf0eSHt/8l65JBnLYzhH1XHRSB85WCtYIaPmFeB9TFkSvUo/MuhQdaMkEs0x4XS7isIt5MkY/diXBTI8KcdjBIqEM5InZ5w%2bpaa2H0%2bvhYj2/GsaxU1PzRyaULP%2bFSormStaT/5p7Z9Ia7SstQ2HPrwuE6h/pw67gtc7ZG6mJYUztuQVMWV/b2ic0aVVZ86cBGJ38GGbrYJbMV0w7v9Jq21eWekbGJcz8wkWTjPusK32ZG9ahP0F8FqoUptkBglM4Z11MHC3CNPV8uPNcwoNJg0DDk6Q7%2bR5jtcokVUrTjqcpAunDprUpUTsPMZ6neObZCo8f6A3RbIXrIN8mKlLTN5%2b2sNUXEPm7Ae2XrlW4f8/BFfnp4tr1EvfuO2oHOVgXXpLCHWIBqUmpWQZ0NpSB4H8R/XoF2BfosPAT9dBN%2bkIDhzMH/%2bjjHqL/Nxr3p74uQi/MsbtFSRI1vapP7DeAjgs82wQeJcAH7wCPyAZFHr59lOKrn5sihY/E2E3KJpPymVqCofi0m1neJnba2YQAXvzHRYdLqZFbY8/5wLWtCY6X4y76bWDp2iqipggBdeWUs5Q9YdC7rQpFrltkcXuhBt2IyOjte16oNSXHSjeme4x6qI%2bmWtRoIdp02i%2byKupY7BrZr6w9o4IITVKkuw6/Z8JCLKsqhAZoyHish780udzaHdp8jQsgwqlwNmtgq5VK6ObLgaG6xp0LleTRmLFtAZCwXGWhBYkMqLZ5xK2Ggx4TBpcl/vmpgzvDEp%2b6HeObv7bCGzbpRQ/QUPGlz0LcY2gBWJxzTuQOl6DdhTNaojorUaW0javgXQ9WZXol6pSp7SOqGM897%2bBv/GcZdjqVPKNp5qDNBNanbMgkZ4Jj8QlpjEo5zN7ATDJ1RxxKZNjCdH9hrEanWOacTBEHIfIixIxuWYZUafhjGRu%2bx%2bTO1ST9BMQz/7Rad3q5u%2bq3vxRkrkWWwiiGw3wjbxNOPlJ3fxNFpb5dCh4yQO13kWVDuMYhjJ/PswnaoaMsPFl539Z40CfKNTiKWQNE5107Hy/mCtT5QrKYSR7JZpdFcLQQThyFiDDAoqLunZtK5sbRk501GSopIhiVXNgrzLGFJk6w9LaBGcH9NlpRLrptS8goKNZ%2bP6PcRmwW165EX7azmoJLdHKhpIbfpyy8Lyy83KOR7rHv2oRWkcEQuJufQvQxEZlRjdrjEhxr5gnrYGJf40/Z/NX3lE9Ouqv5XI1o%2bT0zainNJKWSofWcr4SUL9aF8pbaxsYCd8u4C2npVEiZnEq2nRW6jZMaMVliNO6UB7HUwDwPsJiVmIwWmJceHt6O8PLAgT/31FmGNpa23KnjIT19iMBr4lZ/885%2b4ye/86WPKBD9ju//hb3ffuVN33Op%2b6a/NxFVVo60LNFrrrfJvI%2bTIII/mKHfWb9eB%2b/ElvePGgiiCm%2bezvHFbksNDFwPZ6NH2Olflo3p6jDN9tx4hi82I/Qu%2bZg%2b0OiLyFcyoHvVEUmNRP5Y%2bK%2bco%2bzHGJ6vq03XB6E9u60wS6Buk%2bnr5KRd8/ZvFDi44wG5i93rBR5%2bJkDrbWN0nmlhe9eVhKzjGe6%2be/av/vr/8l990z97%2boD////q6/aTvbd%2b4L3/x899/0%2b2es2bzjjBsiCwUG0S5W1JSr9sJkT4AtwXSY4w9FAs5uIg4fuOJKi%2b9tDBb9x1cIN%2blv0Am23TJKbnsf%2benDvYKx7jNLosDbuZPMKZf0l67m52gJPg6rpMs5QLV3QmBZ8mj3Dg7uPGhov7THo1OzS%2b5UZxhIPgEuLxCYrejo4EWos9qnB/xxeA01ycyvkI0jnx77aWcI76mD3jo704w8mCGdRrqQkHye60icedhez/zmYVdjsOTqQ6m2q6tmPdGZ4ZDZ5D4L69ifJ%2bCq9dIr9HnVeA%2b50Sex%2b9jzkLB7xtGzfeEqMR52jkGWa7JXqVj53Yx/YGQ66xJJwIcJcqqWRSWqLLXCazFSjPMrqjjNXOzbbFSjinDfDkw67/%2b2kkkP6dJ1s7xVx4n2VazGQorjPUjprEVwl/rhJcKyRZBw1/gtHCMQ42%2bmjE3WZln6fnqHMyVscvdyCgeR2SfBKMCxueaAhcJsWn%2bLLLXZkJkImoXGRMasTrwH3dt10%2bx42A%2bX7LkPKztCHMpltG417g0izAaSeBs9yAt0xFLiMbzbkmqbJO1YTAccqKd6zKqppfn1VXAxcNFiabrT3bDeEm53h44GBvs4GzaYrtjknBl%2bqq%2bUWt3locofdlglmrxaUCzt4A9F9RIMalgTKZBwcurl4pce%2beg81WA9HGEmVBvWKJnVYDaVkIY0V5DMG7MJDUvHZ8TIcpgraHrrFq7bY9fOJ%2bisfzGL/7Uor9N/jY7TaQp5UUd%2bOi1em58Fp0YkpxZdfFu57zcdOvsCyAL0QBfuu1HP/6wxXe%2bW4P7z6f4s3XMolYLCtX3aqMFaHgdWPtaPW8zMux1QnVH137lyaLrvu3vGjWE5Wc0VWLwNzRvI7YEWDdKLqmT1foNEkFOlh6Y0TFuriS9F62NXNkmF/SUntSAcelsoo2mVSvhkBH30u9OuVeFsCs2fN60lwt0ijP2MW8MUAzZXEcSyGuwbViBTXqO1820I9TDBcBNuJUwSw9jucNbEbZl8VDolU1FpArkGu17SEdiQrEflMWVuu6w%2bbtRI4waUzc%2bolbOSYbbbTcCs9eqXCzLHB/5OD0LMNw0MCX7idIFwXSGfDWmY9X4wTLgYPqQQxKvsWSyRGeHMWdDN5VfWCiXR4SUcb4i9%2b5wFe/p8Kbrvk4OtcNIa%2bnHfC6HIwSTzaN6sFuXIuM5GG1QJv5TACfsQnl9zA3wUo26vMg3a/o7S4SEnGa0Zwe5kwRsCd5H6E/xlJyK8ZoBn%2bwXEZ6hC3caZBznS2OWKvDJJW6xQglVzQTySRw50emyx6ajQEcyhrEjnUA399Cnp/D9fuI3IkB57oZ5LGwYN6dqE0l9fjc2AgNTUp3jLLRNj46zop1L0zYaDmboxGHRvfP/s%2bE43PdILSbUkiQ3u9xkGKypFuI6f3SzpTHkJDTdYrAiV7wPAS8Ljxl5ee%2bsvDms0/%2bYDvRGYxym%2bnMXyWwR41s5afOfAMSIO2oZh/4Zc63WotM7QKSOFNOTOI%2bo45oNO%2bYJzoPN0PWhFgnFHO9YBJtJ2aysH4Jxz8/IwWnlno/Tx52XZOkU5e5NLo5a8fFaiMjUkqRBebIqi5awQhJ0YHn0y99vgbuJjl1OGX%2bgyP5ZQTujC8PB0xeptVqiQe3I7hZgtcOW4i7DtxbEx1zwnoJ1QoPHm6jvHOp8VPf%2bW8McOe1f92/87%2b%2b/97Zt/2IH0U3nekMaVGh375YNJHPUdFEfX3X1%2bg0w6g02fb7A1YfB75qOsetThNvmS7wu0sX7%2b5U%2bM2Jg3d3CvzmxMOfbhX4v8cutvY08525HatIPNcnymju5LJudfc947nuYDAksft6xSCvywJ2ymn4byazCvN%2bBlBaI2uNlcaYDRqtWsm40xKyTFxM%2bjNs3Gih03AQbjUw3QW%2b/fC3v/1Tv//gE18pL/fXAffNt//4e3/ug9/132xe3nine5bIIk3XGO6GlmkhDLtlBynVSMi2L1MkTJQs%2b4ickQD3uwMHv3XbwVajgrsXYrOpftlk2LfzQwwbewo6XWA7PcRpY19aanezwjE35qbCJxtvO3mEQXhZdpPccjbGj/CgcUlkDMGYbPqOuMMknR3sD1IcbjaUeHQdhNMzPHB30VqewnOZVFvhbB6tkBv3EVcmMQ56TM6p4Ej2PLA3jXDUW6B7EmO5s8DptETpF3h22cF8c4nBVHXQjlcgPFWP5uWmas9bpz0cRFNcWTRRPu%2bif7rEsPKQ3aclUQNb83N8Kt3Czku30P2aXbR7DcQdF3EnRbPbkFLzUQXsbNG%2biV7moQC7eTaVGFLktqVTed4Ued6B719MYMrzLgJTdEMmnqILz59gnDrosuiPKTbE5Bt7tBvKTBPw8nX96SLCCEv00A5LjFkhzFTAXk2chr2njObcJMFKGfTaoQmuunET%2b0mpWmilAxdlL/wswYtl7vU0%2bm3ijtFUu0r1XFUOTTd0ZoJPVUKkLxHgXOzidkKc1pxjKIsZzS27v77wlc7RzlvG0YiJhVZ/bjcArNaqHusuzp0BnMkWHHqw%2byW8ZY4ZCV2RcTnw5sWqGFPD5GIkswxuoBtkshbcnFIyI5aRlqWRWV9lag8fObhxo8KDBw62uj6GU62zsMqAt7Oj3bwZZv7zz%2bZ4y2uac3L5hjLt125UAtKvXK2Uab%2bsfr%2brlidbQbad/rndJvppIoCZSaudvlq/aZJoiWY7ELaFKo8ocrHXcvBLH/Px4PESD28Bz/1ZIL3n4JZYf5C%2bBpxtIO766AcuutcCfN1bSrzYBfY6DtxOgGyW46NjBx//fIXKd7EbA9%2bdJQh2l5hResJTEfsa2QYBFkGwTRAzncEAgLWdGtciYg7qWsXl4YlEX45vJnh2Wy4yZ4xFcgnN8DHm0y46LSY3qzSFj4dSq6g7EicXNh2Z9bjsrQC6JiQ6SCh1MSCfn%2bZnCdS5QWCIm7p1etjbS1lVABTwo0WTmP%2bhW3G7DEIA%2bWac4bgaY8/tYDD3pfqyMOpxhhNngn10cYgxdtHB%2baKBXsxZm0liDWy0M2mLp8o4RDNqEmknqtM3AVB59gSLDZd2ggraZQ4kYGe4vqjwysMCv%2ba3MckdPH%2b1RH9eyjx0uHBw64GLk4Mc54scs0mJfFHBn%2bZYDHy4nQrVvQZcRjVY3IXj67qppCP9WaVa5UsZOwv%2b4rct8I73VLi2RTME2uSSoVZJUZ01I2Dhv3v0lTc1CGzRKCb215l1OxtYWcQFfX%2bNpefYYx0DSmHSIsIsU/s%2bcaMRbb1uFLrcHBlQ/uXA52oGqp0/jiMsjD0JWfc4jjGn1osuHyzWZKJPmdeDR%2bcZGX%2bcWzso8iE8fwNFPhLQnmXncFw6ME1EQsONRtNnImtHfup1uZinbTS8iTDwBOUi02zGMs45r9L/nY40zF8hGJ7RA77VEqtfHjOG6F0XrSiUBEoejMaEQUMSTsmw82gSjC6JKzg3nmHqdBHHIaLiRNh5HgTttJXktTGp1Uz5GM89tGtAnsCeoN3O/xNjMdkIKEuxUjpTGZdV2tdkt973l6mZYus4cGmRtcckvcoawXo2hj8RFt94ymsbaNElvkZAz89RTrdMtRpru6VSoNftmI0cVKRFKNFpauHDFRtv1gLX0cJL6p5XaWIqc0UWc1lDKB/ltQnxmpALpx2qAtTcdXB26mK6SJHlDQwnOYa3Stw%2baiFulfAohL87oQWMQbk%2b6L726mL8sbde/8XvYmKq7avUuT9O//1f9oPwZuFW6GeJTO8XrpcEAesquCSEjAbenIDnnWQFvAbg3yV5BdzqxiD/Nh4keFenwu%2bS/apFMPb2Qhw9THB5O0RW6Tq0Glw234Xz1mUPxbKUQoGSt10rJ7Re7bVNNjdURsRjeH5RGiOAPVOiYOsaI61qoSyzsMnleWvh4/PHFZp/DuhR/tP0sLjqYfljP/7dVTf89Esf%2bQ%2b%2bInKZ1wH3va/5yRd/5zf/2oceL/HOxlGC8bxAkrFsuyagMozPQSi6Vf7HJId5A747wvksFKARNugZWuBfveqgHwHbgYNhpyFJCpgcAf09bf/xIdCnfl29nHF%2biKq3D4yOAFo0jg7h9NWqkcfp4TEuXd7DwVyrZF4dZni8EUrLRQ8KpFf1qYYPc2RXfUxPB1h2dtGdncr1zrs7SE6JikpcmjTxuDdfLZAcXJS8zHeXaFLqsrNEcxDJjvYgnkm4Ohp0UNH/qXSQbY8RnnblwrkjfhgtcG2husHDaK5mEAUQbrbQOqGJLAxwD7C1HClw/9wtbL5jF%2b2NBuKuAnef4dVnXdB1crfN8tksYBKJtV7EzEaWsvcI4LkokX0ncJ%2bAYN33ybjraCEIj50uvGCMGeU34rGu7Wj13vydzc7XyUw/mUSj8V/NfpT/0SIsdFYAXpdoDcuaQJ5ckyS8LmuJbTXZznooK4MoBV1MSXUrd7HXVQ9N8UuaYVekP0wkpg8X5S28d3qw25LtzaCLtBzL1xRpF0GDsTtmceqPydQTLbvY7tnaTnYw1yYF/vo0bfuECct06mBSKlmqezLznwAAIABJREFUaIRO3seA%2bud0E95khvMOs%2bRLNMo%2b0lGqYFwKL%2bk1eLMSKSvXlVp4iTIblczohmAydhEGJRqed4F1N3O1sEhSQ2HcQHMzFQb%2b%2bvUKjw50YmNEyRCTOH4R2P6cDj1ZW8wicfIC0HtF%2b4PMd2Tbr1aYnoYIu8mFxcQyEbstWjwWMmF1N0sMjl2VygiIp087pTIF2IV7ZNwj%2buADP/9zDZxww5kssLvXwieORqiOHTgMwzJ60ckRvdhAN3IReT7a%2bz6%2b9k0Fvoq5MW0XN2LgcQJ8%2bJSsdIF7D13s9Rx8SzpFw4nR2pkhZTGbGvsu92U07tLnjYUtpTKiXbXI2LD18ujrwF0cW3j9pSRis2%2bKI9NMm1Cs3WSR1zLePCZZF3H0UP3mV7OWaVzOG/UCR/bvpihSv%2bXitBogWm6KTzafo9VS0iXpnO0k0TQ9M/nzxxjjElTLLha5ZM2bKQYLTQLrxrTO0E49kdfIgFNT4iJtDDEb7wj7zpsbHC2xuUfP9fqFm/5hymmIj7t91uKMo5rqjTblMWvQTpadvv/HYwe3MuDVPMR5Bty8AlwvSumLJ3MH9w5dfOqTS2zvUG9aYjmpEM5yzEcNONy5F311jmHbiR7NQXE/lWfhXW0gv7NEtR3AySN87Z8p8Ze%2bYYH2ZozYyzGYuojJZBpgZgF6RxLjK4wTHx0D3E2ARCv3Ms/oKT71q9wcAvuSTOJFlpRc5CwZYaPVl3mSmndLINgW5XZMGfcIZwuNcKzjI69v99UrNdcR2Y9LPQIF8jqH0VWD8/gCmduHJ8Xy%2bnDSc7SaHZlfKWP8f2h702DLsvQ6aJ15uvObMt/LrBwqa64u9SS1xpY72moRCluyFKEgZJAIjAhDhH%2bAEUgyEfxwEGDCoEAtgywbBAiMLCMICQhNdg%2bW3G61uqvVXd1dXVWZlS/Hl29%2bdzjnnntmWN/e576bWVWCcLhPDe%2b9O55hn2%2bvvb71rY8/O84Yhj1AWU5EtlMQ1Jt9%2bLRRLTmWVMyvqjFMaeY0gxsEmMZkjGfwSYZp%2b8hz4E6m08BCN2%2bijK7texBSh8Q4yQpJuScbBL4L31Gadm6doEGysITUEDZsfgQE69qBR50Fc6F84sXusjlRgJ5vF0cpVby6cks99oc40iyfV8Ge1zrUwJ3Xid1hl6x4ew%2bszAftffGYBl9nYOkXT6DZbq17Df9ugX67D6HPZkzKBYfx/r1AO98rMpelM9b55y93S%2byLicuYtVVEVdZ0l1aQjHGc1znHMEtMbXtZN4pVJug0DSzo3pPmklO/dc8UWe%2bdw450bjYIrXZj5aggc5dSnD%2bqXv/VV56%2b%2bTdW2eMf/um/v/WlOz/x%2bZ5pX%2bOqXnqQEPxqd7oWaK51bZzEyv%2bXp3nIxYzIj%2bjvrgC7dY8OharJpm/W%2bHJh4Ts6Df4kN/DtN1188fkc77vlyr3z9Sv5Ut/%2b4hsmDr6T%2bu3q3E6VYJtyyi1DGPFeB9IttY3/Yuso0mxF4gy1hp1/83WtuwzVJpz3RjsNckr7KuCZmi5SDE8Nvt5UeMmy0JQm9sMEXlAh3YywfcFGvmPhfW9%2b8Wc//8df%2bd1vGXD/yE/89ta/%2b1Mf%2bgeXR9sf73UyHI8LcboQ0C7gna4WBBgmpjPVmEbY%2bNJAlacwbQNkEQ9jB595O8OIF5/OEjtsW3ikztBwC9W9OawrPqr7C9i9CfbMTdBUhfHwQiSqYwl87GDKAXm5Y2EvrbFDsL5m49K4wP7Ig8cC084I9nwsP2nfONgYinb9wmGFw4suutmxfNZJ6smA2p4r0N45DpGuL9A/9nE7jHEj62A3SNT8LQFRafk5tPxTxXTd92NcTnUlvX4N30Bryn1X2YA9lYd4aM9lIBC4B2xMwJbadxuRyty8a%2bCpvV0UloPhd6yj27VFzxn1c8yn9HGvEPZZye%2biE%2bQI/AZsYeEy3QsTaZFI2jfylP3X6i3NJkWhzX1Vba7Jys219RWr67nx71ZbLm23Ndv%2bjqJPaiJzVqYrz1/X7CEtJ6BmdSasPFfvXZHouE4Pi2ymLStXdmkJHdTeqCgst4nIBvioJOHagtNVmW7LFsub1HG2zjn8nV1PlzZgdheLkhadqsCHI2iSWOizgVJiocefBO2dSh5vu6T1Q237uNwvvYvaf/e886TafZEzdBjoFRAmSzQrqF1PJBgQXJ10CmzNLCRhB1lVw16UAtzb9BzP8xEnIC4uSCRaFubJudZdLCnZTdU1ccRC1Xdh3fcemLh6rcb9BwYuX2rwcM/ElSs1Ht43ZL9OXgDWv6FwS2VCgP39e%2br8X768wrDz/fz7tomdyzV275h46illrdWOLE5aXDhudSzFMjAN2a%2bRNAH8mh1QTWHjg44jbByDHSGAF5gIIuC3ftPFwW4FK2SbauBrexWMuwFMdo51T1CHEcLnDJhBjU5oIjRtPP1MhSvbNp5aN3Hda/DMuoM7eY1PnwKv36lx/wC41AN%2bYD7DU%2bsdVMEUaWNLkG4hFScn0SnrRdiy4Gu1QvHxobocnqw/ibrKPrEf1cqlSL%2b2LXCdJCa8jtKo80yfy8JWUsGNeS6L0W3KZaHKRata58sY5rhShbKawuEn8jyyfkSeU/fNCpbQpfL8XrL0HsrwCE66jlGU4VQY9RynsQLzEzYPIHD31NmZpq4A%2b2X40HHuHaBVL8oJrni/SnZDn1cp7GSXTMNXnUBZZ2ECkdNgcWLi/57l%2bIbVQ1TXuLoDvBA0mM8b6Wtw/7DGZz5XYcEi1DUTyVkDa1YpPft4IdKY6lENc2uI6m4G67Kr3JIe5PK79BhgFu8e4F%2by8O//Bw2uPWVIM7%2bzubL3UkWNqkESPbtJpFHrLnkODeQUwCSYZ62QdtjSNp6t3ErpvbUkrLZgsE7B0f7mK%2bOHQDT0Gmnsw8tFS9s2w9eSG4Fj6wwRC1gX4kDT81gZ257Bd3Bpj49QvYiKvAxJ5j2mCfd8X7TvrYcQ78Ug6qNeNodiBnIgn0f2XeKp1Uq8VOD1bWaNTWlyx2Z3ApSjABMC92qGwDbhUgOPGmmcioxGNPUcjWWMtLCEhSd453nt%2bB5iacrUnkMl5SELzwWUZCJaAJzm6IS%2bGkkN5SELeb9IHlPKuljE6p2D8PQEtbv2mK1kOx9QF08mfwmM2/Fds2uxg2lSLoG7kq2040SN8ZbE4tWYJRU6kS4k1VIXMukhNeCsLzKB4/F5ncGq9IXP0SlHLfYpMeT3K5kQu6mu3s%2brfyh3GdoRn8/v7/Za4rGq6Ql5GNpT5OgpfTvrozRwJ8kpRA%2bb2pFx13IPAe701K8aJFmOt%2b8ZOL4F5PtjxIOLMJfAXV8g7Sxz1Nz81Vufev%2b/9WTo3Pno/qeHvd7HytzAJGWNiYWT2Yo%2bUzvqtCOcWbxhZOMsKTUZJQ124NyvcbfvC4ifTzPcuOcIYfzNgKn2Bh8qQrzqpng57uDrVqaKqVDi%2bUmAN3YWiEYqbUbyjOdAssE5EG0ZQriwoRIXM5I1JhjXtdQiGTxR2ds1TUipui5m74DNSxXS0sRzlYW8NOBdKmQBRCItuUc1PjC8UuDmWYFg1KAcheh7JvxXbLz4jS/87Of%2b2WvfOuDOi/E//8GDf3K4vv3K93nFxiTOscgNuI6FeZbDsW3pyiXpGHZgsxvk1QBVPsesIPMO0SpxQH3hPg31S8U0FsCjgYedkwqNUct/bSUgOSubeluHIHwT9uQEWWcoDZA2iw72Rg4unhZ4NHIVM28C4aMa9yiJoavGWYl9fyza8zTYQC89wjxaQ5QdojcZYddLcTEJcNRXDAW9TsMzUmbAYj0V2YtKP3NB0iA87uJ%2bOMfOIlSTpQHshQkuF6qy7aHDFtFqtUs2aLsIsHesKrvbqdUsDdQXM6zPfRRkjNgA4b6BZGzhQVhh87MPUboOkrjC6H0jXH2ZFf0NgmEBv28j7BXY8i2URoOBV4ktJB07PMuXyci2E9EMLqfyNs%2b3jPvqNldg/DEEvAQg7cQkTKDYxxkSoDtujDjvCNjl57ea1TKPYTvREkKrSV8x8RKMdYpUFj0r/rltwDkPQY2W%2bNDNXGlcmAVoN2YAlnpAeZBpqS5sR7HrfD0/kwsOyR7ohYDAepE3GOhGOgfQah69EAmNVulJrR1jnkw7tt/fZi2kKFVb%2bZFpZTGhaCi1Swk911moWCTrsBfK3YfvpTY08buovSM0J0PRrYvVGbuE6kJUN6lxFJhiIZWlusFZ28OADP3ElIJWWq2uat1lhGlJDAtJn7pKsK4KSgneOf1cu9rg3h21KLp0pcGDu%2bpIJ88qPXubmb10ucGduyYubuvcib5AAt707wLa6xoXOy6Kgs0uGtgDVwW92kSEhQA6r2OjYRdVcZkBbBfo%2b%2bw/0OCT/6iG%2bcjEpXGDbs/C5w8mMF1mjho0mQGT3TDDEHZYoPuijV7HwaODCjcue9i5XOCZCxY%2bdMnEjgtEXVPi9P92BPzO52oUtoFLIfCDyRTX1iN4wwRnTAlLO3nFonD8ynWU06BAW0vA8SH1%2b/nCUq4hx9FcLQDbgrBWsrSq95b7Y2W5qjTtyledGxl%2b4ce1Zr5NYrWAvI0YbWH1eQTRQEeyJ4pp576ezh2sdXKM596SLZ%2bKLKZU3siseuYezaZoul30vEKIj6l%2bnH9zAE32F%2bhd8JUXsp6XJ1qK0PdLuYbtJs7j%2bQDd3lgkU5L293W/SjKojo%2bOW8MzG7g18KmvmvjNgY8e5Rqo8SPPsDhRNei7yTqjB5bSsyc1mnkDv2egnrAIVevZyYtw7n3Afa1h7Tio7qsAIXLqHQvNa6W4I1gbwM//TRMvX2NLd0McazjTtjIo2iPy/PDyEshJFrwl4nWcMrwIQTmTAkoWOlOK17LwfINkV/g%2bDZrJmlatVqgtdvRszAtVGLd6/5zHPjVOWuBuG5SOqKzfWeoidBhnSYK1HvDnI1MtGc9TB6SyIjdHnDlKPqoDLotWpS60YqM8doUB7GqMwuhLTRF1xMyG1NUYSTYU73dq4Ok%2bw5NiWUMV22VeOY8ToaWamgV2okAQr2UVYdCtkcRzAe9qWjYxT5IV%2bQxwMrbB97thiIAVkpL9UrIZVY/C3vAnQLQBY36MGD1p/IRgA838CE2gpDIqG8uM20J08upyGAhcxfbRxlcaPaWUoKj5bulIowdyPFcrdj6uxrAC6YrZVvIzXlt%2bcqKdoNgpmdaN/BY%2bx/v3UBhbfneFTkAXmFrq/WRoiT0tveapa1cdT5XJgSq0lWWikCLqHK9ABvmbmveuHIcpPymVeTImtABfWHvisLxAVnX03EIwnggJsArcpa4mheAJ1T21Rlx6iMeqGzCP8M3bDU7fqnHW9VGfWHDuTGB8cAS8NUHFbLChagYelV/6uTuf/dh/cR4h1G/PfPy1/35svfyxi/7i2smZ%2blxuo4728heratWkS%2bRDPBetbS0XF7caVC9bsN5WkhnHqbF424MTAoFp4iujE%2bCr6%2bpDGxM3nnsbFYdSVqJz4RqqtER%2bWTWxpLbv3p4Hw9YF1mWNaNvCqFeLbp0xnXPY2gDIacNGsot2jzUw7KmsMa/l%2buUKRW7iGUqdc1UfwNgYPZWJpTNfo5uKy3HReCK/7eFkEIM14d0bEfofsfGHP/lbP/fcS4df/sqn/p1//OR5%2bxf5%2b12X9//Vb7z9d%2bro2se%2b41m8mBws5CAXJUG7iTxdoDS6smKhBKMqFijqBdfCIl/hQCIj19QF/vieA6MqUdY21qMavC3zzpoA8rwzhBOfoBMPMeufKauwkyGqEc%2beEiWW0Qbc6RHyaCQPeaQh6aTRGWJ6egbXVsOffu/d8RqSwYn4ffMmOUmE6pfXR%2bs9pGcTRKchFptzxPc6qDYUI3110cWDcAafshc9iB6FczyVhqBWi5%2bxH6Sw9/h5isXZGqnC1cMzMvKqOQVvktUBKUUMpYnqYobRgpp6wJgtcLbbwZ5XoD70sX7nrsgxhh9Yw2Boi843HOaiie72A3RGOeraxsURO9iSzfLRsIpfUrnsikZ0oFk6sfbqYVGpZhsCblkYSiDuRUjyRJWn6jmAwJYgvdcpURc9zFkRZhjoUbur5wgy1aETY5Z3hKkusg5sdyqvNx3V7El/leqISsvD7BwURTp9mKgsqZLqLEGTWii1z/W8c/DOz5LiUjoKaEAfeUw/v7PAtgVTEtjFh53HyGYhqgpRCoAKSp3kFeqeb1URj1EY6nxRUvFYASPta%2bXiqW6LBPCUfxC8E7jzHzLudP5ZAnd%2bTsF%2bBg2yaSGF%2bWKhxhVsoYpRraTCcWAK616WFtKYkhqtZ9fe8fHEgu1QVpArK8ilbaC67C0rxHvuwX0N4h/SPEsFq6cuN3hwX01j7e88/m3tHkPuq9Wzz%2bkeM8we13jSIaausRlZAtiywEFZNeg4Btw60xIbFYG5qKS%2bnSwf739m6ULbwlanwa//Ixd3H%2bQ4fa0CNlU3NOUlxbSG3Bgwaefc76A%2bKOC834AT0dbQRMdypMX11Us1PnLVwAUHuDAwZdF2lAOfPgNev1tjdw9YeCZ%2bBjU22PAjmon%2bnQCeLcAtTDCbDtDvj3VDMnXxxd0lqpFjABvsz6CoOaVtV%2bO2tZNsx9rSDkyP//Y%2bUONNzyvawo4FnQTzamF83j79HTKY1vZNd4c%2bNCZw0zUM/Bx7mC0lMaTqJ6mLtU6BQ8RwkhGG0ULAH2NoEZxigxr2zBE98cBTPqhk3Ll%2bpzSGbLzcB8Loa%2bRuUI5jS8Eq7QzpT80L27KfiomnKwldTejSr3jdvlOiYzR4ODHwetbgD%2b9ZaDY8PHupxgcDFvBSWtfg7UPg1kMTr35hgdE6F6Y1yqSBGxeYT2wYZwlgrcGIGtS0FFLtrcX5yNx2UN3NYV91UZUV6qMGRhPgI3%2b%2bxse/p8QrzwCPzjQS0Hd5XFI%2bYWA9VMYBvOupf47Cc2eSVv7Ssdm8XNVKyFGv%2bns/oXlWDirUyBP0tasb7qgCJBwr3ATsL7NWZNdZpNoTwDQgcGTsyzJ0yLbT8nORIxLmXRf0Zxm6biiZ5zhLpUN2G1nbsROIiP1xxxlaRfKz2d2aW2UPkKaqfouSFysfo7CGsKoxSmMgHWLLYoK46KMXkFA5g2WN4FoxFkUHPn9WkcQTcaCR4lutBac1pVhHzhF01M9Qr3JUJkOdHyEKpNhUA3etdxfQzhhPGY2%2bb4ShT5Vmn%2bw6P6eenwLBCKD7W7ChBq4G7g0f8zY0WFfXlgWcBOlRWGOa2I9p4HkPtm4yodcCd1N3h1cNqfjp4jfvV9LQSeYsaqj1%2bGibJ7VNno7G7H2i2P2AAV0aSKkCcoly7FOhterCsVO6QR2%2b9m9ul2V8v6qrUgRUuz3JtCucYUkNQdF0VVFq0xVCVT1niCV2a9TQ4rKceI0F6onSt6dTW1bhxTzDwlRFm%2bnYxzf2axgTF0y0G7dm4iwjwP1yB%2b%2b/ZuH3PvdHP3fns9//DuB%2b9c995mcz7/v/ar/JrsULJd/hKaO7zGmsutg/FgOJF282aF4yYN5qxMZYNoYnWljedBFEDW4fZpCJsLTx/Av3xUqtyQ2wGbG/uYMiq1BdMmB2mA4G%2bpmBtO%2bis7ZAeuojjefoJSYOpKmYWqC1XdyrBbATsBmmKlwIwxrxmodnap4rMvImeN78rUL1KeFl07USAlMJ7q83cB/WyHYsnNwxxbVpd7KAzez8d0fof8jG8PPJJ%2b%2b%2b8dlXP/8bf/HXzq/sv/hv7wrc/9P/7tW//dFvf/ED/W3v43tvLbAoSllRilY3tkQrRUDFItSqXGCWu%2bKCwYwYGXemQKoqw1d3DSzKEpPCwxYLvAYTdCZ9xN0JOrMepps27OwU1tlA4cnhGMaZakkuA7ACDrwxBmtD%2bHsNDnwF3C/mAxwGY/iHA9mnR725jJDtSYi9/hw7kxAHg1R8wKOjEAktG09CkNbnwvgwVc6g2doULiUwTAisT%2bCc9FBvzOCd9HDgz2WQXSgCHJ5VKuXC87yTo3ngYntk4bPTKV5uItU2fLlxea04TbJZtPddHygq9eEZ0LlrY8/LUB76WLt3V1KLo1fW0F9zkM5KhEMHfrfAWr9C1CNL5KET5gJ6cwZKm1SUGn6mHQvbWRZKy01wOo1NAdkE13GeaNZc7RwHqwLrNSYzC13t9EOGut%2bpBeTLpBPVmMXm8vnzY1PHyc%2bIHMpitmFiDzAuIM4S5bKxUh%2byKs3h9WwBuRS/ikOEku20g/AxYKS/9MkBuhrQVgMbi0sHlMPMDXT9QI5d3itj6bzA871uFY6BVtPeLlzI0hJgltYETtPHbF4Lm6pkDUqbfkydsdnBLHMFNHnFCEY8xbhbIKjWkBU17LTBeO0Ma6cjzIhHFgWcjoljBgHeMxweliVdVDmez84srK1VOBym6N7rwHLZhIsWkW1WRx3FY1pHsfI3QOUfmXcy8A/umTi70eDlRYMHWlJz94GJ7W3tcsI08ImHcJBJTUbbQbUdzZS/UBw7zDNkHhvckF1VGY0hCxvFk1xN4mVRI%2bw50jV1jQYUBDG2iRtbBv70j0z8ydcr3Pp9dsAzhU2Rubcw0VypYDhzNLEBawuoaOnXD2F3ClS%2bCaML2KGJ6zseti9X2BgZeO6ijafDBtuhgblrYr%2bx8LVxhW8%2bKHGLzH5o4HlngY%2bYLurOFJkUsLbAjg7jfVjGRIqdeT1l1LaLVbLshnJQaWUkki2hxvy9JDZ6sm8bnMk9RD24/sxV4N8uH9tzLLWT%2bkJyrB1ggm2jLyB6EHLh3k417chlTQ2EQTcmUwwv%2bDgVlnGZ6xO2Hd2OgHCCdJGPxez%2bpCwAeVlHfC6hXKbAydyRv/WlXNrZ1cUAjXOG0O/r%2boEJPC9CaJaSmid5Mz4y8dWmwu%2bmHfTrGs9earARGbhhN9IZMc8bvLlX4eFDG7fu50oaMzKRjBvYSYF0ZqF5EMDsURqzkA6JUvugC4eZ4TEv2KphH2PIV0sYlyL8lX%2bzxFOXc6xtsA6plpqauKhFvieMsZb4BIYlcYc66GShkEQUqAyAfB7XeGTltERPbCA9XdxMs4p3CRhkd6NQyWWEfc4mCDxKTqTVqbyjZd1VcapynGEkEsZ1udLTRAKtPn1acipgM1l4sC1q4enS05b4rSwPhflXBappmkrcb%2bkbyX4SQIYh5mSn3QUqbSmZzlPpiKq6kZMxPkOcDmWRURVnMCzKaKhvn8i9HdL6qmmwKNlGkyeIWQNDwDx3lsWrvW6lmzSZAuLbIlbuBwtZWbgq%2bnvflcUJs5H8jk7gCkCXrINIDNUtqIp/VaZLWTVSWuKqe5EnR8D7%2bhLEy8ul2dPasmKajDpdaBTgVsy7XGc2a1qoKMfdIIPO76Qri%2bjAtTNMx6cTyfm1UfugOuS22CTNtBOZHh/SHbjt2iqfeW7Z2spe%2bIl0z%2bF3MzOgmHWVIeAymAsFmRO1rv0JXmkZ8GmzKQYh2nFGnGSY1RVgbL4r487jO4lVQSWZZpYexLSDnNY4mefIcw%2bLeIHp2MfrezXsiQ03NGCwwpzZoJszGJaFD393B3/0hV/4xFc%2b9TPvYI7f//H/8gfuhH/9Vy5m%2bTUuKpRtptLxL2WKmq8hEDNuKobdfqvC7VGA67M5mta3mTKZmw68Dh0VTbxxv8ZzF12kwV1YqYHdtRGMQYEbXlfmHsrmLNau9RpcYsdSjvHChL1RoRkbiOMAXa5YuLDiMJrqzo6XHXBIXDPVWODMyHodYdLJqJcGop0CizmwfoW1O%2bqCW3aNw7fVGFm7YoCGM/tk609zHJY%2bdpMFQvbBeV%2bIyx91EPze4ScfPfyjV//kN3/8Wwfcf%2bznX/uPOtcufOfP/fj6j978aqK6d9qKvW0rlMfTTMB6XDjwHJ6oGGltCAtZlJYMqq/uWjiS1RGw1TNQdqcwThVIrwdj2GcDHIZjXMgGAtDTYA1Xx0r20p8OMeudwmxMXFwMsB%2bcYjDewGx0gnBKwN5g15uDw35nGmK/k8qJvxAHOOyR9mhEw55sJuidRrgbTHE97%2bCuHyM87SHfmMI/oUcuC0vn4gBTjGZwJ10cnVSwL2uq95EHXFkAe54Ao41xhuPnAGPPleISsbLQ6JI/3jIX%2bL6phbfyEIO1Qhx5RvQtNYG9MyDatbEXZCgOA2zeuyfnbPTyGnrrDvKkRLTmIOgVsLouLvZow2dhc62SwEaAx%2bY37QQb2REM7SgzTRRw5U/Rcbd6bg3GZRdXNCsE7wqoK91Jx50gzrUHNbFT1GBKq0TZlpyAnGOy9WReeI6rgvZ4e0CzDdOhV3H7Ht4A6sSo724Q2YY41iyRupbyyGtWurmqEH4O2RVbriak803cixXzrB%2bUCZwpRjdEXLBW4V08n95lIpYb8YnuqAKwdIGiBB0JikqfKfFIenAp3pjWZkXnBF66JvU7ZjxF7PdBD4SsUKBbFlXhEdzjEUyrEjaCwJ3aO95TZFDyuMT%2bKMWlqZJoJexxwABnNzhgx1RdEP5kelX%2btoC9OxauXqnx9cjA6CaZdS2juVILcD%2b9DryUNIJr7t21cOmKYomINb4YWfj2mDK2tjOjmjg3O%2bdsuzvNYA1dTBJan6pGMpJ25UTQdVHllTQRY4KFQYvNoXZ2LHzzK8DtRw7%2b8O%2bxuAKw2hq4zERztaSZuQLvWQOb5lIToO6G6L3PQMpigE6Dl5%2blrha4crnE2tDCSz3g8sDAwDOQ2CYeNRZ%2b72aJ8bzC7kMTV/meMMXLCwt15MIMYxTUO7M4C13YmMo5jicDdAdnmI2H6PbHcmG5MBPgrscKrzczLO8J3JeA43ws8rwqmYy2D13JyCnrxRVt2MqY5LibLlwE/UMkk0309evoGhP0juGXPZF%2bDCmX0cz5KMpxup9juKnYW4J1erO3z4s8ZzoDBl1UpxMMNoMlaFd3mk4nLwaovTPUiyF6/TGmiwZVNkAnmkjc8b2OgAzHbGBUJmzKvaY2fsc1cLwwcGMHWOsYeIZdUAFTyJdBAAAgAElEQVTcOa6Rmya%2b9jVg90GGRVKimAL%2bwEA9rlRH1Ic%2bjD5Z9hwGi%2bB0Vp0fUBcNjMsWvusbHv750xmooMBD4H3f7%2bMH/1KO7Q0TA7KquYl8BszsEv3MQd1TWQSOS2Z9OAkHfqHAnDDqCiQxki5Zd0eDeS5stIe7lr8/VvgoLh7lBL7Vh8vjFPbNwDyLEbidFRa%2blZutxlCSXcz0GsjKLjxrhkXZh21O4TuqTWtKN46mB9tQj72ry4%2beAFQ00q5a54nX89qUxkDoZCiMHpxqjLjwpag1sM8wyyjsZRZ0ovCo1rrzsYrdWrMRIo4FaoWtroyRkub6ZPPtAVwzxryIxI3olMwtDAx6NRa6JTH3m0WsdEVr56vlvmomnuee7DBj49nMxLBbomITp3qCRKpkVAxiJ9bzJVS7%2bNFRn6CdLLxis5ZEAvPgIpVhcykt/Xt8VjlfQCk3MMp7VZGv71XwXDLa1bKGqp17iBdaUw7W/fFLfXZ2Jc7RC3gC%2bDnlj3o1zfmDmns64zD7w0tFhxgCdy4meX%2bqLI%2bKOKudUd9tuuK%2bns1DabbEpdSCbHsyQxCFcj6zZC5EEIknFuJzfqEBUdEwowIxD%2bE9kVQOFlPGiwxF5iKJFzg7DdAkGd68FyLsAObbU3ZGUhPkdoTPH9q77zd/4a%2b%2bG3Cns8zXT/69X3xuY/GxcW3DEsZCFQGI5FBNmtJcyXyboN2A8RYXOI3ElFLIUVM1X6Ki400XTtjAov5k9Cbw8CWU0W1sDK7iq4NTdhHD08EABZve9SuMezWudkyUlAQxiXOhgUk8QmXGlE51AaJxCjsA8okJ84qLIqtxmXVIql5WI50aZWEi3C6Rs1N2DlzxC0zWXGzr2/mQ0ppd1b9hdK3Bmq51iA9zHBS%2bOMrc91LU6xGufZ8D53cPP/no0bcYuL/yI7/3Uz/yb3/iL/3oh/CjezfnMsik4ZEe4BTqF/lCBkRS0JPZRGUmWKSWpMh50lid/%2bpteh9bmMXsumnCd0wc%2bGfojUeYDE4xHI9UenEwRm/M1b5ams36Y3RnA7nm894Yh6kvhQZK7WBic%2b5hVvASG8phpAHStRSdIzZCUkWnfDOBHNmp%2b34C/7QvoKTamCxlMRtNgq9FFi4Xvi6UUdXG1Ks7LHCUGU/JbdbjDMcDT1KkYnBgNtiMMxx1HfmO8YmFoQbY4zMHB1sTbB70EPVK9DsqIMyY5n3Nw/0gAyiVuXcfdIVff/8IvaEtms/%2bmgm/V6LJK7CRLHwbXkCAotjWVauyltVp9dxkgkTb2cpRCMAJ5mmZ5YWIs7nSdycq0PJfAvYk78t71HOUy6gFgEr7U09JZ5rzxjKhHSBepOiKBl755lIPPyWLT1BPMjVTjjZqtdCgzLsisznfFPfYan75Xn4GC5bUa1kkpVKGVU7NPYsE9XKXAJpyHZdd4lQhWMtaLrM1Gly/B05fPiwEgLAcmhUQPaJyYKAtJYNNZdJFpq/cQ55gRy8ZfRxbE/jpmtqH2RSzqC%2bNIzg%2bS%2b8QxtEIi8AUYGqayh6ML81NBxNaPrrAfFYtrR857o4Gc4T3usifniG821m6EBzMimUhr3zOytpEZJZaQqPYA3VeHt4xcfVqLey6N1A2XctNU4qUyq6CdqsfYlRm2DdcrBUsYmwwD9h4Cdj0MkxrOomoAmXPYtGVcgTgKVKlQgANTDo9C7UFpAclfuV/sTH/Mmd0wKKSiTuYWWiuFTwZFGCqn%2bYUFouD%2bj6CXoUismF3DXGY6bqOkAhbr9j4zs0Kz/YMbLvUUZpoHOCfpmg%2bd7MxDmcV3t5TAP7H6wZ9q0B3awH2OiEDX4CuQFOxSyMAYovuSWqKIxJBujyqkTtZrHZri7qfHFc8Fy3jvlr4zWNcFpYyThwuhCVXRQQGzhJPQHo63RSGXDbpfeCiF7bgXnnXcBtrVpAMOeUxyyyVlr4sH%2beXzmYwaaOwTCkoCzb5avFlVxq26VEXVWch38/7T5eu6IyD0n07doiuXSIk0XHPwO9XJc6mBh5GEZ671ODDkWowRRex%2b5MGt08gVo8n%2bxVuvZ6ie8FEGTcwybKftSx7g2o/E/cKg5ZzGrQTsMsA2rbwkTddfOFqDtDX4AjovAD8Jz9TYXCxI23aqUcn097XRcgC3lZocrGLpKuVoWoelIxC2RGuxlKeF%2bU4o9lyfSEIXKnnX7qKiIxKXQv20lAEBuX2M%2bRFVzpCn3%2b9BceaICv60uk0k%2bZcapNCS5cuTRPxd%2b%2bx8E5IANZtqf2gA9CT3VvPaZHzheW7xbg2UxPaGfygJxkJp5nJzVlYSl6RZH2lh7dG6LhjzCVxbSAMFYBJKUXwGbO6iJMJooi2x43qM1CfIQiGujBVHRFBaWDHSKu%2b2EKzBsZjN9Y4QdDpApmK/%2bOsq0E67/8YVtDHnK%2bJIrWQkldpmU1tIGwmiFmAKc%2bIaTPCZoqGzHsLt1oZTXIEI6L7DJl%2bAyEbUj1G%2bLzzbCnQbmO%2byCQ7zhjH2iIGUykg1WsEvo4SHALiLM9ljuSHb63bMp5iKYrmuFBfKAz4ytct67ZaXTdq3UlWHQWxBRcGq%2bx0PC/QkdR1g3nK3x15Psv0PEAbaurbCZaEYFILoTydi5SZ%2byxFnnPAdU2UjXIF43g/HjuYxQs5qwsC92mGkxMf9TzDW/cjdLo1TIL2W1PgehfWowz/3Il2P2D91495uLeHyEZMX3jrY79uub2rruNdm8Q1Nh1lyXVsdmQumhzUeGY2x1trEW5M56gsZX375jDCc5MEbw4iXB%2bnaFyIo1T89UAMTziJNL03sDF6Dl/rH%2bEF1mMwdo9KlPMaZ/0aN7o2FjOguViiovV16yHiAuN7wE4WwoyA12%2blOPFDbCVzGFddXC1N2BcKTO47eLMo8SxYsAs4F0qMLgFbqmxG7kWOSu4vh8eRWePgTQvrTzdY0zLIUxsY328QwcJekOCREeKjf9lH87/vf/LRw899axn3ax/5uz/wH/71D37iEz/%2b4Z/5xmcnyOpCwDhXRWnpIa8yrT/zUdQNZnkMT6QyFjJd5Mtgd3Zq4bCucXRKf2KycypPsjqYZ70x/P2RuLxc8Bc4XPjYnoY46KXYmgQ47i3QPfYx20pwcRopWQyD3iSQz5mvp%2bgcB4K2yKY/nXZxL5gJcLePqW3lClmhmY1mhhOHrJEuOA0ybL0BnPaJOHSgMIHtNVb%2bGyjup5j0PMk4tJzz2jTDuOdgembjaGuGC0ddsYigWw2zAwRrbWc1BmfaCHV66rPZCTS8beNBkMHY87HxYBeZ42Ee1xh92whrWy5OOiY2kgZ2v8CoW4tcZrRuoedWYkNEGeQyEOkgJ7o%2bl8WXSsfOIDCgW8oSfKvAqoIeN2qEFcOursW7JYRXCXpleddyJ1JU5EaYLRJ0vI50HBVym/cXi3PcEKbTNvg4j1xiJUdZjzcVq0aLwDt20PG5MKA3trJxUt3RVKEwgTk1%2bm1mQYC6XpC1rPiTDPS7TWSrjy05MGFCdIBd8Wrn8%2bxAK81wRJ%2bsNO4t065GsYJSEzYi02xqEZzAy9cwNo7hlRsonRM0yZpYW8UJO6Gqsy0FtHBQRUdw4jWUeQWLxd/UuZuq2930xMZgo5JiZn5Pem2G4G4XxY0ZfAJ5EzictYVPith4eLHClSMLt%2b9YuHLtvEkJw/6rgYkPJPVSDtOeD57pZSJGF99tRTaODFuA%2b4GlgLsUZPbrc%2bCnhw3T7lKYWqvmGS1w59NMyRL0bvcMpA0weQT8t7/kormbiY6RQVRq6wpq/w00TxcwyMJntBaYwvCGqCcNjEspnF6FquPAGhjSjbXr2hhQ%2b/5Ug2c3gIsdAy9GwDA0Ra532gCfngL/5I0ad/aU3clTQYMfyxtc7Fcwoli6dU6TrjCwDReZIgXgYqeGmQ0AbwzonwQhg6DGOKPM7p1bC9yZUVI1NnRzUXZ/7TWXuEPwnupKNt6nZOv0NTib2%2biHOc7mLoahSulPmUoX6d3julc6xlDrLjfwZIrBlo9xootKxKZGMezmZAJ0e8pjveJdbDwhwTlHNQL2uIinXlvV3WNzjdXJM5RJF0dpij/ODbxq9OBWDZ7eqfFtV208SxqPWZxpg7Okwedft3B8v8Q0L6X4jTKocMNA/LUazUEAc9Cg3l8owM5UPPEO%2bRcOhrddNB%2bu8cobNo4%2bYuLR3RS4VWPjgz6%2b8%2bUCH/8RExcGBvbHatTmZSV1Mr3SBjpKhrA6BgUCtsx7q5/hrFCP4bGAXF8hiU3MJupiNgLyWTaXWCbgXeKu%2bs4WyAl7ak5QakDORY8C%2bYzClQBcWgy2Ex5lI2245TUnZKGWnLsc2B5S9kdoFAhjtpLgihmXvArgWKpz6tnch2uNYZssev%2bzO7C22QQVr7lIMxDnHjr2HPR7l%2bJG3XlV2Hhbyd%2bCoBamMSk9eL4rxx%2bRSKkbidPtkiGwxyKvUc2dCOLbZxS/6huxONDQfU4dp4Go42NMmULTaOLHxNnUFv94Sm0I7hu3i4b2olpeROkCP5lyG5HXMJNAzZ50Vc0QhR6SeY4odLUMJRNZjCoUZSM1W9ju5YU4L/WSyzGnJWKeyWUKPJJztKwsxB2Ig5MNl1rnM85J1L87bEKZZZINoCyjLVBXRa/qnpqR8BQCgNKqc0pXNVNSmIIbF5Ot3/xjxagrWhlmehQpVeGMzLE7xaJSmRB%2bju/MRCbLTRpm6nkkVbXoIgXKchOzBYk8atYtmEyJ1g1OZhmSxEXuNNh/iwWNGW7ejxDR1pigeTeGdbWLW4f5blPFdz7y7Kd/4r0aCVHnnhbP/%2bD65bWP7T/kgrzGbJ/mGiaemad4axDi%2bqUMuw98hluRx9zsRnhmmqLkNbdUkXZFkpiJFkdpCc3ChLGwcHPtDDeMEax%2biTKtMek3uNazkNOadqNCFEG07/2eI9eFY5zdjU8eNdhJIpFL7x6muL4Vyfi49yjBfM3Dt12qcNEuMBsqSShP6gYXSJTLrMAjjgP%2bR1mMrO20BPiCDexzjttrMH/kYutqjt2jAsc7Hl58IcClByefvHP7M99q4P73f%2bDn/%2bPv/cRLrzz3M4d3MmSLGRYMHuxmWDBYdBUTWidgb4ksteG6XAWqojTquvPKwvwYeJDn2E99bBKUicODOlhF5iqgK4ON%2bXup7gbS9VSBCQmASmYRnhKc8w%2b9mrWBcpriYLOCd9LHZhXjwO7gQh3j2CCw0StQSdUYKDemKF51EF0LsH9aYXNW4OQFA2tvAuMXaxgPPKzHCxz0VcHMaJpjTEnMgYetZIFbVYDRkGZK6sJNz8im6BlXNO5KN3%2b4EcN63cPGtoODvRyjDUfAe7dXSSrOv2XjgZ/Beujg0cDGc7fuI82BtQ%2buIznKsL4TIOxZcAcF1glWejY2XAuhT%2bCniiPI9KyyCIoNUhwrAXWcp%2bfykZWbX8cJPXmce0KvPt4uUB57rf5DtIpuqx9XjDmv5%2bMMvdoTMV3ghKELY/k7tfMS0BKlw6dUhzp7sgRt0OFrVPqZNQI9JGUs44CNKphDYxZFBcRzxNkGwPbnkm2W7zovMuRbmL2jDEIAu5bZtFKT1WMWwyDdJZUnc0BbvpWOqQeYYsfo48Q6g5%2bui76dxYScdGel0tQ7HMv9E5jzNWnjvgTuenXOKv/Mr6QxhjgPWLpIlfcF7ckupJi/GWGhQbtK02qZDovnn4kxec1XLjOqASz7sahNM4ftQHjsuqp5UG5CUTbxWungJAU5dY2tnoW7kxI7PVtqNeaBAzYK9OoMM4ToYK6uMSeuuhFbrMCq4KywkxLUpEufks51IuD4IfAP/rMK4xPuNGAwOcZ95rxKzft1su88OAuGPYERrqGhd3o1RjOI4A5ylB0LZghZMHQcE6PLjjQb%2bp6XbVykvnrdRGBCurdSXfFPJ8DNgwYH8wq37pvIHQs/3otxtaqx5lNPP8VJZiqPch2gWOT%2b5NZk9BUf64YqGsQ99qIG44WDIQG7LuYUiZWl7BeFzzSpL8%2bUjIWt4AmkvVzcYKj/7ZMFr8lK0jWmwIwMu2bSRO7S76IeT4F%2bHyAo73XPqdeVi8wFQHzSQ9NJlGykNKX5Dy87/d77nRzT4wjdUYIq6wEOdcu8F2kZWUstkN10cDRml8ICp14H9xcGnrvSYKdr4nvpvKBZqIezBm8dAMdHGc7OPLx5J0cxKzHYMBGfAu6kxHxqwUhSNBMaK3dg6AI0Ae1SftAAb7nAh2t80Khxm8WYeY3x13J8x5%2bP8IkfmWF94EqzLN6HNZux1DXsDq3sdMZthcjoqWaisslwJ6CSgA1MiwqBYSuJwwob2wLPsrHQc7gIIHhWcpjQs5DkE/g2gSvNGqYIbC5yuNA%2bQyWFp8qpJFlMELhqAaT0zWofWHAvX1cTzp1v57ugaJdFOUHoUkKj2Pj2ZnXtWG5n3lOONYBlpO9BuZwfuMiBuF%2bOyq4kuQc/cGEVYySFKm71gwhmMYajCytpG9jYfSl2jBxK4kxx3BH23eqirs5gmkMV5/WBELyzuVNgTjAvVXMnLgL4grTuChPPL2N3VsZwvq/bLrQM1vekyBtSpCr%2b0zRhTp1wpHoLqILcRlxoYmr3WbiqHWo6XFUxVieZPK5sJtV3yLWjDSnleG3luEhVMrGalEVJ8LgnPyVVMv/I9eTIVLFAiMIF3WsUKdLebvyZpGphraQ9KuVNyQtfpLI854v1llVvR4BYO0uDKZXlXk7ZK3M3de2tvwLHVF53dEZc2UAu6h5skR0RuCbSNVVkMmTbU%2bUMVtLpjhkXfkBjYXLMouxSMNx85iIMGxxPKhy9VeNtAvce/dQV%2bUIYdfso343M3c/c/NT73mEF2R7LR//1/%2bOn9u5f/n5n65W/crRvwLZLmJ6J6YMK3WsO1r8Z42YvxI1xiv0bEQYNjU14tVSHQI5tuvGwUDV5vVDyRF7H6xawMOD2aQPbYNyvcD0y8MBqsBWq5lJM6qQ0j%2bg5cAMSqTVOGTAOErhf6aCKaoTbBcrKxBbdtUg2GcB%2bYSN%2b6CC4UGLTKTDcsPH1XdZ6AM9facRJpgXsj8Q5psbRLQsXnlFSLO76wW0D2y9UuP95R%2baz3k4Je2HioVegezXAC175yTe%2b9Huvfv43fuxbp3G//tH/4X2/9Lc/8D3G2iu/nD3MMEvoeGFoJxl2iGyUNQ5iWa2yWJxsMCU0nl0joe7dbTCODRxMC5wsPGHre57qNtjeBcJqBqYADnrgskMpi0gFEmrtYExGnaDdaHA3nOHaooN4M8HkTg8XEePI6girzoZIzinTaUC5NpUC0zXE%2bFpo4flHFm6aNrY3LRR35xg/b2DtDeCs52EUZzjtussbRjRLfEyqJ4G1eYbdOpCFAG89Dqy2A3DL%2bB4fFdi66OLooFDWl7rugSu%2b0YaLIm8Q9ljEY4FuB4sDA%2bZDB8c9E9fvPkSam1j74Ajz0wLrO564y7AZk1myKNbA5o6F9WElKzyymGwzL%2b23n0AWDEKq3fbjxZjvhCDvNmmc%2b0lLoxX9kiUbq/9uA1Y7I6rSqRqREyEpUpW618ytkt6oYKQ0v2r/2LVU6epDKSIVNlHv5FLmowPjqkuHBM8VZw7%2bLeoUdp4MFShnoRXb3JO8aYMtf8pz1BxTFqNZ9ncD7O2Z4XGwwYx0O9XYtpVAtHmj6UJ3S9WhnaDsxDyFn6%2bj8I7Ridcx752gN18T0NhcOIG3v4bm4gmc4zXRQWaBapjEyVJ84Ok%2bwwYVFxdwHoWS7RH5C3XFbEI2yNC5F2J/XuJS38ajWY4rAw97sari18MP9y5WuLynq76eGCcE6nz%2byiOLBfoyqIvrJpxbQHYDuLjPx1nEqTFD2SD1HQTaTUawhwbtAj5rpqNNBdyVVHcJJlmoHlBnzEUfWUvDwf1vVPjDP60w/wMHx2ydGpmKXeFnrrDvfAo8Lxc8mPYYNbOu6z7K4wbh%2b01YIXW1Jro%2bXZ4MPHWlxObIwLUNGxc9YNsH3MhEShl9A7w2B948bHA0q9AcNCh9G1tVjBdL4ILvweopq0kyqbVNhlD5gS/vH83UzU566K4prTKBFpnvYZTjLFE/6Z3eJ8PHm8U2MTtcCHgfbXkYH3Cw9oDpVEB33ytwmtjLvgqtNGIUlTg7WMAc9KRmAr2%2b0qmzwJSbFKCSSadzTCESHL6WoL6/6WN8NIfR78KJXVTBAkVF4K4AxzSzxF0mPu0gXJ/RYgIdt8Fi3pUYk5ZzYa12LRNjz8EpMx0lMxUGtrIST61Zaq2X1LgTA4eZgd0HJo7vV5hlBeJpjXzWwJxUcAcQaQxdYxprDfVRAcNVdUGSDr/lKHnK1RwvjEM4NxaoUmJ4XmdgcyPDD/2wgRdvmLB8LiZodycjUHpRmZ1G5E7tvdky5x0aZqyM%2bxa8q3cCoWHDFQ1065%2buXqykGhYiu5TfSZLw83niCN7F1UuybQbm1LrT821lwBvGFA4fk89VCyEeK4kCeT9JRIs1A0M41hkKDcy5TwTmuTRBWllNLD9bEyWaLLHMKYI/SwPfHrvOJNBthlsqBasZSjLuYgAxRpz5iLxCili5WSwyQb38m97wpT1CaI8RU8ZYTcQfPo4nujtru7jQCzBdUN3OFYp8U9G4Kk9hmUP4Ni0p%2b%2bh1SYZZKNJEnFFERMTsHh1CuMicOhj2leyl0jY9dK6S%2bYRMO5tBaqhL5xcB9LLYOrebbr9%2btlBuNT3fwyTJ0I1s0XwTaK%2byqq2zSxvGqD1f2kamloBsqd9qL5O2ZRSgLraR6gky6wq4n4Ny1lZwYUAwT5/2J7fHeDb9h4w2kwtCpXRglqEtTOU30gqSc0c2T6Seio4y0nhJa9tZg5jXlZB%2bPF4axHJx2hQGxpMcWUmdPuU0Ng5PK%2bx/s8YxMxpHDjyvwaPxApfWQ9w%2bzne71t5n3vyDZ98TuL//h/7ODxyOn/pgf%2bcH/9bhvgnbKRA/rNC/6mCyVwmT3qdLFOVwjYG1eo4jhBhAAXjaMPK%2bG3YtTIoK3jcrVO9zhLxxhpX8HA9rXO%2bYyNn9fL1CtlBWzYwL/T5Be4lBR91rd2sXxWkM/8sdVOyxsFNiy%2bH1M5ENVH3B5NBAeqjMCwjet6432P2MB28nx4DF9o2JR3SfdYCTu6z5UMOZY5Jfouo0FAG1OFQ2nOFmLXaRx36J04%2bFePiv/s7Pvf/jd778lU/9tW%2bdHSSB%2b6/9N9/zPXuTG7/MpUxV5MhZRYcOpotYadvnbL5kyu9c7XBlt8hrzHIWq1Lcb4mm8X5Z4NGjCoPNSIKksHfrCULq0HXBQjpcCFsdnlJc12j5SyjSl2t5B%2bV0jkeblTRBItDYrKc4tHu42EwFuNN2j1RWcJojXactGnXqFbY3beR3Fzh9Hth4q8ZR38PmLBPArsKIYuX52Kk8l%2bPzwxIXTlUAkY3MKUETdVqHOdY3la705LDAxgUXR0c5NjddnB4WCrSu3ovMMpcNBkNN/7ApXF5ifmDA2nNw1DVw494eksrExofXsTjLMbjgo9MzxVnGqUrYjoGNHQuuS219CVrh8gYUH%2bUn4rsw4k6AtNIZC404KPcgsKWLxpM/yT7LadCTCw%2bZreLboNvam622j1%2bdEEXn7GgWnivz92D4W/ZDzvsSCakiNgL4lEhhdZWgf9fz3nL64sNshtPutzDo0TkYl2ArzhEKrKvMzjk7ov98rL39avCUr9VM/Ls5ifB5FgoOgwKlN0ExW0dJiUw2wrQ0sZZPMA76GKUTjMM%2b2JNr0T2GeTJUVl%2b6iGXGhXBaymJwQdmIRtz9ysQpWGxXobqYwNlX9RqqrsfAbGyJXCa835FmFAQyDy6UcG8qZrfVVbap3WWtMI9LM%2b3tOSWpzPSk0w1lsiMMzU4TmKMIg1xNcuIqEbpSKEg2kYw7Aa0UnQljVSGwOZHq5jwsBAwIEBT7xN/LshGfajaBH0UsjGrw6IGBL/2Jh7d%2bu0LC2NIxYAq707LvloA5IzMkZiC3AH8GszNCPW1g7KTwogZ5xxL5zKBrInIdrF%2byMPRyXNi08PSWiRtug6sjS8YEP4LOYn86B15/pAD8nX0L16IGH2bfhsSX%2bhIjaeD0XBTWFGXRx5jVTpTKRJSnqII0boOgFNnL%2bXA2MApLsPiUNo60fhM/%2bKMM5rArkha5zt0e7blQE4RPZuhveJhktpK19JRTiUhd%2bj3VfZOOMC2/R0Ai76cEhp8Zo%2b511a0TE9j3BDBaCTMhhzA7HcU88m10XGFGKDPRtwPp1ksASru2bJqjCgwsJg7uhikO7QCPIgt2XksR8ObQwrN1iQ5dhej2tZfhyHRwi5KYMxdv7GZIxyV6GybSieoOPD%2bzgGOutoaoj3IYIalips8Fnim78JsW8HSJ548iWM/Nkc2At40I0ZtzGM%2bb%2bMl/rcIrL/viTkNXLZJDUalEFDO3kcLqJ0OOSGOY0HiC2WgZdZ5e0bSbU2T1CBH17joIELQTuHp2pGRhKzGWY4gOhnyxOGNpIM5iVXZsplVsJyRTx8JINUoI3toiZduYIZNmXdRUxwhombGMbKovgmfPEDouxtLp1lhq45VGfgBXGiSxiJU6dcZb0uM6aOmRqJfc52FNEyki6dTAn0WqyTxFKBZ5dDqm5l0x1%2b0uBWSv5SSasKoJCmsgoJ1bbvSl9oHgndr3opjAsvoim2GTJ9%2beIC0HCB0ecxdJcoZONBS7ScNmAYuuJ6BFab9BnsyRNl34xlSYTk8zL5PYhm/GEm/8DuUNPLfaVjLNH2PRVbhSnXEJcCmrWV10t1M65S3MhrQ1YjJePF2grQ%2bf9%2blcd3alCxE3suoKsanXryQuVWxnT4olAUVwnotrjMw5ognUl0rm21b6pitqVwex1s4Jk09raC5Q0kxczLgg4bGR5UjzQr6vaKgwMAS407KbC03bNpBnCzRGgILdrEmqkmAlcJdYbaEuDJxNcrhlhfz/tdKNYxuHZOEzB%2bU4wx4cFIc2HBlnBt58cPKZbsMdS5IAACAASURBVLj7%2b7f/8Xe9wwqyHWwf%2bqFfet%2bj6Ys/NBp819%2bKKxfxPFfKBJ3erg1DWPeD5zvYaOZ4%2b4GPaMfCWp2Ik08UqGwUz9Y4VyC5oRvksAGT7/NBjae7rAcEqs1KGtRRBNLvebgTTXE99pGvFfC6LNQFDsY2Bl/I0bCtgTCvJJwl94lLToFsy8Rsz0DG4%2bT82QBvsj4CwHONDZs2kIqcF2BOGQylsd0dOn6pmgZFCqgLyMO8c2oh7OXYMC0ceyX%2bwkfDr37u//qtXxiEi99/L4nR%2bc36/%2b%2b3dyVjP/4T/%2btW79LT3/7Kv/Htv/LSYbYdJxWKOpWCjeOJJSBdLOw4aAjEKVmllqlwJI2QzQk0gWLe4E5eYv%2bwlo51VmPA7lIzqIcw/UZlLjFRTObInzbg7gIHGzW2jyiHaPBgqxQm/UKVYG%2brwvaRgWNXFevJqdJAqLiX4uglAxuvq8n/pOdhg8WjfQ8bM%2brSXZkotuIFjns%2b1icL0bZzTE04wYi1kikX7/Q4x8YFByf7OTbIpB/m2Noio55j84KLw8NcFcXqsyeYi78/YWLCw2QQInAXvRWDwaJE/MiAue/guGvg2ft7WJg25kmF9ZeHGG65mE9r2C9UWJvZOOvleGlooD%2bw4BiVNLdioGGByZOSmfaSS3pWNwniYy2I5QTSMs9S/N8%2bx06O%2bljktapP0TI1J2zTyuP8HAl65zH%2bPEC2gU8%2bQGnEVxn89xqWqwB9le1/bEGhJS6ipV9pZ8/C0hacL1vZt1%2b0lJVqF5r3svSTy8fCK7V6bp1k2oVIG1e5nwt3irDsiQWkOZvC7DPT0%2bDYPEVQrqNwjtHM1mH3D%2bEWmygyYF6z8yzQ6GKnmW0KcE9ZqKmIWWHdLcdESvZc0pOtlkcVYh8M5tiOQyRjrurZVhrYn5W41KUJpIH8RozTr/rYHtg4mOXKCafV5PLFTQ17ECI9nesJhinwGlvUwNQNjm0Xo7KQiS8jWCcpwsV2BWz6GSY1PaLZdCk9l8kU7BR57o29SnMS%2bJDo47WSphWOocA7VW%2bUutkOXvt0hv/z7xJk0m%2bcdJXWyjNys3D1OltaS4cQXbzKSnTA2PLRFKfi/e72c5GU0QO827cxCBxZ6I42Cjx31ca1DRM7ZOCHJrZ1RoDg82uZhQfzCn/wOn3gazn3T3kNLlQxvtfpYM1eiBNNMEqRw8CxLgwVtpmTL3tF8B7v6OYFklI9d71gfwkWi044TlYnZkHzBOPcFBA3ZmMYwqDrxmE6d9IIaNdv7nZkjCKewLA2hElXNxnZd5INBPlTNJ0Iduqj5PNqzbfcyNS51N93DZRxjuO6FC/71x0D%2b1aEOwsDVy9xRdfgL2wB17pkpxXo2K8M7MUNbh4Cb901YeUNvvl2hvSsRGfTxGLSwJ7QLcaBMUlQs9EJcWFBT7dS6hqMm0qXr8ZWhRe3PCxSwHt%2bLoB/cgBMhxb%2ble9r8MpHLDx73UCSGBhnBGS1MI1Jdr4Sp/e4kiWdH2Ob3Vnt/stnA1Y16%2bJbeQ8ncbEJVMCd71NhUFlIdsi6M2dvKI920d6ugHcVpxRrx%2btIWR7lYOct7y3YttLAS65REwrtnio3GspqeN0ZA2Lxem8rkd4tVjKKKU/4jnwe36OsG33xhVdECIGpEiCwM2uHVk8twnisokmD1RU/8SVl05CFpg0iwbwp1pLsiEpLSW6uz6ZbvDYzMU9gnBAZjdaj68iDqqIvvOrWqkf78mIpcM86K7rSncK0hujRBlZq4bgRjKrv47nm95MokKasjxFAnONc6a7KjUce%2bQ7m9Idf2Qj45Rq2zbNWpFUCxLU/dwuKlA2s%2bkvNHssBIg4witg435dVN5g4KZSNpXR7raT4s50kQ6%2bUYthZkqETcZ/Uh/A9/LvdFPPPglR/mVlQBrzKSYb4iPMdGy4RWNsWNexKz64a/VlY0JIVbCJEjMZsfYOC57uxMNXNMNOyxmRCGVqD6TTH8b6PxWmGh5YH48hEEJqidX/j/vgz73vmi//jZ/6nH3pPuccP//Rvb92%2b%2bcYrJ%2bZf%2bxXP967NEmVduWXOcYBQZa%2b1oUibBdusEzwoOxjqbqU77lxq26jTP51UsNYrbMYOzGcqFCwAJstOsM57LbaQPp3h6tRHOspgRxFCulPVtTQIjXdLWLeom1RNsyhlTR46ggV52iUemg1umQpb8byd3LOwdUktdqTWBAaeNi0cDFNsTUOcDFLMz/SCV27%2bBj4zROKJrxZqZ0fVrjTdypM7G86v/efXn9l%2b7V8WaFd3xntsf%2bMXP/PynWe//%2b/95Ca%2b62B/jlmewnMM0XjxAJmeoB/zYlFjVrrwnAqLWDWMoZzuEBWipsH8EJiFwP49C4uLDjbSKWzd2aSYKi32/kYtfuobdSJB8MSIlPTlhGcb2GxinFhq0pKVj9GguJvilED9m4a0d9%2b4CQ3Sc5w8D6y9Dpy%2bCKy/0eCMxadk1pMMN0sOngY33ARvZ5GWJ6g79hl3gS/u2/juyxX%2bZM/C1pYjYJ1Pbmw6wqoTS7UuEcsb7B2/nLucSCWy7jbYHzpgYwIB7nsWxn0LL99/hIwet9JBtY/5pBJWn57Y7KJqFAU2LhqIui46US7ZDWHbxTtb/b5KLKmbXS2qNDnwXpf4HY9TfkNgT/CuXb2ELSKQlwmBj%2bvGfjyulplf0vMrqUM2MmpJQiFPnsgOLIO4hiXyuUrmJp/LbVWHLjFypRU1/%2baxr%2b6nLFZaVxg21mFBtKbX/KCLRTpd5tSfZOnIiMyqLvos8pkbGIaqQLV1baF2eRRm0rFyLSxwljoCtqV%2bwjuBm43EJkysIEPqQ/VVMQw4g2MkJxsoB4cIp5vyk8DeKwu1aCvoKKOAezav0B24mM8IFU00l1JYD8keqByIZTeYnVow7QplRzUCc1idJ84nuiZEUrcNTmz1PP9XjhOVpqcve02mysTetMDFyEIaOLATeiwDeeTCmeWYRx5o/%2bgO3SWoCUS7wviktKuV54kndOQohqIFSkt5k0gNQuQVRerKE4LNm8hEM4YwW0cHiwd3gS//wwKvfynCjK1kmYEgY9lSL7UJszJQ38hhcC4mkKe1nzODtWmgGjdoBgFcXRNCBn647uDksMLL1z10BxnWNl24RoUXtm18sNtgs0dQpeQLeVrhC6WFLx1X2B83eDitcPshO7saeNZvsJkn%2bF6rg8CKEVo2vJ4tZ4IwiUKaFmrz7E9rverV45WZCFk8raz8TCK8vmJe1c1bIYlVd89ISwQS9krockG0stLkYcc6ZLNHhXZZIlPWtWzMmgJdi900gaY8hmWvS3HcIDKQTUs4XPPMS9xbOHgjyHHodHArM2GXwLPbNb7tmo3nqhKXHPaLUGulo9LAo1Q1m9s/KvClN10UCxahFohPS3TWW8CeY3HmwJimqM9Yy92HtFHl2oadn992JENUiyMUfT0r3BiHcF%2bYI8uY6WnwIInw4ismPv6JGZ655koNBId2OjcQeO1ZZowy0YuU/EDgKTv40t5RxxhVq8AMQ%2bsLrk71JFOPSbGpzayRKW4g1G%2bLi4tdYcK0jAZqkV3BYLdQsbytMM6USYD4YIvzpipaZ9xpYxbHrOyGltzw5lPgnUD7PFKrXdWDQttPqkZRzFwrX3hq3CmlcZwZiooLMwL1GfKSNWYqHpCl5xhz7XMrXj7D78or5eUv2bAnA/DKpNH%2bShaevvCBr/zh/cCXdy3mSsZABr6N9QTyfhDCZMdZLjW4wG9YHMhFCjeC%2bgmikBmkGj6tL6s%2bXGuKRdGDb0%2bRliyu5L6eSSfXnl/LQqrt2L2I58Kyt9s8Tpfe8OoxBZrUuVbbnzXnSYG22C6SlFBvkhCjdfB8fzJXY6otZiVwF027LkymMQK7mypHe9V2S%2bHux91gljstgMWSRZUaWY9TVJT2rHbhXb5Px4zTxEdox8s4vih7CJl9YRGzkI2G%2bOgT5HLuE/cgYhT2BcnYPNNHWZeCFbKKWneOBUscWcq8wUmZSwwvZx6CoEFsNMjiGouxjeQoxyOmyE5dOK6JB/t/%2bquD6Av/8Cu/82fLPWgLeW/yk794aa33sXtjxr9SWUAqgZsw7QdNhM0yQT5itpc8gYGNLMWh68v8MGSTrgaYssFbL4LfSyHTyDqLmlnjQjmNh70whWHV2GBRaxRiO6zk3qd07vbURXxzhksTFyV7YJrAVx%2bozO7LtoWv15X0euLm8vzROOBIdccdbDTa%2bEvNq3L/6EzI9FTFdMetME%2ba3Tpb3Om6b%2b%2bW9cFbPMqB9eqXvSjYJ8P97NW1w1//xb98sHpd/2X8/t7A/Zc/97LRvfY3f/LPXfjRP/zynIkZZLktEy7TLQRa1LNL8yWC9kQ1ZorTUpj5NGWHPSA%2bBHbZPehegXLTEaZurYxxaHZxoZnhgJKXcoYjp00barVJbWC9iXFsdxCdFrh9qcD6G4B3hQyAgYNxgw0WTQ1cZdXY97A%2bS3HcDbA%2byXCq9et0gLGMGmdnDp4J5rhdaR2Ivsmf8xLslpHgnpOjAht0djmiu8cKW9mCxrYlfXvmV9Bf6xg3OQHWt4Dj41YHBfRHvEn408E0KbB%2b4mPPLOAcOnh1nMH74qv44Lc9i%2b5LfSxOc4w2fUy3F3jaVJ7Zg16BqzsOar%2bGb1RyA5LFptadsbSVzHB32iZC72Ce/79Gi%2b7y17IIAthpkagxt6RF9d9tcGwLjduPXmUglm3C9WS67CioWX%2b%2bhwuFNpa1i40nd7M9Do6bdkEhj%2bn9bS%2bBTGMa4/DGWzbXETZOprJlYOcvs2KA0L%2bPtLiMvj0R%2b0cCzj47PepFx2MuMiY94mnV1nJJBrLoCP6cXfsUbj40TxGV67DMSjTCfKUfGsjZUIO%2bvpElesJFo4pMvbpEYtrSpIzrdK7284WlQJ4ef9S7y%2be3XvIWcDBIMJiOpMgrzoEwKXB/u8JT%2bw7m1xOEuxHub5W4ctS6pACnlof1KsOx5WBUFTiyXGwUuXRDFRbSMODGBOwu3FmB/pCTHH3Pa8TwEApM1Q2Xqhq17yMwV%2bzqaJ/VXk9O9rSSCwicGgSywiFTqhgrE1qaY3IcF5LBm4wNPHy9wpfetnH3d9kuk0gB%2bN5rHv7ZHdWcRuc4gRsVTIKcgqsdoOECa9NBU5GBD%2bGtlShOGtQjB0YfCPsWBqFi4a9dL3FhzcBzF2xsB8DIbNAfWvB17Qq9hPdy4NFxiW9aNo5PGzwcN6LBf/2uiRthjYuLGBeGJi7PA0njU9rAtYTq%2b6PYWm4EIZ2OhXEzh52o7slkfaas5BWUqZFDO4i5GO6oNycE6PQb77KATG9xAotARr/eSnw0zTFse13GTFMdwrM2MU8yJcEqK4xrFydj4LWwhNEL0VTsvQC4Fw1c6hr4gMvaI%2bDCyEZg1JiUJoykwGFtIT4rsJsa%2bOZuicLwcXivxHRRYDYtUR8rP3acFlhMLeBBAGMA1AelsOwGgTb3iXKW2y5qS5kT4GqFF05DWM8ulAPZvMHkrMH0APiLP23ixQ9akg3gWKIjxoKFyhpwtcFCtbZXBeqcSwncpY39CjnQgndKe1pQ18YykUY4lrjedE0blNtKk57l%2b1WhMoE0S52SPEZjcH5qhIUn0P9/uHvzYM3yszzsOfs5337X3nu2nkUjjTQjCS1QyCEYlCKOqVQqAapMTFicPygbkioDcSpJkT9sESdiccoVFw4lFkMqTrARhqiECcjYMCMkjTQjjWamZ6a7p5fbfe/99uXs56Se9/2d737dM6MBGxzM0bTuvd96zu/8luf3vM/7vATMrqdSKk5GnMuYa8N5spbkU/0watHLoi9/tyMF%2bXpws6HrqAJHCzGTWk0hJyFQQm4oFOgl2QytoGuYe/1sym16ZLul6ntPQLGCeQJ5TVp2nASLNBcZ2de0RbynQiw/vxGPKEypEayrt1pIyDJYBOwO2sEKGW8%2bq4tSuiTVu3XuabfVIYYkSMebwna3kOdjcaFhboyA0Ir1VHSRFftO2fwwZ2aOWDYs/CQbvrVA2NaiTjxWiwStDseAvuTE%2b%2b0krNDceykAJY40muCqkhp9VgyexYiACau%2bnFezthlyWKwa6QzDnD6qDZZpjqzsyoYkCl3t22bO3uiGpg84wpiLO9k9ByMUUUBm/mQnRQcZSmNo/UiScrRsIRJrZW1VnhOrQSfLhTDtavJhTAsYJRB9u4OcA8wKUPB/OaOeZN/pkuKgTCxh38sqR5xXmE98LMhGH5dYjjyErRpRq8ZyWOD1gxaCwMKNw%2bd%2bbqf9%2bz/1%2bd/868%2b/4UI2Hvjm7/rZUy9dP/c93bPf/LHDA0awWXsDGI4Vq2wLs861RTQmEoXdSxPcCUIpi0NGfmuVYBwW6Ld7CDsrVNu1%2bLMzsFhxDCUO0gdSdMNajH0nqxqX7gvRcmrMc7qY2bhx6GD%2br5ZYZCHcoBJbSRJa4gLHBpPN2Mk9YUxlTrcqwRcVPL9AvKyv5OnqKh9se69e4euLUgH6hXPDg2x%2b/VkpMSuHj3N79iHa%2b/jkT3/7nzhY32zztwTuf/cXvvSuT10//1/9ox/a%2bt5/9rsJFkkipV9p3s%2bOQdDO6n0C2llNlSXr4xJ0UGLVeS/THUo8BxhRfvmlCoOHQtndnQwwC61xLrp0nkh0TI26h/ZxjtfOlHjwwMOrFwuc%2bipw3PNxfs/GreMcZ3c95FdijJ6gXgo47uv7d6hV7wZqkUQ7n2WKK3kkN%2blSsMRrVRvjowxffz7H5awtt2x4zMxlZS%2boVR8eZvL6TeDbDIqmsZqBKa9jMYShbqR3d4HxsfaHzWItBNh9mde0U8xfZ0l3YHls49VZgZ1nv4B3P/k4hsdLkcv0d3yszmTwLQv9xMFWv8D2KVsGT%2bgo48Oy8nQpaFxmdALiZK7ffe/k8bUG2hue2wTF94Lkt5KamPc0rP29n9kkqFJyY6Kfwpjz4CJF7T0Xsabdm0X2rs9pTFTNg/e%2bptEXNiCXmlO2Ayu6TjOy6TNMsx56tBq07HUpe2mrezx3N6UNvP%2bTxMW%2bKXpTRMfwV3vGy9ASjXs628N2VCJe2CijWoC71z9GOduHs6XSmUl4iNZiF1ldSxLOwCllIafjVqNzz2MH88EI/dm2WQiom7Qw703hHjBJ2ly83IdKNgCpFUrV4iDO1ve9qaW47quiWPDhseRxAyzbrEioEMNf5sg6PnaCBLdWLfFqP%2bjGODOJMLMClcc0DDjDzUGAiFRtE26mLnUDuNM3mPdanDY4U6JCVkQoLY2qSRKyBLoitMWv2sN8UmBxZOF3P19i/Gkfe1vAa1MKNoEnLgYouOGpLHz5BtOrKLFzUD9MKskktdpLWMEO6oq75y7aOzniUYWq78DdrtHruuiFHnbvc6Tyq9v2cK5T4uGujQcHlmys2i5ASWvKgmkJMLMdzMqyZkDiK7dqcc26Pq5RBxYuSja%2bg/p4idK18PjCQ%2bGpE4LndhHQf8d1ZUme1wVsCd7p6i4Wri1vDcqlLxsteuN2JItEcQTL2jMLNl8lJUqwqjO4GRA3CZtZLYtzlQMvdyw4BQnuGgcs0lbWOOMXwHlfSJenglr81oMdD30mW9Y2wjjHiOw6S0yMK2SzDC9PXRwfuUhWFSaLHNNxgWpuwZ4VCPsWlkc2HC6ktHY7TmDRlYS8CucfAnbKYuiNTpa9rPHEKRZ5seA/woIvIFuF8e0a7/jmDvY7Kzz5YYcLHyQ2VHIuO7HM24Q8hviS8SEJpBFND5Q1192CAkhpY/ZJGlIZ%2bMefnD/bnotlTtGAkWFYrjLpUQmrXjBOIetUXamkqaaGy0RYFLybSVZu3Il3e1WxmNgUkcVcA418EpQ1euomCcpxVELDuYoe8HmuSamanE95RSWRBctaCJkwWfakmmpRdtAWfXXD3NIp5GSU89d2YCPNxwjcARZpJYWeqK3vsdqxMK5vvTrctcbdw8o3kg6ZLjccWtRtLEFhcYNiiR5eZydGNQph4eerGt2WhemKJeFVB7%2buGWDSS8tyAtchoGfEZ46VyGgqRC6darZE/86DzjSDboHR3JWf46kraySBfNSmnMZc35pR179F986JUsicRivOnCllw8UOtGHjzTS7mSehKEHtFmPKcEznaZn38LkFNemyMVAkT2BNEK7ri6BF%2beSm/Qjcm/dL7xUXomKtlW9cZpo5IS47AjypZ2cSqunxa/wpctzUQZGnQrLWVoDJipVgWYGUxZY8YdtjP0aVusiKCl5hgVJ8kpurYYGoXWFyO0DUqjCkzfexgy%2b9WF/5uq8/%2bPVo9PTffjvJB/3cV1X90duH//HPi86d7FINbG0robk1AI6GwA7LjXI8GkVC06WK0sF5Z4VJp4NOZ4lqq0YnsETLPqDrX6LkFaPUeeRia1age66Hc0EmBfmuL4BxbOGVWxbwdC0J8vUGoJuNHMV4rP4s4Ly6wmhgGc8FoPPo%2bteuyLnVi5ddr4ULF4YH89uvHdRefZuPn9sLD4E23q4t7sVBf1J/vyVw567JP/XwX/3Exz/yE//k1xPkVSo3n31Q9OyJD88rlSVcOYjTUq2HatrgVVh4NjpFjRWBuw/8wZGP99g5ljs%2bokNNIpU%2bzOIs1xjSAcKLEeKrK7TvbyG9ukJwXySSmL2%2bg1dYqGisRZB2Z2TYQ9HHEyTviDNMIDeC4H3S9TCZutL5fVcTmThDNkD76EizDXb2fIyHmer1N1h1GQz3bI5ps0c2ncfu3gmjzjeKdKZpyQ3Wt3lMqksy/47%2bdDLoK7hLB/NjF68scpx6/jm856l3YDhcYevxLpLjEtGTLexR%2b7mVYdqu8EgfGOxwQAItAe%2bVJGCR%2beF9kaz3xnqOkXgliN4go1l3nLdB9pvym3s72yZgvndBfcuOyTbg5LnB3MspbMhfNkE7QTc1bDwP5ZS0gTeBqLymKbJg9PTy2pDFPuYCeAW4U3pT18Kqc4Ogvjv02TWba0k0PLF7vPcaJFhGWTLZFvYjfpwFWQiFhedixUqo9jGCbB95cAdRsY80tjBtH2M72dUd/rKE07Uwoc4wt5D1jtE%2b2kYcqke8APjYXhcVW/Qn6C22sOjO4N6J0O77iOeqBZe2MppMl/ZUKesNGNaJ8oy9Mbw7WyhOj2Hf3kJ5aoLoaoTMeNKV%2b2NEV1rIIh%2b7YYo7iepiuVDtsSpqZeMwCbAfxlgQXFcxKlLochNoLUZAbpL6NkLOxrzipAk39Mccn4lxXtA%2bpHczCCO07AqWy4qyHo4Pcvz%2bL%2bR4dWjDv%2bOjswXYUSXWlQwDR7aNF25kkhhgMXH1sVIsWKv7C5E20DfcYQVW5vFtdxDt5sCWi3hUwunX6PVd7LQ9tNoWytDGYw9WOBXWuNThGLVxzue9pZ%2b1DuYyL3GTvtYl8FqN%2bvII1sGIVUMrSRa/foMnZuH%2boEDuOMLInx84Uk/qzLRAFLIEIf9bwI5rVI6FjqMFgRo2nSx4lx6WUjmVkGcDabLZSWCzfgGZRmgxk/E0xTyx8Xo/h10Ct9wOuE0QKcppGzlD4GWF81sO3n3Gwn1tdfd5wCvRosskC5ek1LwCB7Mar9F150aNo4ULKwWeu5wgPSrQ2rGRHFWIBowlF4inJum0plUnmYoOQGdBVhLlvsQA9pqAnZuRHHjHGRZ7sRA8GiOd21iNgekRcPEbW3jyiQwPPlTjkQdtjJIaaULAfDIDtVsl4tW94U7tYnxZK6K%2b3EOIWICvTYtSVOh6Kh2Qe0g3EY%2buow46BM01K3jXuB2XIBYgWGy77jrxf7Uy/ursB06EWd54l1CawmRUnXhm6QIdv63sba2gvUj7WgWTMhrz/eKoVFO3O0VWmMROqWpJAD%2bA685QFCxdP4UvTjW1yUfSeY9Jrr5P6UxXCA/bonymhzidCEvv2VrgySeDnVOuYiHwZuJSQ028VGi1ZmpXSJatmXzl01nJNULgxZinrIjeX/vG3zUXvsmiwIfoWLNcxvLTKcfIHUYDzf0pa3RYBMl8z3IxRafTx4xAPmRdCJldEToLHC57aHsjWM6W9JtIzlslQjxCd4GV/K0LGy9h0LjPGBAvYL5D15CT/rH2fzdzd/N5qsfXg17wtJOkLl3zFQpxnbkrqrzeMWptD4JvgnLJA6ho9ap/87xkk7BK13li/Hvd5ALiKTumjIlJ/2T5dSYg285CUGnVwW4nEba95U0kF4C2j5TI0DkmXS4FpNxLMHFeWNEYJFPgvih8lTCWWniO7V0mNbKkQpbnyL0aVgZQqTc98uDGCeLCRhBaWBy5GPkWsrGH518pr/TwuX9w9V9841smpm72lSe%2b7eNPDOO/9mtuGDywmLMuRCXqwHsTxvkeqhH276tx55pGsnbPlojnHtq9pSSV5gtL5uNe28PN7lLIk6AusAoC7E9yVIMeTvdK3NcBRmmNZWlhnFi4dtvB6NMu3HaN3q7u5JeitQQdq65w0S2zxVXXYq2Y4ZWyphGmi573zBccOLfPnd05/P8LmN817t7kj7cG7t//y6euvpp99G/96F/5%2bSLLsEoSxHktmcmL3IPnVIiXjuhU06QEi4iFqwpzzxYAX0980RKhSDH3gVderRC4Un12Y7%2bvRXbWoHfjBI87IU4xgVQcYJR5aUAiw9JMOB12QuzOVSZDr3Vh16VYkoVHoyWuFm0BVMPjbM2oiksDc91q4ANnSnz2NotgbARMmuiJ2RxLA1nAZK5hFkN0yplqPSm1hDN28YIEy9ddOBcKFDcc0Q07FwsUCXXqyrYtr1lwaShxbCP5nSHq3k1MMuC9D92H3uNdxOIu46PLJMNOgofyGp37HOzQKrCuEURajKnTbSNfzsXJgEdT7ZO/c8Jp5CJNswoDbbTvTDOYEPjSbcZ4nTfvbx5vQpCb87XYJ1E/bqJDdHjh73wvP2vT7lO%2b957Ng2nO9S2/67M37j8153LXCbhz1Z5TNtRsSORzTIdgAmzDsvPxbkSQbpJMN8B%2bcz7N16ytJU2flFY0eENeKQAAIABJREFUn7m5IaGLzE5LC96waBJ925PoGEHMyn1AFY0Qz3flmrZDFp6h3IVRH1aw42aN4uIS7pkRVqNdqYdgSZKqgyKwhfVYsQiTpe8TqwxL6wKwsIREcrnhm%2beoL8RwDqhF0FM9GMQ4P4twmAUIlim2OEGxEMTQQ0X6mBuCOMdgu8Jk5CB%2bcIHglQ66O6Vo5eP7F4iudBA/sMDpSYAZIkTM/lyPNuUq12w77R%2bZoNd1NaRtIi1k12Njm8d%2bQ4xP1n1zYZExbAbyCbPHCbUlLCDZKS9IsNV2gJWFZ58ucXMa4dn/k5WMKSOhvaMmWfm2hdCGsO/SPgTGuSNFnMQ%2bxl8AHLME8Oz39IPcDeFt5ah6HoJtG6tJhf6%2bi622hyi0UUcWTvczXDjjYLdj4d07FsKOg7NeTdMbuJ6DyNgx10WJKyvg1cLBpCrr%2bQrWYQ7cGtW4NtZ7z83VjZualM6%2bxvtJqQzvZXicgAT82SBXdni7BUvsXC3YdGLZa29MlLWMq6ssQqJiCf1fZePCeb0HFwcOzmxZ2PNYwRT1wHGsS16Jnm8hLNU/ntKTjK4T4xyv5BZuzmq8cAdIFhUOZi7uXCkxXeVIjgv4WzaKYYWob6E4zOB1HMTHBrDbO6gOWfGUN5o7L7V1FH2OVWril1h7AnigxMPzCN7jMYg1FkMbk1uAfZ%2bH/%2bQ/qvHhD/PeeshaAabDVCM4VXVXv1k7%2b73ZatZsGinAioyvsgD6Cl0fmLKRm%2bJKQnQo2UGgfaoDxJmLZUmgp2KFtuWKFIaJepSK0c6042jSY5yzZFcNitdabhvzlAXoCNqZoF2JlFAtI7l7oBZa%2b7%2bCZQXuOmHwP8PIypzToFwToYpYA2eGKOhiviIz7Ijuva4V0EvehDVFSFmNiVxt8jCUyhCsn1hL6udz20cnmqQYI2DCqFVjkZbijkTA3gkC5JSSVjVcN17npWhHfHOooG5hNaKIEhbOEzpfcCyv4kT08pwvmNTKhFZWuJ1xLHKOo5QsslHQkYZOM4YR8u0ZVnTfYcKr0fLLOrGxWDCxlYz8vToo5qEsiy76Xa2loDkH5vwbMG/6URR6AtZpKymvkVMym%2bOkEDC/GZxonGj0lp0Ad/6tRaBSMbhgYixBu/jLizNMrvep2W2I7PFkhWE%2bgjrdUGPP9%2bnmIU4pIlFmmJKhljdDXvdMMuqJPIbfQZmWFAxM6DNuC3Cv7FD69SKbIy88VEWFtKwRVy5aVYi8yLGIa9GIs45GVQUYFyWDiBhlIaI4xmrmStTxDz6z%2bJ0n3/XZT/zOz711Yurm8PzL3/%2bzp5756l/6lZ1z29%2b0mlsSretv3T2Aj4%2bUBKVykHmAp%2b6rcetVVqAHvFaMYkDm20K9cJDcTykBcMazUeWVROzc7S66lJulFR48b%2bG0XeKrCx/pssJwYWNyucDNZ%2b0rblTByuZXu/6NK0U9ffn82fHB4s5rB05g3z53tnv4yX/4A3%2bqspY3m7b%2bTR97S%2bDO7OCnn/78u3/kf/xvPs0FkkSfV6%2bwLH1kSwueV4PzWcLEKrLlcYWlywppQDUJkBSxWBnmXoj8qMTlNEWXiaesCw5gj6I3SlV6EXZNkuqox8QEC3sL2hnWIHh3qloZdpHAnLDrgukE01SyKE5nBoAL%2b23h6DgTBpIsJgsT3MugNztyPr5ZxpzvmYyBd4wivEjKm4dj4X2fj/Hsh0LgigvvonEhsC08%2bfkYX3xfKF7cNX2z%2bfUXDb1MBvQGkTzL8JZot7hgKMCx5vSXZNF1H/Gzf4hV7eKphy9iMlxh%2b50DcZeJZ4WwrF43w1anwqlzFhxWp2UkISolKTDLbbFGlHC8YamnS2OXyMcIag14bcC2lKw2PYeTG9/fgN%2bmQzVODWK7uHEQ5DdWjMIiGqZbnF5MuXFuCgjkOenwtWuJuXFruXeD0Hw8z1vPkUWMukA2Q6/FnnDCszebDJmsTB4g38NrajSvDcvO72c3a7TqbzVYpH6WzMZN/kmNGfrw/WuIsi3pO0eY47TdxSw2CZ96p5HRCjJWK8jO4BjxbFf6LiFWFhwioKtMcIh6sacTcFELEyuMe%2bcY7eWenB/LtvvbQ9STHcBheg6TVR3M%2bxMMFgP5e9Gfwr9jNM5rVyV24MpsYios6gjtWkO/twdLnJ20hY0n4%2b5f6WCwYxJJG2lVRRlMKv2HWvYOWUvTGOt1kuV6pf55pLpURxktOkc1h/jQmz8aNxn2scaf/t6252tnmYV%2bEGEpXv5a6IMdk/7UJAUJrqy0wvi2hRd%2bI8FXDh3UNwK02sDuBxIsnwsFxFOe9Tw1HjZb3YZN5MhiTg8VAKsJBjMQJVudLdTzGtbFGNXMgnuqQjmjlMaFvQ1s7buYTYCdLQ/tjgWrTSCf44GzliSzXuhbMoftuTX2IgtuQPmaI3MMr5WRuyRVv2SaHyxyYKJSb4wsB%2bOyrGcrWEPiQNfGzeMSNSevEji/q7oPpSiaeIQWctkzpiCDFuqB6xDfYwclBpxrDZNMSTmbT5wxxFTBQp6WSErgWkI/7Aq3KguH0xrXDkrcmfk4uEIrR8pegNXtAv6OjWJUwRrlICaMb7uwexaqyyHsNhfQIWqWnmfBGt57bkDJrru0N1FWVUBrZuEd%2bz6CR1JxE6JU8OCZAIvKwjvfucCFD/p474ctnD1rIbVDJLMEacYkPxNpaDbPZuJaE53rUN%2bbyT2o3dVEwUjENjZWHAt0s6G0kCBRgHsjitA1jUBSJDK2lrpXnTt70QRFvY1OOELGRFt5tAHAQJsMFMcMwbsw7tzQVlJhVWGiLW5r3MAJsGWFWBa6KaamcNPJnMZPpaUkizuJR7nIfUyEsVbvfVYLlo2AusPLd4ssJrQQ05km6GOZzBH6ZMvJuitTTXtJsu0E8jzEjUZ%2b24D6EgmYCZhPWeiMm5UgwHjlid9/krP4olZufcOxAYZ575nQyiOJNYouMpogRWkNpJgV6wXME/ZyfaNULa61GvJyMUJlD9AJLeTFGK640VgoSv6%2bRQNHhLbaTPJg5VYy0ZTS8BobeU1kzbAqNCJCn/jx1MFAEr1P0ko0r0Crr8p9XGkFVsn3kZqN6pveEHcKvNneapkp8pcNL/k306/rJzd3S/OD%2bH5%2bLg%2b9iyVWZR%2bhzboQepCBZ3SNchyuPZTHCIBvJDKGcZL3N052Zm3Voku2yFGZa1gIcF9IfiKj9RltNZ0e8pzzVI6jhVpB2iOSFzVGKaOIFY5Wbfie1q5JhyWefubLP7fXeeb/%2bNzbJKZu9o/7P/LpH8Wpr/8YprROMw4/98hdTRNoYajSRraycd%2bjSyRtCx23xqAV4lZriXZQoVs7cPttifZ22xZ6yJC1uAGpsGUsO2/GLqrMxvRGfhVf%2bKX/IctvPnvu7JlDllT95J9CkugbB8S/nUfeErh/1w89feqZf/np/R/48b/5qSizztILdBXn8JMFMn%2bAZVwIs84ll0z70nUQ2DWo7Q/uVHACC9aqQAyWQ/fw0ipFf51ZrBc37ETYmydS7KhZ9LepwbUrvJK18Q5/ictpC4NBCYt31hTfGY%2bV9nqYuvW0LRp1Mv9iA8kE0zM%2bjo8yfKgd4ZkskTVmvb%2b9RwLDz5mNga09nZeoV5dIgVkkBAxyHmVhAykVoUdx3YV1oUBFHdnrLvyLhYD0W/0C5%2bZaAt49X6K8ZeF6t8LZkYt6v0S3Y4OOK9bSQn3sYFp4yJ57GokT4N0P34/FKMaA7jLjHHvnQ7QHLvx2hn5Uod1X5jWwHQHuae6g62fIxUPULG9m9PMvYdMNG025SAOm10yzCTU3Xe3ezU3jvb7J5ogVpPkqus1IbozpRZt2Z9Stq75TJ%2b8%2bdearjQ1UQ%2bKYCZHnsJZNCvjQiV0SJA0g4GDlQcAuLKZZfnhta9bdtERzzo1HxJqi3hxXxgN6hh788Bqy5D707Im8QolhWzzbyf437jJy76NjrGb76PSO4cU7qG2dnBeZgzw8RpTtIvOP4Bd7skmjc0qWMiG1kip1SAtUocfK0nAtG0n7GK3lrnTSOCuVZTKfKQF6m0mrqq1cVQ4cJh2ZiFAzJpoJsNm9CIDVFlxfcWXf7VV88lwzDSjbJNIYJIZ72mC66gqlr9r2xhu8aSv%2bFOBmvNtZwS5qa5LqWyVKS8DKrrGis4kJZUkCrKmdEtCiipdPd5GZi%2bmrMQ4%2bV%2bCF2zaqaxH2PhDDpn3mV32EbQJ%2b4PmbuWzY5dozB/UlenoZO0nm3bDvnA5g2SOUtP481QLrzfg7OaodD8Wshn/GRj6p0Nt3MZ9V2Nry0W5bOHW2kHtwXytD0o7wrm6JbebkONTF1xhEllSXpfzGrCMSrm7aqGnlxkaXgJ/mOGJRt9b8n3RQ3rloI2lwcxzyd1OYEazX5aWVhInj2hJJz/g4x%2b3SQUKm/laJg6mHal5hOatxPCkwGNBBoUB7YGN5UMGjj/5xLsWS7B5QX46kqm29GqqdIydR/qMkxjjESF%2bTKkjKmHED8q4znoKGRzJMvhBIGDzJa/h/ocBfeLzCu77OoXIffoe1AZQZ5wdQGrOZu8c2msx8bPUzxGmGKIgwnrnY6tFKL0bon5gMrNIVwqCFEEsk0FAgP5Vyr6CawwpbKMoSbd9BRc/JoCdjUcZrvEKvH4DVP3xXN7UyBoz/tlbO1IM0S05fuYpFvyYoqEuXkurKvOt9VAeSJnHV86cosj7gThEyU5qAvpih5Xbku1xngdmqI/lK%2bk284TZsdyaOMlrMR9l71TufLGCN/KTJF9Hk/TnC4KSIE5uXhZ3UZlLfoWBenV34uOfM4doDJMVENhy%2b20NWTJCXaq1XVCy%2bSLD5VnDBwiJN0PEoUdLWajY5zQwklWv9FFVZonBVpiTP0UUmtLFYTlA5zCugtAYSXaVHd1WNsUi3RUJjy/OMti3k/E/o9pNNkCS1ujMs8w62qYOnrEsA/ImNZNNBtL11IdI21PmRyas8VsY7vRmRCtyVTefRvK5JPFVobjZVTZ%2bxK8RlT86JNpfcnDbrnM5/G%2bN9zZSo3aOufNrq3JRkdRcpq9l2u4iXq/WaRJa9Ia9oCVlysbBDKbpES8OsUFKTBCW9ylYLG%2bNpjILTa2rBYQI3z3PqY5JVgqV4SOIr6xqsQvyT/%2bdTP3Zm7/pvfv7X/suvmZh6cjUA3WUOsr/2a67nPyABpppR5o1ZTG6N2QzzPFML/b4F9/4Vzu46qJYObrcW8Hd8XPBbSIpKGHaSRnFaobftYzvQMctmnKQW5pWDyavl1eDOwVe6%2bW9937%2bLbPpmG77V728J3PmGBz/y8Se%2b52/98K8%2b5VuXXhqvkGU5hiNge%2bAiIfhgXZK6QuzRY5zlxWvszAIctFbw4xZGboL9RY288PHKIkXfBYbdCNtTZfXGInVJMO4GolPnPXytaOHhYIVXi0iiaQ/5K1kUJp0A47GDh4MFXivaoBvMS0UbPkEVGfajTDrc3r76rMuAYJGbNQgzWd9k1IfA9q5JjnMoWdGEKpG%2b0OuzVl38ekwZxwj24%2bKmA/ec0mjFLQfuxRL16/qzvGGJBvpGp8S5hYsD/ox1uiwyG/Ue7bJsCRkLcD8icHexen6M0rmC9z72EKbjBIN3dpFMS%2bycDzA/KvHAewAn8rDXSyXU7tkO3KDUnWegrhNVMkDlT9APbCkJLpNVpMWKBODWwKD11jrur9lZNsCDJHypUkNY7o0cJZkDRU9unmvKFcsEGRjduVk%2bGHgxQRd5ffP3RgBRterJTBdhv4eOrYlizaZgc0KlRn3KEOzG4rKeQrmQJXNZTJrz1XPqI8E1tNItfZeEZWvM0UOdxHBbETL7JvbQlTLxRYvyGHWRkSmHPuo4xmnsyGNje4iQGnf/EH6xL59VeEfw8n3ccQ6xm%2b0ipRyCMhmTG7GsPSStIaJ4F12UOOwOYU124DgnZbj5WjLXUiDCdrCaF5LPUJ5fwrnZXu9Jbg5inJvoDTjYinF21MatbWXdDwZLnJm0TpwibOBgFeB06wSgU3W9pJULFyUB7iYEsW5oWkCGiMieNAjHMH/UUG4mpxKwR9ywUD7zJptlaW7ThmmhG7okbiGMFtKPVnEbYbhC4PpqJUa3hFsFDq/VuDHs4PnfXqC3p5uisFth%2bdVQvp%2bE34u3ci1Hy8%2bXOhGOhILrRyRECOSsC27BPhOg5hrnDYG9Fsp5jfaZAjnlo7s%2burvcZNc4te9hPC1xauCj37Ph9iy07ESSw%2b4/bSOwgT2HbhUWtlg8raxloQwcC5TJB5ThGDkW5YJ6YmvMoH%2bbDexdE7IFpIaoYr9N2A5xJZVg5W%2b6RJTctNZY0t49qcW%2bkZvDK7crlCVD4yGuvVxgZwAcjHMMbxuwfqdCQDb9Tg67BcQHDmwmml6NYHG3QGnHbSbfEl2ahFPKEF9jwmkpjwnOYLuyq6bAo6d9lVO%2bI0WxogSH0pga%2bQUXlx508fXvSfDAYxF9LeSSWVRpvvDQM7KGRv/aMIm8xtncx6BL1nfDk9tIX9hmIW/6Rh5FIh2uQui34GEllo9WEGjhHlEgKMnB%2bX6RbgJ3VgCnb/tdCqU1X9oMAd44GRcl3YRM8gFdQBg1ok4%2biPQz6P9PwwZjcysMb2AhLueI7B5WxQQtr4%2b4XCByOljlUwROA0a5ebU29O6lAe6Upk7FpUbGj/GIp92kgnxz7jX94dWFRvM0uWYQpNNGsvmb4F1ZeV%2bsGjvYCjOMV4EA%2bcDtY5EVaPua9OtajMo10aCT1thsl3t1kewfjcWkFmirRQfPxcgpJihFHmPBLkZSmZWPu/kYmTMwWvdtzFdk4/WmTFe1gvnaQlFM4Lpk3s1mRzZqjin8pO0TOVOs8p5UXh1NHAHvzThrdmOjiYutgSZvkg1fxLEEO9qMMhpm/S5Zi2w2FPITuLNFFLhzPPbQEmefxm2dYLkSxn97oK5KURjgeOFhr5NgKPr1GZZFD21uNooeOvS2L9XuM1su4bfbCO05kqor2nZaP1KOs2bbpa6BauPVu51yGxZZKmTuoK3rStOBFA9ktuSLjMeJmHIxfE9%2bhBLo6cTFMUtH18B%2bwILKNtotB1deC/DSy//or9ZV8eznf%2b2/%2bCMDdyapPvPyN/2K43TvH%2bx5DywmDBFq3WG9ANEPyg8O760tJuXGCM/QrtXBbCtCkR3jlOfA6XbFVU7kPnytk6NzNkDHpS4eWDK4OioxbwXInhl9qfaWn/mtjz/wQ2/WU/88PPY1gTsLMdnf8Z0//4P7%2bOgL1xMkixwp2ROWx11W8JgkYbtgDljrVoHZLpPLLPjLFspJLBZqi9SXCeXVRYLDsiUd6EF3JVn5o7aHvVWC1wtWXQEu%2bTFeyY3PureS32VxMDvRS57aOapHuSWs%2bikWSjrM8Q0XC/zBDTroA%2b8PQnwuN0z7JmhwlV2XiLyR2fH1jf0ebYie/EKML70/gkvwrtFNlLccOALMzc/X9Wd9Q5uP/3%2b7U%2bPcwsbNfokLFPxbtTx2PnZwrVXi9NhBtV%2biKjShpKZU5o6FEUvyPj9EFV6TQiPvfuACuo%2b1kM5KbJ8PkYwL2I/VEgqiBV2Y1Ai6DjzuNClNE2c5ljPPTUKOgq1m894M8HVnbQDDH7P33pVdf0JwyGTQ/Ekg3/yxyerryUj8Ub/VLLybbPhmBO3k9waIM4lJk/dkI0KfVQP81duf/A2jPD1U6Rz9yFp7sEsjBT0kuI4WLiLG68jS%2b9AHmfWThYjMLwF7hls4Res3q8Yk9oWlMMHrNY%2bUR0P4MW0fa0wyB4OAqlcLs1wt6iRBKGHxEkiCKt1l6sUu4lILyBSDY5TTXUR5jgVcOLWDpH2IIN4HfRnu5EYX7TQbSNqv8TG%2b3xHJTHcxQJyTQkllDqTP/5Kxf3NJm5tO7aMn10oQf3YSoXbU8vGkr9RYIhQHGe5iddE3JtNxrJUkGfruqqPGbJrDiiJ0vEIkEZuJqVJMSsMWbziah9hODWgXfTyTL%2bsOwnAhZ5ukWl1Zx6eFbkRLL8DJClz%2bXI1rv1fgKzdctPsVOrsAC1HS8jF9IQBrzvB9L9xgWMN8IwEvQfzDmdiOEXSKIDu2ULN9WZ2JMmuC%2bUuxJLmGpyqk8wrWjovWKRbHoi1Zja1zAZbzEud2Wfilwta2A7dro%2bMnaIUO%2bgMXW9xcS2VhFuax0E5oyag7ik5WwemSgQNaSQW/y2q5FVYhtbPax4u5JvnzOqgLXiy1kuA8VwngOHEwmxW4PnLF7Ssd1xiPSrQjynAydFsOhgcpgr6N9GYFt8eKlMyiZvVmG06nRvFKBIssOhfFG6n8Dp9IzTDsnMok2ZRnrfp1UXI0CDe38PgZH86lVJyu8rLCnX8VqUnB%2b3Kc7wb4yDfHePwhfrerOvvMwnzBytumkBttF6sFLJqsm2O6CNAKqfMOMJbiMEus4h6iaGYSBvWeUrq1CeCb93NO8OqlAncmqxalerjDxizRvKReqLwvQb3YEJqoR2i5CEMqmtkMU5Sgu8nJGFosZ1JoKa8oO1HNec9nbovJ%2byAR4VNO2fT0ai0JkeEU1cYW8mT5pdyLTiQnlo2qg6K8RDYasuadWHo5BOsFJXQnRoJMbM2LPhybrHsfq2SGyO8KiA/9ExY%2bTueIgp5csxRzynuyqVhkJTrccYo8ZSRsfNvXPqqUBokpbuibVe9tFpENVxdq4FerlWjhdQmw4JpqrQKCiQmcLbPen0QG7XKE0qFkSTeonANmK8pDLZT5WLTxzfmt7/2G72UzhelP4%2b5Dr%2b1uqRKanq6jzbpkMUl%2bQ/ZJoE2ssaQbjVnepHKrWfQomaHEr8Nwn9gxq85dKoqH3CnWiDOV3NC3npIYvr8pDsWE1s2CW6Jlp/Snol87N1S6uZKN%2bqph2Vljwkz1pmJrlpBIoOQJUutjSccYzhOcL22V8U0SC8u5gywtUboFcrcHL5/LPEjIcvsWrxTYZY2N02px2S0cvPSqhz/8zN/51vd/6IPP/cpP/8U/lh78/d/2v37LJP7gd87s931TuL16YH0xzP%2b6Y1%2bpXAvpJL1qea37s3GCJ/5S8cCprRrXyzY6fVvq1myFCbqUT6XAZCcQO%2bwzVYlBUKIT6iaGwJ0ymflRDffVV35m/OK//Gdf/O0f%2bK236aH/zj79NYE7r%2bq7/%2ber//v3fPTi9z7z1QSTYYowsJDEFVjokA4PRy0PhSlr685aEhafODFsFgq7zQTVGpFj4bVlgttVhIC2O7WFS26MV/OWLECeU%2bNYhJ%2bWJoweMI1LnQA%2beKbEMwcOvv5sgadvuGufdZ7bN1ws8TQ15GZ%2b5ELQ4NJGu85OS4vGrX3aHQGPU7u%2bvxJbOTmMTltIFE5QUoq4hnXdxc1ugXPiZnBSMa250xLxcS3caitQv9kqcYGvBXCzXeFcauG1Y/Xr5vHgDgu9ANW%2bzoKbwD19/gh%2bdB3z3MX7H7qI2Ooj2lthcMZHNq3QYTLdpRj7ZQC0Uwx8V/K%2bqKVtdZR5J9vQk2IbDeB6Y59km4zuZNg%2bxdVZLdOaQ3modZOsf%2bcjvA%2bDgF68d2exN1KadZsYKdNd37wJ0u8FcZxghVWfr0G9hE43HV5k8jeMfTJbe9YquG/er/pNvZ9vZIVsk9BASUzPar5L%2bSN5DDMB7ZH/OoriIso4Qd6mdn1ng9ERfth0GXUoOoa6yJCpz/0j%2bb3wDxEW%2b8i8QwTFvlSuk4ptUiXVAHvCaLsSW0hKgtSvwkKSUzYzxOnlNoa9IdpHW1gy528wRD3bkc0ENwJNP1eXJBuz7pidDp2eIxN8XDqwKKfh%2bcrCIyhYElnPjsnQqzc7n2j07WYoaL9g44YRiv4E7njA3QeqKEJEL%2b7NcpTNPqxWvXvjwPBWoH0TsLM8OK%2bDgF3GqsEkZL60wm8F36GeXxfSWRyjG3IjX4ElyMm%2bEFCPblh47ks%2bvvKZJapFCEqJT384xvKFEDvvTxC/HMg8xcOzLXz5dWVuVU7DQW8ZJt5krPPaqbemDiWYw%2bKOwB4Cp1qopzWiiwVyRtGoETznCUsfXrSRJxVJWAzOB4hjbtDVyeH0nicLaF7U2NujPZ4WAOrsOGoRaADASZBdp7PZqJR%2bw995/oeHrOyqdry3D3NNxnWBIHIwf10Bt0NryBBIXmeEjk48NnAnh9epEd9yYLcs1LelignqxTGQd9fsunyRJJeaZGjRrutmSgonGVmDhveAx3nt1KXShvSxFIdPh6LpFqv%2bMMG3fbeFp77BRtevsLvbwqSwsZikmNOxhjIw6Tt61WRQg3AB3wkwngfY6ubI8hRJ0pHxQTgRRJoHodGYHloRK4aekAaqDdfnKZtZJiv4fgthuURNXTILhhHj2w76mGJa9dHDFJO6h66n%2bvxGXhNaDqJgImC7hFbpjuPGFtISDXYBaqg5h6o4pEPbyw0VAL3BZ%2bkS3UALzBD0EmxnlM3Q052FA8Q%2b8CTaItrytaWqjVU%2bQygOM%2bw0jry/pN5%2bw%2bCBbDsZeNudiytNc3AzYQuA72Kx4veppzydaNjm1MHr71rUidr3k7DPidDFd1Q/3khK6H8vEh87VicaSWJtAnD6vo1lZb35IPPOI5YduozA5j9pP0ZOOC6ccihAvTka4s4qRmh3toW44RdyjaD0kjlUi7k%2bt5hP0GpvsPDyZlvcdWKx21Tg3hfQzkgP57NNsqlCwuRPJovZlJ/QlcksKybBnBXQo9DXRFRJUDXEHyP/clmqD2Vf0AqvStZIcnjRFclMnHcReXPEUkxJC1GxOfT3nsgHhcFfLaU9W50OVkuSGRoxZgSA8hju4zhtCjAX3/YV8rol80VSFWqXSJzGZNPUwmzCfs3IpkafxnYL%2bWSCxTTEMFMp554PbDPqaOoWtE55%2bPIXcOv2cz/z3t/%2blR/%2bY4H25h6SeX/t8q13J/Z3fGc69eBQZmZfffnB%2b%2bcHmH/12eXyBm7e%2bc4f/sC3PP6%2b26e231OwRlDXwo6fiJy0G9qYbmmxv/vtQnBPr1Plrk0gAAAgAElEQVQjpCzI8IGLSYFbTojis9Mvndq7%2bsu/%2bN%2b/739ad6I/h7%2b8LXD/yA%2b%2b/NMf%2b5uX/sZnPptiPk5RpBVWgQ1nHMgujju91U6F5dhWkMoFkRZDd3yEXo2rVolHPBevLRLcRoRHphaubXPmsTA6yvHhCwU%2be5s2e1oEhh3%2b1J6Po8MMHzxb4g9uORK6atYUDooPXijwzHVl1zko%2bK/x0l%2bTfKwiZuwb1zps6eXrtcmMSKC8qQ865xlKs1AeEKASUFlw7i9RXNMqijcFpOt13mhXwqZvHreCCqeZOWrwI6uZXRtpuWxOAN4ZYHfqwDpbop44qA8sjCsfyReHCHqvI6tCTKcxnrz/HDqPdZHMWBAqwvRCggeKAL1eAUbw2Kk9Jp4wFNbSyYW7z%2bHSl448MCW8N89tHX4W%2bpL%2byTEG%2b1p2lROFJiIx7g0MVx522poJ3xh5lekATkCW%2bk0o1HsGhn6D/uNi%2bbWsFk0m0AY3dfeHrd%2b/4n1W9pVT5HqNbHYfIeUwM4n4MNy71eYmRifOKXroQ1lcfZ8uLQTraXUTezb1hMA0YVKQ1ohX7kEXieZIKWlZ7SEzGvedoBYP9%2bV8B9t%2bKew7t5wySVPa0j2GV%2byijA4xP95HNThEON9D0TtENVbAr1ejE3vA9A7bwlF7jPbxAKvA5FTwPpgESG97hPg2pTSQxFXnRgudPgt46LkKs1M5sCkZEL2YPnNyPXctiRuLLH0WWfVGy%2bSKPzaz%2bcgiMe%2bEoWeW466aHnHPTTf52DL%2bvgbTvsxZmU795yXxSrT7b5xZtU0qSfCsjnrw9mcCetuBZktLLIYhbVY1XFYo0xrPXvZgP7/Al246KK%2bHorH32zUcVvA0CxxTi0PXwpdv0qVAW4VWiigdVI9lsF/wUT%2baqS6ejDyBArXyaQn7XICalsSpBcsdwjrT0r9pX8iiJ%2bcLVIsa9kVXLBAlWZs5vfcDJSsV8iQ4rBq2X3Sfb7x2kXNxSpKqXHqd/N3xbKTXKgHpBO02q9C%2bnsH2LbihjeSWJZaMFkkTx0J1M4bd4fnuwIpqYdTRstQNhgRhWMN6Ub3WTw7jgmRXMqc23vL85Z1nAvGBb78jwejZENE7Exw/HWJB56TTKR4/XeD8B1089SEHvW0HdaHkQJLS3lHzVnjfad1IcoT3OIhmiOM%2b%2bp0cIzLrrblM5rxjLd/DdME%2baEkUZrnsodU62aSvVnSSabTJOl7FoYfgzNco3apsoc350Gjpi1UMm/oq45Qk7qiUcZidU5VMEUbbQoaEUq21lmqatFIMWz2z2eK4nAmobwgQ2ux1XIPyKF/IWW2Um4JSAbwksPKeLVBkZOr1tS06PzSj0NwGLXRHdxJtt00gzOTWlktW3YB49uDNHcOGhEbGCb/TnqIoaVHJByyssjlaPos50fObUY0eXCOloVtLXvWxSqdoB7SVtNVqsuohSefoRbUAz7bnIC1HyPi5zB2Qc7CQixf7AL5DOezJPREPeGOD%2bAb%2bRs5TZTSaGFpjRXeVIEZpk1E/iSq4RlYjER/DVbONGokmE1lta2vdvjyDyYoF2Og41GzOaCNcYjJX8D6ba/IqneMaIM7%2b0Ouqm5McjHBNHQH9CsjNSmiIv%2bm8IbUYLbDl85UvorRNAbp%2bTI2V6PMNUDcMO1/DZ1loaTaz0eq2JbGZ0hj9lBpRW/M30uUKDq1wm4RUWnS7jjjEEJNxjDEnUfTtLHNRuygKC0VSiloiXdXCuN%2bKW3DrlSSm0uK7Zgb3WV%2bqQ3O8iDvfIx5%2b8h9MfmMr/YXv%2b9cF7s3cQgC/XB6KELPNZNF/qBVFn/yGH/%2bWsx/4G3/3eKf9nqDDxGRg20skoXvaC3EOuebDcDPE%2bYTSmBL40EOsc0GpUo1X5q6sJ8987FM/dvHCzd/8/G/%2b0bX4b5yB/%2bw/8rbA/T/7bz//I9//3U/9xNNfyDCdJUg4odFmy9Xy2XtzG4kdYVYlsrPjQtNd1FhmPm5aOQLXEr1nmmS4XbXRdmrQR32PWzsAh0NmTtf4UBTh6SzGB70In0t1V96ofD8UhvjDLBHwzkMWQO4yzeBpQPuZyxGOHosxOgIem0S4vBNjbxeYjBpBrYKF4roD90KpP%2b8rUd5mkZuGXLXh3k/duoUb3QrnF7qtJbMu7LuRwCTXgEv7Nr56VOKxUzYuH9Z4dN/BS4el/Lx8VOLhPUeAO6%2bfYeQHth2pUibOBbQ1umVhUvrIvzyE17mB0vIxW2R498VzaD/aQjYrsXcuxLDlwO/GeLAfYOCnAk6jwJFNVDCo1Q1BbLls9MPcsGMb06ORfWx1ckwOE6nMOokJ1CU7TCQhPISxpwbU0il3GHvYjjJU6QDwNWmTLOVdjIq5J83yw5%2bjlYvtVrYOFTd2bpuAfnNo8HEmgW610vUGolmLDPZWhpH%2bupYy5DzUfUE3F%2bIMQ1DARFP/OpLZKfTDht3RhfA2nWHQxQwd/QwuEgwh5zMB90gTbLczaRvlwC2kLRZbou2jLhTaqjpsCtpAznbFgrQB7oV/JDr3LDhGMd%2bVsHieEEDQQYXJpyK6FiBd9I7gzfYl3M6Q6R33EN14T6v2sopdRtfpBsToN6%2byCvRtTxMt7qH3RM%2bNx4KFmiZbsPmlsjHQEt5y1k1j8g%2bCdGa8EfnwoChdGxWl%2bKqzL/DDHcQbwH3T%2b7i5hycbos27%2bsbfhbnM1fNezvtNgHuzwZTEZ95z6i%2bXmRSPagrr8L3qVtGC4%2bmmoix90ko4vFrjynEb/aMpvnhgI78WCjvvEJ8GKkHi9zMfZg3gxbPPtBG/U/ZTjshpqksbIJ6dkjKLaAGrtytg3WkPVVaU1QLkK64qpvicfExpoXW%2bAKWjDx/t4qXBMR63Wnh5t4DgPPkydqa7p2KC8eRaJhFMiyCbfUbAO7BkYrzMtaoRleTfwEJ9a4k6ZeGuGhaTjqj/vJkKmBf5izjBGOkLLUqb5NLG4tI48%2bp5myT0usK7zgRIqlpqR1SpLZWAOUUzaoLTCR7fL3H%2bQy52LrLulYOtM7bM85TFpLl6ssu9NHkdebVCkvRkLGncS3qndj9aHZpk3VZrgTRVTWzjVMTXrFYK4AW4twjyughDCjb1MzgX9nzdNCyrFsJqKXIZ9m2OM2VZCZ0VsHdYcIkb/3iGKuxqRETA7rYCppA3ysJi5cCuJwgiZbabUSfRCG4qWeQKNuaZg56v75lnS3S8NqapPma5c5Ti%2bMKkOhsOq69mJ9r2piWkV/B8vRkip49l1rjRnHwz24WJrqFL/3cmy/bRMPAyvowGXqq6kvhwZgj8PmLRv/ewoge831eJkEkI3xzTRIZ8rcpsmKBKxp7tQ%2bnFFJ5Nf79a7CU9Z0u83yerQJ1oiugu8H7XovEmyF3a0IRQolakzLwUzaXVZKBzkUQ%2bEtHNy8xW0DN%2bS5xqmGs3j3XW7oot6N174mYONMoquYatXonxzFMZoQHB1hp1NJuRk9WO62uvQ2nNyWPscVybZktVCfAzRzONppEV1peaomkGwDcbGoJ4SmOapOGI0piqb9j2hVrKmoU1aLdQmcgxo6xpQtmMbhYomaT9Yw1DppaFuDQRc4Seg8lyCTfoIV1VIp1JY5XKJBOImYjr1Ehc2QEjQIVe4KNXZcgCBw89EuB/%2bbnbPzMY/cbf/u1f%2bdOxTfyW//rKTy/37/vLjl/e3wtZnI25IjZG/QDnK8qzAeuMK/2U9qz7k1Q86c/va12KOKnxtO2j99ICN/%2bvn/zWJz/0DX9sSc/XXrn%2b7D37tsD9qW//9f/8E7/6H/6df/xLxdksXSKvLLiTAGmWiCXk0o6EMZshliRRLi71He7gatyqSzguMLgT4KgCxnsVlkfMawa2930cHef4QBjimTzWaqPCHpjFrLLwdX6Iz7HOraw3phYkOzKTwV6OMHxEn9t/NcLxo7Ew7A3JONjRgkmmIrD8LG%2b6cB4o1lr1okkqvWmpk0wFHEQVLi5d3CC7vrAZoVSmney6zagAz8XGq8MSj5zSjvPqkf7%2bCkH8voMXjzQJ5tE9B68M1ReVWte0AC5uW9L5RLHo03rSxeIzQwT9G6jtCNN5hifvP4/WIy1kMQcXwXsEv%2btidz9GqxfCC1Nh3IPCkQSTqKU6PWatb7VyDFda3IpAnN9DILrdztdgnX8TGG6GXLeiDMOFj0FLtkUYr1xsRYVkwauYQ1f1SRxgEG4kipmVZrgkS68gihPStG4Atpml5b38TPrr6lTVzN%2bpP0FYDDBZuRi0mCDlm%2b%2b%2be8CQsSMr3hRkYjP2Q2XWG8lLA2UZ4p8xDA4F5WTcm0VxKueRyeM5boJ7ej5/ZM8RpI3ZrNYD0KtpmHH99CwawY%2b1simlXtS2MyGVUhleU%2bYfw88osdA2q8Ij1LN9jMM72M33JYGPTySlBbc/hL/YERBvzffE0z0pcx1LskY7sAaU7eyymgaWITDwXBzNC0nM5BllUm11gv6Mbg06flaV%2bgzXcYJW18dqngkzT%2bDc5EC0vUp08TaRbRPC5uQYBFJcqblJ8UK30JHUj38j475IXfQCU4zpLea4JqqwyhS4r/%2b%2bh3Hn4wwD05M4lu5rwZtnKHseyjsdOKdnyG/34OyRgVdZWDsMEQWlJFjRQ788TJDFLr74vIf24RzPvu6is1Uh4t7sKyF2PpRg8XwgcxMBfLOR4Ib4hVvGVpKbJ4IZ3qp8g41ngquw8SYMIo41lNyQeS/hXGBWV%2bNEwqwr41ghwKMWIG9FQ9hn2rBZIOm5CO67Y5EerpGgaxZsAmsXKL8aKkMuTkqqPxdG/WgI%2bxQlVEB5nXIZ%2bsRqX9UY%2bsk/6xXf/K2ORQ0LYl4tb6lF879%2bBE%2bcDRDzHKtKWDCGsFczG%2b59KebHFp44X6J4T4T3PZbjoUdY1bdAm9aQNVlOjp4TP3b%2bTt16Mx83QRY/miKOB4iihdQ8YDM1uRKUyqh7FMH/XPzXw6haA/eTrkaEZwC5IXwkWdqP4GMp5gYC3MnDGkcQJwzRxRSjqq/AvfmwoKOOSWyKeIqovQ2rHKPEFhyM4IeDNXPrYI5CCq7PTn5WfdHF033Grmdo%2beo2s0xpaaes%2b1pTdk9UzxYQ34fjTxHaPUk6FNhXWcKWK2OsY5F6dya2crxHLtlzgteTDby%2bsdmPakXWVqQyDlZrljoZHDvi3ELwNkdRDhCnY9HHS%2bQum6IVqPXiyujiyW7a1gz91kCSV/kd7YCEFCu16tzpOQnyXK2dAyfe2Jy9xeSw5uY36oA0bP2ajQ%2bwWiVoGckNPeJbrZbo5n16oJcnbi1NrgJZeKlJwmtsvtpIL8OoLc4s7GBkw%2bkJT1vJOKd1G9lw2k6eONfIWtOpMBw76PcKpKWp/Gc%2bN6NdrshaIqwWZMltdDvcPGp8mIWjqFnn99DNR%2b9hLUnBtLUUORJrUzhzZFUPEX/WXSS056JSlB64Df1v2cjiJRjRF%2bBeOKiyFWq7haQsRCrD8SpsO3zU2Qyx24UX17LxJ%2bNOq8g74xQjcQFrYa9l486iQG85Q7m9hS36z/R9vPO9Lr73P/30j334w%2bknPvnT3/6vJZV5q7vOx9/3bX/viZ1HvuMXRx/ee8/uUYwir6RKan/HFV7pFKXAmcoOGRDYaYuzr4yj7b6DCXOOAFw%2b58P6peMvlUe//NF/08jA1zrfPyvPvS1wf%2bD9P/UtP/6rP/T3L/9OfinPlzjKLZQsFuMD/qyFiRVL7hcznusDH7ar4ZrXrULcFvh7d%2bjjkAC3SNEm4yGTq5lkuFK7wL9328XvntaJ4CO3XfyL02QbVYu6dznC8GG1R9l5NcLRwzSZVM361i4wHpnF1yQpNySWDA4y7DdcuPcVsvDR%2bUWlEPRbr1Ffb0yYzbpWATdbNS4sHNzslDi10tdzc/LKUPfKZNJfG9I4WddIAvSXhiygows9pT0P77m4fEj7OF0jebWc5wjcCdj4ZgKHo1dcJF8%2bQtC7DpCZWRZ48sFzyL0ttE/FSOYFds%2bFUvDGbWXY7tAGSXW4pVcj9F0EYaksPquo6jK3nvA5bVA2Mr6dYPt0iJEA7ByTOywj2hN2ZLT0hX0fLz0B%2b3RQIYAWmMCdChk8gvGYgDoDXcYJsrcEZJNhaYB8jWHsYydUFMJQ3jjWz5aQZezJmYkkR6QOFaarANutHOPYlXNpNgn6vkxeL0C%2bpRu%2bKc%2bto%2bfIcxqEGSbooFvTjcQSxp1gfUwGXzYuepAtab5zgR5C7zqy7AL61kLOK2%2bN0MJZ0bennSMEwrITpA8RxvQKrVC0h1hO9kWWpBMvcGSN0MpZkh7Csvupvi8lkC/21Mec/dIkIdERJO8dYTvdlyrEWW8I53hbpFlVYCEryMLQNcZsVKmf9T3MSTsYmVez4WnYaQHvCSUowLQ3wWA2kHu2yG20A21rDqSEIL0VqAyGwJyMHbUoPMyCWHNxZPKpWfTFpSCjLpll4rmR2wAEZHQiB1lSqlnH1zj4NJkhWrc241JkMjz5jfc2gJ5uHGoR2WhINUGTfYqWYNrFFXxww1rU1PFGaBsAz89cFA5mLxaI5wWu/l6Jr1BCMwvgU/rv19j5cILFVwK49OTmOOV8ZdsIqYWnL3xzlzfZeD7WXCz18Y9lsL7iy09ZQUxzy1v5PgL17gzVvAe7PUM1o52gAf4l4Nzvo3w5g/OgJ9fCzVb5Wg5rMEed9sXTX9l1Q4cb4kIboIlhGX06Af1LPurHM5XANOiYuQnN%2b0xbN4yugnW9QDLrhSB4JRqytEKasW/RXccC95u2n%2bDSv9/GU%2b/JsX2%2bxpk9H50%2b2UlWOEyEYedBveyM5RhljrSw3U8xmfsid1MakeBlsIGoFhvJ64ZmtDvy9lm2QJc1QtSQpKmqg1VC5n2O1cqSTSxVXiz8JUnURrolblpuBYsaar6VSXytSKIACtBrtBmdaAKu4pBDy8i%2bQOQ2AW09UODHKb%2beChgLo75Uwm0WAcpmVssZum1GuEoU6CqLXc8QeZQ40DLxpGCTtJE3Q0m23UhImnsiwNOiHEfvC%2bsqiz6eFVnpM8oTtylVWciYp/SGgJ76%2bLp2xKFGtfFct6YoS%2bMPX7PA21zcZpY0%2bDcAqE07Rlqj8jmvuwa5jZfAKl0IQ09d/HjZBV/vWBM49hbSfASfgJ3qKydGWraQFyME3jYS6tK9SHzgqYXXq9FFU%2bYsU601LU6Skvm872ikNC2ZExebaDI3dMamkXNUK0TMCVScazin6cTEz9Xos%2bYLNEz7XZKjJm9qvXEyNgk1sNVX33d1H9tML9YNFCUw/FRWNo2XC4StjlR9bY6s7hhbUBoysdAI7SDpw14jWL9O24CJp5LvYd7MaFC8XIqmnT8bDb30TdpIKo%2bhm1nq3CnPcxzkGT3zQ6RFIVEu4i6uM4FrYzRfIaLXf1bDt3pYLXMkxGa%2bhdmwRtQh8aF2rItliazVx24Zw4tcODshDq4s8X//3N//1svP/OifeKLnd/3Qr536nT8Ivue7f%2bRbP/b87QxFXqAbWDjqBThd5thp15KQyrHsPBigdzNBe5vRN0vWx9fvVEJQUcI5HQCf%2b%2b8%2b/WPvf3z0iT%2br1U7XneRP4Je3Be6PfeTvPfHxf/qDv/p7v15fKooch%2bOFdITxmF61mrXMUK194GO0G4vsJZ15Ali58xslOR5ctsGt2uUqRdfWYNR73RCfLxJlu1xgdAzsqCOUEFo8MQLe0QTYNrkqBOgE6ruXVQbD73jXF1O88BRFn5BiSF96X4j6ugvvgq6g1K87D5QoXzcA/L5aZDDrMctqrgbI34pqnItVWnAUGG06c9AyB5eHJd551sWLtws8dtrB5TslHj3l4qUjlv2iFZqLl4aFsds6kS02ch5%2bH63b%2bO/CgAC7RroKkeUZnFdCzOdTuN41LFML73v0AqajFQaP98X6b%2b9sKIuj32IFQw/dXg6b3vUVEJYWcpf6YzIuNitRAT1lDarpAoNTochjCNK5Ta2mc9gDTYYRR4LpXJ4rJ3PRvE%2bWLgaUiyxVPiO/G5Cs2faWsNy8PwTX/UZe08zJZgUkKOfzJ%2bDesPHS42r5TGXfVOsq025tyevl%2b4QRUhZNNh7rKIICTfaz6cpTv3eTDDSIyo1Nh46ORgbUbAKmjDbAwnZUyGvzBqTTei8aIVjurLXn/GC7tpGJDeQuJrktlVEnqYMiPISX7WPbr3CEIaJsXxhip2vAu5mNi%2bAQ1Wwf7tYhMN2XAkyMLCW9IYLZzrq/5AM%2bv4s0LwWwLugsYzaC0mQbXVYt3XQC58agGcSSbGkA/7Q3Qn9BBsygTtvGak4mn%2b1co9XVnrmc55L8zIVhfdzrSmTCwYuZScSjMwpfXzqQ75luo9qwr9ycl04WJcp8DNtuPPjJqGwC982NyL3AnfUIttobcl5ex50OZv0ZBgHt82opwCMAnh7fVgXPZ/0DT6KAlCpgmOH21QqvP13i%2bWsOypEvuTWcp6Qia8TNgoaTCeBlbjJtwcTWF2gz2XRWs2lvur2w85s7EEGJBth/VcdS/VgO66se6ndksKilJ3sv4N5o2Qm6qa/XwQnrZfPaFzfAuMnBeNO533jha%2bfQfyZSr2SdoBijOdAzUrAubUdGqxJbNgL1eG4h4%2bN8WS/FI2cqXPwGFx/8Rgt%2bJ0Tfz1F4IbJlIi4xDfgX2QATUAVgKChRoQDTNTV/xPReekGYkyKw0R1cJYDe2N2ZWg6N5l2ANuc8wxKLFjo2oN3Y3pKtp0RApTJKYSjoNhBOEJlKGByRz%2bg1CrBjISCm/RiNptwaSmmYAIpt2GTSywHo7c4PXsWaINtqMZGA57IUBpuK7AoE06qRZqE82TmxqE%2b2RNtTFr6JOnKzNksX6BpG3vGmCug3DsI2Pp6nPbSjCktK5TYKXzRVOYVFN0CMn7%2bMbXm93HlJcJ2jlCTWTXZeE2uV1dfZZCVsO4s6cQ1YYLLsrRNqqX/3KbGRnBMbC1YG1VCfuNR4zjaWDC9LnkJjlqCyJAJ4JrXy2/k7o7AdhqQrRr/4HC1r%2bdxKfg/cVJN76VAa0pkmFqmMjDtqwJPY9IlAIxvLlRRSYnRG6CbDNPAHGfgmIbzZlDQJzo365e5W0csy04Bpw827UmOrV4lX/IktsrZ1nzIZKhDLDlrGbpP9i4w6AbsMA6uSBFQB6osTwK4Xp%2bC8mRP5EOdKKShokl1dhw4xZPojxFUhkX2uQZQsNz/TykeZLcTRLJ22kW/ZsJcJyOesOj30khlmIoXS5O3tKoYf2Cg7EXp9C//8t5e3Xvz9T/wHz//zv/5HtoF807npTR584i9%2b/InuN/7gJwePeff70xRWWmK4FeJMlmMr1ARkjmWSC6O9QOSG9%2bUqweUcfThi8SoP/raDVz6bX9158Rc%2b9Mk/JTnPH/Wa/m297m2BOy0hz/zUd37qqV%2b0njzcTnA0XyJZnHiGCmi/HWCyt0Q6DoVRs90K/Vshbu4tUY6oQ60ki/nlKkPPtjA8AgZbCjwIzN81ivCVvVgA%2boh6dNR4bNTCi7sxHKvGw8MWLu8aDa5Z57a2LMxmXCoJwxRky0QokpuNhFNq2K9vFP4xo/CgW6kLjFPj5YMKgwctxDd0Prt0ysGrh6UMxocodzlSMGXyOu%2b6N3xc3GhkZAGXDny8cjZF95aH%2bIyWLG4GIicJmn2c27aRo0a%2bCJHQZir3sXp%2bBDd6HVkZYrpI8F5JUO0gW5TYuRBiRa3R4yV2WzXObtlwkgpOZCEoLVQefVBttKm/W9NsrAwyR9XtCZi3e6rdJNs9ST3YsxnQZ6UVbbd%2bkGNESU2QYhT7om1nwqokwKhKSAf3hhyHbU4Qr1wAgbQy9XwpQTFBuEaGVYsu8xEXdkpiOgr%2bJytPkhWbyfHeiXMrKjEWsE1LNQddI9ORCqYSCdCJUr/HEW09pUJN1KGZUGUTYDYrBM4pK54u91T%2bJABdT44A/5j1bEUyw8%2bWdFNMUhvdwSG8ZEe8cAVwrkGQ9kMy7uV8V8jrzDtGPd/V9jP9chYeIlzso%2bgN4dMlhhM7E1Zn9HxX4GQZdjSgtpcJqHBlY7lMaWenYuRVQb9blaULGyuuDPx/TvRczBp8ZFrTgD0yOsvUQYtZsGutkoyWE4bdLBqb%2bW7ah1XDKbeR8qBZip7662n4/k0Y9%2bahuxJSmbhnnGT4UXSQMcSZjC969FN%2b1BRtahYuKenNgmLNNCDhOO15jYNDP7RVh01pgRcJfOKY8/0MflPMiRaEqwrZqsbt1yoM7QDll5Z47rqD9PVAXFvoP%2b%2bHDCtrcSEuuKJaYdSkIRVsC1%2b9mePdFz08d90A%2bo2x3rxOsGfTEBt7I32pSmx0leZ3mcGoukFzbDhaNWxG81RzP8zfcm80v1yPNWq38Y4zngB0BQz6NBdqUfykqpQqFhWWhS2Jpk9eLGA/1cal3RoPPFSjatvYa9Wo3Q2wbsaeOMVQlsVxJICjkcgQXOoGhmW9KhAwzmAzn0Su2cjXrC6W6Vw%2breMrhKezqdQqIHNKhZa5nrXWnSSEtKC5GKkDoKCeIfUuK7k2zmGbzbFulxp2QLBHe88EVhihW9Flpq/gfaWFmthGkUuh5hQZBnDLiXxvgT7ceo4w6mK1miKi7t3cPv06mZHWmwfOP441F2tJhxaTTGb12ljkZFb1GujY1Hbb6qJlbqLjG1b%2brmvQjrTZrQi6xTO%2bYdFNBdemH5AuaPZtjZDLNZKNomDSbSWJspxR43QhCasnmZnqcNPyVB6iYFc3P9S9MxmVV7Akstpg1JWMqdDxXSnuFLjbWBhA349y5FKRdYW8ahj3u%2bHIJphm%2b/m2WlGaPFezv9UVQJNbFbyL8xWjFMUQpbtz0nfoAGQAvMwjllbObfZ0DcfRfMfWQC0jm6G4OXxlP2COE9B%2b8timY5v0XkpS2m25B2TqebRMsinZddmEmWHP1/jtDhJTZImtwqeZtLyW9TkO0iQWyew8dsXVS4gQo3IQ4E5b4tqVCCOLNBYJLbxJ9teR4X8AACAASURBVJQ4slvwllOh8Fm3omTbbPVxXytFyQT6foTTnoWf/adXf2NQPv19f9Is9ke%2b/ZeeePn13W/7K//4ox975f/NkEUOVlWFc2UpieX5hUDMN5j6cynPVSrDqvOsJN13pPru8awWC8jxa%2bXVa7/x%2b//brc9%2b00%2bc3IE/37%2b9LXDn5X/HTx5%2bKrux%2b8R970jPpocsB59qRUCT6DVkme9ZIEVjxO2ARY2YweyWyIcd2AGte4D5Sy6u767g1hYG2zoZT6cUxelERfj9%2bHGEl/YYYrLw6FCZ9WaGetfnUzz3vgAPjyJc3k7wzudTvPiUj/oGVee1uMLQa12CixdrkcWsd6yu2jSeX%2bguljCEUphzTGgxFenY6alJF536YYlLBrQ/flplL03o/t4uIWuTmUUlJakpR99MrgSr/x95bx5sW35Wh609nH32PuOd731Tv1bPrVZL3S2DwRADBkUJg4hDwBYuTACRBFwWkHIhIE4qTiVORDllg51yiDEgXGX4w65KIJihkLEkRIxkoZZauOfhdb9377vzPefss8/eZ0%2bp9X2/3zn73n4yLdG2Q7RVrfPuGfb4G9Zvfetb300PgysliNMvD3UQTccBUhqVZgTuR2h1X0PpRBjHOd5x/Qp6D3ZV5z6izr2D8oECd2U1esM2Wp0MfstBWHsoWxWKwkVIrTtHpEEPmMQAQbu8KiOE8QjVgCFezqMT%2bdyZjFD3%2bgvmvT47Qz0cYrWtSZri%2bHE2BlZ0IJdBrYElpGS1keeIE5axPqOE5SRRtxPrVsMDT5i42pvL4oAbFwiU4PAwoiWXLFMFHTY52bIelOgM2sq4M5l1vctkVsvq29iGHV71gVgGn%2bCBi4qxOS5bRhodSuVTRg3GUmDpGGGmwJznQm9mQrYDHGEbG3It/Iya9fac8hmdnNmAivYR2vkWshZfN7Qq6uAI1XgD3uoB6tEWSEwJW8Iw8eAIfqx2kzzTfHCE8mxDpBHsKwpJGF43AzCTUldPUJjiTARErFBpF5MELJRwHLZHWJ0MBSuRfTwMTjEcsdAJZTQjDGNqVm21OQ/xSLXvC%2b0sQfkox2CgjkO6qHEwGp5gOF5Thj1mCEz30dzs4qu5WGWbsEy7XJVNSDVVdfmeJh7r6zmm3U6MBPS2cuSCwq9EcdIfDTAZjtE9HQCb6vHNSZORrX4QiQ%2b2XYTQEcOqXFh1OJjnSOMaWezi%2bSMP5R9MMFgHPvmSj/zlUBIfA3rHs8KgcWtYAHnbx01NCVlsuMDTtwoF83RwkYIR9iL0Vf7kGHkBdH%2bh04zgBvY1ccRpoAjUeOxqG0%2b%2bmuNtV31hrPiVnOy5EN61TMzivsJiLKnWGgjumsG5u4W7V0LcvR2j3Q%2bweVeNLgtK%2bT7CoIBP/TqjhqKZ4dDiL7zY6a8%2bT6nTbazhHGCSxRiEA3ntBQS3/G0sjKBdCNpbxJ7QCehBbcwCDAjtWOAuScjarpOkh45NSDVtggtW7p7OWy0/gk/PTkczVU4yHyvirW42/oMLGVMlk/dm2AKORqm0fWXdNRLR9WMUonE/W4D3MBwgTaltX5GEVf49TehIo5r3UrTvE9G6U/MuQN9q4aupPJNeq4MpURMcdFodTNKpRIvkHM0j1dHFFB2xk4y9hkVEwsbVmMpu6loYT3ruSEA9rSU9daPJCdTlGMZFxXjBExz7Yis5gOsyKbWPZE6d/sCA%2bZ660AQDo6fn4sgeUccs8YU3BaJoJel5K8q%2bOx7a3kgqtHK%2byPJTtPw1tLwERdkWvfyg3UIq0huV2RDoK0tP9r2HgHIbSwBJAWqV4DBKoPMSJUxWNqO9jRp4auGd/ARzZw29SEkKdk2SBHwOMtQ1u5BRj6l07fwCyQJ2gvozFhRqIKjmovji/uSRGR95AvgkjhH1qLOfokOQnkxlbjjx%2b1gtmGhtGjX7GUmLro6BVirDgkv5PEHldDArlG1nTgRVXxyrLHCfMY9Kcuw8yVGZJaXWfJgVSDiRu2p%2bQAVWy/exsu4g4eGHEf7Mf%2bzs/vhfu/FPPvpTb34ho%2b/6Hz79o/uHV78z%2bPLVd/D4WaGgPd1xsN71cXmW41nfx33zAs8ELXlOd2c5hgMPw7zCsxPgMHGwu%2beimlavTP/53/8vnvzID7/pcp4vdFz%2bd/X9NwTcv/5HXv6p1b94/c9e/ez8saNDrvK4stPEiKOkQKtVIR214dJSiJr23RB7mxPUxz34ZK2YoHqQ46krNcpTCHDnhDOg48spcP9ZhKc3Ezx01MELa7Nz4SFh1HZ9OFd1yHXEL6pGRV9iKYLko3U9R3nD8ILXa5Q3zOr1mpHF8HyNHRz3cUskMQ5eOKzx4I6HZ5lcanTrnIC5Ua7z4Lqy7bzOpt5Wxvzz0tzzz0uWyEB020d2qUC872F4pcTxax462yWu9FwUpYOb0xK9lJ6aAZLP7sHtDuG6L4E2sm%2b/%2bzLy9iq6l2YC3Dcu097Ox/rmDOlahYHvgY6NVQB0Kg801WjT8qr2MB176A5LkcooeB8DvUZ4dAHax0gwRGQqyi3mNJOcpcsLM8o1EmOM3YhcIyc8BflqxyThbGbfd7S6pmXjCZjJZtuiRjwWATNBO4nGefdooSsnaCYsXO2UOE20qIQiLsdgFJ3IlAfVjb9RWY6mMVNXT9bfqA6UYZ9tIosOjT%2b7/o6afkYWOGjy/AnMTTRdEi4lKpD5UlCF27jwsR7UGGce5uE%2b2tmm3CVm%2bEvRpZBRFQetwTFKw6qriwww7hwiGG0hHx6gTZbd1balU4yDeVmjdCsB7tG8xizwceQeYZBtiMOMVvCrBJSL84xxQlisH0A/cZ2MqZE1O17cI13ELpNLmeBGD/gBgb3kWlrm3IFbuQLS%2b2OCdIUPi9wR786gfWySVHkYy7LbaIM9iSZwp6yAk6f60StjJP3Pgj%2bDe4VpalpGOjU64z7i4dIa0IbAe6cDOFtjCav2W2QvTTTBJNUKQOs4ksgqI4q5l%2bmkwuErDqYnBV7Y7aB7MMZnX/VQnmr7FJOWtiNJ935gwLw5V3uN4pwieEg1mKKVv5Xh8ettfPpGhieut/EHr1nt/BsaehvjSkMrZR94rbp0MszyjJpI2Eh8pLBQqZE%2bcgT0m%2bcCkrFAfyNDmTh46K4cyfYQX/bODBvXa0kMCxwfvSiHH5FhZ9VsPV%2bC9UWbbTDrtrG5Tox4zorOA8wM6JvOl1asNAfiYpSh7sm0g0GXaFt/LQ4ufh/xXKscc%2buygqthWaWNimSikd9pDZGW6F%2bAu/RWPvrG%2b4NAFy%2bylTWcToiSDdC0cDdSO8JeGaNkNS8jv%2bLx%2bz4jAix4dLYA8aX5m/IZt1q6zfBBTJMxoojOObGB0vR%2b1yJIHiVC9vmgJwA/anXkonh6cTpFX5LyBvApm2n4qFMuwwRW%2b/7i8piPHFBiM4Qr31mFHzDZVYtEqQuT3kstDqS3QaJfRh1OR5rCgG6JFhheoteh5Ma0P3HmoYZ%2bYBZBttGZZ1g5CKjHL2glWUsEhaDcfkskOYGPojoTgM/KrFyYTEUTwXP0TR6DnmvLTZEVodhMUoJD8M6/2/5UpDQBpTTaxQ3brpp3MvCWmSch2A/4yC0VpACYSfALLbxpFyMmszIP1AY9ljySyjbJwhOwG4KOJ00gLqy5RfGNNneR3JC2VleIOgreKZPhRuDO8d32LRu7sGO8ZdybY800cSW5Pi1UEcDxk78n007wzgRV5tPxO3npocwcZEkhGvfE7cGbjlD1VhFNx2i1fbTbnhAVGQMCwwjhVeeF/%2b57Pvmzp5/5028qk/3Ob/z5R3t3f/n7Ln/rW98/Oiixztk%2bq1Bd0mjx5sDDNAeuz3OJRj3f9vFQRjMJF%2btDD/2iwssxxALy9IXyle7x4R9uph/9vl8y9pKNQfP/t/98Q7PHzld8/APf%2buNf%2bXXhwfzdZ8cznKQFfHoHuzVmo1B8V9k44FXo7YaI706xut/Gy1UlwL32XAwPchzMIuyuJ4gMALv3OMILGzPBZA%2bMIjw3nJkiAw7e%2blSGp99ONt2Dc7XEw/z7HW3UN9WQ0DLqi4VpM25oqT8D1ncpi5m5eOawwiPUoh%2bUeGBLQ/9k2N%2b65eHpg1I%2bI7POPnzflv5bQvZmQm4e4i17AV6%2bNJfDRwc%2bZlcLdHY9JNslon0P2WWV70x2PQyvlhjtOthiZLwERqs1rvY9xaK3HRznPpInb8LvD%2bB6L2My9fHYA1cRj1Osv30F6VmBte0A3YGPsJcjocsNQngbmejcqUsVZijy0a4YwgDiagVdZrVPYrj9PqrJRMG7Ae0uwfyQNc5r%2bQ44gFAfb%2bQzZOdFK98Y7CRZZjxGxe9wk%2b8P5dg6lJmEJ6n4p9U1RSNvGHVOaATUh5igPaPVGpBTV56sLSworf2iTV42aUPnrRnFeJuzjYd55xjtZN0sMYwUgHeesiQy6FJEyW7a3HV61HDqgtEybPBo7mGtXSIPT%2bDN1jDKORzXkpCqHsMAAWrRpu3j9oIay9uHCPIt0eYXwbEw7dzItpcjTV7Vo6tsazqnNSETUdW3mNpqMiacXAk6gozX4qEKXWE4p0WOYdvHOCvQDzRZdMok8QW9bVhreLgdnOBSscq6SQg7xulRpBhmxSkYr6HLZDnx4Qn6ozUEUSm/03PlQG694qh9/vyr1QXbZCZAAndJRLTJpeYR0MKS9l0XvdsXwL2RkEqmSRJ7G6BdHNHkYOoJ3hkNBMBzXbkSOjhhOkegkzafFxPCByF1s9Qb8z8TNZLzdNFjOXWJCgHZWo1O7EjxuNODCrNJiWzs4%2bk9B/knE3z2pRa8bo3yUKNFotYhSPeAoAW0AvWMtxEEvu/JCmtJzNm6E9oO/6htCYoYSpcwuCHYeX0E7MyJEJMiixBqF7f259iM2jjkTG4GSM8N4AxT1AnwwLu6uOdygp37HOyseehvBugEOdxWKH15Pp0hTTUmQA9zy1JY9tHKmExnMhfB5EYXyTzGoN3DNI8Rp21s91vyb%2b6NMpwOE0X5F12fZh0MOzMkJqGVzyvya0QtSrpef39ENqPFKA1BYBQ35gwI6OW%2bmiZr768QLbKQM%2b2CXyJwJ3W/0F3ofudJisGwg3o2QtXqo%2b%2bPcCZg1o4deq/7/hjjvA8WJEI5QkA7SSYcCl1Jf/oBnJpMPbXuDnzjasUkVs/8mw20E0TgmEPwTrBpXWguStVoK9lvM2KxXHjzjOK5yi66AaOqdomtfvHcilwLK3UI2g0QV6JhglxsKS3Lrsmsyr%2bqDGkpvzH92OYrSDFlzT%2bi3p2WktOMmvjzuvymA5UdejqBL%2b0%2byShF1ZH4IgiR5FxJGvYXi4Ol9ORir6FN5QwtJqjIIo6RLtpBuiKd4b5oIdlmcrIhn3i8LMvR6bQW7Yjfs17wvC4CeBZ3Wmwyp5n6SnIKxsj0dTqZc5kuC/91Otg08YMNW8t7i5vgGimpLh54DisMnptq4cK260PSOSRRVyy6lFn/dr6K%2btb4t9MWkjUksqzA3C0woRKizyhRjRVnjJN6gM16Bj/y0QorOa351MHOIxGyAV744F/66R98/vffXCb7O3789390%2bGe%2b7L1JVT22f8K6PRWyspIoNcmFnTUHW5s%2bLk9yua7fiT3UroOv7Jbo5iVGLR%2bvHAK7MxfJ7776a09/Zv9jt//lV76pi4s/amT%2b9/35GwLuX/kXfvUvP/G%2bb/rO7Jn83VWaYJQXmBOwi%2b6bFf7IAHo4SeYilXG8CvlxFx4TPClvdl0MjwrsJiH2txK0b7TgvSVHVSiIKW85zHODd63G2z6d4nNvj1DuevDuKoBXfXgsbML2fcuHS4tJw6rL6tSauzfvpJngdiMCdvVeJyNqvdXJopNhJ2infrh5E6gZtvOgUSzgnr0AL12do7PrY0bnm%2bbYYZjazpGH/bLC8FqNzp6D2wswqye2cleF49e0cmJ3U8PVVzc8HNxiyNpDdOxjfHoMv/UyZvM2Hr//OiaTDMlZho13rGKd9pmRi94gxfUSmG5WuOa7soBiASYuCLodXyZeGWCkgA4XIR6mIxddsuocll1H9O1TVyvwdXGKqkeA/nlghAz2xkWFobw5dfBkXE1YQcB7XzVPBujzHKhNF605QctkAmc4RC5s96YB/Fw0kPHOhdFe%2bugr8ybsfNJGYZl4Q0XolEKKRaUkdlv6rUOSSdV7XZ8tP7MuMYvvEfxX3rnPWEypna3L4MgEVIL1s7mD9bDAcaYNTRgPM4CKz3v7AO1sS/yhi9YBypgg3cFp5wDrqWrX2WCOwwNspNs4CQ%2bwlm7irHOIjXQLo86BSGR8uoc0wByfm79yBO9gBROXi8wKkeJF%2bR7ZlCS/AwCWb6jwKE0djPon2CnXRNco6xmCo9DDQesEKxMumLRd8JyFzYxqqYxMwC9AnYsI1mViUlST9b4wcklEYe6LvEjO0VgXTucueu1KHGUI2h0WbHNCeE3rJwPuhXE3hZAllH2BaWdTHBgGdkwNtExiAsnRpWSmrwx8d6zymd7JAPXWWLSSbDUC4EU6o8hP2FdJ1nXRDlK0fdXaEoSzEYhkiUw72SvfQXta4myU4/gowPS0wAu3InivTqSoyaef8%2bXeZbuUfSnQkafAAYWONSzEymKkvnlmhhAQAPBvuK9yiWIq4%2bLlXU3wvt5v48Y4w1rQFrZN1DISjdHn62/O8fj1EvNrfQSrBR68XCPoFdjZ8OAM6ZrjI2rlcAPVq/M2ZKwUS3Cd6H76tIV1aimWJIXPrHzLYQGfEeI0xNagjck8xjAYIM5iaR/TNFTnn06KOGnDa6cosgj9SBvTJOnAayeITH%2beLZ0p9TpKgnfDCgfWEnTZ2IyVtTw7sqgyVpuhSxNM9bvinNRwFVFvd2WR5fEb4N6rRqDLVJGmEl3o1xOcYIC6rBuJqnQWmED8ROn1TpBsWOy%2bHyPHKpySdS5oTbeiCassboUYZW2B%2bnKsshk9Un1Vrp/ady2IJDUd6hjdlrZV7UsuGLUQ0Yww55IBK62sQe6K8wy93O17zM1QP1NN9CcTr0mvIoATMC/2pJ5KU8WutOjC88%2bQF0PjSGMB/VLGqFFVT5h3gnY5TQO2dd9a3VNZ6yXnfDEB1LLLKlxdjk/8XifwMMmKBXj3XY1UzQtTCdpIKnWfLsqqQr/LKI4Sctx6XGTL1PV63lsXj1x8qJWy/ZYt5qRa%2bQuLR46P3UiKItFOkltKKyMzcofdjiSZLpJKF0fWgabBsch4Hna7ODyeis7%2byO9jnRIZYXj0m%2bxHFrQ3c6X4GRfxtPXkupHYK6sKAb10k8kKT/6LvFOkbg/tuY%2bDWSryZpcBpg6w4rnYzSNZ9G/VM7RZK4bOTDyFYYT4wMHXfjf%2bn//xL//yn//wL2mhpDdje/QbfubRb/773/%2bLe8/jsTyvUBzkmK87WB/6uJrkiC8FuHKa45WeLtpYPTq6mdFVFxtrPk5mNY5GtNf0sLsPPDL%2b59%2bye/P4k2%2b2Bv/NuNZ/m/t4Q8D90W/4u4/%2bJ//tD/7wq7/nfO8sjJHsVWIHKaFhCTUraGd1v5ZXC2gX2YxfobtXIr7WQv%2bAHr/A7wY1ol0CdnNo43XNyU3hoTI8zrUCj/1Bik9v9%2bDZUmWNOyE/N7Lm88E6nTBfOKxAbTpBuvRRY%2bMoXuvbHp47VKAkrJjdr%2blZlMncsxvgpcvGTnAhZwCiPR/ZloITMubRgbLrk9sO1q7UGN1ST0qR1hRA/2qFyU3dAX%2b1VTuYrqkvMj3iL0997GdAeOAjHu9LQaCieAHTWY0nHrgL05MZ1h5bw/R4jo2dEN2hj3ZvjvYgwEaYovDIqiroYln1nuOjouuB%2bLp76DhnmIKV5Bx0ycazw2MFfZxiArLyRkowGcPpD1BTz05GnYB8ZQBXADkdaSqc5T5W2ya1iTIcYd6bQzNvisooOCGsdgp1lhHWvQ2XrL9h9LOQ0pU11OMxHLrc2OOYiVf5cF0cCECODhHcbqvYT2ZrR91eDECXyULHcA1DCzCUfywGVn3MprXYik0SS9eDEryW3VMkZxvorR4gPt1Cd%2bUAyWRD5BJ5%2bwibWBcwv6zdquenDi/U5lYIOjXmiep0j6MjrKfUw1/cHJEssJ3QEmxWllJsqbmMJJyeFpVYHMpmLpIsMl1PLjLuzSMsJwlNPiWbwaRLmWQlR8HDLC2luihdRPi/cf8MG/OhyEuofRY5w1mO/lBtPM9td9CKWdZdwroZ3SIKJJkW9NJQrsp4%2blF9LkFV7r3po5R0yL%2bp7aSkojHb8S5w4cskVX62mPgbLPyCeDaAjgY4apWqFofCvPJGSHLjMkIki1rD1GqRFX3ClNTYZkMgz/pKNmE7TCrEZB3ParF2pcc5pTb7dQvZsQ83cuA8dwafMrYA%2bPiTvtgWepRavRBi8GiGyVOhWQ027q4BQrpgNuCN0ar7chC/hU%2b0ZZJ%2b23iM%2bL51tFdybLs5ems%2bqoL4skA08NAlFhu4aDu%2bunK0ll6VSwZT75hKYNQLW7W9euMl2d8FDsZz7AzbuD3JcLnP1xw7/TYSYdZDAeq2d03TdsNlw5aAd9GLEgH21Hp1opn0zdRYztur5xXTjp6vHZEBsHgZbRkvwC%2bTA3MueZU7MeC9Td1yA6/JmGQrZ9IZi0ng7VCiMLzUMknhUTpjnGhYoG1U9dGvRyjDVanKLCssPhMjo1Emn0mmtIwkwFWA5pQjSXriDKNJk5SrcHxQf28y2XpqyxM0Km01ShRb3yYsV3a7S2SFGvE8kfbLvx2CcXqPC3JmbRAms3JhQRcasuoDeK0zkdCYCmwGuBMcc4HEyJuCT0YWK/qT20V1xbosY1RFTxYFZcXj2D6jRYZEWhRRX62MO5VHZK5pL8mKrWGLkpmlRGUB0hct2xPWvhcOMU5K9Dvcr4JpXZQ1mXdtYdTF5yXvxbL/ynkYhjye6jjqOalh3ZdlvrSdkdlW/Ts9zCWZddE2SCbRNEFtZ%2b1CkAWsBrJ/k9FV6Tyo5cGsVKcS3boklZ6zTVha%2b%2brRK5wJUB/j2B8IYLfjKzXua1WMSerI8Tg7jVPmgjGvS/si/2OBOsu2i1xmrn2FVpDENFnpIJv7Umsnd0rMjx1M3BxDISeYLQbcnIe47CRodT0hN3gOYl1N4O44L7z07I2P/qO/9pbve/3c9cW/83V/9aWfeuS77v62s1NcKdICRVlhbcXDxqTAsOdgttlCezfHrb4vuKx9K0N8d4TLk0Lw5e5RJfXtmJQ6%2b%2bitXzt69p/%2b%2bFMf/a/fdMebL/4K/9388g0D92//n3/wh29%2bzPnedF7gbDyFxyIhhg04i3N4beAt4y5eqCp4TDb1VBvduV0gu9tHdy%2bXSoUfY6LqroPongr5Kx68e0qUr7jC1DfXxSXdDXgMpxQLYzvOOdSt03udBzfM%2bjN7FR661IBS1Hk5roD2B7fVylG81g8Jjgx0c4CHtn08f1io3ECoVKC952O2rXIZu0QmOOeWbqkOTzoqNewHHmaXSnQPOUgABwKoLkQBOFeaqADL8/YvsTy7IyDi6pqH%2bWsODhfAfRdewAIfL0oVuCfuu4Z4PMPao0OkpwXWr7bRo1ymO0fCRNs1F15ewSscCZt7HTLonlRYk0R9M3nw4sisT6p19HCGGMqi9EC2aYhedYp6MBBmPhKfWlO4ChXiiY9un1EGo%2bCLJzgNV7HqVzjACTahRTfk2S3At/VINs%2bN1np2p%2bOYtaSXI6KRIS2evWX%2baWto5TpNCU8DQdqJeR4dIWSBIhe4jQNcAquRWh02hffNpZ360tvWpksD8x0Bi0sJyaoBzCMu9yn7adc4m7PY0r4kpzJRdpy1QJlMmG9jzz3AarIluQaciAmIufcwqqXa5Gl0iFXxhCercYTkaAv56gGi8QZmdS25H97aPsqTbQX97UOs5/y%2bTSZVQHuWLCuA3mmYaF5tz/cR04WGGvLEFEq195CLjYSRGg9HwQjerS6igY8gLIVtF1eb1Eef96HidKNtg2Apil4vneHVTnImiguFK201IYAPc2GARE/r1DLRq0OCnqkF7TYxlX%2bPUuBynePAby0W1jz6ZlHiKPDQi3s4LfYRrvQEfNm%2b2hupRWTPSGg61Lwz38YkqTI6RTmSQKyK4XVbXkvZ3rV%2bidsjH%2buMVhmwr1EKBbJ8YVvtR74wgnaxyEmzFVeIWZJ7XGJy6glbdHyb1U9dkULdmrcx3/OlCIpDq4fnz4BHVuA%2bP26wB6ZlsuzEvQNTLVELN%2bVzF2%2b9J5ZKvLyO8XoLV2oH3fVCvPfJVPsDFx3RLTKJs1hYG2oHVQelacKS5sBKP8fZtCV4TqwbFwSF6etS6dTBwSTDJQHrGbb7bezHGXYGIU4IRJ0K1byDVjtBnvE1RT3XyAWZ9TLrivc77yEXPgT57BMsZ5%2bycNWFLctC9KJ0AZgoJdP4ERBdBO9Gr00A2vTp5rWJCqbBwNvDCMEhiaiV3BstzASUswx%2bN0Qez7Aa5jgj605plfiBO6jkWg0Na4C7jHtM7ksn6EZkngnqWKxJ5XkE8HSPCUPLzlLvzkVLMxlSYR8lNDaJlVIa6uFbOEVRkUGPNXk1n6LndRAXrMaq2nWeoPLnTGRP0GvzWKZNM/m0NUbo0rddO73IX4S81sTSLiUvjF56sVR0nVUjdP0%2bkmIi/aQsbW6UdjG7ppTFv69ad4LaboeVZbVvp/MxypKAnfkkI8xLC/g9pMZmUkC6Bg6MbE%2bpGoL4MNDvW%2badz4B9je40hODz4gzzqodBYDzFTC5VWdWGdXcRenNxTBLv96rEKKHsxMV46mDQZWI/F5qOcaJZAne5PjM%2bWv27lbJwtOK4ZMfXRVLruQWiPgs7J0Zk4Y1Mhl/j31nMqqjaIvkiYF0SUs3muqK/l%2b84CtrpsiTjJF25EhOZZAXVohRXLkYJCd6pb2c0M61czAtPGHlKX9JuAZeOfRwaHFaFLnFaFNjqtkRW0xkC0wlxk4NoGOBn/rX3m%2bu3AOvmCQAAIABJREFUbzz7O3/7zUtM/fr3/oPtjXe%2b50OdezffPXdLcVEbpxWGQx9PtEuwpMiVPnA4Am4NNQpPhcDVSY71nks3XxycVNhPPIxOS3zqH3z0x77ha2e/8Ev/FgpD3Wle/f/Se28IuNMS8tGv//LvPnrlnh/y%2bsXls8kUvgB3T0iIUZrJZDQ/7MBplBUXkNsCbr/oyGrJ91yxg7yRMCzdcJu6k9yFd6nBdC9umq3fYd7gBex3a1xKHDx3VOOhLU06ZSO/n9VMj5ar/YeYgErwbkYg%2bcQDOgcekqsloj1PwLldQYcGsM8ul4h2PaQE6XseskvUsTPZCMgv1xjfor4TWDPsul2E6KC03DjZcrLYrFzEGyVW6g6C6RwHBO6HZNwJ3Adw8DKmUw/veOAqJuMZ1h8dIhsTuEeYHVfwHy6lOMGO00bamSOqaniVCzeqBcDzGL1IWXjaQxK0x1jXBCWy7oMeHGrdqTUUEK9%2bw52eoTk4OExo5cawLZCGDlaTEU7DFWHcRR/f72N65iEalqKbj7GqchxOJOe9sBp3QOUSiG2yLEfCCc66q1hNTlAPhqiMbt7l%2bxHdbQqMM1eSQ09SH6tBLeB8G1sGSKrMQyxBzXrueK4OEjoAe8jCI7SSDXmuIptJN85VIDzJmMy7L%2b8L69Q5wWy8JdVQ6dUu4FKKKtFNZssM3JxsKWjR4ZfJ2kys8foH8EvuR1lru/kO2XMH/baCAf6GYI9rCBt8omxAokDGvlEngOUig50tn0MKNEm06/W4R37B6K2w6wsOUI9BFxoyvpZdkuPSv17e9%2bT8yShKzS2zb3mhX/vKCQajNVkQLaQzZrHb6KrL2cjoupNMNeDiL5/O4XQCJPT08hwMkGLmhIilGuMyAZz9UyYuEwpbDYCRcSGRwjNnU7RXu/KsHCa6s8G7DrKTKYI1vcAF825ZwREB/FjAivTDusJK2EWBKZy6i7JmQmTXuJZM5YlPphHW%2boUytw1ve1m4iExDoy1khvmVHpGzYak7LDJGy85cPc3lffarrLCRcOSn/I7eaH7lwGthq6RRrP5dki03gxH3T89sWhyGgRIIbEeBX0tl0EnfhXe4XNVSo65sIccBBXL2OHbRyvesHFCfoS4042KMfjDA0STDSjdHPGvL77eHLeyf5dgaBsLAyzMz5y87F2mG/GMR%2beJ7lMsQkHMjsOdRyqyDFCm6DccY/o5L3ojySnPCBO4kQ0h0XATuTdnMwjKSBzFyQQvgbR%2bU8ZCuM0GEVj3Vwi6dCCU7hulq1L1rMR9IZdWzcoieJHWaziKfmMYwHwHhigB3hD1UBaU4DgatEUb5CgatWOSgNkE2DIeYzcYIw758zxHPet0I3LkRvNtRxb7nVbFGIJjAap5kPNcEV54pwTorsypoZw0IMvKV6N7JWNNZyVaB9oKJMPIc291gLL7wlNE4rVgi4hWBusOImIs%2bC4YVKgsSpx%2by7sUQ/Q6LOlFqqdFWYWq9sbjRSMI5gbwB5Xz%2bcVoKoNeG7WE6078tY28TRclwi22lkWZa1p0LIiatxmmBnljiqtnvOJujF3A1xwTMFLM8NDkrLuZpJs9MgLvJY%2bB7OjZwMaWe8GohqaMF29NKyNofyrrTM90m8RL4DxnpM03lTm40dhxf5CdYV66leGnxvBfgRogrbU/KtnMc0kHE3hdGKwnWZX6T4kos9kgyQP9m9I0RP1ZK9d0KSelhPvcwn1VouR5iJ0GQBJgNffRnNSZ1Jv1pm/UYNlsYj1I5ZjJWjNa/HuIjnz35uRf/xSc%2b8ol/8o2/2DjpL/qf73nf/7X92mvjdz/xN//Sh9KblYD2GUH7qofHWtoemJ98o9fC4FYO54qP9l6O3HMwd1xsDYAbZzWOxzWC%2b9p48lfnr8Qf%2b9/e89Rvf%2bmx7ctx/A08jv/sAx//0b3RO7/zvre474inM5wlmrjJSqkVLR9ZfdCnz2%2bF7m4pwP4TOxW%2b%2bhh4IW3LDPG2YYbf2AeGPrA/gFgzNgjU5Vk0ADuZ7GcOmFTq4RkpeuThuf0SD%2b94eHq/wgMbDl46qnGfSTZ98bjEw7RzJGB3gLuPArTelmPvc66w41IR3G4alRQnHIL22qvETSPbURBfeRWySzWi2w6ynRrtXUf%2bHt9ib6uxEwC3aeFs0Tn1pWYRwsNc8oA9Tg7GbWWHFWWZPHe5FgAmo3ELGB63kd50MI134Qa0a3wJs7mHx%2b%2b7C5PJDHW4gf5OguSsxPaVLkZXUrylasO9Sp2rJ5KLIK/Q6XFiN3p36vfoUVtRcasn2KnOgJ7KW%2bKYwgxbZVUn9k45Qm1caGbOEEWnxIpISgyzQUfJgq4tyumstUqc5BrDGLKq5mSKk2AFqwQWJglQxqDG/RZ7wImPPGI70ND9qGhhhfuirpy/hYsiPMVsvI61YI7TuSaREoxzIjg1Li8W0nL/Z7mnjiRm41hNjfpxFsj5cDKQqZc6fWMNJ6CeNo6GrVcoVmE8b8kz47mczX10BwcC5G2Hydr7CDJ6wNtFoYeidYQg35SCUjMCU1MYSmwaTfGME1Ngj0BAAPZcFx1MPJwPDhCMt5DWNSKvlnBgOy9wxgTKNh1rNKqT9o7QTzcwzU2xL5k5VQ5jqekm427vhzwDc3%2bmUzJk%2breAdTJBBhPwnsoCxIByzmnUCqeSK6IJulKSnrJfk/vIfVtHGQuYNRrXsIIkcHddzGbVonqqxDrcWt1kbFKq%2bd3rnGQaF0IrtPl4imDQQXo6RZsZXAaqW/68M%2bojGY4VWFDfHALFvoJ3KehTV8LIESPwc07Q2tJZelOtacMwRtvTBDfel4ORj81%2bsajMKBpYRt6ouzcgSmZSAnub02nwHu8HC83EWSmvMgxJNV1z5jZzkO8wD4XM/XqO4FiTbu5oL2ce6EmcY42rB7MdxznWqREiCJ%2bP0Wtpnz%2bP3o0fZ8N9iGczmU8wCPry/A8ZSbV1MQwTyXwAv52hmrcWDkB6WBbky1DlIdxWiiI3OgMD3Eth4R14gTa4mbjUOCLX4H2cZyH8IF0UQ5LximDENCgrobHtS7TwJlGVi7qhyX2QnRvgznba5BBU566FZmRMbIZ4%2bTsC3LCNIknhEsCLZaMBmKmCdBCk80aGJmooxvUuKqN977ia4cCrmxQVNkmg8Hpn1D7rnVINvL7SLpK%2b7nboYsXVRfLqcjhbXIe4pUgyKiUepktzQThP0AvoC5/IvljkaZJOEDFpk%2bvkFhejulUmYdX8JUCWC0KeE7esGqES%2bY1KVdg3ZuUYkWf17MuFoOxTbjLhp95Qe338N6Uz4kpDNQ7Py4yHfF8WHaFG38i%2b08l4IU9pLJQtC07Qbn3guwEB/nKBrp796p7T63qYTHVRHXgJsjLU%2b2tcuLi/wEkRhCqVWvYtjRQ3N9stl9EB83BNd1LMz4rOjrDx3Bbe8ELEnJfpEJxfYs4Pbwj7uXnw%2bqIHH3t9uNNY5DxWy25tIAWsswp2oUoBsu0MsM3nQFI5SDMfgVcjrXN4mYdZWKNO5wi6gXw/OSngsRqyV2OjGyBlvQNpU1xwupgHEe5/3MH//r9%2b9AM3Pvfsrz/z2//lmyJD%2balf/szbfvnph3717V/l3302pXSzwurAwTtaNfY3W9ga5dL3wxrY7/s4SIDCU7Z9e%2bjieAYcnSnbXnU8fPyDv/VjX/Onsy9Jtt005fMN9fP99Vd%2b8mPf/AfP3/9fPXDf2jfdOlbPUTrGOH6N/IgVS0zyioRqXNx%2bwcNb11I8N1V/d53QHNEq3sxTZLe7GFyeLkrRN09GJn0HeO6gEoDOZkUW/YFNRRMvHytgess6Z3t1KXjJvGcT6FhEicmn0jFEi%2b7AYfjIyF2oLw/3lzXkhU3fV4BOBn1g9OqXfOD2UmoqQGv1WonTW65EEbTbLkG6vGVYMq2jovEtdg4WhyFQoBeJJBeuM7M7QpLN4TzfwjS%2bBbfNAh0vI8tbmMwy/Kn7ryIP1tG/NENGW8hLkQD3e8sArRUPNMXI%2b3NEBT2nNXmJ3Z%2brV2XdPUQ4EcZdwpsLHtZFF2c4C1exkvLzFfSGBSanLXRXSiQjxlM0hJhFQIsV%2bPolKBvhPV2sf5h0lwCz0MNKq5BEv3o0xkm4gjVqal0WL/KEOR/N1UqObLSwfYmLzqCU91ezM5xFqxj4vNmUycSYGKcG3kIB6dQ3t1lAypdXy7jJYJd7oi/n415vVzjOXNSuh5XZCU6CNTk%2bz8NOnoOWglDeH7Vr1N8StK%2bFPCdVnFuWncfIggNh3HVj6McCdwXg8h0O3tTPWoCrc5rIGyYlC13pr6XKKhcOwyNEXBTY7w20gqowK8YuhHr0rHeAXrwl4JzWkIOIMhQuZDw4q8coTtelXDSLM13cdOHkIUlKdJSUU4ccA5IFlJtnYhcaFtALRmH424B5Ae4smmQq%2bNlVmY1S2WPzb%2bsso%2by9AzdLMXPPJ6be0U0m1aSrO22yK88V4L7qbGLSU6tBuyoR2Yz0wWXSatwfL0FL6YrGvtjvw90iA0%2bnkh6KeqrAjZlbdY05pnDL7iKZcUUSvU27t3pYgsdGAiTnYoIfKblOkEIG09znSeOxCKhvUuAOmT512%2bC1nM00WrTRaeEwIShvmZQ/c2kAjuICG70WjuIcm30WKAP2J7m8bvZ93J7MRYO%2bb%2bQtlLnw78NkjM3Oinkd4Hg2xlbUw575nPvYEUY9EylT07VIInamABodYzxbc0GauIcMCdJ5F51gJpNwQOcrf4ZybhChYa3ZV3LJknMURIt%2bW18Ds8pPrOyw0Qgs687fMGeAfYbRHy4gF3irAdqbURLuxiao2nHjIm5XpxlbVAxSmIme7jVBuYxFtp2Zhyd91gUy%2bra7UoTJEVcviSmAdpFOybYny/PFwprjmLLNFbohoww9WSi2QMtJAnf6v1sAb2kPPduiYkSWxZC0ncZFolInObUlcyFEDBNcTc6RtCyp3mrpjuXVy/1vK3CWdYhU7DTuS9xPmyy6pxK3mZG6kXn26Q2vya6LzfQNm9gp%2bnfjisLvNHXxNqpiT70J3MWy0gB1SmRoB5mVvSV3zcUPpTMN1zMLulsea30s7wX93kNx2VFwPy860tZ8auCjEMk0RdQJkSSpVGW1mncZJ82FNdfV9jr0CCxO1hOgPeg4YIVny8bzYs%2b8nrDoJ57xZzcJpz2GlYx%2bXZSbJsdHl7OMQGoUX/JpRLKm1p2cE6QyqqnvwWRUymPiklVZWUjNE9kbCURh6B0XWeyg06%2bRZw6OJinG6KPXmYsf%2bmCzrVJDJp1PUoTdEOXIw7P7H/%2bWZ/7Va598MxJTmZC6et/XvO/hb7v//aNpjZVODSamrqyzGKCD1VGONUNmnWbAQd/H3gy4Z1yAbtmPrLv4zGGNV%2bYeTp%2bfkf38THn4f777w18iVVLvNA82OMo7T5T23bd9zd9719o7v%2bWbH73v2vtvH8SIWXr2tCeNhEy751eIdgvM7mohup0ju9bC/vMe3FYNl3r3Gniwn%2bNGEuK1IkV52MHKTiKVOLmRLSVQf2DLXUhe%2bP6LhzXu29AQ7ksnJe7f9PAK2XQXuG%2bDDUz/zUM8dJlWj4UQkNdvB7hxaS4kpGjRKYWh3IXAnSu7A2XYZ1dqdHcd5Ns1xrt6Oy4zCaIAVu%2bqcEr7Scp8TKLp%2bKaBaA15zyYXIyVwlQw7BwRz03Qw9bD7zDEef3gdrzFGz8G3VPAer9ZYKSMk8zmcp12M4j0EUR%2be9zKKKkQyK/HY/VcQn86w/vgqslGB7UttHHVa6PVTrPVqdFZddKoaQV5j3nbQMdXHxR7S8VCbMK8MhDiRRFWORl2MDWg/lff4HEeTAuG6j5X0DLNaC/WQGW9PKTFRgE4Q3zZV58w4KO9p2FbhL5l0ndpY9YeOMj0B5xvpCU47azKZcNAetqUoNc7mLay3C7HF5LHPwjXZNeMxdGrx802sJSc47Kxh3S%2bEcVdYRgZN9yXfd2uM6MNuBkE5n8oRpv6Mkg0TapSoBH9r7OEWEwf12CtHRiazj3AB0h2kwYFJTHWFgU9Gm3BYJVhoHDqxOPCHB2jlW0hnymCEpA%2bkyIUJZ2ozlnNNpPoqp3MVTacDrarKjXj9tL2PznQTEZ2ZOPhmehwuTJM5p/kl2O63W4hZcUgmxmrBltu%2bS1C12zrG5Zza2/Me7Pxsv6XOM1MC%2b0VI%2b9zcJ7uSRYkp7DRnG/g3gWuHixMPvbAQRxlud7KCvAjcJfHqgpuMql91I2vPvb0au7hKGYvBUJTJtNcon%2bFC39wLM%2b1ywc6tclhJ1UWf7iIWJrPyMCrpk4Ooh7MkxoAJayZipHKLRLTKXa%2bNST5Dt6UsPPsUGWOGz%2b0mTKohIbl47lPPzsnaFFcVltEmzMpJafVS80/9h8in1AnElrK33Ul7lYiE0Akz0SMfxqlW32RVwUEgixEF8kaTTlA%2bbONglGFrGMlrn3UWhBHlCS7P34IRsblsFlMyX6HUSPHqedjLdpQLcO%2bhS207ve9B1nqxxBdGPmERssXFOOoiY0A73%2bb6psNFq3HlUqi13AjeWWzmnNRSb4pGJgyYp1yMC8w7JagWtSvRNAGRjX1b4E4gw%2bTUMwzl/IQFtmt0kccMlXnnK02vHdaXqBFFQwPc2cu0rL0jYNywR3Z1zmMKJ1Ki3e6Ji4x9CAS59PjWMU2TWflNMvF0n7ENRU5H7CM1VDYhcQG60XQxo1RGFucVOn5HnkFCRp42nRmLPOl7zau33u7UvzcjyHocaw1JFzOV13RpHSiWv0rC6KJz2ff0vptIoFnf2IUUdfYEuE32XRNa9T37zOyrnUuaviz0ip/lPXRbtna2uTUyD3kIPFsvQVlvgnc79lqSgucfuJTUmCBK1MZ0miAS%2b9ilxJbnwTZA6Yy9N0MjpbGRLJnJ6HTUMVaS1idfbH1VUjTouHLdtq9TjmOLKtlmaPN92J3H9JSng/NU5WK0lp3lpSalGqbdFlqiDJPf4biRpOrvzqaT8W4QzDNhdVJirw6x0s/gOWyhHtqdljjykGydTQusrUX4gzleGLz4kT//N3/o6z7X7B5fzL8pkQnWN77bW33sz608Eb6bbS7PgM1NB6MceLTI5RlS4ssFCKNnezTg2CtQ%2bJTnaV2V5/cqfDoNcI%2bLJ2/%2byxsf/fCbqL3/Yq7r3/dv3jBwf%2bc3/syje2fXvvGH//p/9L/8/iemGB26ysZ4DH2rHvX28y1ceqTE7edcXHqowO3nPDyynuHZCUsP0tKMTJorusY/vEm%2b0cFgayYT1MtHFR7c1IqV3F44VsD%2b0lElFUxfPCxx37aDF47qhYWjhMEBsXZ8/kClMZYhYgj7%2bn6AVy%2bpM0x0pCXv00s1wj0NUadXKkQE5p4mlq5dU1cYYdINK3K1rXIXuVGaowmbU8WvcaLheVzm9avKA1t7Po4vsegEdWoOtgjsixqXnEr2RYx1yQL3KkI6m6OYewhoCXl8G26Lg/7LSObAE/ddx2Qcowo3MdhJcDYY4vo8xeldc9y75WIgYCpEMcwQ0Ut6Crgc/AzDJKFOcZo5T4xkgYu1VB1nKD9dnxPUMzFW7ylJMho/ZFGJcArk1tPWMMO%2b1W/XAMdEHpDvEdBEfX2KZMbJdBNor5HxZk%2bkxMYvwLsj7GKmTiMC011gvVViOvGR9A/Rm2whJ/hd%2bAfUcCpHkkFZpZSTDyfWlTZDnEyuqzEqXERcYNA4pGIIXX8/muvAZjcB7zWlOUqFMul0AaQXOIBTLi0fD8XyUfdkIZ%2bK0/PWIepYJTLUWtKpjdvcO0BQbIm8hKXYrTsHE3D6bfoYe8iHR%2bhQHkPQLlKcGvPBoRRnolRGwZFOIDMCHjogOfTKrtBaPUEuLLsriVsE997wBNFsE5N5jn7bR8KwzuLmsXM0IVBDwtSYYF/HQhptNh%2bWZeGtjKY5eFnG3d5i3g8uToSLlTc1%2bZG6f/t7edsWXrJSGaNvt4y7JqTmOGSSqusiP0nQXuvIBJqeJAhWjaQh7iHux8iPUwHws7Mx1t1txIOJJiczKXbcx2hAqQwW9pGU0Mjzp2sEk/EMkO6H0ULrLCdpQvEEaJro6oAsfDPqI7fazPeWeSfrzo32lWx/fAICki4kVBKQXhoE2KN7yyDAbf6AuvLGewejubq%2bGOZye9DG7RGZ8SVE4vnZ1cyWAevbwzb2x7mCDjviC/tKkmHp7x%2bFc8wkeVQ3tr%2bzObBG0GJwEO04lSlVWEqdegj9DXddOimmWQdhkKBF2VEDdvO7KtCj1j9E2EoRGuZcooRZKBp4ce/RtAVhGW3hIB5joXU3zPriwCZpmvdVyr9TimGSVC/KjLTvK3GwAIny8CzjbmGbgy7lg%2bEqqtkIYOVXEz2SB5HS4qcvr4SvS%2bBeIS7IDnMc9NDzpzIe0yrSx%2bkC0BYlq4jyeY3RZdaz5KFoD2yHXIQqcNe0cO6PAH85iHHMK%2boe%2biIvtPEa2sSyHoq%2bE/lmJSn5FVP0wx7oCd9rcXGg48E4i9Fvm2TXxtgnTDylLGZhquO0gnVGmqyWXYpzdz0kxUjlNMLye2BBp4oe%2bIvIpJExcTdkzI0enlIa7ouvBLZNNxfeOF6dZd/bfmwqs%2brCq3MBuNvFgSwqFm2diaklzphfbNo2fdLPYk8KOvGepnlbElunU3WiuaijknmGYL2Rt6S9QKU2w8jBqZH6SP8086Qm5C9HSvuZaP6l2NYyUMKvcYynfwMBezMRNeECwLjVWccvgnZK/KcssmQc/gTXEMQTqE%2bpffcwjQu0PAfjcg6/HyE4nsNfAwbdCIPQBaV1xCkkRf6Dt/n4tl8sfu57rn7mb/837/uyPzZwf/ir/ta7vuN9P/IXP/vlzvdu3VKmfW2NkWFKZIF3lgXaVzWHZrCf4VMRpT4Oric5SknkAs6OStzMPDx/5MN56umfPn3m9/7vJz/8/V8yVVKXrWf5rzcO3L/15x91EDz%2b%2bLe/90MnLyQY0UmFNLexH2JY9Sknx1ccO3hpEuL%2b4QzPTdrCVrO3kHXnP2ljd6PIgOMOzoIpdooeos2ZTOYvHVMrVmO76sqD7G/P8OJRrRO9mQDu3gvw2pVc9nmd/uqX5vL66o5OanfvB7ixY2wczdVZxp1uNjLBeBqKv02zf0phKuBKC9jNVS/WZHmaN0gmXSOL4X4IwrmRaSfjLmdpJmd53/Xw2WeO8fa3ruOmYUT5PrXu1LgnGzpwhmMPReKhdehiMt4TnbuHF5HlbUxmMzx%2b72VUwQZ6O1PMRwW2LndxGLaweVeMbb8Db5Yh2HGEdc8DZd2tZEaYd89DzX%2bI5lMnXF7XZFpIPH8HI9zCKmG7%2bgTjDCfhEOuzE%2bxjDV2WiabtHZMeOQ8QgJkESB28DJiwMHOZ4yr7WwsqMGFU7j2BL0EPPdILLdHNbbVV4TQ333GAwFTqI5vvycxrIaUaYAezGvHwAN0RwdkB3IzAV8G7bpqUx%2bPEYwdlRJBiPX7N8pCawOAQrWxLEkKXvuzbSNv7sjiQPZnssqW2Xak6yRFwXcwzFt3RfValg7ax8RKtu%2bqTRFNOHSIHW27Urc8apd2tBRuL0VBOlq8coT7ZENmNBbi0gWRfSOY8Vw/dtoNJlmPQpsNJKWBdQbw%2bD8t39Tm683k3CjZJsupUk1XvBNbtEMFjSx0fMqHmusi8N73H%2bZ1m1dSJLIJ04unx/o/m8LrRQsqUMJnKsLmcCOnwSemN1oXQa6QFmnYoTRQT33Zh288PWdbpxp6vGnWeD93bz9QVRH8v7Ltpt70z9YAfSPInZWYVemFXQ8jSpxMBL2Tmh0xCLKmTdhC0E7T9UI/X0ORasKHSElNXwfQTAhMCFDL8XMDZgsQ8zlnGKJBRTTUUEsrILxddl4Zt7AmS1kVvU87C/TJ5dJ8g3/YEa7mo66jXbctDaTvxWinKLES3k%2bJg0lL5hFmZ8c6yPc2hFU8ph1GwrkC8uS2hZLM1Lb8hrLk8DHui%2bjo1icgE7MLCmoqf/Ewg6h0SVWU3ZtHFx0aPd96Lczr3xgnZqBu/u9JiKzKad6NzJxrjscgG1lmMisWFrLYja5Sk5xUw2XQWSx8vq75G1Iq51jCpPHR9uslYd//mA5BkCllEdKRogO1rlWrgTWuPkwohZTjCuDd/b2x/pXlw7uT5RpjmBKO6uOy0IsQmcVUiP1LsiedjpGQ%2b51ptW5NsKsWzFMgT2C/lMtSiL6usLnXsFrzL72MPvW4pclDOE1ORbZyvT2GfvuSE2OfBBQKdUxrgnc98sVn5jWj7VedugfxFrbvtexxTWMDIbvZQvHs2iqCf6X3nufhuirYkJy/ZdjFBo92%2bzWFpNFW3rpD3%2bnBjjZjw/ko%2bDBl6Q3TxnlnTBNvMJeG1ZgEyZZNt4ScSdSpVUsxkmXZWleXYx/cXMhlf%2b32Ws605yDLmnmkBOH4nn7kSQQ0cD%2bM6k6vkNUSVj9ZGhZVOB73AwXQ8RupEErFzXQ/v/moP7/vrH/2Af/P5D334V77/j%2b3f/j0//do/TO698u6VVn2FC83hwBG5KGWjO2c5wmshNsoSR7QUR1mPKO3fK3CJBbtdV8b9o1GFJ8sA/r84%2bsyVtdf%2b8T/6G%2b/8yXMDzZfgH28YuL/3h357%2b9Of/ldb3/4DP/ob//rZ5LIA95ay7Ryh%2bHr7RQ8Prmb4%2bHaFrZdDXHmowK1nPDyyluHpsSYzcVXHynjP3vQQB1OxLlqXzHXg2OcS0TwF6tL3XMy2KxCsv7Izx%2bWyjz1/osMZmW9O9KaP8UKi2x6SK6XUlLFWjeIUQxeYA0cSUdNLFQYHLvaNo8fwaoURfdZ9I3Ux%2b7tiGHQmiEgCiwHcNxvh1SsOcGvpRCfD33ZD/71fu9hxWYxJKzYyWVXC/GTcHWAhRw5cFLGH1oGDyWgXbmcIz30ZRREgnuZ44gHq3FfQ3U4wH5XYuSvEYeSj18%2bwMSBLVGE16SAfZOjkFfLQg1hjmblIdKT8u%2bODiSE73Rgz6i/nkNIeAAAgAElEQVTNgH1WedjBqYD3qzjBWbAC5pAR58SODrz8alPPa/sKAbw1lmBo2k%2bAOTXxsbLedrLl5GiHyVMjnaD0RmQk4jDgIpw58hsltWpUjoOV6QlGRjrD91ozB3H/EGGxJUmgEg5n6Ds9FenP0J/jpPBl0UGLSybPtmcVeoPKWDfuoxxtoyMVM3WE5L%2byFgspbcs7AulcYDA7xWm0JnIdKbJkoF4tiwMWXDoScL/n7WMz3ZQ24g0PkY82FyFk2iZyK7hQY9a/zOZmaUiplqYBLDYm5CVyf1htUTfXqzGj7acU8nEwzbn40WRHAeryLfP/RopjQTzPlJMbN%2bv7zglgRtDefX3S44KVbSRENplaHoUuBk38YEnIBraUhcw0o5VkgbhgEZ8a7iyD02nJQsDmosiVsrZAquwR/03QzuMwHM2N2lf5Phn3s0QcZbJjSmM66mDEHIKTFC06ypi/Fzf0861KXAUltI0cD8aSmEVGjosEsmuhqVcg7LBhzWQRLEmFEYJgiiTpIowSTKYdrPepS7fP1siRDLPLfnNus%2bXuKc9pK2DnxgnNamn5jMh2r0ipdgWh1J6TYfc9FQ3YhceFvQsrvci14W1jteYrJYa3mkUr9FcWJFBbutoiIDed0mjUCbysFR2/z0TGKJsiEUtEc2SzpojaCuYFy9KejmocSaDTgSAKVHLUfDbi0GPzPjLVU3Nhx427ohSpyZhTA0%2b2ju%2bxryyXM/ro5X3zG%2bKvhZ%2b7nFOIlMkmpr9JxJbSGrrMVIlejry5ZN4Zs%2bqRzsyWXtsgiE8nRvdO73MdD2ox2VeUJwWFzP7IPnd8AivKZs4D77wcohsWSBIt3OM4FcJwIO4zyucqqKQW/qIbuUJQezEqp%2bEdscRTj3k8clEElRw3pqicHvqtCtP5TPbd9aOlO1dTIy8Ji%2bYBL%2bY8Ei2mToe5d5LQWrFuw9KBpfm8OHZQ8mE91u1IJYsvo3%2b3z1rYfetI01wIL%2b6jWTBQKyVyQysP5BinUhWesQXZvA93WKfKXSOwP4u1MilfaRF5xuLizAFqHPuiU4w4z5B5Z24pl/IOk1FdkdHYqAeBOD%2bXxFTRmRskbuRL3H/R68NPVGZl27D1Zxddu5EXiZrBzlQc/6pS3GNEKkO2Pfclh1AKMdEhrHJQzFzM4hKJWyzglPSNTogr3RKslRF1WygKI2QT%2bMMidD6iwsFHPvWRb3np2b0/tr794T/1d9712Pt/4OfX7m9dmY9LcRPrrTp4JC/R82oMdloy1h7QaehWhsit8dIwwD3M62EkoAD2JjVePGlh/3aJS/uf%2bMCLTz3365/6Z9/zpiTMXhw3/yT9/YaBOy/q69/7d7bre9//m6t%2b8o7JMe2ISni%2bi%2b7tAr9/ucJXHTt4dhriwX6GFycBKmqAGe43LJqUAnc89PdO8ep2F/tnlTDytVNjq%2brhwJ9KldJ9h2hGb%2bNsq8ZG0cORO5FGbseW8MDBBnwcoUC6VZ8D6rXRX/LiZFW6U%2bPkloNL4m1u/NZtYilZzIZe3d4QYSxdB7uzFFeiUEKhIjxwgPU9H4esoMow/m0fh5cKbJr3CNy53WRlVFu8pdEiyNLz0nYIWJmguqVWg%2b2RhyrzET%2b1Cz%2bkzv0GKhC4F3jsgSuIRzOsv30V5bjA2doqrqUJnAcrrPXoPhLAz1O4QRvdISsVAmXE4ktL7lG0mp2lw8wkLuD0PNRxgV63hagaiVRGnIbjAu01BQdM/BJGz0yKzYlSJmMmLhrNu51kZOImGCdwcTxhx2u6rJiBtBDGQSVHBO8E7m7tSSJob7yNeLiP3nhT%2bKWQ1VhqR4B1b7KBeVQLG5/zfe5EFif6nbx1BDffkKTYE9rwySRm4Q2nT/XR0XhDjax1iGqyKSC%2bNqz6XNxhaBep1nQ8wGp6hnG4KtPovHUg7jF2kGabFs9zO3/KHK5MO6%2bYjB8/TwoXgRmR08ERwtGSTefbBCMC2s2rRDgKD%2b21A5QnW3B9HbAJ2jkR9NqNFeKiFysrQ4BuB/4mU2Tfk2ZsCu00ByuRn5iwOM%2bdk7KJ%2bEqjtQmqdqFm20KTcV98X87Dw4BFmArq%2bRWQ01KNMoYmcLdyGQJ3KTLCZE1TBIWfiWyGCXNynY7aQXLmFRcJ066Mf6X1meiNeziu9tVx5g6WLL1JT6qrSuuQIjoWBCpTyQ/O66MrDMIeiipGXZsCTsZZIgyniLw2xjRELmtE1EuZKJEFh/YURH7Q0PESCIjrlAFCwgAbMM/7QExIeYpgQ2MdSr08N4J%2bvmeJ4MW9v8MMxO43LsxvzDg2PqdnZqJYgoQge9GeFBg1Gf0ls%2bIgymJM2110WilSY/eouNfuQPNKSneiFd7rPqLWcmFgEaZl0fkrYZ%2bNz/65KIa5JpHKqOLuXKRI7Gwb98mCcO5vwbpfCAE0ZTID%2brrXS19w3lSSH37YlvGloOVxFIluvN%2bqMclc9BDLZ5XfQ8%2bPMZnp9Yqlaovv0VqT8wQre7pGMtOAk6y3YQo0JbNYAZ4ta28WSdahRZ7/uY1RAu0DusgfC3AnmPQwRl4N5F4SvDM6RxaeR%2b6Iy4zuTCC%2b%2bMBr9JAWk7SUJPPeo2vN4g7rgtQLWHl1KGm3dMbiglqKSRl8b0E6GWphqrsK2vlq27%2bw/lNKaxYFueVcmutr7k%2b87u%2bw6L44ntlbstDiW%2bmM/e1F5N5g7%2b1vbWvlvrnAIJCnlEY2TdPCsGfWpCa3xeF96/Xgx1yM6ZwuYNz8LdfU7cOfTvR9mqSzfUe6uPJnMZxGx1o4BJnztTKZ5jhJ0vN0WkpROJFOmrbSogVk5WFO0D5l9LJG6hZor3RQF7q4iCYFWmsV%2bmEHZVmJUQZPnC1BAnGei7s3WvhPP4cnf6L8yHf99z/wx9O307N99Wu/4zfe877%2bYx/77RoZI8JDB2/ZdOqO4znrZSl4isc%2b9TzEr6V4aTXAg9NcIvo8H7LtybjE71wO0fk/Xv21o5f/6Y9/qdo/Xuz9XzBwz9bf/w%2bvX6u%2b6fC1OVp%2biSeR4%2bqrkWjb95iMStu0B1L82QPgmWlbCo8sNoa6XWqNHezPM%2byPKrRaDu7ab%2bGVq3N0ybBvaVyXDZfJpLNNdTbZcnoYH00Nu%2bsgucxkWAcz2jXu6WWkl7Uqa3KlRnTLQUo2/TUXdwXAXgHsmFLmJp9VfiMJpUbD3hzXF/3dFXGHNHB2gPV9HwfbhWjamcBKAE6pDRNa90sPZV1hx6kXwP01A%2bBfzYG7WvyOTn2cewnyZVxnD%2bSAk3jwjn1MTo/QahG4d0QW8c77rmEyiVG3NzG4kmB2Uqkt5OUU92z5Yq0U9CqsxRHmK3N05hXyiJUTVfrSnMQWg9WCqKnRkwQVu1ZSS0SGO4VtvBCKbzYg/oZsouiWDbjnvGAlNSx3NUxOcNpdQ5iWAsS5T8uwSVjR4O9g5iLvOMLY80vzTo321MG0r6w29fM5WXLjwUfQzfcHZNqjVazMmNS6gmGqybaz/gFaxZa4ytB/Xhxy2Dqpkacfe7Epx0lTVk6sVA8rmf6sqMdqh82R30XB45UbRiLEIjbKf1E%2bQkDL5DwWWFqbbclCdAkDmeRXi/0dNe3haEscNAjArQzGelXbe0twYpl3Md%2bUJFiT5GqkNryHImGxMgYJ%2bprzz1UuQyzLYjziPmNCxJQ5NCUz9pjS3rnINWxnm%2bxvY0IW0G4qmrIqKv3om4mui/7SGFEI3AVIiIWZukuQ0WoCdzms0bkToAt2aexDfjd3MD9NEK7b2XTZCs8DdwX1LZoxy6QrWgWD8kxq26I/68UpcKfmXEu0Fwc9%2bFsTnMWOLDIE4khyWgfHSSzOGk7F5D4gDKZI046CagNY20xkZfXSNv3pU/RI%2bZqNDhhcQIsM4iKj2OhYEjRoAA7%2bhkCJm1SMNZE7ca8xiwcL4tkeCMgt%2bOdv%2bG%2b%2bpxIq0%2bHM7ZHDiEtLjiQL1QHM9NOLWFF9phKpDFFAGWqfLjxCakzh0wdfXnvyuV6CPkyx2WQSvdhBuogz/lo/6/Pec6FsDigJq4b0uIjd7uTnbm%2bd/M7Ikxe/%2b3zWkHSfalU4YWVfSQh3MSRDvXhYgBdRNqF5LnSYYYGmuuTCjqCewH2qzlQC0qeSpGyBO1o9UxhJiQVKq3r%2bBAXW4ILOM7qRrW8b/3UeJ6UsB6vwvVMJKUtEwhAdjSYitACBOxlw3k93Adz1JupC0BF2PV5o3lU6M5GCco6Aem7Lwk38t/GDl4WRthYB8oywcGMbFqmfJmVLBMreNOU55H3q1BfX2GhIFtwLcG%2b8f26RbLT13A9lJbaN2/0tW7COUVY2IxGaFhOFm3fqDv9uNKqLCwZh3Gl7bCQyAuLNpbPECGsHynnbSZVjhgHs9kgX/9Yx2pWou90IwrmokX5OuYyJANgFg0giTW6U9B9TbInkDeUxHCuthC0lYC88ZNMKQdvFfFpiWuuYz/w2Pq/5vMLqloegHSAvND9gvefhKFYppud5%2bPIdHx/4ZP1z7m/%2b3Z/48K/88Bctk2Hdn%2bHVq9/9nX/jqz/4mx%2brMezVSItaXLbesupjpSolKsjnSInMUVnWK/tzp2y52ImAo1JB%2byyrkbk%2bPvW5Cs98iMWW6l/4pZ/6hi/6vP6IVvEn6uMvGLgXD//Vn9jYcd4fP5XCD0r4HGA9B7df0ETMh1ZSPDshQ83xhC4YZABszMpD%2b9Yp6uureH7PRRImkkgU7evgOdvWHidAnCHW7VpkL9zCI2UjplcrdF8z379c49puC69dzQWos8PNrtaIbi5pC9oiiRbdXWrRrxuwTtD%2bWilW6jJBCxi3iagL6AVs%2b0C26%2bPkkkYCOFARwB9uM1tVwft%2b7eH4mWM8%2bvA6bhQlKLW5ZUA7wftlMxHtSZEE7fcC3M251S0XJeUyhw4m4wO4Af19XxJbyOlshncYnXv/CuUyFTavdDDaSXF33UY%2byBEVIarNDKyB1M5rVJGLtFzKZe7YKs2kxsqZk7jEpWiMXaxhQDeZEGDkm2DbqpcuEFYacqQ2t/EdsVzjewKEeZ0aXpVS9o2T4BhGYpJAnc41shkSOTCsbxG5cCtHfb5pmzjaEl17b7Qh58c9isQlp0yFjLuCdTLeQUJjv5EUcaIWURPFtLnLeVDT7lYGdOvhLet50Y2C0%2bIsZbTHGidXEmmQNmvONYpczKnL571YOUJJRl2kMweoJ1uaTGlAQrpyIIy765W4CNrtLRJ3DVa9MxEaPWt7Do5o5SNJvK2QEcyzOm3lYNo9Qm%2b2IbaQTfAnE1ygOlsWAfI0cWSx8bs2cmIjJgvgbtl2G7atPIyGJxiO1jTMbh4sXyaSy1BrtVXD7HPRYgtG8agM8zYLPBFf2/dsGyHzvspkNYIh6jkZUm7M9Jz4MpOoai8iO0vQ4o906NHP10N0Rz1MB7Gc5kwkNYqE6PVO1r1/OsCoP8GgvQxbW7ZXl%2bwEXkpPCetOplVcT7piG%2blXlBvoyr4dJfJZyKRApheyupXRvvaCEGUTvDcfwB2AvLZT0zYvgB95n32olSPOzof2LLBZJOo34DMBNQH2eY7T9goFFhJBMSXel8tXV7TsdE/qdQjcY3gVr38i%2b1uCdIpEpkzJNK8K5j0YJ5NKJQ2ddopJ1qhaW9UYthWGchP9e60ypQUD30hOtf313C00C5mmS418bmpbqKxu%2bQuOVeY2QpxmLgB3DWcsn4HsSjTMtdhEUvbD%2b1NRG055xLSGxxwI23HmMdxwgCqNNa%2bhJtvKYyqFUdZDOOUJAia4ynEczFNNZFXvJBXD8Pq5ceHLjdpzLXDEBZOiSrLsBfX1RsbH/XvVCIWpkq2YeoxuqyPOW3SgkXwmW7SpUcCJ%2b7MAnosUO1IslgSNaIe1khSw3nCG4fUw8VLqI1xsu3INltow7ZvnYn4v52X%2bzYWy2ESaPAcB/rZtXoiKyWhI0H8xYbXZSO7Q5wiWqYdfuMIw2dZEDQioLaVumfdzKVf6RM43ErOSsQCeC%2bZx4mLQqVCQhZ9NRDJMWZAdB%2b2x5d7PiBEczAq6vegJ28R%2bVkjleK9VVGupPpxlHuZphaxXon3iYj70UU9mcPoR2qMC7b4jVVX9gLVeQpRFiZUO8w%2bAEwJ3RjNdF3/hm7zD7/ux3/1bOD390K/87Ld%2b0QD5f/rZT77tqd2rP3Lvd2x/760XapGp9n3g7lUfg5wVUzVvkWkdR66P/bqsw73C4dTx1qjGq4UnxZbKvEZyOcDTv5W/kv7eL7znU//szfGU/3zN4U/S%2b18QcH/P%2b/7x9u5x/e5Hvua9H7r9SgbfL3HwMu0SK1x7a43dZ30c3DfF1ktdlG6NR4Ypnp4ERm9pTUmZ8Uy9io9nTmPgLqCz54r%2bfLv2cVgVYtF47VZLZDA6tBrAZM%2b2ueS2d9smlfInDemLWCRBQTQTUPlq39PSQWYzSaXyt5mtqEknsDf5nNKJKJM53i5kQN2m%2b8Fr6iBzTUwBPOxWFTYdldXwNKxkxto48z1Os2TgL9FBY7tGsO9go%2bXhIAaCQx%2bTsRZi8txXUOQtxGmOJ%2b67jDxYRffSFFVc43Q4xOp6gXsHBYphIbrQHa7EdxyRVJSlg25Vom2KMn2%2bRikSmoglQDRcqtdeoo4rOD1ybAZQE7RwQrfFEfn%2bpELV0ylGeU2TDkmNMJNKjRsNgfjEJGgSx8gRmNgWKnAnQOfda81q5J0GK2FOmlzpbKZh7D4BmdHOU2YjoN9kObVSV1xoWil18EdoFxuY%2bweoJhvCcqb%2bPoJiWxYSUkTPWitbtGjAkxTbsw9d9AmqVZzN6NXsiN2jTNnSDl2EUmSllkp1yvKawhq0NsyUfSJLUgyOEIwpw1FkyX3QPUOYbGo2s/OJeH5Wogg9AbWe4yHrHmIt35Kk1rR7gDCh3KZGr%2bXgIC4kOVXarxQ%2bOg/cBbyYCoQCApqJqgZMSzRE7aHP6zzJxF9wR3BqD7WjVnAklZl4a4Fms3tycpFCU8b1QPTi4g%2buszl/w3skfbKxALDtlbeTVVQty9xsx5xsuGXHCVrrWjG1F/dwXBwgkqJM2plvjh3cNazx6tjHXYMShVygSiF0U1hDSYpUTTQsIvv4IOhgPNeiNty40OavlAmk1EFi4gjaU/nOLCWVyPY/fV2oX60PQ2Fs9cOlnyYBvTCrjUCPSBxSk9xnXDjk2RlbOiu7sYsMK9eyoGgB/M%2bN8oY1sFT74inYLy0T80xDNWEQ3iEWAjN%2bdiKlUttMHTHUrJsJz93ukmeXJ9CkVs19lHwBY9puHsfi0Y5MkaqLVpF6HCwqqzK3vqlzt3iZybx3qqR6sSCT7E%2bKMqm7jG0NTdZ9%2ba65P1KJFHDbITqg7l2jeKd1D8O2JBPJbYt8H0kygUNpRKrJoA7bSzBAnbEYUo1OR4G8X0%2bEpebvmDAYha5aotpxtSGH4vlEESuikhIhO2/aZdXFMCgxFd0er2RJk3ApJfp3KTbE8YL91lC9tJLMKGlTvbyy66YCq5HM2Aczls%2bUsWiCcdXgm0TiRl0D%2bSLZayOXab42Ne%2b2/crXm%2b3cJKsyaZX7l32xfxr3GYL6JlPP6qqTtDjnNGMTWReNq/mPOyyWuT8B65zr4qXmXSqnahHZ1ynvpGXY5iHdp9GYKBXr9tGa2QWZThGUC60M6GKjf%2bvPHUznCtbF9tdEVG0/lsRUykcKH56runb6trdbmpBapqptv%2bVEWC1HqPod%2bH4Bf%2bpgdTuEPx8jrrtY6zg4jHVcUQtJOn%2b5uPdb/N3vffwn//PdJz/wRTu2PPxVP/%2bu%2b7/i3scfe/9XfzC5xXo1BO013C7qtzpwVojBOM%2b5wJMl6rOx4zyYzZG2XGxELladGruVg%2bf2KtzOA/TfDvz6d3/sx25/4ms%2beMdn%2bCX65hcE3HmPHv6qD77rrf/hX/mt6ciD55c4ukEXArPopGjZc/DQMMUf0lHGOMno3OChfeMI2Vs2Ed0%2bRdLawLOnsST%2byPxLduUyq66aAcd4LU6vkGH3ML1WosuKpZwcr1bo33Zxw4Bx229EDtMA7RybWNnUas35a/sfrRvtV22%2bFIe7xrS1GBQvO8AuPZJv%2bzi5oqB9Zc%2bHu6OFUrgf699OFl3UDI0JeBl/1RPgOVE2w68wZKSjNzRBdd/DZHQbrujcX0ZdhZjOcjz%2b4DVMR1PU0SYGl2Yil9m4EqF%2bqMTG1EO%2bWiDM21h1a1TDXJJUOkWJ/5e9Nw26LT2rw9aezjx98x26Wz0iAX2lltpEajQhhigIGwiORUgYBalKJYUFMWUgSaVc/gHIOFBSqDgqBAmQMsTGBOSIMJbDYCQBspDUtObuVnff6bvfcMZ9hj2l1vM87zn7nPt9V92t/AnuDep7vnP2%2bO53WO9617OeGnXstnZYZk4EuhDMkelqhhhy5k07k3EqYJx584RJ544j9mYRsnGKgFNnimzb9p4UA4GymEs4xjUmesoy1ZVSvsSkNA2V06zZYjlGXp4/QFI9RGu4j6ELhrVOX5L/mIae52TZR1Pq908wrG9jNuG1dBBaiHzmADPRw%2b8jrSvgnlH6IrhOATbjLuScVu/0BXCSoraBlDvRDSJoH6KS7WNm4Il7BL1DZH1l0DlAcnn7qHJoEhlln/3cZDPzPcQJpzOe%2bFJzawamKbUgO06WJHBzibL4u%2b7seBxh6xcBpkmKZiXCrH4Ltem%2bJMAZc5ZWeAi3%2b6hPdjFiRlWzFXN9mlgWCsOlDCcB/mSeLXXm8vS8H3tX/Feyo1oRybtjsDj16XQTKiVgojRKSGWbIJNxF1373GbSHh0RVueSbIGzGeKgJjED8tOGJWS5L3a%2bxtTHM/aUgZxlT/fVirWWmdPfO8Zy1RB1UkXJTc/fx8hsIpnlcOlg4xIr0ZVkCd5duvjSXTn3EkqaapTMqC5e35PdR9ZEpT7BVAJYSefpgC%2bJ0Uw%2bM5nTf90sVKMaqgKobBLHzCNkqr2mRpfa6li77mM0MybOvtOMl0wlb3XM0s2zik4oBVtOO7R3a9R9xIxONrZWj7K0viU2vi5OJx4m09jcLlrwaVHIB6Xririh6Cx6HMeqS7Y6E081HslptF2N5qHyjEUT84y2hCuAWX7vvFNZuSjZRbrf2WfyfOyuVtN81b5zEihSDutf5Rjzdpe6W3Ko4U9L4K45aHAyC8Ui1tUrymVkPy6tEbBLw9B2RLnMYjZDr8b3k6GoNGVlpu5Hkg2VY95S915V6QxvrhEy8SDP0sFk2tf3U2uB6oaGN1kBd6voDLJ1mVa1fuQYs0%2brt5ZZVimb4bpiAE4gN5yVZF1MtdU8VzNKLDGYj/EiRrvWxJCT63wkoJ1se5PWWLYtpTTCtNsIaRIeTsTXNmPjnXxGvNpLjLuUa%2bnvMmjnT0v7SSOI3CRUJDl2rLLqoWSPZh0hYOcqoju1k8vodFzXWsuXXLvfUgVyH91kgNeWCYbNg3i%2b4Ug1%2b9JLm6RN/NZLuv6UuVim5rlvpICbR/EcnIiwHbi8IpOECZdW5I0Ad2sWSupwddgTYofNhf1%2bnKlz1yKlZ72Ho0WKZBEgyadozDwU3TqCMEWU50LsMN9JGrZt1VJLg8efxBm26hF2tnz86admn/vI7/zmG76UpEvf%2b55nf%2bHJS5ff%2bnX34PJnb2SoN4F79lA85MPrcHLBtkgzggz4RI7i1tjz7o0X2G4pMhsWwPVBgS/MA1z9LNC94X/M7//CW9//vi/d4Wajpv7/%2bs8XDNyvvO1nrjzwtT/0K8mN4lXwpjh6BuDyDZnHC6/IcPUzls67DNpZRLq2I7WTHxlg8dnDABk1qdZ5izTYU5aa7Lhs5USQhrS5H0E65SckRvkQDqBTOuw2yThmrPfLIrVsdGCd37vGwUvsXg9xeCnF9rUQlcsprufA1rUQNX7O1MJR1o58YPt6AO9StkzKweuzESRXQxxdSsHQRdnKo4r7Tg1scI3XvBbCv2QP6APpMIBP142/orPMCrhPFxnGk5mw7lltF51LU0z7mQD3VjNEfWuBpJOjtqgAuwnaqaYKb2Y5as0A/ZT%2b54pTZUCkgwUHPaGGVD7hj4korDqMqavgKEi7SFuKKAIEnSNk13tA23FB7IXYi4YlP2vt2Dm%2bhRMfC3pTSrFlSx9wBwodmOGMfzZjxVB9vQOG7DjdZ3dOAe7CRAQYM%2bmJaSBVLO/CTnnBXCcNTWAea%2bctunXrhAncXZZQfTWBuMdkI1pAriYD0xmX9Wj3aCw8ARodkBq3sDvfw4SG65K6XQG39rcaBOtA%2b7x7C/Wh1oryfI77pZ1DFH3KZoDj6Cbq4wPUqsZkm1RGzmja7%2bmcrkwKSxc5gXuKDhsTwdNCWXey7W6gIGvZrLJNOk8KvUM6MpSlNO4aTjuwdp9ORmN1uJxdtay4oZ0Y2b14ESLfOUZ0siM%2b9mUpjaQ3b3riMLAMvDKdviR42sBxUZwhawUYzTwcFAvcCiuS5oUuGYuTGNF2E1maq2VkOeh1KaUxn/dhC%2bOOA6elF7Gxyu2aqSRPqut6vqZTX9/YdqTu0c5PyUp5Hj4fj2lw0pjpKoBIKnIm5JqgHjZEU6wxCPqwcq4oQVY0kcnJOCgTIPNX0n%2bOTmCjHQM%2bqb8VxZBlzAg8WRadcGkWPBJ4tGlyvnh2LktIpbPP8m8KEtTekvrqqQSHS3zDanFgVRAlL3XuR%2bcqSmK40UKT72i1esN21MRkxkmMJierhdT9rk43WOToVlZyGf7i9O7lrpRPLrHpG12sxA%2bYxeZm1yuMejlQ1S4rc9qSNSH3IQMvXEcZZTL0qkFv/xwZZ7J85bU6WoUGqA5z9VOX36U6qG2tz2jB0iYrDQ3NcE2p3iQnIz9Ao9GVPpRe7UVmpqcSH0awH0iSLp2gqfaZN1cnKrItjsfCxLPejGMfLcoyCrVVlsmWlRbrYT2qm9WpyU8T9XV3G7NQd6IFhkkIBu2yVxbpTIWTgxIEdi/P3oUDyZKYzBhy0ak72Yvdf5mtF%2bBtv7vrl1sbf%2bOEVLY6KRIAACAASURBVBapjNnfPJ535MZyibkUZyEdC4YMiqwoJqFlbqfqbDk3G7StGvP9m8OM6PBlkPQFbDPo9hbq2MsnOMyb2MMEmbjDjHDkNXGACW4U%2bj2fe9Zq4QAxBmoeo3VGsILOEtn8CdodgOfvfA4CdOGFLPfFUdpBpxiqvIYWykHOkDgs5gHmQYZ4OEcWNhEFPBfHnRiR30AvzZjiBX6jKlm1lxKu%2bQB%2bvSfN/zTO0a0H2Gv5%2bJcffuYXf%2bUf3Pv9GyXzvP/8jv/uo//w7d/4qv/i8St4cPA43dFy3LdbFPcDHifZM1ukZuKlURTir49S%2bDUPr8tSzH0fgwx4dlBgSCeZoII3hfjd3/mlf/XP//z//Hu//Lxv4t%2bTHV8wcGe08OW3fP/vzj%2bPVzHd8tFzPoLQw/FDE%2bx/toGUji42EC8ZbRamAXdm9hpfC3ExOsLj0S68wQTVijpGELBfjAyrnwV6Sy9FyFLTmxNU3TSwvwTuvp7v7kjBu9OW8xSiZS/1Pxd47YK%2b68Az9HTn8pZNtJ3cRTTq/P6GBqfyGG4E%2bLR25G83yMqXwbijn86oTPk1nShcKA0%2bOYE7U9l/4roy7tFTyPMaFosCr3nF3RiOJihqu2hfnEoW1d27ami1Qxw359ifeajthSIlyTuJMHuNjL40ASZVFbFod68sP7G39EnSGxpIb4XwxymGtRCdOVkn6luMIsvtDPKsBhrGpCRCBK0jpP1dVOsZmFFThhthXgKE7UPRpnPLxIJx9WLLXvDOscQVlQ1ZS%2bDOy0rApAF3Sm9EklAL0IlPMGxsE6tjFt1Cc7SHpKGJjxgpEPduIu8foEY/eq4CGEtUXjoXKOx7mM/YqdKSTZl%2bkWjQWYCOKFWXiEcBJkHOyCocGT7dyGKpV%2b2E2TJLwHDWZnDqHmbdWxKkmvYOkZ/uCYOiy6X6UJwA0GFF0r6XWijvg0uljWqAAZ9zsidLIpOFpbMieNRb0PIWOUKwlDMwwEmYKbozWZMsV02en6CAKyTnbrbCwmusvbMiwKh3gt6oi5iOPqw6lVTKwt2TrItQPsQl8LJ3uyUiYRfBxCGbG78fSoyBE7UUOlAbpctgX5EvcHA2kCmgWKMxVyzh5olLfQwnHWX/Zk6dmoM2vL2RuqScsaxO2Uyr1kCaayCmk/yobWQurLIAHWF8NUt0PaQF6MqNfiXPYJZLpltXa9RcdNAE6NJIFQTKtJYgjOwpJ4l6tE7J3Pf8hseqDEOrg/vbreWsflGmXa/DZ6AsqFOhZp9ZTado11uYTCfm209wx%2buU/42XqwEE4wzc5YmmIqnRyqsTda6uNJSZbyjI9/KmyLeod5e7npMdPAO4l/LhsCSeD3DXciltpSBV%2bfYMyYOcm9KZaBUouzyDgPsCYaOOLJ5Kt0k2ns2/nY8wZCIkyk2WF/WRc7bDLDjLKRUncQpk%2bebGkwJ%2bvQXMhqgx62rhsqy6q9LZqosgO5VkcQ1ZWVx5vRO4T52loGRubYEAnlI0JT0UjHuFAne5NZPMNSpNjBdc8SbDPlamPYkFnI%2bpya/VJF6FcpwGkzVJmRUYkaGvNsXrvVOly47eK3uU0Zy/MVib71SDVEVSZrptPrcLXF2C75LLC38XGZhW2tvaHM/DCQF97ZtVs8oUeVGIG4NUNPa6ErLye%2bepCOLdPfLfAX3gzSK3XElYPiQAxB6yBRxmdewixi00cOBPRAcvenjaRu624E0nGE0K0cOfeE1UJhO0OF5yoiN2kbZKUAq4513Pmi002KbYn5tHu/FJ0j%2bKXa6Xw2904C2GKkM0TEXgTsaaEpmIuQrGTNM1Rua1RD4jr5gOM1mOTitFi4nnOi1xklnJinTSMBv0kVQ6IpX1/pZ/7bf/x4%2b8%2b9d/8qtelEc6A1LvfcPbf%2bLKm/13PDvQXBin8wKP3RWiMU%2bxZa5drMJcsP/rDMXx2PPun6dizZl7PggnPnsjx604wLUbAcInP/me4VN//r6X7B/LHZlrb7d/d8dvqHP/%2bBMv/4mL3/nqr93%2b/Oze4%2bcKfMXOAp8dVKWfTn3gy8vadtcIPUpljjG/b1eCBamtevIowPV%2bjEZ1pZMmsy3GFiXQy6Yg7iwOO/r2N8GSyYoJzAn6XcaycoerIEu15VcziJ86twXZ9UvM4vn8N5d4hteZXw1RvZwu/z13Pc6Br3PW69jc9hDgJCyQjwOMH7%2bOUBj3pznsgVhrMp3jNQ/dhZi2kK/eQjZIMWh30NtP0dpOsDv1EPcy3OtXkbYTMGmmsIbqXLccUFisVLnIxISDFz%2bYRIYg3J%2bkGFYNuAug1xSyfitEPkqBFmlFIhbSBQb6%2bT33dYCe%2bvUKUJ36OKWfBDXQEbXmymZrJ6qbW/6kDIPyTNdhU4LB1WnCD3bUfttHnipLboTX0leeKZ1FbSraYg9RvNLKBxMfWcPDNCZLq5NKsahjyZaTfNg9iUe5uzFLVU8QrluA4%2bot7DI7aULJQ3kionIdAmvnHiNBqMNdcchgKvFVUhFvFaDJlYFsFYTkruQkVG7VSJqRAXdmTxVZj1ySutZckjCNSyy6ePeL1ldLelxajuXfHOzI0JdZ9zJwp6zASZuWKxNlf%2bMScBc5k%2bwfwCMDtAjQon/7PJQETJNFiHYlBdNyj2ceOg0NeHN%2b7m41Qa5vdaDMKLiBvDrJsGipd47o3t0ExdLSSxCYse4SvMp0qJzw9QigM/F6Z1ZVbvOTlQ88QbuzmFyBd03AQ4aSbZ0DellPy3MQuJddNWRSYgF56hqzgo4C2p2GnRMRMnhORiD3zQR1LUS1scoZGHhcaECnPqaH0WIqQXq6iSAE4/kUDHpV2L1iz5VldQEpDUwWsTAdnEwp0OcRZfaxYczsymIwF093vba2VAahOhC4zvmI970BdJ3QWf3csJGVfZb1yGKXCk4SbGVoqZm3q4rjjU6KeJwLVD3PXcax7gxuliyv9gQiu6EDlptPmGXt5jtlu2mb5v027qgM3idTeOI6o04mskpBYOtoRQRoe8rGL4E7LQTN/77wPXjzEXxKaPICzWCEvJTtMysYUaR3wP8GGX/ndXQwIyAeT1UKqHKkQrKoSh8hoNCQr0nk0qKLdr2PJG8jFG281iwmbHIB2JTNcGuGtATNMJYJuCcTCoJ3F0ukVSLDYB6iU0mXZewYd1MEqTzPWHL3Hti%2b5bsNyZKrE0vQ7qr5xoSZDHhR76CJoSQwoqTNJW5yoRTleAVOtlZSGp3QMHFdeeLgLsX7nTXqiCaxlDVBelZrYnI8EinMzaKJXUwVrNcL3PLJstOw3ZNkSdJCbOGCf7v%2byQW/6ghheSssxmiKDtr%2bEOO5LxOPZZ8oHX6BxbzAWDTtms%2bDRM5sFmBOu8dJiLiZIZmHkuhKIswo48s8hJUEPQadNmpiGyvjyWwA1CiC5Xjj43SaIfI81KsVvP3r8cQjj/3MDz31lz/yovTtr3zrr333j7//7b/0kSeAZJJjNCtwzz6KN1XgER7w8rTf7yfA4xkKEod%2b1UN0NfV2mz5OUk2y9%2bwxcJU%2b9H/63Admx//uX3zw17/tJbZ9WUFXH14w485DL331H/3ofT/9xv%2by%2bxvze08p7iZTZn07QbBbiWVNFp07a3DAuaaH2jPHWNy9rSzjcYg/PZ1I2nZKGXks%2b2cHrFnRGUy6ycIvfaTLPav1U7yXpYf65u%2blIWg5HvHDivZadpRljF1mJ2fX2JkViC6ppdIFBLjpWXbLs4A5G9o1zRTCSUJ5ZZ5Db1kZwMa0soQ8FEtI%2bDUJUI1nCR75srsRM%2bS8sofu5QmG7R629hNcnAE3ewscdOlxXoG3m6BDmyouwTPJQsNHTvlLQ6/G68oA5TSiGyOUMG%2bVQFh3N2yPKiFaMwJ0Dvb6oALseF4B7czCoTQWNfIu/k6qRaEZS8ler0URmPaU3xKki%2bzCFYiluhbmmz7olNUbaMk5cWgEOhBTXx0CPnX4LfolW%2bU214LN5Ddld5uybZioeZlueqEDPmXIvK6DLHpWdbnhdlo/xJZka9U3ym8HtSPURuoms9z4/lu30KXenRYxwooHoJd7Q%2bQzBWYFGeT1l2Bxe3Iak01L0Yh/L%2bdO81xWAAQsznORyIznK19TkceIBsANFMZSu3d/J1tIfVR9fiuApczAJRxzAaslhlygY8JUHu45%2bXgBsu1jBJTN8D0ROdk6utiIMnGIJWDSslFQItrZUuMoa93p8b4G3Hm/VnwrF4Z1xl2Kl3a0fB%2bnMSrmA68V3MP8VL3hRehgwlqCLta5aJRhVhZUG5XGwX8J3q1vkUyfBOQCOLjSpa4qfPGiguHzmTSgUdOWJHy5HKf1l6w8B/JGlVlZ9VjZZ%2b6jWc0xmVMao5NG%2bnJrcCeD3yjj0uUSz5/K/jyOx/B8/FfVDYouhvMpOjL55FbqvPg%2b6FMu%2b5eHiAKThJMyTQBWPoRgicHm3Pt0FKJVS28L4uOEhG3WTda5s0jHTcLSCANlQ0066YJURUpEEF5iyUXnfkYSJmWUS57u9nRybXOCcitulDmd5TRDa8g1h5lSc2a80JJ1N5lTp5ZIuQ6LJjpiI6uN4mQwx1bXHIekiK2MZ8xJYpWbAat0lZH6Qv0DA1cpp6Eb1om04Uy8u7hyRQsBPbe8RsaUmSlrrdrUVQDWFyZyKjHzNWYBZlAtGeUww2DhMkjzrEPVv4tEiJM6J19iFmqyo2TdR6gzwyqDQ%2bccr8nA65TkHC5qKWvhRNYBdd6rEBhO3riRjfTcc5XlNDJJyTGeUg6kE2CJR7EqLK3CzsvVxlWWVW18a5lWrc%2bYNhuoj0xGJ4trvqwIklkn8%2b06Ip6b8hn3zYhjn0WWOikMr022nsGnq/FMow7cRmOADk0HHNEiibfWiQyWU%2bQpoUOWnSuRMimbBSJNTmjAmniieafjmSNZCNorVTLcAcJaBbMkEynMaoKqD82ao85dAebTADt/Bx9873f92n/8YvTtdJH56O6jv/OGV%2bHy01f5jjPQze%2bNXeCuJsWThcQRMVvqqBriE4cpwsjDA7MUBRURkY8nj9VF5lazgs9/OMXoX//kf/jQ6x75%2bPvf/eLdbUrN9m/cxxcF3B/79t/47gde/a3/zcmt%2batObxTi1e4XPq49GOMNNwM8Ma7h5R1d/vy0BKl6aBCw378rLYyWkMldXeBWiM%2bPJoh9X2ZjTBjJakUZCoNHWbtY3ffJ5LveqiSBKesjz3ozTgVaBt7JcyEqdymAlknoVdWxu97QacAvIsRVpLiMEDeRLlO0s7ficXTAuQYNBGSjS66FqDq9ut1MXD43AVhR4BJCXOMo4hP0e5j0Q8S9RFYD5icBgoaP6KaP0fAmfNLOfg1%2b9llMEw%2bvfugejIZTFPUddCmXOVW5zHEvxMWxj8bDU9RnNXjbC2HcydnQLpmeuw5Iy62NMySNQMjz21glFrt9KWChGqjcwzrpxjRFQd07n3uSY0Lw6DzCFwVGFSYaUZcGV6Z8jMXUtB/UzpOZt3PmMvhYx1b2/LdRgcy9Azfil251xN24DC5MFb/KKyKDBtl0ggJhxAxIscwFuNskT%2b/LyV4UtNPzmhszyjtv7GUZ2QfVcvO%2b9M5Oq7cQDffAQMcpNe/MQWBgSYCTsN4Fxsx%2byo42CdA0hJn2biI9oae8BSZaXAYD3yjRoB6SWljX2YoMgQGalgST5ySsa1cDDOfUuK/rhvk72XgOFiuGesVCaarr21uPvBUZFOw3YyjdnmTYOdFZY%2bylUmh7iCmRkXK2bKIMwA1yyTDYMykOBxtam3FwdyvX2ujt5bvAjNJAI8yTtTl3bb6F3TTBUVS1lRwmqVrZRVLb6Zi858YR7mlr4hutxB4W/SkqnA1IMpocrUEL4%2b5IgpmlP2CG05IvNVl9vnoyZA68u/fDN7UMpLM%2ba40/sGBUubRo4LUO0aZR09yfLePg13SK0hUMWrnp/TubykaVCXNsJcOihcu6X%2b7dqBjgdu9JC0C7hLmuejaqGWICfmNy5XnollKoVEkmAzJpUK0i95fjZwGaFU7YNGNus5qdlfdKQZWZ6kjQugF3xrLwe2XeWYft%2bazClbXuvGLdKfhur7oy%2bWEypjWvfAP0biFAyu4MzfsdGXd5n4UkYnLBql6jjsV4il6nisG0UEei%2bQiSXVVepYd8PtSOtsaMq0P9d7nmaC9cvu8KcOeuCkALNOttcZBhLzthrBIngPMhms0deGIfoMunDKhXv3dl5B1wl0kAJ4hFgYQTNolDGCGxYFXte/Ue5Jqs15VMchC0azWME50oZIWHdqjjZLk%2bnwveNxNkrZqbXMdZPjrgvZldde21luU0JYZ9mWXVzl22iaSrz2ieiMc7gSQLpFEJMJwl0leuMe4ShFrgCA2Ru7BT4/2RKec5HSiW91KasAqodxMwu2EpGyE3CniBZazlyibfOAmarQ6K/kj6zhgdtLwhxjMlFKRPJzifc5zQlbYpA0rnE4SBj%2bk8QBTlSAY%2bJrXMAlUVuPN56rVC7IMbfgY/9xE1q%2bjW1Ndex%2bPSmxNCx8fBTog/K/DBq3929ZO//MN3v2B9%2b7t/7YmH/82nXv7D3/7fe%2b/48w9xbKPMs8Dre8BBlaYJQTE9ybwkLfAZhHjiKEW14uGB6QJ54ONQrD593DzNcHMa4mojQPQHn35P%2b%2bRPf%2bL9v/pSQOoZ3Vup1z7v13O%2bv/L1P3Pl4W/5oV8ZPF0C7tLo/WV2UWkYNi348s4cn5nXED8Ton2PNqLZdR9b96T4xCcTTEOIHzz90BNmIt3XVL2STvh6CI%2bA2DV8O%2b1mPXRVchWyBQHJzyGVYFA3iPGWGGxKVp/d0D4C3BBPFGWhLyDEM0gEsD/H5FKI5HdxpzaAs%2bysVpNxBEGBxbOcBGTi%2bV69K5Xz7RYBrps8hOw8l/quIZfzZ74CipsoZMWBWWTVWSbEaHAVPq23/BqCnH7uFYymU/yth%2b5CUtlB%2b2KM%2bSDD7l11nHYCXKITSG%2bBRS9Ha1FF3IyxFzeQEcQnBmxLy45FJUSNUflnvGPiRDLsnUWKoUufbh2SV1sFnDkJEp9BFDeLHBMmU2HnseHqIDwz/c2Hu9RtwGsrK8/Aq2DrENnpviQkcrXSG%2bUYVn20Fzmyuo9uAQxsQHLBrU5aI%2b%2bD/yHr3iGSz5E1ffRyoG%2bDM8%2b71GSfA1TZ3XJgZMApwbJmHlx1d%2bzMycSnBJuWvVLZQWVEKZPhBzk9wY2kc/dK7LFaQFKiQGvI9HRXZTteISwry0N0j8zmy/9juZysykUZ7VUyHoJeYd%2bNkmcSoTIFRicCsvE8p9OZr3TvxsSb5t0BYt1T3wOXbct6d5dVtcxcytNbQqAhHWUqGhhLy8q1FRRboRHwp86By8Eqpsewq4dFgPTiMcLrO6B/E8GxlKtp8mUSXpLELA%2bTiUaA5HiMqiRq0la6DMgy8M%2bMfIt%2bjFAYdwho5/1WZOYHTeC0ZQi61DgcWy6v1sC3c57ZbEME%2bg58iY2dmwizappUQ/2t1yD9kpGXpmYZVsng874k2%2bp5lKQ%2b6bIlOyhWbtpL%2bUD5HNY/O0egs7r7eljDWKKGdSPbTntPtxqyKTVxp69HdNo544zGlIuxDm/Z7qG8rzjvMJFO6XBZiWBbdCuJ55AO7hACmGXbNdDOycFSjmeBr5sWkdSsn6lxdydee9kFvCrlMvqgbiLvyqSDEfroCAGgu5QKRGQLPUDYd%2boILCZB5CrKLEiip6iOpk95WB/jVAF/K6IrjWV51ZYhk0uRzFAnruoN2VhvREpSpw0qV5S4ODpCPaLvqwLPeRIj8%2bkYxOBaX0A62zE17r4QCpTUZLL7YBGiyzYuDYEEh/5dwrNnVSP9zmEC5zzjALxj4G3iIF25WUEuT1aWzND1i9DY2oXT0nNfrsSRqFquvNoJeOm6ECjU4qvGXd6GvU/29QTWImuJdVY4a9ZRi6clN7QVqJmRpR%2bPMW21UGOB2yaZIIpCvm9OY0wS%2bqRrrNPE66AtbkPM76ATOQL3eOYvVx7ns0zAut2dxissJggC82v3mInaA8OtZKWSuUOEKGKwN8QKulJ4qLYrmC/o1x4im/aRVXtumUaOY/0hAfXIvT7%2b8QcOf/Han/y7P/rL33rbC5KlXHnbb1556Mv3vvFrfuSxd508CxzGGowaIvReV82QtgMZ4tNB5j0bF/ikh2I09ryHZgvsNH2kni/eFlf7BZ5e%2bIhPAuQf8T42O373W//wV198AqjzK%2bDfnF9eFOPOANXua77/F6IE3/TsEwyBXreWc8Ujsplc7R45%2b2w%2be4LZy3aUcb/UE7D%2b8U8uMKtAAi3oi36LHZAH7B4GuHWQYYcs6dUQEZMdlbzRl3p2a3usIBzfL9tS4k1JzEzwHoCfJbbU2EzKb5hFlftTWy7MuVgFAnchxLNYiATGebHfsA73bjm3h5s%2bIUUhIP86Ulyk8nMYYto1NCf6%2bQCVSxl2LP331TzDRbs3dsNk8y%2bwg/aBw7yQhshyInAPrnsC3EOOKkETgf8k0qSCeJbikQcvY9yfYueRLcyHCQ7uqmExzDG4d4GXezUseikaiyomzRgHcQNpd4GMHuINBq6mykKxv66FqCYrfeIahHDAPU0FfFGjZiQ1Ai6NbI7WphknmU5gyWs4xmvVN2rZaYdP7%2bDMNKhkjDQ76Arh6MtyvvK8t0o1g%2bjPTavq2Hd3fnOcN5mWpWS1U1ZqmVoWmqzDsa8yK6Hgn5MCsu2VACe1Q2zP9qXD5XVblRVg4nOJXp9Z3Wzs4gSFwYTCvNduYXd2gNP6TdTMRYaOMrXhAaadm9iZ0YWGzLePaeohNLmDMIiWcIYlpKS9j3juoVld2UM6LThdB2hrx32Ju%2bWxli2ZA1MmrBI175xSdGqU0Zhdmmk%2bR1OmLVe4zKQtM7mvADeiY1xIdmwBvqRWMekMy0qAu01aCRAcGFrOhyTbKb2hU0zMw13hhVovcnCUrIDOicWScxFkxBOdPOVegXYjl2A2CVhlcuFRgqwTCQu2RTbMZewt9cdLb3dLzrQJ3KnXSgcTAe6L0wkqW%2br3vuiPUeGNcRVAZDONNdAv9SwHSMyfGEss2SFL4JNls4brzDZSwLtYM%2bozEyTod/rSXABreVgh8HCSIQk0XNOGr0vs9CWSvW6g3piY7en6IFWPaoiTmdwgJThTfnZyN7fr5v2XTiHuH5UaxovZkgQ5bxhUkH0GcHcuNOfoy935hDHfyIBZBu5lxn3Vv1jXYvhwbX/651uGZ3Xz0X2dLt91Zy4uhMC91Bud95g2Oyvg1WpoFUOcxpEErHaZ%2bM2jvAVoZUPk1Tby6RBerQPPdMYrkRQbFtl21kNWPkpdrDHTxSXPUA9CBN4Aw7SjWX5D9W9P0UMo8hneLb32BO4v%2b2qCs2addp6ac4DBqrrQNEQ1oAc/276HeTJBIU5FKoAJ8rEA%2b1HCtqjrOM2I5JmjrHQC0p%2bH6FU5hnhLAH8WEXReAYovArP6WhBrGYDLRGBz4mdsXV7roJgORVomHu8ly0kH3MuHukmrA%2b6yMrkB3OUeTeNeI%2bvOdyeMu7Lh/HHWbEJ/I7Dnqp6p6iSBkT7ltEFAH2uQaZIpQUEJ01ZLmPaJ30XLG2Ay03fDbUaSIyRznmMREbTrueWqi1iTLwnb7iMp2Kd6skJJ2QytjSnXq1RI/gBR4SEKUyz8OrYanvzGrL0s6wvVAQ7nHZX/SBZ7H/fe7%2bPd7/3jH/3Mxz79f3/qD15YgqNXvvU3vvsr3/LqN7/86172jpMZcBxneP1dIaJpinsbHqrbAUM5cHwj9TjEP%2b6huEH7x2mKLUapmi3kk4c5Pjav4J4OcP23r33gD37urr99fqN76ReWwIsC7jzwLe/85Lu3L7z8zdOT%2bauGN7gspE1WSFRXtgXwinaCT8U1AYBclpfN2Lb6YR9FbQ9/cjLE5dNAlk4GF1Qy0Duk84CP8EDpq5AzswySkfRZVsKNpVKC8AMD3zfEz0SvRWb7Bll3H7iWALSF5EYYwziiA3FqWN4WnkWGuwy089uyLTz/vmGR2%2b1%2bFc3eKqyV7fYaMmH5WQo3/Qyz5wLcfWkl8xG2X9h79dkl289nrcDDsc/gNE%2bCBahzD49DDI%2bvw48I3J9CkdUETD764N0YDcfIa3vo7E8w6PZwD2KcNito7cxxsFWIHKSVVlHsLdDJIc4HZGQIGCRYlcvVxmCI7jGwpVkrB%2bmDbBVwSAtNI9h4HG0kxwxocIXmA61FgT7VP1VHn1k9MMaaoFj06aMCwaU%2bsmu9lfXkWjtUXTIDZMWOcpTieKePnRmTFpG5CEQWw3NJIKYs47uU2wGOa0fYOTa7ynGG4%2b1TbB9toWipBnDs7sO0lrp8as9qMoBmRYcqPqC71jovqudxSZO4yqRSmNVGUO80jVMmwuJcR8gaTeYkWkWau5RWgiRY2MpcjeRWAa0OGxKwnylrYbWhFpLMu%2bdJEhdH7omFmAB4TQ0%2bmiUSrMXlrGnzSLzfObJwQsHFgzgO0GisUr%2b7Sc4a215aadpcxdDVBgXuDFB1sgt33%2b58BBNMpCIJRciSOScbI7V4vwS6ay4zpt9wendJUnOWTaGw87RgXIcR7trPjkK8jHIZev/3Cd4bJgfTB8vtOiKx4XksVsCxeLtZhgVjPSyOghMJHklQfxt4d7kaxN9/ZWnHMkpOtacMt0JpnO5uaamYMejNypltV6wnXRXLOfFpoNGM1aGHsYS2QsJ9nG2g65DPY%2bpdHRM4RhC16SZ0hpPOFxs2NWeAh3pFhcbLN1CKZxFAds65HcgqA3cnrxHG3W7AtRf%2bWS%2bx72xXTMrkgLskejNHC%2b7r6qvcZknjzv23KjmO5hG6VY2mWwN/5z24ubSEMptdHZE6jVmthiYHr6xQcoAZVhk4K8GZXHoeA6Jxt1YuTjSmtxbgbhFF/M6jPIsgjNKqjpRFyIyp6Jn%2bnWNNV%2bqClw1Qq3UwiYfyd9nZvVZjVtsCQT5E6ncRgW42wjsVNQAAIABJREFULgPrCAt0EOZDYeFDkdV05W9ZAfDUD16mm4WPdqTAnddgzESropKt57U55t0msg64S6bUjYyry/NJG2LmWF8yjHLjKoO0A4thKAenylC2tIh0K5KWsfeMWQaTZHGLmy3UZeli/UmcrIhlMG020RAg72NsIJ17M74o5qqtrHQyxJvBtAOVHnpdPedsKKXEbPPMYk35Y%2bibpn3uaV4Mm2RO5yHCsMAsz1GZRJjUU7GDjGeMY%2bLzZwLkw4yTsBy1Tk1czegkk%2bY%2bdqIRDmcdtLdSjPsK9sng73VCHPWBP/rg7/%2bd/o3ZX7yQbKmveNN7r7z9h7/9vcVO57GgDjwzynFxuyjeEjEu2kO0paD95rXMm6IQz/ZR7HlfNl%2bga2w7y%2br6VANSP/0M4x%2bHHzv%2bzK9/10sZUr9463nRwP2uN33wR9/4ra994%2bDq/JuGh9RyKS1Lv9kv7yT45DCySs8AOmrcjzC/d0/2qV47Qd/fQ/tyiidv%2bbgxjCUae/umG4UV9kjA034mLLxsHnAQQQCxfyETIMoH4M9kzl1SBO7KM121XJ6uGO7xQ3yU4m8GwEbAbh7iKWPXN4uK8Jt8A5lxB7DtFtborutiy8IsqJTB2FmWmdDWB9vl8bab6954rVt%2bASHhfB9pTLmMh9GQwL2zTMS0SMhAzvDqBy4hr%2byifTDGqNPFy/wpjtoRWlsL7E0CLHZStOc1zJpT7NUjpJmuPgiLx4GAwap2r8rcAG1HphD7BcAkCtFOUmHby9iI5%2bGuoSRnARKhnvXgsEqPcQWc0qGSrZae070/nSHwzypZcJJ%2bsWZoLcxa0p8UON05xna8u%2br%2b4xSjKJB0ySc7fWwf9zCprLTZomNnz2Vj30iAaiBsuW6Zgm1X28vvx7yfuRclG9IRRroCJKs4FiTJDpu6d%2brYVeurS7KTWYCke4houC8H8LvxokCrlktnTOZcGGT%2bWALtUj42K3TBp%2bU6KINvWQ9tfy8Hko26RkI9pLvBIker5NtOqQwHB4kNMFcMdVnQMtKQNdXouMlIediVYE7L4OccQaSsLN5AQEFpJUPkMgQ%2bthHAtwngN5h3mZnMEkyDSFbDytVE1i8sYPU2e0g%2bC3X/Zr8oy74bDIRj3eWc54B3vaIOw3zGZwc%2b7u6keGYc4kI6RmhC/Lkw98p8EmydOtchAwM9Y9OFIbTJl5zUzWHt5rhaMG1FaFubkODbIEBtvMC0Tvcdgztn2BQuC9NJPkp6e1el1UJOJ%2bcu%2bNUdt9TOlyuY3aKTLpG1ZN0XVx97FpkAvADwLv1LRSdEw5k6CW2uQEhAuNOWlyqaastDidPg104qswxMPec%2bWHudp7t7PF6Tx4n3ebRi1umUxHGGunq3clRm2%2bnfzq0vQb36PnrVAsflpEwbZbh8wBI9LIC6UUc6mcrP7XbVEt/owad9Bq1WS8DdZfnl8jIBusot8qoyyx6daGzTcdFDK3QJfti7EbgPl25BooNPOdkT4QYKsw/lKaZTnRTQOtLdMr9rNGglSVtKGugyYJWyHK287u%2blS5LNBKmFJ%2btO8O7YdzeZ3Symc//elM0wH4MFnPJcbmK6dvwZshlXZ2UCugH6dXwIMZwthLwYzlJ0ogAx5S6OQZcT5Cp9GeskSRGAydhtfKQBQLTdFnmMJLHbaiM7HSFw3wmA1%2bPY51IayZiQideFx3dp2nUZGTgO1TuIB0PLYAqMFvq9kDfCqtNRpkAQ%2bphnmVgEM0uqW93kG2L27Z2qh8U8R6NTM4mMJ3FuzPHQ6qUYnoTobqeIh5wUqEzmDf%2bBj7f%2bM%2b8Xv%2b/CX/7sP/qBr3r8eb8zAN/%2bs0e/86q/v/3WxUdIDOYIqnSQKZagnefKTzPv6UkhAamnRVpco/3jLMWOmWQwWPXJWzk%2bNwox/uNnPvCZT9z8kxsfeuylDKnP40W8aOD%2byNt%2b7huOhve/5pHH3vJTg5s8jQJ3Ydy5NOScyLT%2bg9pSVtbK9RMc%2b/toX0xQuz5AUt3BXx8xmQCw78c43l2xuWxwex5wK9eKvH0YgLEyBQHQQYHdRANHZ9cCXL6U47pkM/Mk6JPQgYBA9eSSoF715H4hnDjBEtn2s6wg%2bTvlMaKzJ5N/1n6mHXEFeBvH4FrWGbP6zffigDtJ6ewkAI0hROc%2bvAq/0hXGnbaQacIgsAVe88AlJNUtNPcnyEcZ%2bltd3J3HaO3WUOsukPdyAcXNVi7s%2b0E7RGKdbZJ76DDLH8E7ISXJ2WGGRsfHxBBYzp7AOioF6KvEQhmdZdzKifWWft28wjcKQdm3lYWbWLoJ88s8MhzlKRqiN7CPNhNmtI9Q3NjBuOpJskgGuDl7Ty1nWxqQuqWdWBFnkt2hHufiMUVWqOydzqMc0y5aaa4QzDPElPzYAC8DWKkluMGeLhmU2AirW/LiFSbeXC4IEilpIZgk0zjr3kRtcLDS6%2bfUs99ChdIZP8PUJqEE7bz/st1juV44YLrT0I5ZBl36wnPQLflau%2b9dYBOTPjkGldBD3WZSYXW4OY07GXZXv6n35KvazKYqTddJZMyP2wEd9z1Z2pm9V8e2Ey4MOaAzWJGb2FiSWVo9oWO/nbNM%2bdn5G9n023zdl3IZxntotlkOQnvpAkdhpIOsJWaq7rQwP54gYgGeBd7dw7EvOI1Ro65d7pUMu9QM6zE8sY6MtkwTXLpRxwS7r3gcpfKnsTKrfaY1NxcK2ccYejHdsbJYdg%2bmixcLz5IUyYpPJAHcl/IZy7e1BNnSMs5ZeeBBZfekcjnLua3eW61ZT2RTCux%2bHt2YSeRyDOeRrLasBYeWLrwpUZF6KRPoVd/vuBoJSi3J1TbvX461CROZd/fmysetrCpX2YGFQCj1V3yXLKedao7Thbo1OVDO75dJmco3wHGpUUMms1j7QQpKA1iTCblGTUBBdr9Fz3yy65bBdHkM9yHzLu/CW%2brds9lYVkjp%2bjJNF5ooSsMeUQ/ZdzJgVSfezZBrzAO5Hhl4SeJUDNAQ8K4PWqAp73s2HS/rOOU0rQZ9xws0GnSXKRBPR2g0OgLk3b%2b1ut43nW0I6jnO8vOCNpPCuqvevWwPeda7Ous7B/a5eropfSnvb2ZPy5csE4maWkNq1mBf2PcB2XeuxLpXYqsnDcZfudmKLhrIxgysXq%2bNBj0cl%2bOAvtC41RCJCzeVFhaIhfRY38RiUkgAX9xizGwGE2YSmVPOxP5MVyZEMpUMEc8VY7Afi4O2ZpK2OiAynHSCxTzEtMg1EJUBrQndZujSQuemTIJRa34uuvZau4ZFQl17gDTLkaQ%2bml0utdu9kqUfE7T7Ygf5nf9RgCtf%2b0vfc/eF5Hf/8HkGgtKvvXvXy77nv3rXY%2b/68BMM0cgRNlC8oVJ4fL5oOyjY3sijffzJ1PtEgWI74qqXh8qN1Nvn4lLg47Sf4zD38NFbAY4/kz39muD/%2bcGbzx3/xfvf959JnsuXtjuXwIsG7o9%2by3uv3Dx%2b2dsuvPYNP9U8ZoVeQeByJy9L5Axi%2bUIF3QdSjK5ygC3QumD7D0I8cZojk77PB3Zj9G746O9reugdSvduBhjsa%2b2jzK595AkACfbVvYRnIlgnw87WcxEeVmpzKwDriHmn7qF5XBlrXkUmGnkCfgJ3HsKruonAi6pM5mEq3cCm7sZOyK8P/QLEY8TO6ShAeNNH//QqKjVl3OEz2x0T6GR49KHLGJzG2L7SRTpYYLTTxT15jOvtKq7sJlh0ciS03WrnmCfAfjOQgVE0nOyv6HvN2DyxswJOC1%2bYZJnKs0wYhS8f2MnoYMr3yDTFbPQVC2jc3Oe88ikDeO7jJCiClydaW0bVSAC1Zk8FYnojC3hXdnsJMEwXSdlIGawwBVGDx1umV55jYkGNzj%2bdjLpkQF2aqukdc5WAkwphyw2E8p632zqhZCBqOUOosPJk88kIJWqFqk41WtlZv%2bM8l6Ayt0nZCfjXzJQOuFPioptp%2bi0BE7%2bxuZP9qjiSLL7cc8mDnhMSzotpu1rOiOq8sbm/AHVj3QnUGaDlpGsczJhLgasDm%2bBdALotSUsgnzUYB9zLAagOuNPHvSnAbdW9kGmaM8lDqTnK85whd3GMu9qf2cR/XZ0l9YEad/GZFoaq1JLdqMkSlNH%2bdtgpPu9k0yWQ1bQi4uxEhn2lbyczxa2cnKlcz2kdSukDn1TYbkpaSqshRnnqIaVZvs1pZVXI1VPuUraXpBRAlstt5YVMIusl2wWBv05U1uU57h3oM21o7ks3vpTj2I01MMPIq65W16irryj7ubK3LD/5OZ/NxlUdbFaSLSlDO2TNFtLuMxFrR33Ja0GpBO7lQPc73IJYRJrjDL3fl3JA5zFvK3LnSYfknVh2Ryft4ncsc9G9n1Webn7n7suAO2/EYyOlPLEY4ARbaOUGmGtN%2bARz1S7yad%2b8tbVycDwTmsn3kc0mAtyHKdF7imYUyahEgE6WPWTA6jSDX%2b2YjagOMML4M7NFpo4iqwgl639kxUM17bK/ZYOOpwM0BKAzszFBe5dJ6DGMe2jXjyUZVHlzMQEOuN%2bpvt2p5jitO6UyzpGJdd8lZJJ/Z9a%2bltJIBu9q3ZTY0EYHRUz5ia7Wr/nEu3GPEhuxiMxELsjVnU4lQFyvr0leoq02anEsEkP2leKSxYjp5RqdPk3QayHrj3X1jw4xGGCMLtr%2bQBj2FoZKWngd%2bDONcYhHQ%2bkj5vNCglDNmV%2bb62yMoNGSYFSCYEmyFAHTvJCkSxybIsaRTU1iW8nQoMTWQHuSZcKyi7Y9YXkF2A1GIvtpTMaYt%2buYDA2409ElTa797I/9k%2b/9uq9768d/9d2v%2b6KA%2bZt/4LcOdi7UvurNf/sb/tvjB/DY4Elmec1xqRfgdfUUQ8bSsepSrhkWeGainu1iVBF6uLvPwC5fbCGvjgr0xx4ef9pD9LnPvefvfs3i59/5n77qBbH%2bz6M3%2bhu7y4sG7kzEdKPvv7Xe%2bdZfUsCSihOHG7SWQ6UTpNqSdOXaifi4u945J3A/ZqXNUQ199DATTTYzOZ3sZ9hj2vebAUb7mViFs/l0j3R2Gx4UmKUFDgpfAk35O7uuL4jWnCm7rYGV2ajSGO6AOvcqM%2bf8fAs57kEoj8YFX1bIc9n1O1QPJg2KXp0h%2bWggrjHnbVXfxxH177wImYGP%2bwi6FQyPrqlchjr3PILIZcZTvPrBy0ijHXQvTDDq9fAyZnhrRuhsL7AzC5HuJGinNcyzAjuUNJOJLw2K5ah7xxTKd04LYzcqwaj8eqaWVrNqiLrhr4xUMFdXamRsc2RxjoA/3rb84GQayr6vAfEVlkNzUaibGZfsKeIz4E7AvRwXDbjzHE4D6ECQJEIZk4GPNG20A8kmmRHgLgGnypIrStEOmf9tzdXeUiZsEiCnj0Kmm8c5G0nuK8G3VL%2bQwTK9untsLzd3mgyIto5QGe7K8cyUmpzsox7pNae2kqQDQoDT6Ca2koO1wFDeM8tMNrEKW5%2bwuPYmGvekEO0jH0B1nQVajHomIDfgLs9qyW74C2VFkqSElI6k2y7WmfFSNtUycV2W0DjwzvPR59v3VP/aiFQrz%2b9pgRlYHExprrIE7iWCU%2bMRCFp9X%2bI%2bmHiEqbkZkFqeOERjcS6Q4LZSNbKXBexnGY6peTI5W7ntqZxGlwUlGRNP7oDMclkBSI5nqO7cHqh6Vjvm2C52gKX%2bRNh3Too9gAY2BAEySb4DqBbwblkkRSrkZB8liQyvzzKS%2bmwZI10/RgDEzWl%2bz5K73L4g6Im7Ue80xHArlTbIeiLznrL%2bfaNtnweCFdRpGbeqiSTjojOJdL%2blVQCZ8FjAeS3UlbslcKdU0mJQyuWt8o/bNzlPqInnnAONXC5TNyhulMtQAnTeCoID727azPvjd%2b0ox6RoorFMSnXOOdimmVF1EiOoVaW%2bShIvWrZKBlvnIFPgeDDHNiUzfODFAFmlh244xDAl%2b6odTsbA1UpLUnColpwWkEawoIs4p/VfhpqsOJ0iwY4Aem4pttmrLP3e9bsu/LyPar0l/cOM7Hq9I37uhWfyGGdvxX6YAJ6WlEvZzEgAPFPrJVkX7Uoi5SPSKFqDllcxzmokZ31X0rpLEHRdS59gXWRfJt8SUM%2bVKdFPdYAp5UFk0XMBw/JOjZnZdJVhh0g55Y15E/sVeuV7ap%2b78qHVLpYyyJkGlfImKDtk38lESQTiBOht%2b9cB9ZY/EAA%2bzrvgZx4cz7RvcYSP627Ytx0tOuhggGnQluswgDkOtOwJeotkIvp19umUyBCQC3lkdpHjSYB6M0Ut8BCkHmqtCjLG3RC0Nz0h7RodnWjyHob9UAhBqYVejkbTw6OvjPDLvzP73F9%2b4Dff8Hy92%2b9/9GeuPPw1r/nGt/30m9517S8genqvXhRfBngvawD1g7AY3ki9Go0/ZsDHshD9LC38yMN9p6nXqxUYeAGenQBfOAaevDvC5N%2bMgQ%2b%2b/3su7LV%2b94Vo7J9v1fqbut%2bLBu4sENpCXnz4O39lPuy%2bij3U45MYV9qV9SVSP0DlySPE9%2b8iZMVkjxQUGF%2bN0LqconvUx1%2bM61gMWjg%2bOMLF010kuxPNXCYSHB35JQ%2bCddj%2bJVouKovcrYWotE1LWeqNCdrvv1DHkzdikQn0T0L0tld%2b7ZsvtAzipW%2bFh2vin61dFl1m6AzD2y9r3t15No9fnv8Mxp1Pxf05uXDPR9BeEfhGW0gf6cRDeMPH4PQ6okprybqnqY/RZIZHH7yMebiN9oUJ8nGCwdYWti9k6PQW2CZw304wS3N00zpmjRhhNcS2LmKsMVoucIeaSGaHY5n6tRCFAfVVT2zsZYk5C%2boRMmrcZdmZiUkYLFMgnWTyeXNTmYZ2ypSvyPs0IM7PlI6UaWbmdRoSqEqPqnfC4wWsile4ARdOBqhPN7oxm%2bbID05R6%2b8h91Vu00hyxFXznskCzLtHqBxuw2%2b4MFKTB1klWwY4GYuqTLcCEU3pzUQ45owiSTI0nlbGLTn/IeqDfQORhQWjsjNX60c%2b64ptV76dchKegR7wbhCZzg1gyoJ3LiBeMunSoF%2bYJY0roA0YgbsbKJz8hftMSlIZuT3RE5N112eWpCR5Lr6%2bZYDv3l8ZVJe/k3ZpTdTFAvD61LXLuyoB9zhhEhGVXJGhpoSc%2btUONccLXSKnqYscaIFZszhAeukYles7Ij3aBFvLlZNSzIIDpEwu4ocB0pOxZkvdYN1vZ9zXs6kun7MUDez08sKyW91z%2b/H0BO0Eanw%2bV7fFZdJunJiCQF5UN8sDbwfxAl4sCZWbLDI4lecmKHeOE7TKpIuGXsz%2btfchGSXN/WaTMXcTI7K5cpiTjVgbE7BqWWEdMOe7cswFz0cmnsdyErL5XtwKG60juY1pH1n4qFfM2522qpYZ2V27WivUb1psHCWFl44jYqm6vtJEWYTLoFruY1w2VRI/az7uG242rrzOmnS4IFXBPFyNnKs0pWv3zvp1sgil3%2brxu/IN8LMg/wJ%2brSZtin9Sr89/udKor0cRVZsZTJk5tbTEIJEnC/N6Nz94CVDNMzRCjqA8F2UqpyjQQ0xqVeJlCNwH8ptj49V1po8UW3K9IDuRfSsSDKuTCIJ1J4mh1p33V6ur3l2kM1aRXdI9XnkyGaDRbKMdJFIW2mvlUka0i2Qfx0kbkz25ItksptuKzSaIlptNLXRtNcn9u9KvG4UugTv8f5XMIDYgj1z6RRsm5KUQcDcZYGtjjo47qoGUJE21CibzhUxYw6026vEYlB0qUGdgaXk6vn73MslAZ5VkiY4t86FinXoHk/5QbG0nM82PQGKD/STbhcvHwDMKxcL4MjLt7ANp75gVkqWbfgP2uCZ3BKLMQ8Q4kqAhEpntljLttaa2JfHTpj6e1xqpSWzh%2bQLc3/5YgNf/g%2bvv%2bcj/fPmdX%2bzd8Pcrb/pfrzzyzV//Q5f/7uV37AxRHI9zL6gpaL%2bvCUT7YTEw0M5V0o9mIU4XaXF/O/SiGzMxrugXNEoAjgY5Pp5VET45wuP//KM/9pZH%2b//br77vpURLz%2bc9uH2%2bJOD%2b6Nv%2bpyvH49f90MOPXXnH6AY7ujPsBRlsCQ8PNmZ4Oq7CD3NMrlWw49/EsX%2bA7XsyXPtUglnYxOeePcGl3W20s4kw6FKZL2RIbtDVGri1m%2bG%2bsfrgnY5ShBcKbCeeBCE5Jsc9GLsMst2s/AL8bqeYrBFzFnq78/GRrzq23qAqUpxmV1Hl1TzFZT%2bUqHwZ9M6jbu7wFq75lOSwE17REyTjZyP6zQDzboZ07CG46SFoRhge3oBPb9fgaeR5iPFkgUcevISk0kNzfybAfbTbxT3JDIP7EtT8EPuzEIu9hbDui0aMWhRKMqZts24sa0jp7iE6Qw5wZA25HJcWSMVGUB%2bkV6TCtnOrzVN13pBOnUDf6AlLr30mHWblUY74l8HVvhfvcjuNG8wpJ1mya7zeKJOsrLKSbOQK/%2bU9rmt8ddLQnKeYVMMlCBFPXa1V8HLVG856txDe3ILf0ItnE2r2%2bG4UeNLe0iURkv27R6gOd0VGMJlrUiEnV%2bAxLD%2by3PQxV5rerkkXEVahNWp4VUlEFmLsOp/HFQVr/rR1iOp43wJJLX5EwK1Opty71MFAJV6sW4aBl4GnZ1VJp3knyJAEUeckZNo8dimhcaySPdfm4znGXezRFp6osXjbZItZ7/gv393yOP5mtonaGhwsUBAksTO2qEOZiQQdO5vJhupbeV6ZHLJeOOR7xsM71l0YdwagSsW7vUELyKdefptI9yyuV0/uWD6HN3gqDthrfYRNMiSJk8lryMivXdUYdv7ugnPXWHiTDRHcj5wHfukEEmzuss%2baq43Elbipp8tUayBGNNwbPvEiydlIXiZlSumMyxtl7b9876pVJ7ykU5G%2bP6eyblSKpR3tMkhVnEAKeHkT1fkEg4iTSk2Aw3pdsVVKCfQ27sBJZxy4d6%2b27C7D%2by/nYXCZUyUw1e7bGcFsAnh9j%2b4t6mf5yvIs8EO3kqvN3lmNytChV6vqJNkAI0Hg0p2e4%2bJ0jm5H9e%2bSpKneNZcZY74J3LlVqSln7dRACJ6%2bGTKDNzA1N6IG3Y%2b0JOXOA/Qt4yrb1kCuQbZd6jhXJOqcRPvCqDebCtBnMzqkkKn1JHg1jldBq/V6W0iZ6XSAer0rvYsrp06UYMC4gFJcG1tJK8pxOou%2buO7dZo/MeeEmonwGZ6MqRW/NbjzN0ex2MD7lSoD1Gjb4O%2bnMqOigWahrCycAcp4SRiDzPq03JKhUTitt0ugJGVsKsW0Uz3X7nRIYMuwT/uupJEb%2b9rrwKXeqcxVCwT1BO%2b2vhdiR0xeYhF20ckpnLOCV/RyVI3Z%2b45w0AdMsEHtIBqNKfg0Ofaz/dE6WAHDG73mYz3I0uqpr3ybTnnC1KUCrk4pMpjqaYNGuIR6E6O4sMB4yDsJHjVKaILv1Y//1z/3nh4//yO%2bfVYU3v2Mw6g9%2b4/aVjzVw8epz8LxaVnxNFR5J0cpOUAwPM68RFXhiAOxGwIcXKDgvem3L8w4PU/S56psCR/0ct6YBnvl0/vTWZDL47X%2b6/cjzuf5L%2b6yXwJcE3L/5B37%2b4C%2bfuPy9r3n9W35qcEuiKUrJCvRCkjhRWF4ybgXi67psU3ge2nctMLse4ZTpFJs5PvVkjiu7EeLSMjIHgp12iBNSmswGys9EefRUroUYNRKpzMwjVwbvyw7VSHZplhtSlSwtcN%2blFp66xvzEvFsu82vQnnR%2bvidWkupYowOwCyZ8DurL/rzBe7mPWfIu2hvxeuNhiO1uiiMUAm7Ez/1aAb8ZYXTrOvyQWvenkWcR4kWO1zx4CcP%2bFL2v7CKPM4y2O7gvj3HcrKCzN8fuNMR8L5FkTEkjRhrUUPNTCWbpabI92QSoN4DTsQ7eniwdaoZLWdY3%2bVNCkZ0VakqdO08kGnjzdeeEYHqGVOac7yV4TCQgpGgzTHmemXkQU35TtxTxxrhhkiOnr6K8B125EWBG4Ghlu8mJyN95gFnnELXhPtLZYrkSwPcbpwHI6svmZXr/tQiL1iEq431kcYJZ1UfDCzDrHaLGJFHGlxHA1wa7UkbpLEXQ0LgLdqoE4JTuu3Pz9hiUWmbYNzsids7lQcYNGGTcRQIkha16Ld47ky%2bxLjrP9iX7bC1a51U6SFCrySDV2ByVNq/tAgPP0rif1WFKcZez0D6PXlUmJkzRLYyS2pJKQFkpOZSc1oB7t2HssuFeN4jzd8YClhMWOng/nHro1G06zGVmS9S0xYBR83zXYvGWmTm1nE1bdIfn4OR%2bGdh2h/2kXZXYd6kvJXTH%2bxZtPm1YHWDfcExxIF3qjWn8ySYTjK8/u4dwvEDSqghYJsPOiQI98t30QsCM6e4FuBtodyszJsNezpAF/BGw19b17aI5tnAAbYPWFEtlIfIyc2aJ59QG607MvMrMrCKfqmTS51Sc/GtpS6udfrNCskAtgclUM3U6N5eEq0blkwUbMpa1PI06i/l3kpkycHfPLu%2bqZAl51muVsaWa43geYLua4UQYeE4KfHSd9Kd8oEP4topBuYzLXNnlO5rnKpUinF7os8ikSjzSLQKe8hgmZJIXRi3XUK8QUZeemYwv0JijhXq6t%2boF0qIrTHyGLWGL2xHdYXo64c0GwrRTVrJaAgown41NIuOsJSmv6aNSa0kQKzs4HsNMtmTipT7b6EG7ZjrO0C5yq5IK2%2b77TOKk74V1r31ebEC5zIoC46CNRkog7Wn%2bAiOMXEAqb3u1cqRvWrs6WzEtgXebm8h5OFmi9aKLc2JhjMyekUcHvY4AeLeaFPTayPtqoTmm57oD6wbiyax7BObuAKoITLYjK4Vm7ShjetjBQTTAUdKW%2bAb%2b3p9XxPtehr1EnbzYzoVl53eFymU5VpBpFzmolVV7Tjllgt1aIDKVZruGeZJhqxEgYTAqk/N1ClTGM/Gct%2bUf7VOHvKMCe9sBwtjHzfT4iX/5v//%2b1z4fmcx/8uMf/4f/w48//M5/FeNoMhhNAAAgAElEQVRS%2blQBv5oXb67Co99jZUuTLM1PUo/xdH%2bVhditAFfnaXFXK/SCG3P4kQ%2baxhG4f%2bwZD8/dBKqfffYDs/5f/YsP/h/f9oKSPt2h6/336qcvCbh/xzt/6%2bCP/qL%2bvY%2b8/o0/NblFf9kN4F6m34IAlatHOIkuoHvfHMOnKzjwbuIkvCAOHZ8fxPg8pvjKcVlFuFx5lA/RQYH5TU9cQ2jov10PEbcTzK962D/gstLtDPhSY/6RAJl4x7FVWKZUk7FoXokAr7/cx4du9BB4jpk9g6k3xuzpZ4B777GB406s%2bwYFyVt86DDBp/dVeP1lhwt8bj8S8E65zNaoisV2goQBqs/l8NsVjA5pC0nGnTp3zrBzkcvQFjKt7KJ7MRbWfdjbwg7lMlsLAUUHuwUaaRXZHEh2ctS9VNx0OjbguYEra4YoRqn4QbO8gjp1wyrA7hAyZkASrboqB9w5IIUWvMpnSWc5wk2Nu%2bchm2ZyzjJbqYM8UEzIWHuY10NksdUfFxS7tArTwNOiFYiLjrjRTDLEkSa%2bcEXcnBcYu6RCbmqSGawr6dk3W7h0nDaTaQaBJleSMuLyNG87kDLQvpoftB4JgN66hUp/T9J9LRng0j25a01ZVqULOz4vnOdIJDDUJBD2zA4ck2kUWYAhFEqCONC74Fw%2bVjmYz8mKCBCYeIkyGQWdevGz3Eec5p3L3Zsa97N6Q9G3O7eds1YQyFoVFGSW7mwDuPO8rG8EmdSxOkDqnptAkeDdJWdxAM0FbJZtIvUWPFxrT3FptPLTFoDsq8OLS9bE7Krz4zEqOy3RZaxN9sg8MyFMKabihYwGPNdumuDQjwSU9y2hIifE3LgaIImjnAa9FMjquhAHmrn/MvmUuwlHmdvfdNRZEQcbKwGWLKwcXGo4R8qa4EDsEs3ykfdGqZJbeeP3LOuylaSAGXtffLZNmYwD7sJ0zjXWgTeowN1WscrAvTRh4aM17KUywFpaGiftRDNWOPx2mT2Vv5Xq3lld8KazDDOnknFftgFj5Tezp26%2b8814IAL5o7kvAavuukt%2bPldHGW50lQnqVVvEKSThHME6wXA%2bnclvbJd01MoJoJmoiSx74SOPmqZzZ4YzflcAtIWUlYgMzSDEmIPggnptglrVrHNjbzKe9tGobyHAMRJq3bOB/F5lUKoljIhnISreiUlpNKlESAlORrc1ymzUYlJBe9My/a5KmsCd8pj%2bQqmuCAPxhefpe5UUp3MP7Yqy7nfMrmqMO12F3Arv2juweiqOM0v2PJdgz/HJEE0GAHC2UOtIoivKU%2brFEBMy7wK4PQseVY16sxiIjEQBvE6KYl817NwmeQdNatWtX5EVQgs%2blUBTXoOdoAB2ZsDlSslAJLnSL5tLDLXrfDljY9uHCzoBsd1k4GdWdxmdvAIkaKKAifkytYZkvhRbeeU%2bEoNVyTFvtVE7HSOqZCiiprDtomvnam3XVrQ4nTr10O2pAqIxmeIwbwmRsd3z8cGaf6336S98%2bB99133f9sX6t3f/2hMPf%2biZxg9/x4/c832fehx4rp97F9sBXltL4W2Hxc4M3kkNhXeSek/GwLgS4laaFkVAXXviZVGAAWO9QuDzN3L8dV5B/1N4unPt0%2b8fPveh933kt77vE1/sHl76/fYS%2bJKAO0/38Jvf9Q07D7zz9/TUbOZODaffnD5VwdYDKggdXa9iz7%2bBE/9A2UMGn/keDk%2bnSCoZxv2WMDFdb6pSGRmoiGSYjAkI9wvMr3moXiqQEsBz2d0Hnnq6hnsfmaKbehJEarei/9DLlGmcjdr76ot9/Nm1HsIwQ5oGeMOlPj7IhEBMkkEEb4z7WXjEekVrziVWy%2b517Rj7gwXMpEutYVWXsJYKx/WXwa6PwO6IAZW3PIRNIHimgN%2bpYnS0Au5iC5lyAF3gkQcuSirj5oUp8nEqQap7BxmyyhT0h9jfLcSqj7aQeVYgXXioNSvoeZkAeG6ypCz%2b3uo0w8%2bU9gsziAAdpEiMKo7mORZVH9GciTjU%2b51%2b6lpuBqBzG8zc3wTutGw8I2jVwToCy3yaIRJd/MrPWlGVVlHeLoEG05hjrOCdKarJxK1kyGTXj7BzqyeWktwIvG%2bX0tz%2bEsrvzlk2MhPd%2bclr3BKK1njq0lWaYQwKNcK2QLDJtjsZB1kgLjTwd35HkO7cYoRtLVkjsShkgDa9r9O6c3ZFfJwRJ4Ma0xxd0W4W4unuplsMsuJ2luWj1INSwGosFnPnb2cBdzKh4vfOrQgw6p2gO%2bhimITo1JRhonxIZDGOXHRA0AC8A1QymHFFxUCiA6dcRufqUNltxt2l5kWzDLwl605%2bK6C9lDFTOg5LbLNbspKUW19JudcK4Mzvnd2LPI%2bCh2XJMf6GlpAWQOpOJjaRLCdOEoxxX0LuDebdFu/XNPLL56Xf%2bMzDXrbAXMzhN4C7OdRI4Cq18aVETW51h4c44L7s1IwpFcaUGlnGc7jATnHxUYxE2z0n2ygXlJPKlBVFLhkXn1k02uZwVXYpkjpIiQ9dnMzuVKUuS3GJOaeo1RzbjFvdOKudOh939hfO/YR42sViuE6F1/hiwN09n9O/T9BADbEFnWoUVIwmmpiok1JRIGjUsYinUvZb9QTDoiVgPazX4JIzuc9cfZatWpP%2bLZ2OpJ4P8w58ScbEoICOFHw%2bH6CoKjjuVPibtuu0aMEvTjBMOuhUCLi35W8GqKoCnQVMco3Ji1K1hPS2l7xxgBNRzqcBM76qnIZ2kvR1J%2bOukwI3uK56yxWM1wkW92I2V8pySHzIuBKxhDwMZprjwbWltRq7EaztYjy0PyFgzzGMPTRrBcYzX8gLLXnHuFvCL%2brrc2YltRU9k9y4AFcetWTfyxXXVjz5FZl66T9FFjMUckHfENn1VQKlZSks7R2BadRBJyMjX2AUdNCyWALrnTANWiimXOEn9lGmPaAzjIF2atvpzsI2yrFEiBnJdp7L%2bMeEo5HnoWHWjwTt1LUzILvdKTA4DbEbjTG3Jcr%2baYTuNt8Dy8fHQwcR7r2IP/z7//Rjv/cbP/nqf7LWyW388b7/63MP/%2bbvPfe2N/3Am35qPIPHuKqkWhR/rwtvu6HSW97vtSHjyAo8Tl17kRZi/Xgt9fZJ%2bgfqInNrBvzaYYh6Cux96NPvGT71B%2b/7yG//4Eug/U4v4A6/fcnA/Zu/4%2bcP/u1T3/Krr/yK3lvYkD4ZT/CKRnW1hGmD9PhqBa17E3iBj8lVzd7FxrzvH2LoH8jg8KHPcynpBF/RqWEqkYYFbqGJCxgr%2bJbBUFn29BbTBBd46pk67n9ZjPnUR6sRotFUOYjrmNmxZGmA117q498SoBPCi0hWH50N4zBMll7v/M6xfu4cy/I7A807kl/AhmmvyzpmiVIfhgLazwOB7vy8I4L306BAMfAkcDK4FmJ0etUY9yfJOakt5DTBqx%2b8C0mlg9k4Qe/yFKPeFl6WxThpVtDcVblMskd3mSqyzEPSipEtSNwwKVMukhliNA4SJwjRKdR7WToZiWspMOTDyPq5gkpCwWhB1xDanZGOppuMIk%2by6mSuCVjlO3Gh8cWh8Ys9u1sldiBN2fsAzUUmM3Z5L40AzVmGMUFoVqwx3CJZmXDAdLy2sXYmXxHPdCtoCUxioii6xbgvLTW1AEwmL6GFFfeb5xhXlBGXTl2sI30wI6pzrWExOAGxAG4WR6mu3B6maxr2JU23aqHloZHAfekoU2rEwuoIRS%2bwHZP6IZpTynjKwN2eV7Jzr4bI8wJQeXrHLDrp0Xn9hgPeBOpSTwjAkxA77VSkHWzLMwlm5OxzLAwgEzN1a8ykuvJzFwBJcG6yGfcuBNyXdNibFovCGJ9RqAxc5kSOwNjJISSbKUkD84VfsuJhRYRuZ4GIzU7RHeO84rUyekiOp2onSTWDaOBJWWuyM67Q8Lgy279ZnuLaYpMFviICfVePyIBzI6tNa0NuLhi73EeR%2bZZcUXaiNebZtPL8yVnr2a2rOqickdXYfGHeG5q1mmufI6aFs/bH%2bs7NJbhxbfU2iYq4umxMJChbmodohdTf6mTCBdy6cllOeiwole5PDARf/s5VBE6mSwXJYyL6altCuOW%2blliNZUcQL5NKWy2VoiIWrgFT%2buMbeD%2bvvpe/dyQHz8F12d4d5DK8t62giUGYIo/n0lZUOqOWt2TgqXPOmGyDuKpaRTMqkNoqoc8gVe4oshktB56zEwzQT7poRQEmMXXwfJgWmubgNkk4tqqrSCMKQVCeZFvCpovHu0znqa/uy2dh4Z1cI1CwH2YniGpdjCc%2bmo3ELq%2brl%2brl3kU8GaDZ5Josi3aINO8Ks95nErZKiuHCQyciIx8tM6w6YEBZDfc9c7G6BOLFDniWY%2bK1sVsZyQRm1Keloo/hRCV3jM%2bR4NTpAHm9K2w773PCZc66BqUuO3D2VUWnpFMf2t/DlYSv0HNJORl%2boRxGEihZ4xMWnq433Q4mQ/3ekTZSlgHlMSrBYXIqPivBPJ1kBNnQ8pFgnRKZkGNOKtJc9n3Us28nIQYug2%2beo7bXRvU0RqWaIg8bIpHZbqpEhsYSzba%2bb62Xlu%2bEhFIcY9pooMpJI50A4OObXl/8yivf8ss//eQfn8923//oe688/MYv/8bXfOcb3sXinSY5LrQD3JuneMVOiLAFUEk1aaA4eS71nshCHBdpUY08NK6n3kGblrU%2bBjlwfVBgBg%2b/8ZkQL//kjQ%2bcfuFf//hL2VGfT29z/j7/nwD3j1995Cd2v%2bor39E8Jij30bpXk0UsN9ZUDsRXqzgIr%2bKmdxEB3T7MPqLie%2biPYjwzbiA7zNC6O0Qr06xzNBp88pkG7r1nJufcblRwMl5oRxKo1pkVq9MIcTRMkWeeSASqTRW3OwtEgney6Q8cNPH5GxN89aWRMO%2bVsCSLWY6Iz79QV9IXlbs4vEZNWbubCmjn90yEwH0n/QDNLQ0yGnGfjo7ezpWG%2b576BYpTD0HDh3%2bNfu7PoVIh1Uh3mc%2bjyCtYJAUm0xivuu8i8tou2mTdR%2blSLtPaXmCXAarbidhEdfIq0iaBu4d6o4JFnmGLK63m6d4fa6MXf/cCGHI1sMVOerUJfh9poiParoV0JSkIznWvmvm/z%2bh9a6BIlrPvYH23PDu18DMNrCQ7L5jWJaxZBj0xoCtVeY4F0zrLbgJzArckJngPkI5ThJahrfw2ZfgzLLAE7fwqzhA0TSbD7L58FiaWsuy8Wpl8xCk9aoFFxwWMcnnSnpaJwb6Inp0LFNyJ5U5NoD6oMe1lrGPPLCsKcs%2baJKleZQIQpqzWSedgXqBXVRmC0mT8lxlUqWtX5xjn0uFkNNS/fjFwfqcWwPsheG4QMHJyNgXqDQVB7nkY%2bMdbEYbTBZ8aE74G3vV2Vd5rF5W09FwpcYGESxbM%2bpEZWafzA335bGS6GUvKf3m/bqJjc1CVJpUe8kxwvva7BlmWN/F4Zxs6naBCDQyJyrzAVrpA0ggdBl/KdM4qU97PXprghqfyGunWzHlH2EriZh2NxbvdkQpL1Yzd0ulE3WrK3a6T3TjtO2MLSiY5cjucuIvOmjEFzFjZBOaHCaI9l/ZYpzb0eY8lt3MhgN9NOM7KrrqUzDjzD656MDlPNUVoNqpSW%2b1318cQZI5mqbh9EIwR6nSQoS92w9ZONjzd2aeShSz3MRogrittvE/RWpumno4/lEOJzt7Za94pW%2b0ZL433zeDUY5OA3AY%2b5QvyzZwAFQjrVXlvGeUxtRpaobrRiO6fFVMymFEKUxXbx0Y4UUtIV0FlsCskgLXR3JY2TfvWSZqX2rFOQuV/8yFajS0Fnsa6c8W1Vc8wngaIghNh5PlevcyAumnjWfmEMc80kLVJK884RLNRII7p865e7q4lOIOFlZxovTTkfqSv9uX9uwyrPEd/rhIa6Vo3y9k6amr/mYVa%2bgJzRRPG3JgRriAsD2a2WR7X6ALxSPokXpy6dEpiRO5CUE9pyjIOxEOjXmBKj3pKYBxQ58UogbHvxO1lArRaKu%2bbCJs%2bwNRvY786wq2Ef5s2PuhIQPJQgrNZ3xRUj%2bYeKg2VQDG5EleaE0mwlCJiciaJWVqXcpFpZ9mwjtO/h0z7PM2wTV17kq%2bY9pMQ7Z5OinMEqI8niG2pjNdr1SLcvePjH38WH3zz6Yd/%2bce/77H/5bw%2bnkmW3vRNX/3PHr1yz2uf8HDxeAJvnxaS1Qx7jUBAuxcDn%2b1nyJMCn8hDDLO0CCLgwdPMyyK1sRwR1wwKPHXLx2Ka4%2bYNPD3%2bg5/95k/88Y%2b9xLTfaYB9Hr996cBd/NyLt973yu/4pRufp8VBgtHTVbTvX2D4ZAWd%2bxcYPVVB%2b4EFJtf5RjkzJeBecYtR5ONkGGPk13Hzcyl6d0doJTOnJpZU7k6k%2b%2bnRER5o72GeFtgyLcLRJMNuK8DJWK3/OlGIqGkONxs6yoLrTRLbz8ht1bqvEelmcRePFLQ12ivZwGSkQ0zTvmNAaaurjUXwhyUq4mcC995WiskgxKi7QLNfEZ97N/iSVSFoH/ZX51TmAhhQHnTqSWsNrpqzjASoNtQWElWkiS9ZVB%2b5/wKyyjaal2MUowSjzhZ2D1IklRjVIMLeQln3Tl5BnnhImjFqtVCW3Sgr6pGpNo96ATXW%2b3uNAP4ZDhuukyWjWN3I4Jl6HmqLHPOKxzmVuPFwIKIHLQM11zpnvlILZpXOln/PdBigTp6MPScEdb8Q1ntS85GRQSGwqZey8ZQqOQc67sPf5Vp5edqhEydhzOmJWz6OYFtGeJXWxHajbtKx2jXAoqW%2b7NwkAJUJinqHqDBwNdBJ4J0CUVnuElDL/RhPYHoIByiXFLBbBJcg3AztqIJpU4Nm69VMglOFcRcmsxB5TH%2beossgYnOX6VRDSbTErH6u8Dk4TBbK%2bDEToGQNLF90s9NgmdDLWPZbdRflxQJpPw58k0WflEC9JVjiPmTdycTRWi1eMLBNV77o0z6eqRczVwTmU13%2boGPPctvQ/kuySifH2lgJc/fDboN6cgJaymWkfnCFySQs7jAn0VEmch2crxeHDq5uBYNuM4t%2brKCdk5STCcKthgFSdjyUsqQ4jtQV67xNdMRZobp4l4STUjSucG0iGk5KRCKTYs6ZqlnUunOfB9wlP8RGOfEYFwgrE%2bHlDSrg3Hz28h7SvExmt5bsxg5i/%2bZ8/PmVVHPbn9IU9plN4tWW1lE3USdYdBNNYZfzHBIYb7ezeVvsY8Q%2bk%2bonmwy4WJOzBjfuzz6A51lmVLVCO5P9PeOlsczaBGOlA9ZXOlTnvohn6DUWyGddjGkdGc/gc5nBuW/BQw8j9L2uSEwJrv9f9t40WLbrvA5bZ%2bo%2bPd/77r1vAvAwEOAkghMIkdRE0TI1WaSlH7EtRZItanQqtmQ7KacUJ0pSkSyVqJTFpIo2TckWVUVWEiayqCHWGGtw2aTEASAJkAQIPgxvumOPp4czpdb37X16d7%2b%2bD5AIOH/eKVF4t/v0Gfew9vrWtz6%2bUkaXPeraySLPqKHWRFWeg/9r%2b5TCbMPHMSYFE1J1y%2bd9AfbcOI6PkxM0GzuSsErPdRlbqWEPuI%2b9YuuMowx8gS34tJDMt8QXPo67mCVDkcxwI/CnBKfR7CEZDxC3umLH2AuVWedAQH17f8H/5jhhn48YbabrDK0NNUm5zVoWZtxnxdV19l2kJn5HPM65DdHFXm2IsqbJpnotxOhGZ84WxGvk85LFmunJFfFi27MnxZoIyMmiF9SoG7Dvy2890c7b45SiXx8qO855yO/ifH0oxAXHK%2bYETeQ6R5JgK77sxUiqgUcNHRfyZIKgqf/W4kpLy8dZWYrchImo7KPSTW0djqJAg0x7f4I8LxF3l5VRLWhnMuqqnShQG83QOKv5EMRax0kpxfne%2bmCAf/d7f/KeTz7d/qN//pMP/eZp49H3/cKzv/Q3v%2bWOb32igwv7V%2bGdb3l4Q10XCyLvyYBRE%2bWnv5R5SS3EIMtKytfONUPv3MEUx2GISQlcJWg/9DHq5xglMzz9bz7%2b37ztzdN//eFfvG39eIvp4AV99RUDd57lNW97zzu23/cP3%2b/93OIej5Mt/2fHBYNGCVgnV0L4ES0aOVUpwGCFMP%2bJIfbPRRj5TRx8OUXk%2b7jz/AIZ5QgI8GR/H6/Y2sW%2b18To6RyXLs0ETHA1yuMcJxn22iEORjmNbeCfy3GGot81zShdZAKZwZbbktVYTmzTcSDHpI6r0VbgzkGH7Dlvh7IXGTiGYQXib3radL8Q%2byWg01OGheWG2fAPxoUeu0NdvzKpbbMYWAXuQPCsp84yh5TLUHpA9TrdZQKMk1RtIeMtpMMMW3dMMOpsY/dihunAR%2bfcHLuzAOlehk5RE5nMoj1Fox6ic1DD4c4cWyZxsSqLbhHkKeDY3qdEJ00Y2n5mgXsmunf9lHMu2XBbjrx6ThycpgWmtcBowZ2BlTiTwL3mC/CXgdgkb6a3KPJEIJfPtOEFTHad5EjPnSC4sS1gXsbnufq5r%2bAYI4/h7%2bx1zszlELzz%2bkn6sRLqEjgoSBeOPVfwaRs9f2sn04o0Mzcu5jlSgVZlHbKfvUcByYaAM59VkzIXIcI4qYe81fZbSQj17GTYJULAtjqnzametF1TcCRt1xQUsRMEDxqghdwpLGMfuLR8w3yFXgulb/QbpwwtK0y8oYSFPV%2bze%2bT1JXNGojzku0eIDtWn3Up/rsVH2OrvoNXMK3eJlT5rnhknbutOsw5MLTNN6QcVLOKSZN6QZbalnTAJVDSloiZdx6Yrd8pk0MVRgtqZpjrM0K/ZhAoI2mu0lDSgbHexwH5IIKNlzavNgJWqH5kQBRfCvC4ywpVPO5lhMpNWDmPWR8O5hzO5Su9S5oXcaq1xyruyH9PWlIy8Zd2ZzNoWe9ebDyr9Ryw4OSpr1WpxpVkbZ3nsdeAufZiKDrPYF5AthY1M22QRMPF%2bXEJg/osgmddoFzBRWiCv%2bXLvHIVtgirBhEj0TNI7bUI3TW5yDyysxt%2bbwkxSlIl5FmMgNlGkWz02Ae60tiwhspBt6rbdqKJJUKXGnde5Zej%2bwUiB%2b1Y5wFFSF3DPe2RhJiZK8ia56CgErG8rQBUQeQLUepW%2bndaPXGT63gCTvItgfiJVWGVsCDgvnKDVPCP2rp1QCyZRLkO3GZE6mn/zGCEs487v6SijMpgiL9CIM4yTCO1mgXFCwH4i3u6jJJDPllEOdZJhbyJbT5cZm5kgoyJrstQKkc7YtJC2cZvhS1oF7ssO4pmVET9hOxONe51jGyPY9G2nbz3paE0Olc3%2b2wBuacY2iVTsNo1Djx3bHLDP3xK8U0LZ7vUwHgyMHl4RNQMjoqj3PYz9LrrFQEG70bGPfVZCZaXckbDtNQPcs8UYEf3655THMFoZKHkT%2bljQ8tEkotooqNRWYRQsLKSAYo3e691YCjGlJCybPhYLoMUK6amH7QbxSq7PlvI86kCLEifTTB3yxOI3wNe9NcC7vuvDfzsPWp/6/G9/50bW%2b6c/8Gev2Xn1Q%2b%2b/ci/e2tovy0la4m4P3svvCsr2XGzuJR9tUpZ4ZqzJqNcWWXmhEXq7TJs%2bSTGmwUMJPHmjwJOjELPrCWpX00cOvvCR77stkXmeAfkFfv2iAHfaQs7af/135oPu60g7D58O0b2HFXHMVYhMJkLnnhTjKyE4nz11I8GrLrXw5PUE95xtiWb1xo0ZvnQ1kARVJo7eeY7VPgneJdAoByMYkVBoI8DhQN3UeRNkMndakWjcJfwrM4X%2bigmqvK77L7Tw5I2pJqqZyX/TcyLbzvOQbRcGmgzmQKUvUsbbMOq8v3bvFol8BrzLPvz3KEC3l%2bPpqwQTAeqtm4GC1bjjwIPPUC6LBl2zOvc6EDQR4CkUeQ3JrMBDL7%2bI0ThBWT%2bLrfMj9DtbuKeY4mgrQu/sArsJq6hmahVVKuse8bmKry/Q3a8B5xaVvllujre0BtztdMpJbybe5tb1YVnUKU4LzOoRGvMUKWkEs5HRFybbuPjIEzS0aLxQv3z6vHJwrs81NDivBWiSmdX6TrJZVs0edx1eSNKiiR7IeC2%2boxYKWKGu5jsL3k402VY2c41WGrOgfRUnCLZFLkDmZOx99PxSqqtyUUBpjYzj5oIkqVVCmrrxc04C/K%2bAD3MjTEK1C0YCdWrWVzbHIpFsO8G2MctRlo%2bgf646b4bNe6LvpSODtrNOPcJkoSzm%2bkbASWtISmmWsolVNLkiWZCpniy9JrquSy1YFCZhtrRzz%2b4fAtzNKkk07eJAwQVEhumcTu2aUEoXampGA49MvBaqKj0WhdpwEy55bHTLtmCLa5nI87Efq27bsL5G31y1IYkIechOEsQWkK%2b/Don4mQ8l%2bLcc2Ob9RAs8GfrQAnhtU2tjg/FLJ/tvmpzIZAjwuSuBOzfR43OcMwms/EwcaUzkgLMxx0XeK1nar2gzoFuIYFPls4UZJkYW4x5b5RAB2kgw4eBUMCn7ZuAugN56ttsDOA4u/MiCZWG%2bGdkMA8RBIVWICRZkxDeuMsTzOv540u59FjGrAf6UlRu1gYgTFIfLQHXwUuCNxzUSGfZlAcl1XajookFtKa19plRUfQGPU6w5jYaf1yIWkWUgTLOdd%2bxtU8/OYkwZKVqU2PabGEphKg%2bdcog8Mt7tMpgVUpBJWYrlk5fFhh9gIuhYF0ytkIWQjuHXl9IVRkn4OfdSW0gF4sO0rZWRnc/13yzIRAeZ7SrqxmO2WmekXYlUJs4wSyaIm9ZK0l6Xj2QyRNzi%2bbWdW/Au6n9z/Wwz1LlT025zJLp0oplT9y7ZIHINuvAp1N0l10JJ3ChJaWRDjX6Lg1mJMu5icjxEIzZylnXQLoc0o5/Rvi%2bTmXhUl04xL5ygfTGU3Q7SNs7XRrix6GC3w5DqUHJ32ttdHAwLkcawHVrQPgm7aOXquS%2be7UEHxXQiY5eN/gnLzmgF54eQn/uYF7nIufiZTZ6XqBRxBftCr4PmyViYdgHtOV6fX4wAACAASURBVJ30AnGVo6adcsvteoCsLDCYlDpWesBuOcOBF8s7TcYhet0CzUYN49fg6tX/8xPf8t/%2b0MOf3TRm/PwHH3vNf7y2%2b553/O3db77yNLwwKspLJbxXXwrK9oxCY51zro4yXDag/SjLSrrp3HmUeVt3Rjg5yiUZlf3vc1c9XL0BNJ7pP/LYn1/78HN/%2btqf%2b4rGqts/rp7AiwLcebR73va5X7r7ZS97t44O1mfRnIehoCsRepdSeFGJ6ZUIYc3Dk1cnAqYzZuFT5z6d4sqkgfSYANnHhb1UQLq7SUIgddUpE79CBTL04u3m6iizNvAyxHTfuSaevDaRrGpqZ6WDmb47n/CDUtjvTcoQdmTVoi9B%2b2ntp98PsbW1BDHcrxYpYLebLAaYNGacXFbvjWNEgFrg4dluih3KZeo%2b/Gs%2b%2bsfPocZsKr%2bFIHjK2EKWmEymeN0rLqIId9DZm2DU6%2bDOYobBmQh3Tj3sn1ng4g6wyEp0ijoWTFD162h4WsWQVQa36Bu/JLoMcF9mlPKRUvFIr3ewAJKVMpvS4gyTyaMn281knDKQJCu7yfBsji%2bJnHYzgysZ6tlck02FCbNMmjmETXh1L5GH4GRd%2bbA7SaGGO5WmUKMch3qWUiUsZnSV/8Rpqfp8lsMmEyKrvKVXP/eRaozmmt3zV%2bc2mJd/r/u0u8CdvxUixEQObLElAoqVBFR7PPM5q6Rys/1AXGckWcgkhq4x85x5yL4T%2bAlAtwcwt86KqiJNMEXH3HtyJ1tJ4HUiJ2TvevVIfsvjjpyFgQvmLVssC1Xat7Ey6lQH/PEiEIcZLn6FdRe5jM6jdoJjk5AwNDXz1LVWAMYdqlY7uXj6m4qi4mNuWH7RfTvVWKuET7Kq5sbFvUY09ZsZdz6nxXGC2k5zJclX%2bkSdbKEuH6mbHsgkTBtEm6xK0fl6q2Xnof%2bPJmkIH19w8WW07OaWCd7lHMZ5hsek7MfKeqRmQAW2TxuRXsDnBrizndsiTVWigqbymwvz0PYWklHKIjhG76EJ3GuAt3KWMbdeY7Eyk69AmYz0XVN5lbvscqhh1WXjesSieTTe4HDXqvlYDHN02wrasnqAg2GORs1HFCnjzr5nWwePwXUsxxuJCPKDU8C4ZdxPk%2bHYp0f2eYkFmTALbNULqapqZWZbLMhUOgWZ5N5Vcy26dmqe0RGmnnajBenbWkOfuamQKmywBe78%2bYLM%2bxYr8wlY9QxbLJK/Zg9jJjTayEUwRF7SJYb6dTLrCt5L4ypD2Qs93fmk%2bPkgbaPNrEizKSOvund%2bT7Kr1miLvt0%2bW7rR8Dnws3aDixSNOVbPSbT/BOkKUN3P%2bTtKZxih0Neh/59%2b%2bHxXvbpNnCgwDrpoikTGR5P69sQTkH6w6KCRj4RMKSrJjAXvDpMuUQrnb3sh9nPXrtd8JiYSxn6RtSD25x10ClOgiQvNsIOWYda5mCBQl7Eq6KAU55/lYiCst9Aux%2bindIwxU44UVvIkEZXFDbmO4nfUtLMAGyuE8znLuzUFltJFoUx7miMtSonSE7Q3O8q0s59xetghyeazumqAI7OC5bCz0wpwMi3EZvIb3xjiv/jl7Jdnf/6Rn9zk3f7TH3jkNZ897P2Dt//wpR949kl4gQHtX3V3UNI9pn%2bQe3W/FALuiSEwikMc5lkZhR7iK5l3oQXs50A/81EbpzjIIzw58pF9fPDIub1nPvSr//2tHWxewEh1exfnCbxowP3Ob/j3//jVb3zgu8m6j57z0blngcFTNfTuVlNkRqLH17TaG6UyHJzJpKtRlZYHaz87xH%2bsd1EeZigDH3fuLbCg76DZhRf71NMx7r00FWu5i/RuZ8t1B2aHrSCQ7koVMWWw7M1atp2Dy419fRrb7RAhbevWNgHdhn2X89hxyl208zcbmEFigWv7drLVSnOU/7BwVKOzei7KbvwgF6szan%2bfaWfYNcDdo869WcPw4Cr8MJZCTGoLSXeZBd4gVVS30To7wbjdwV3eFP1eiHTkYfv8Al49w1Y9wDQtsVXWkdM%2bqjNFMw5lFU%2bdOweMao0kjDsRDa0Z9Mb4Edl2bvW0wIlQ1iapkpM/GYW5xkYYzpRnZdhuW4q8erS2KBOTSJkUSncbOreYnwlwX2uZ6/DHAj2OU2L5SImUOQH/pt2lJK5xZiPQdQogifaeixUmwxrafsZiL867v%2bmazXd2EWF3tYsBW5iLn9PlIjUJu/Y67VxVNU8O%2bvTepWOIAevC8BsHEe00KqeR6A%2bZwZk2P/seLBvtYnObgErwzs2C926soJsrIwXeWpTJJgPyOvkZHwe178NZKqBJ%2b5Z2HlvIid7wcuw4koWBnaT5WykYxGs0yaqSwMqqsUyy9UpJUuzUTASKXsbynvUlSN6LMFO6sKY0pXqnmGGEJjpIqiRJ%2bw5sf5bIgPEoN0NK1QaFjPKBE8Ncy0LSgOGdZoDBTEPN/J0ACXq/MxIit04J0iqDINaAMXBiPd/Zjxp8hj5Sh4WXt%2bCCd8/H/GSCi50argc17KULHJjIkPV7508I0ukWYyU%2bdvByw%2bkc185kOeZio/oX30QmY6wp3SJNyyN5aOQzFHEskU1JbjX9smVcXMbTXFyE3FtU4K7e7QLsa7mAaL5XAe5msWBJUXGZcRZSbbLjbT5zlWMMJP8hUDcWQ3hUHvKlRvJsRE8eN5n60FjdGgvZDcunSuN%2bSiqPPAbKMeNaw0R2yfjPsF0vxce9WaubJHxGu%2bbYqi193XkRlMKk4wRBM3YimoZhZj/LFZDTatFKSFST0VfJh2ysdGZAKC0huc0GKGp0J9E2KfKgKMRY8lC0y5J557EmmX7WImKk6UCaiTzJTpr8mzlhGlezE6mPPPPQjBd2aBK2WB6%2buAqpI9ym6ASvxbZR94j2GfN31LwPUimQIT7vXMhb5xUZH2VBKyNC9Q4aWwrGuUBv1Rmf05FUInUSGeUCwHnLdlAyjjNWAkPQ78U9TAZDcXghGNehgBp8XYpw4dDNB5iEHXkkaj3gCRjnokQWGWabpBqdX07/XMDpl0HA69PxO5l5Ko%2bhlSkTltnHTTSW%2bwoJMCvQiX0ssgJ1L0AtTJGFTZyJPaTM9eB80S0wTz2JsvJ%2beSVn6yWO5rTbpJZd2/9Wg%2bSAWkDO8hB/8xuAH/kf/vCdH/yf/%2bpN2vYf%2b5lPfMeDF/E2/51v%2bEdXn4QX1YvyzZGkG%2bFiO8B8nuPRYYl%2bDuxFwKeBsj/wvK%2baLlCQjAp9wXOsnnttP5N6OQfHHg6u4XL/N372Rx54/esf/egHbuva/%2bIj9Om/eNGA%2b%2bu/6Z%2b94%2bEf%2bPs//4XfX7yOSZhiBu6yHdS4Xw3RfSDF5HIgWi%2b7YM99TVSL68CfPV3COy7gRUB9L0CXE0elodQeQX1XL44QNh3wuxHZ6Y3b/ryCrRmy8oHrh1xIqJzm4p5TxMmEnZKRzuZNo3V3CIbVp7oG3NlZF5MAfStJoDatE0pIvNa8md3n/lNq4EUP7GNIQMt8gBrgrejcmxRwIwCLMYWYTHM89Io7MBpMUNb20DlHnXsXexdzzMk4nk1FinGeSarnFmgXLLFdosg8pDulFmUy1VTtsC3s7gaNO5%2bj7GOIFlfmwc%2b7pUpPKEVhoSButFUUBxCrUzfMOI8hUW5q7KcF5nVNaOXmgmbRrq4ntppLsEWN1oG%2btWNkE7MgnWw6B0u7JmECKhl3nSiAWW0J3AXwOz3DuF1WrLyr17fA3QKHTdVRLfMuoHw5N6pvu/mMz0vcEsz3LsC34F2eJ6MSpuWpbGDVelImDNsyzT3Q/lRkNEbjXiUDCrD3pZojQfyyWBPdJFR7TEu%2bAas9moWIRKBkf2Xufc84Dznt39pFWjkE5TLCuBO0x6rNrhZe8xDYPUJwpDp3C8InMw89b4axkWRwcqelofoxr7rimOkR42mJTqtYAe9uJ3UBPgE8gbZXerjemaJz0ECvVYoLjWzmuZo11U3rctc6k092J8twFFL6owm2tpuITeR2U5wlZCEgdtpajKxbU/hhXyhBtAU7lMFw4/1apQ4XCpK8akqfi1SmkoLZTnYKvbw6WlX9jMegdGQVfC8hF21kRZJgllccSyiZossM3%2bK4jFYqs0r/ZWIqF2cisQoEuAvIM8mplKeQ7R2kyhi7eEt2I9iuayVie157V%2bu5NTaat55Dw5%2bqZGe1cq07Tdjk1FsBd0ZG4tA8aJ/AfSqAkoz7rKRJvsK%2bCDMDfs1Ax0VGrHKFlEmpcYweBuijJ9roftmTiAmTI/24h%2bPBDGe2YhT02CMLbFc3TFK12myxhbR3sLwTBe5MINf%2bw2dVFbPKdDFum5l%2btxzc6EzTDvkuUnQjjXowCuTnx5gXZ8TzXd6BOLGoLk1cYihdaRgXlw1ti2cYTUJ0rEmEeR8EwJ2IVpGakHrM/4bK5CtsZp8sxAO9kw%2brsU6sS7kwpu2z2BLrGGIjZsLC813UuiJ5GSa0h9YLY1KpaOJnQxwuOtirD7WmBPNZ2f7pC09GP23jXKQyGHvPMnYT4FMK43kYGqBub1nQgTP2BbUm8tkYIQtWzSeiZxcbUIJ7A9pdpt0eZ5AUaJ3toDweoe5TDpOj2W1oZdSGJw5k7U6BeUbXPE/kwHt1RiF03uIioT9RiZKQCqzkLQm6Pu46G%2bBlr/Qe%2b5o3vf9vPfWJH13Rtt/3Df/qwe/9wW/8H0ezu89feCvesj%2bEd67j4eF6jnI7KHcW8LJ5jifGpfi2j%2bMQnzvIENU83DNdYMHFCevxMJKwAJ66XkhF8k9nAc5//Ivv7cw/%2bTMf/cD33NjQRG5/9BU8gRcNuD/07f/iwbf%2b0A//6qO/sXjd9MBH87zRuDtnmFzlMq4Uxr2yiBPiNsAZHCEJdvH0AHj65Bi7sy1E53w0UwXu1ByfiannAuoNLfu8UhNi/SEs7cdN2FDHwqqPkeT3gXQWYJBQv1wK8yC6c7NJ%2bGzsodstkElhDeckpywUyJxzx63tHLORhq5226Fca84VMic1x6nGHpHXwkUCAU7SzdCb1DGk4JNAnsmU1zwMD68hImUlOnfaQpoqqtMZ3vTARaRGLjPudHAJM5xsR7hj5uNwb44LCw%2bLvRxtJqlyIURdb2uKZj0Udpqs%2b7UMOEumSuh1E2927lMmUoNkyNBsIRefd75iftUhcGc1U4YWTfEgAe6G9bb3ah1cZLIVJ5gCC%2bOVLqFfR55CNo2bW2SFxxeL3nmOPgJZ8LlAWwZrx0udkwWtKukpL1p2PmPzLu2Ez/25z9xaW9oZ0DkW9zX29BoRYPuwch1zvHVHGQsW7WRgCyyt/O1EJ2xxHOvUYX8/swuh2lITv6kKqn3GlnlX0E3gTrBNLe7m0UKlMC4Tnwp4r1gsz8OAenpKbRY5ukyEJQ8lQN74UtcDjLOlvarVmBO4VxIaY%2bkmky6jS2SjmKjKcIvjIsOkdWF4TadjwR9qkbkRwJPZt1agrD7V3z7C1nBHG6ivenluZM7dCqQ8L8Ev9eKSz0AWcuZhq1lWbDzfqzDd1IvmOfb9ADsN4MSw03yEwshznyo3NMB2XMo%2bZAGrYc84YlV9hwtcx9WG/YbssTjgWOBO4GqAu7jhmG7HhYa9Ll4795EFCPX7FJZSZtY5JVnVrkDcIcz4pUsiXMNUTSWz6GjcBRRSx26Be7WQ0OUhIxHESwRAeo8%2bGgTttp3JfYXomMI7Vp4iJexD63qkx1IZlkon7CgshzHyNf5TxgaTrGqfMYcIp4BzdYdCNJj2Zp1mWKvKLg6eD7gz2FufAFN5F8oeNeImErLutQJ9KZjWQFZ6WpDJyIpYfCk3wnlPil8oQSDdXKxjjSuN5GIpXWu4EJHFiIsMdds1su7K9orLTK3jxkXNfZJZZSVVNUKYGE2dPF8D5leSHh3gTpZ5ktFakuy3VhEepnSwiuSc9Advmig0F9Lsw61GLuy7PMPCRytW44VNm8u42%2b/5/qhtJ3CX9sNnEWZarCgb0ohJJgWbmDoymveR%2bLiPtcCVbAUmlCqZcZjjpUZt9HMpPGYvTIorFequxTvzgaNFV3IMRkEHzWIsuQ/TuVrQiAd7PhIZDBdSNrIZxm3k8%2bTm4LoBFQLypyQY1HbTkioE7DJn0RxDdgrh91KUgxAl7aAHIQq6D7F9eQFmuUpkCN7P1AOQcyFmSDPKarQY5Q4XGlK8CTiZqAc8z8fneaYV4nCcCSnRaYQ48wb/4GP/9tqf/pO/ccdKpdR3ffevn/vS9eG3/OL7vveffqZZXrh2BV4ZFeXX1ODtnAvKrRm8gzpK9p3DKxmFcni0REnb%2bqzu4a5Jht2Gj2MGcqcF9jMPl498DKIAo8fTy5M//Jc/8uk/%2bi9/75Tmcfvjr%2bAJvGjAndfw9h///C9G3pm3zYdbr0v2IeCd2na21dYdGhciizy%2b4qtWUxbwOjVzZRhHwBMnHq4cHWEv3ZIQ6MVzC2FgFyknPF1pNlqaoGP67023T9mGruCVLX/F/gxfOGt81isqUy0bCSr70ww77VASOKl1t1sy8sUtRBj/Uu0bZSKp6J%2b1U5sOLKGxoZY37mzlstiQ35gwvAVP41GIbk8FmsnQhxeoAwUZu/44h5gshB780BPgHrRqGO9fBbNW1RaygSJXW8iHH7gD02AbzZ0xkl4H2aTA7h05sjhBI4hwPvUwarbh1/pol3WA1pDtKQo/Ruxn6FHOYG5HJmD%2br7VcrERFA164NNZmFdWwGeB4qhaOfHdUVnAjg28XSHya3NdrsmiRMopWlyn%2byxzHHK16pVd1WAwev0bvciPbsQy4PRaPYVl9940Q3MekCTg3CkJfWrjxO/7eSnII5K3OnZ/zmukHz5nf1a9TBjMVXby%2bUkYD3DYhkRaHKRSGko40nBgM%2bBa2au1vKfhkE1rJvpvS3rbdEOhbacF6guh6B%2bCdCsiuc1LXbdMkan9n29zESGXs55QmNExSG4H/XlvlVq3Iw40xj%2b%2b8JNNu3cqssoBzvMOtvtkeP2XEgJE4FuaJGRnS47XpmpP5VYVVu7/VSXNS5nH5bJl0KlA592h1L6BzjBgd%2bo7Twspcg3Wdqa6YuRhGjuI%2bG7qqSCIrwftMQTU3YeJNcqm9HgHaHnCuyLEf1ZAdaxEmyl/2w6UFZGVBOdFiZ3rFS13ryphiup44zJhrcc/Hf0v1VXMsBVBK%2b6mdpc3MX7YK7kOQLwm8djPFmUQiw89WnGGWT0SjbDoO8DTU/9rj2IRW%2bY6ESrjsXy6Ys6CU48puAJDboMbd%2bqhT1iHQ1gHsfAE5teysEmeqCnPOkGTHUi0ieR08D51qNppgWZBv7pl6Ym4KHvW/69VbnSeEkMcnAO6xcij/bZYvRnZ5Qp9uo3dnREhxo0pkBLizT5BVMMC9VwOOZ0xKJePeFacVem5jPtDKqNW2nJY5upI9TzK7GHRX3kymGKCodxTeO3bEslCQC6KFqf5GfP2Nrp32rpYUsG2oFeqiQvcm636EtORi2Iwi0ixUOsqdmo1UgPRpwN19llWzMzvzHGIXyb4fqSsPnVrcxFTu2q6JTZZKZCTfg/8uJVGUDLodM%2bQ9mdoRlBxyEzBfLTgLTW41fzOnivdhK1GrFDCsnhUTaEcLsuWMA9hRw1y8%2bDWWCOKWsOs6wShwTmhly36yHWPcn0lOHT8haGc0VlRxEo6gKx6QM7cuK9D0QtTrGfK8QOa3hGWPmEdgklVlLBccotdwNJESWzKXWtBu%2b5ltIZQ87vUC7D7gPfaNb/6Fnzj%2b7H%2b1AqJ/4J/8/ne87h/9ld9oxSgPvwAMswJvrsF71U4gJg/HEcr0MPdovf1ZhBghK/sjzwtqwH2TDDtNXySyx0Mulkp8rh9KMmqRFJeDz/zuT/3x//7OD25qA7c/%2b8qfwIsK3L/ue37j%2b5997uzb7rn/9e9W5itDwGScZyJ0LhoLxWvUchfSgAlovnBthpdf0JkyujzEQTPG4%2bMEe1lPWNEL1LnTxpDJqG0Nn4qGsm0E0RtGDQvc7z%2bY44tndWYSjmCNcZdO7JRHtyFAfi62TUOtnNbqcID1pHgSOx3DdpWbjD3/KoaRznodOc7rmWWbjpSNb3ZzuXcenww7bSz3yJTZzQcG4xKtiyXSQx9%2bTYH74OQKarUYflBD4dMW8gmUTDhNSwzGCd54zx3ovqqLbJgi6XWxd2eK6SDA1vkFklmJ3U4XCPvolDFojZnt5ShTslUaBjtj0gnsRG687WRgzho%2bunmBoOGDOajCGBtcT6adnvO856pqrbkXHosgOKWExvmM/%2bSCTNYHS8llBU4l/82GfYVE9ISZt5MG7R3d81l/AgX4CrjtKF0lpZrzE8NX2nTnmpq6zpPvWIacTjK8XyaCctBlWyCTK2ytub71Y5MBcTuVy7ifxpALi2i8pWV/R9vOP0VOY7a1XNONIwBb0nDBZF9PCmXxUjf%2bTlw7NLlvytWG0ZRb2NYMGQLV5%2bhWa10/KY/B/slnR19j9z6tbKZ6mbYz0Kxhg1XkZBGK44xbpEn6o3ku9p3yGllw0g2hNTBFUjTVs0y601J6s15tdROArxAIy44nRmdvpAFWurLpgQsrLtED2hSq/te23u0acMTCRqyKajYem0mz/J1lQwWQOkmeFTxzxhe7qLDf8W/5jXk24ThDRkrZ0X6E4xwzoZkVfAnPSdBuKqCqk8zGZiSfi7ZXFkNNcZPhooh9S6USy99qG9Yx%2bTQgJww3n4PZpzNXSDhi22eBoHqIFjIM%2bfKGOfJ2gAbbn2HcWbtAxnanvzAnaJMdpb2jZWEgHRLEJ51yRYK65yu8ZHJ/ON7HobGnYaVRL8HxPBIbSG5H8xBnbnKUKeEbjXvYrCNN5jIPdDuxuhKZwjp6nRXf7jRoMgDKuhvO3SSrsigQgT7tH60sbsl6uxCToHorGqGfd9EOfYwX1LePMUrb2kLNzkyuLKI2CNz13fEL04bFXaYQZn2U1EQ6M52O0WgycVWjO2ThuQ3XpDGbW5V%2bamWXMudyIVWjg1uJcdCTxFRpX70uDocFWhhXoJ76c4J7PaPegJAcJr9FusKy%2b1UCnCTU39EJhgmuEtmUzwaYBD2UtGrcgIaimNKXpQ1uEDcxOJ6iTfxhGP6g0cboZIpOKxdpDDey7rNZgKQo0KlFmOeZ2M7aOZN5De16CYpeSRg24xwppZtRE2eanszpjVYubVWJQ9tedSnCU%2b%2b2FJ%2bcsGK4TbhVd2IxxLhnz8PiruBg9sT%2bo7/8gY/953/wYdWZs8DSHS/befgHf/Qd/%2bKxbVwYPMkcsQJfXYP3wI4SDpzjhzHKg6uZl5bAJ4GyUfPQeHbhXej4UiLlIPPhTQpxgSJof/YGUH/8ym89/si1P7n%2b8bfedpC5VQf4Cr97UYH7Q9/%2bvz54rf%2byb3/glX/lZwV87JvVJTvmpRSj5yJNQHMqAArjLuEuas48sRf7xNMlFn3q3gKc310gjjSDWnu8SaRM1yQn6xQPGbWhJqca%2bv3UEBevVWQxgwDdrRwstBSYAlGStJlrSeFkoCCcwNse0xk/Vl6FLAiMXtN%2bcQM57qDP7kALGTDMLvkAa/vxb/L1g6l6vPo1U0GVzjIxgTt7aYQCBO9fQp75OJnej6%2b%2br4%2bZv4Pu3gTJVgfpqMDOxRLdvVSqW253OvCDAWaFJqlyLqfWPbqwEOkM75WTVNRgcZQS05r6VcsgGk5VniTVAL0VwMHEGv6W/uRcZMlgbnSI1UORrHoda%2bmuwv0tQ899rJ0bv7dJouG8gN/0keRa2GkWByJn4RMLYk8TTp2nzmPWaVvIpNdJLoWceC1WC89dl/tEKJNUkmLtZpsYB64wJcvmVcWe6HzDczERygJ3YVIcz/ZNfVGmQOPZfhpTbnW7LnDkc%2bS7H84KkaWYWM/qKaSipBYrcuGS5Xrlfgr95Wm2ivaAri6eSyImazLhq7LWdnznK8DgLFbJyG81ItHJn7ZA4fxHn2y7mKmsIs0cbA8ni1pqUE/JuawWQwb4Lx8KmTAPw61DbJ3soqA3vKOFlcTVtWPaBcEJ%2b4etpGl%2bRBnPYEarOi2OxE3kMY7O1zLoQqIZqQulMNEkl8JL7GME/W6xHt6flcDIQc1Kiaw4WXYek4z6Vsu%2bVQ/ROEPOkr0W9ToIrRr6qDUdpchIJ0vlUZ7bQ3qYCXiPRwtEO4FIh3hNPJforF0S1w6zjGzynk1iHT%2bWHIOkFD18xfTbCqilj5bY%2b9288fr4zVkf2DdhPQJ45kDw3FwACBlDFD7JMYgI5HxkrEJL%2b9l86aIkfZi/iTRC%2bDzlJpZ92/i7cwyjy82tFizrd0CmPa4xQZftUjXuZMutNbB0M/v/HC0awVnQiNGZeRjEpVhCdjt1E6Er1hZMVeuvALt0FPF0Nz7lMf3RlwuVXjjAIFM7RurUKVOzfHkr0GRVTSbja1yLvZmIYVNkMbrUpOxJ2xJHkCPk2JEXI2UKxY5RtegCGjhfJoEAefNr%2bVCA%2bPNE%2bORRCRjVRFVxkcmGUsColamtolyHcyC2U5ImVg5imyzxghtJck0oeJ08NrXyo1SJHr67jkkuHVOvbvT7EvtfI99WVqB2bSVj7TpsIivvYTINBd9YPTsBrbXCFTKF5OMiRNHJEPta%2bbRez%2bGFrP9QVB7teZGrT3vHRPuNr7sko7eYFMz/6RPgZYm%2bPcl1bKO8K5lh1mzi5RciFD089vPvfeRXPvpz6upC0P72v3rvd2V7b/7%2bs9%2bGtww%2bBzQ9z2tkOWj7uLuAR9D%2bzDAXJzr2vUd8lMdjz3t5ssC5to%2btoMQTWQB/nEkl8ctTDzemIY6eyi/nn/zIT73snvbv3C6ytHEofNE%2bfFGB%2b7t%2b6EPnLt638/D/9Ttf%2b97XPBDemxz46FxcYPhsSOmjVkJ0rZiqWTUAnhwCD/RQDwr8%2bbMAjnOUQYDzewvUAxuGNEG7XKvL3aQVX2O/hwMjRalGgrXnZljUyZDoWDscwQJXsLxOrnw54ZJFbrUVwK5sPJ/pWIg0VAAAIABJREFU7OORSmPaWyyqxIQN3Zk6QHudfNhcCUvxne0F8uuBgHdKEs40rZpXz%2bACdyLc4Dk6QUYY7D%2bLMKrBJ4wMInjCukeYznO84d5LSIJttHYSJFst5KMCu3eWSOMErTDCWercd2klRXtHat1zkdosdnK0PDNIGPC%2bG5YYh0qp1ecJEtqUmfVKHM0qVpETbp0ymUCfE%2bUgbpKl%2b%2bjVx1tZL07YYiOZ0Ptd7mbz5gGhaE88KcjETfTqNRb7UI01GVb76qUI1CzHNA7QFOpVvd0bZP2NNscej99Rq8ctmpkKjeYqeBxh7w0ysNp1y0a7IP%2b0S%2bfVrts2Wt2tOBE4E4U6cRj9Otuh8fYdk%2b6gnlkcXjRsTBnMXsvHdBZg1r6B1vTcmvY1wKRxA/HkHOA7ORvmQjfgNAVO5vwVYHa8%2biUSYULQ6zp97s9F99J1Rhect3ouyayJZjORBSVLk8%2bNZt0udBIW%2bVmfSJ0DSh%2b6Cbiz8epkLLIosyi2QF9YdxNVca/NgncXwFJjT3nM%2bWKBfT8STTs3cWERQLysMiwfmLGEwJ7AXawb1cGwAu52uLDAnTZw9jOei79bfzfBOEcqgF2HGgL4tK33yMJMlPWsWB4SvA9T2YeORSO6%2bVjlG4snmeuStm8sJTe6g1jgbpyC5H3a9uA4w4gG3ni2y0VKzoPafjIZmRsBvQXv0ixcT3fDevM4rXqAQZqjy4JQbQ8sD8BojoBE665kAgoCUXmNGxLX3VwcN6Jho1pCAlFG9zy%2b7dxNmotEBo3TCSVBtRaicuJmMmijyNWzXcWDeo7ccSMqC4JG4Lg/w/Z2DeUwRNGmdbLpLGL/aNxkKuRqW6pW7R3OuIjUeUl79jL5FPMxWq0tsYm0AyKLr00mffiNDsB5rq1e8wT24jATjlHgDEa0LEGJTsQMDcu4c34go15iNh0iLTVZlUy7ElOFsO0s0mRuV5h53v16YmrV38xALZVzJRfCk2qqvChh3Q3YFslMVfWUyhI6vRDcK0tOZp77DC0w97s4Fw2xn6p2nZaNturqOGijnY8xDTsoZomcZ5gykbzyrTGXtw5O3FHi9H8ntMekUYYh6%2bZzFiBStzR3COOYxftT8wVPpblcRIQNZBntrBUH0OmN33W6peja2Z7PtH2RaqW5YqGLcY4bM%2bIMYpYAw2kmVpM69vGsvtSK%2bfjjT/3a//ae33zf8Wd/QmQy7/ngx35s0H74%2b%2b/4a3hL//MU23rey/xMJMPnOiED57hWQ3nwbOZxqBvVQ3zqMMcr5wvskWn3PBzmHl2q8eygxPG4FAeZjx1FePVzX3hv5/hPf%2bajH/7h28moL6zp/KX3elGBO6/iwW//Xx68evy9v/ja13TfPjvwca03wf3tCMPnQniRzRt3rlfGiEBFyk8MEd3fxhMnwMmXc0RBgHPnF6iHzJBeDvhkvAk4LYs1pO2j9U/fIF2xbMgKDjB/EEgHAdkTZSXDwMNgqoP0FoE7WWRXmrPpUUtoSgdWWbkzVmBWvxJCbi21n%2bIewyTUSHXsZEt3OiGORhnOtLQiILf%2buETzjhLZvkfnRwRPC%2b2NIIowvM4qqhH8gDZenLlCZNkXMBykePihhxGfGWPeayFNSuyKu4yP3oWFJPddPFtiQZDU0YVC81jdZWIKJI1ekc%2bLoetm3JTpivfAhpLnE/hooxFNq%2bnCJotVyNkiW1N8SCZu45wiIEUShUzFRfMsT2uE3Je61FbsIaRdXyNA4hScaSwKDA2VbD3SeUgy9TYRVd6Ir1r3oUHKlJ5kno94kaHP51cyAqGVWgk15BbYFqjNF1No5ZRc7bqdqGxzCOe5eEzbbRPTTsBgQS/3k%2biEw5xWQMF8xqMJcBdMUEpi6GBhtOtCGer5OEEM5guxCCNT3qtrArINC1nGXVhhU9CJEhraUcpelMwYf3iJDhgPeWUY9Tu%2bM1mQrd%2b4iVYdTTQJ1j5vFmyi9tJu1NYmnIXWXBhkf0p1HeA%2bkUn1ecC/aUcr4W2WG8ccY5/J28sFyyjx0GvrO7Ts3Drzvs6IR%2bMUeddqlPQdUJrCaxWAbcaZiu0m0zVOcRjVsGVcWFZAvtmRz7di5q3MxRybTDvPZCUxFTA3Ej8m1TIRld%2bbOnCyoAgI1OVal4CR/5SnbR4Dv7EJr%2b4C7DSZibRV67nuLJDs51Ze40pk9OWrkwzlTuvAvWoMhhygT7s9ThyFKMcpRqGHjnGUcRNRWTGVGwu7WXkM/16X5ehCYnkmKW5mxiS3CJrIX6y%2b37RpcTuyckFq18MCxwuVANpz9aICk7KFGGvAnRcixZbqld9/Op2h161VuRJ8f4zccEyzwySTcfMpK6Ra%2b0ey7KZi6gp41yRWbzZAyX2n1LZ30Qp8tYEUkKjFl9gOWiETT7W/8d3LSCErOAI/nY/UQrJEJ2QF0i1xjuGx%2bFu7gGTUe1lHTCdhSYw2CZj2SVsAT8nH%2bjtx37vIVeMm0qkCaG6jVCPZTFrldQ3ngbLi1L07ANweZxK0TcGjzTOH3AcLvZnBoRsSVHOBoAsOu8l0QAFAXRNPmHh6c1h%2b5epX/qjwhBBES8i8yALMsnylrodST7pxHmn5nsgXG2GKPGoiz3P1ac8KyeMjxslTXzAI2zTfJN/D%2bYY%2b3etTzQEK/ADRdIiTWgtJP0AUlgLC600PV4LgavjlT33o3/7fn3zPH3z0h2/8/AcfeU39/gfff%2bNevLWzjzLJC7DA0l2NEr3Qw1YrkGs7GOd4NinFQeYoz8rnhp73DciQR8Bx5ksdAvbBL11TB5lHWCzzUyePHH3xQ9/3id/%2bexsrsp7%2bFG9/85d5Ai86cGcV1T9/7I6/c%2bdXf8PPNoYhZoc%2bWncspGIqAbIgIsc9QqQRQYCn96e4dLYpK8j963P0vRjXJ0c439nB%2bWgmFfWkcwnbTktZlgF%2b/mRRkX/YcPkGjbtUSQ0KtHuSJoTpJBDgzq3HZNj0ZnafUho%2buJY5v1RFG/mie%2begxmOGQYmjcS6OMlxJC8tT6D6TkSedS6qsC6vg4yRR3TsHLnZWKsKtVAYREHyZ6MqHFyvrHgV1sWEiaitRg5d9HkeTV%2bONl0Zov7yLbJJJ5bWdiynSBJglAXoX59idRUh3F1JcQ2wUT2ZY7JVolGSKGLvWgV6YgRzYoce6xLM1cYn3wFsh05VlMVLMjJuEvh8BgHbU5yLFsrQm%2bZL7ONh%2bpc2ufG5%2bqzZfupu4R5hEVwukbcKnC9xXCjjRFpmDs/XxX1rMQ8GAnlUAOjQ0SPBOVxzmNfQMoOdeZi1WVTq1bhu8NhtxsPfH32sYU699kxyGTjEV627Lwd%2bk3dYGXDdgZL7wME5ZTXWVjpbT2N5snDTkfZAMo1zI9J8qYuAw7NaSkvvbSq/WgpC/td/bfsTkL3cBwntwFyHSj9IGSm%2byEla2%2bn9xhDFvXvzeneqq/Lhi3V%2bAXMa9bf57PNPKnonXhOeTjTQuKV4To2mBXnMJ4K0rnljCUT5iWHUuaFh4yQ2x2WuyTXuTLpzPgWCb4Nrqsqu/zf3aqqhyHNsWTdKrlcnw2fB/lO8QmFd2tuaVO69ZzkMWjD%2bIhpkCeDqElGTncwRnbnaZ%2bYsCdy52GFHhSCPVTB3ALUA%2bqqpxiFtIl9rvtdDBOpgjCLHAXRPwqPnVG3R16XaxaxVtdh5wLWbdQYS/pQsGi2GR3bbtiWCZgL6KLthkXPMOhIE38h0%2bU0q6eO5tFlpiEiqFiVFTmHaRC7pyCY4vjVgSUkUeI1nY%2bqw6kbH8tO/b6PUpueMhpDpu3QBukcVsa%2bMxEhkF6izC1DcuM%2bZu5ZJK8epuByEmOZNNNdG1qFOzPYDHKKnkEGl1YzFuNcmsdKEZpZnYcvK/3GdCmtejDKNAJwowTPlfmksY2QzPRjxtgTutDkVjnmNEn/eSBZNuAdwtgyZ3uFwc2PYs9oXM9aipfIaM%2bdjvSPGqkWHYua8y6CPDuqtGvWVY%2bE4%2bQBLy/k3SKMfgegvZbKJ%2b65uieLbBVaVOV6YlacpuEWSRr4qDTIB2K0MyDSsLXlpLJylJRy5I9DiUkvIY7M9UsaV5IVW9CdLjdixOMbNFiVYn1byv3EOvEUpxRDrRsaGcj3NcN041Mo6aQpTSvoMAs8Mh8m4TIetEzALQ9v5X/%2bjaL%2b8Ul3/tX/13X/%2bbb/6mnz534Zv/7q9867u3v3l4tcSVQeG9vgW8/FJQdmbwyLRznpw0UT72VOY9BpRbdeDK0PO%2blrV1oxJfzAI8ecg6IMB8UeLJqx4GiS/JqLN/9/53feL3b4P21Zbz0v314gP3H//1c099%2bvOvvfO1//XvThnf9Ask1314VHZ4wDPnRri03wUL6GrCX4CnDhM8cKGFp28kuPtcEyeDBM8OWzhaHKE9PIOz5xOpOtZr%2b%2boI0M3RP6HOQhnqNjXngo5WHxQlwPzmFfvpRlcZmfRFklCCUhd2BpHKjHU07zYCcZmpklbNwlrAvqesvB0HBIQXHtrdAqOh%2bpoesSpQ7mOno244ZMmoW%2bO2mPhi2bTbDST59eo1T63l8hJbbWV5BtNSfd15q3UguMzZxWXd6YcvLq7IihrS%2baN4w733IfH20Nobic69oM79Ui4LEgHuUx/ZmRztrCbFRQbdHO3DANmuRjEkOz9q0FRLJidWnm3FLWR5iTgisLdlP9xnvQxzWCkIvyW4I0iQ0KwD3Nebs5UqWCae31Njnhn7Rru/C8hZCEnkJBv6hlPwU5nyNRBhf0KwnRibz4aV1RgtuxRDsgzz2jkckrz6RpyDKOux8yoHQgeYCwCxpKgjO6kO4BQIs5IsFxzbti1zC/PWrAWQI5Lhs6CMpu0w/9Ser4N8ntO9Hvv2LG9kJU28T5eltCBovatxf0qCXGmLu5Cgj/yK24xFpqaCptg62iIm5uEqUNbqqtx904RbzcFcOLNKq3FsYavwZjMkqKHdKDFm8ROfsSJNrhTIQB09Y8FmJUPQTvAubW9Do%2bI99qe0jQQCI1cx2EnGCk64rEMg44DTBvhPAnIL/O2AS9ae1o7cBJxbAGn253VZm8fUZG9TN0%2bdez8p5bubFg9M8Cd476htLiNdlYOVya/jc7TFfsQG0jwzK7ehnpnPaZQ3pGqlZT282RwTaGKlWynVOsnYRZ19nqeyruaQFgwR43KMoS2tnGxcIDfVmflc%2bbG8Jxms9T8is4uWFpC2CJvt5q5Uxr4LKSOv0n8F72szH5%2bTwdtKXPAcYSzWj3zBjVosoJzwuE6CYw24C9vejJGNp1JwKRsn8JpNlE7pb1JDZJXlViRKpqCOsk85Hv9jNe0G4DMXouuNUYqHu6VU1E2GTjTLZYEew5DIhnFP5W%2bjsDOPQhcJpYNEeVTX233ZggneFdwzAmtfQosyqKkmRnKj1p8SmlFCT/9bA3cmd1bJng6Ilrbo5EgMZkvWvT/Xokc832AeYIv/Fs24kcWtrGQV1MqoYR%2bGvNGVKkkrxPqtIgSW6GgHy/tK8kBtbE1RJeacJYUWuuLGq%2bJYWC3OGE1glDdj8NxHrb5AEbakImq3FqLWzNCsGeMNYhomntbyqpCTvlkW/WJVdeB4oldMvbu%2bFkpmeE6OdSxkRwbQw0c/%2bpF3/vEf/Ic/%2b/Gf%2bBt7WXTxf2q8/u7vHM3g1aKiDMrAe/slqE%2b7iQJcG%2bZ4LinB8ebRgwxh5OG%2bJMPZDhNRPQwXnpgPZIsSX7jq4TjxUY6Ky/jMR3/qP3zkP7vtILPsOC/5v1504M4rJuv%2bscff%2beEHX3v27el8huTQR%2b%2b%2bFJOnIxO3E4EHPlOWeGMtxOX9Ke652MLl6wmiwEM9KqRK4sFTubh7nD8/Q6MWCniUQZmsO0O/XWML6QIzpxfKACXyOR0h2CXW52SRypiEWe10ujXaei5h0IcayiPDzm00DLDFJNYhY1XLMOTRMBdbSWraaSXJ0%2bZ5gFY7Q%2bmXkvxK6U3rTI7pkBId14LBCuL0BsSOLjHAnffA8whw92U2Gx1cRRhG8KXiTwSv%2bBxm6WsxGKZ46L4Jtl61jf1BD/HWAjsXc8wmARbdMV4V1DFsthGGA2RZiZ0yxqgToR5MxPIyZza7AHednNTrmM%2b5RJG30IgS8eoQkLhgxjzBqlKVKZY16sWT1hYLWrGaW23TvHqCPnnmhhHjAicyaDtzfB5XCi3x2SbGIpIuNwZw8ziyn3mRZNAJoFm0Yz1HQRj8RYFpzejh3WOaqZkeugIczWW7g7z7GRcL3OiExLbtglmXbbeMttyvszDgzyWsbz83SKiqpmraOJ8VB28Jcdd99CmNqa0uphgNGTO51T7qNZbJlTfZ%2b2HLtl74BBXW0nPlfo08xY002LZ6K%2bBuV7i0DOPk6wJ813WGyarSBy2jlQbC3o7py8xKnAv/pt8OBEyXGBvgzmctt2sqsBKYUiKmkQ%2btgaj/0sUANd%2bdpqnWehojZ34QjawkRc9BXfpetsCkFcnC1JxWpBAE/9w/7%2boXcj5jQWkTXat%2bPtW2KYy/AWzqz25yeyySNMbQ0XCB1CSg8hgrYNR6gnOcYSl1OtqQALZsPeVnJrpgh835YY7abiTWfo2Si5umapvZ7x0JQJXk4gxblnG3Nzlika26FtnatNG6ke9jLxD7arlf2h3adjbKcrQXNpeJqw8lE9xNWP%2b1wm7u90I%2bUN5Fu1FTkIb7MymVCzxrS2rzK/hfC9zd67bPtVcvMCl0hVP5tdsTGjkL9w0qz3ZPii2doIcePculX3NBxIqnXSFMBGxpABOgVEbsIC3YNA9PHKpMpJOHqLzd7ckdkCz69jOYTI7h17taNdMRz6w8PwTYCgY4SduGcU8F6C/pF7LFyrZ7OMIi3xG71vE0Quj1kVFWQ324iZwXOavcvgB7SGfRVkl3zIVZlxk3Hiv5IZHmlkm9iJTykGXDcsfllQayiVV3dhC2XAojaXiZGn5HgVn1Vx5/NA3RaWp7lndcb6JMJ5jNfNApNykLsXwM6HHay%2bENQ3jdTORRZ2jbugA60xALJqTmHmq1VO0eYxZVKhE16aPvia59m9aXpm9dTwLsxYo3DmYhIl%2brqh/TdEGi7MBOi0SmWfFzvJt5CEMf3XaAT37xy7/2C//wH/zdb/vuv/Pwg29447vPfMel75xeAeZFgXsA73wduPdCwLQI8YkftlAOr2be7y9QLibw6g0PL5ssJJfqoPDw2A21xp3PSjx5rcTRNET0%2bDO/dfbM9T9eHD39K7eLLG0e716qT18S4M6Lve/tn/ulh97%2bqnfvX15geqgZPtJZDZog3gy8AM8cJrjnQhuXb2hhg3svNHDtZIqTooHFvMDoeok7z88RG%2bBuE5tY%2bnd0HKHV1Ux32cw/KvbHkPBs/i8/WOBLZ5nUCYwGITp0m2HYTZJFdciqro8TA5NRjZIiGSuTIQk1HTOQsPOP6Ue/rOIowL1LzbleCFkva1uZjH1hWTqdHMM%2b5TnqwaqbJ2Cfbi2ziWrl%2b9MSe50Qg2RZUr6wWvc4QlCLMLpxFZ5P1p0Tny8OMeNJjofunyL1z2KxF6PeW2DnfI7ZHLhrHuDG7hw7zS6CoC8huSwtUe91UD%2baIdvTxUozjFEWLCiii6RaA5hMSik%2bUqOXuxnhk7SJZi2BX6r9hAvc%2bVPLvluP8vVGbAEWgTWfmC2skvksmKQnyRz6vALuwth6yJhJv8E5xgLyWT1AKHpHD9tlLvpYd7MJqJwZ6BFPFj9e0AlCeCrZlQOqDPTGetBGDuQzp8iUvUyuNyxIs2DW2j1a4sfKe1wG3gJ3FxTzM%2b4rGnTiP4KQTEE7GR9hynhPZkViVd3CUjpyFkY9rLvBae/ErVbL%2b7b3YZ9XVRhqQ0Ifv5s5EQDpS8I4aXJE13HuYY0C%2bsVvSjy1rDpzMAi0WU6cW9u4QEzm5LIYQSgwznyVb1Bn04wxTErRnlvgJdc7BdotF7irDINab7K4NnrBa2S0h%2bCAIF7cjzZtVj/EtfMow0FUE7Y8zTn5Ln8gFW0NiWrI/aroky2YxL2tLSQZeb47Toyis9YhQSQwCtINdc4F7ShH2qshGiwkAVVsHR1mnW2G98K2wfuUVuwgsuwoR0gzdcqnDnLU92rCUM73F6jt1dEophiigXYxQxnHKNiQBJVRs7Ye0jQOL3U7Jpaia2/VTaVU5xlK/oZZVMki0RxOmHdhWHRnEhQC3IUp0WIzbPuyqDWyLT6j9WrJ7pWtA3d7DCuzpCTGXeDZCr/29izLKuMPpRuUuzhzy5L65x5q%2byiFyiRhdMlM8yMyxWTN5X2yFoh9jHOCdUfXbn8nnxtP94XRvq8DdmHbaROZo0mJS8Y4gDO2%2bQXyYYitrb64znBZ796TDOuFJ9VWef3jRSrFmjYBd1kz5hz7ybJHaDdLzKmvD7ZMrM/4vWNHyB0y78NxJBKSTRv7H/3b%2bwstHmS3TdIziaYLC68eu5PKGWYJW2QBYY5j25I9rhPYW70U8Vtfzvs8DxepkjZk1rhMru12UkxYLdaJKuhrYnE4gmkSRhlqoSeLM%2btKJbkoBO1mHGnOfdQ7zC1jBdcYC%2bYpNQLM0wJnd4E81XbGOsJn4wzXkgDnTZFJkcD5hRRb4n2Sx/J8D8djfVuM%2bxPAc7wbz%2bmM46Os5wfve//vvee7v9777XbN%2b7rH/a/9/rOv676F0pzIC7y7iwxftRcibDHfTm0fg37mXZ0Cn/dRnow974HZAikfZOjjZAHQ956gfVr4eOwpj3ViLl8Yf%2bx9T338sU99%2bo9%2b7HaRpVOmjJfq45cMuL/pXf/8HXe8%2bkd%2bt7%2b/wOxYY1bSBcwqnXP5Y2WJB8MIlw8J2j3cc6EpchmyVd7Mw3XUMb5R4N4Lc4yZZS06ZJ18yVyLLKUfofSUFqWDC2UzHPTd1bgAGnbWQShMQSWtMU/Vhvyst7pKVkwCWO6hfSZH0tfBQ9wPjNyFoanJRNnnjUkt1CZ3CmHaQ7/E/ijH2U64Yu3H3x5M6ONuAD9B%2b1glOzZkbwFuQa27JKkadxmWWCfrbuQyXvFZDOcP4uGXTTEP9tA8M8G03cEiKbB7KcdkTE/3Oc4tPEyaHUS1voTvwi4jAU3Usz6KqC5FIBoRE1OpUW4DxQR52UCjTssqWnbOECGWwYrjWD2ySOdmqmMTuyuPy3iVS5PQekZi%2b8kCRxxIU8o9WPzISlaMbrsWeMgTVkEN0LIRC99DOdPJScC5ONE4lgTmPc8F5CobzyJO4tNOz3czaUr1VHrpio1bwOwd9OFXVoDUPkvim5mbqWNX8LzERrZDcZC1UhmXca86splVrN7YzqyVswyfCwdj6tmjQDTufLrHifHsNUxikyN5qRKZjlQzdRZMJuGUP7QFnE6LgnCaZX0rqVTrWHKariPAyZVIWOM5Pj1eF58Fb0meD4H8gsdiwqq%2bR%2b4vOQJkhhaqM6fjBatl8g872cpzW/d3F196Rzst96NJ5TYevhYtr1h3SQY31UcFH4o%2bdwncbde1SaPNaYpZO5KoCQEx1X43bTYj1vMVWDOPhYOOaRcbpTbrBzEFnvgxJ3kBDQSkZvUlORkO%2bOfELhvfjXOz1JvP9zOEO8ZehQsmsuwm0XXESIRJMpUIw0wZeEbNyKa3yhkmqBtigvkAiUQ7m4V2biWUTfayQVeVFIXvu06wvqQg1CnEUS0aB5m9kOH2pcc2D8X8H%2bqrFYCYMSA0acVFIf3KymTcPAsyj/yBrWLM37JPuxIZd2KziX2UykQb1h8uqJWFj4ne8HXymEHUQEwXGaeCq5A6gmoBVkfNkxm24jn66GJr4eO4VqBXDDFED926qZxqwX%2b1ylhKXlZWV/JEnDuQ6VN6ts0AqQRyqzKY1UZG2ROfJo/EKq%2bU5dhNLt9cByMe6tZeNTGMKOOI6PJD5t1X62DQmjcXTT1vnL/QBYOHJgH7xNhD2mJUG7qOLm5Wo27y/rnIqeUYLHQM26JNpN8TbTr/ljQOM710A1pUqr0jWXg7dnC/bphjRKtCYcsDdJuZgG87x3PxxERaIUUIdM1TVTksv2MxKLUqmyQsyMResnwXIhVraNxO5pt5gJmXy/gn5IjZeI%2bdeYiss0CcB8K0I2pJNdTtZoDZrECtXaAdqfw3KwL08gGOvJ6Acb7ui80cZN4DI8u1xxdsIMSnOaFfYjgtkU5D1DiH1oaP/eB3fddPtF//3u/40R%2b77%2bGdh1pvuXoIzw%2bL8tu68M61AoRtDfSMmyhZFZVpfZ/xUY5H8IK6h/uk6iBwMPUlMrx/UuDq9QwnixDPtms4/2dffG/n%2bE9uO8hsauP/CT57yYA7r/3c1%2b3/4Stf3n07O9z8ELhydoK7D1tCvfh%2bgGf2E9x7oYXLh1Pcf7GJp6%2br6PPu8w1cP55i6Ddw/Ys52ncE6GQTNGwSj%2bn8IjvZKsQXncEjAvdGN8c9B3Nc3qtjPAjR7mxY%2ba/TD0ZfvA7cpWtSl86E0kEgmlues9ktMRbWvBArQindbl8WyymPc1n5isWjJBCZTs3zmtFRgA919N0CySRCf5xhp2Mt/xSgWcDOiVqKtfE8TFJtK6oPmFh046pkljNex/sv08%2bgP301Hr57guYD25g1WkhnqnOfjQL0zi6ktPNOr41szomsj14Wo9/OJOGUIxKTYhphbAg2gncOrC2xruIgQ/lPsz7DdKGexI1oXmntNrXZyk3FzgwGtNvqoZYxyckitANTYEUZEKu35nFZAMJnXI%2bMsGFxOWGXswJ9L5Iy2SxqwWui1EbmSbuW4OBY82VhUHFiJiGV70RqO9EZhI40xklm3aJSkpDXte9m8nYnRAtkee3VvVlHGWd23OQqQ%2bBrGXn7/u2x2cbItgtRZkCFBe7yt3MRBPou6y6MPpMuLQ4ziw15f6Yg1QsZDKQ3SVRmKT2Siri%2bHodggP8mAJV%2bb7qf6u8L9GIWgtG2zQmqI9pmAuQlC89nRmmxsaCW753XqFCB%2bndjN0gHk8lCrdHczUYJLM6mX7gUtFSFmz7RAb30AAAgAElEQVQv0xhEnmPtYWkb6fTn1aPSU11ZcInsjFj0yDwMN9S31hEsSLLgw7Lq8jhNERqJ6JkEWQEedsEhjKAesMo/MGMYT5nlvvqxV6JA3Xd%2bkCHaq6FVzDDxYo0yGBDQYk0EzKSPj4sY7bhUkGwurJkbxn3tPoS9Dk2U06W5nTHV/dgWXbJkirgHca1JUsNUB7YYuMkE0pZGlRhpc2Vi9ph2NGdQjBWXeblsd7wutnkLqKybjI1G2EWRKWS6aZiqPnMXgRwLybjLWFSvSyl7bnGZIIjry4WNgD0d3rNkiq1eLHIJHiufzdBlaGY6wIBAnuzuSvDChcw8ugX0hpGvKqva/arWe8v7WP%2bSCai0inT7OY8oZFS1GtRfyT6msQ4XqZAHrVqBMRloPm%2bxicwlQZPvYJgXOMeiYpNQPl%2b5PTNmVG/nZn5Hzmndy8J6E6lNJuWVmP3dMYDH7wYFRrkhztybJeGRBCJxGTNx1ETUpbuLH70ugrj4t5vNY%2bPIZJNvzfSveEVsUc3%2bZSARCNsf0zzEosgkZ4HNwAJ2W1xJ9g2byLNcCittN0PUWzlmaSnjoSahBjKHknGXjU5mHnBtGuKCWUzYBQy5mpMswHBG561CpLyUz3R7XGB7B7/4kaNP7vknV772B1757vlEI3Dnmx6%2b5gLK3YzZhZqIOo1RfvapzBs1Q/SLrDwZwgtrHh6YZcgNaGcuCa/z44/n6M9r8sPWlau/9f%2b%2b757v%2bAs1vts7v6hP4IXM1X/pE97zjf/%2bH0/T%2b77lla/YfvvihFZ7tIgDPlmkeFMY4fEyx4P1mjjKSJ4%2bWyoHEDoiEIsuPHzqJMHFrTOopxM0aiacZz1sRXfmiXc6gTUBNtfHlMJw63YyjPqBMOyuvnk8DGQCVM91TXCh57MCAi0M0eqoywurpcqxtjPRtgubxIHOgPf2Vobx0Kz6DSDwAw%2b0x%2bNmveBlYFp7ktSUMtF2moTiIGOTxlju2HZSOu70k6xiFYrYR/CMmqePblxBUKsZ4M6r50KBGeoFRicLvOWNO/BfEaIgGJ0Ae5eALJ4gDiKcY7XMbhOLhYd62Ee925OQXa0%2bQZK00BV/Yf6fNpGiUNC%2bXliJiVXdiE4EPhaii9fhlb%2byAy3v27JhwigbAMn9yKS5VT2FeTOJnDJZOpIUljrnLM1jL4woUUB6atoOk8fqvobVPWrIfdCmkQ9zSHbR%2bqRDC30RxE8jTX5cz33Y1OjrqdpPWvAr128kElY2U0kmzOLE9TN37SAJ2sepWiiKS4%2bRA9i1na2WKhVLzcVZ4G6ZF024W5ZWqa7ZgBiR2cgksEwUlnfpJAvbfuHapJ3W4d2CWcy7bp3y0KznvY2quNdfHduMPKN5gW7sYzQvjb2ZAuiqONOGSV6AgmXgzQFpQeh7Or7YrZLLGPbZtksFsMbu0EZPLMtvdO8rNpPuA7ENm0nyTGilnt18z3dG/fi6VzwXMW51x3VGXr4XD/cAzXKG/WmkEiOTMFtJXrhwY6JrAMSMOnGRK807wF5jhkkZI92fo35Wr0hGNPES17LobW%2bGG9NYrnt6uEB9V21Dm5mCdI/5SFBaVuUD7PfUt3Blx74daFJzV0NkN4Gz9YZTAFHMYm56DaM6QQ0wNs5Ttm2yW9PDPRvmaLeBuRjgm0HErrLNsWnRyq9EzmYZbJts7Via8r1QlkK5Qo%2b5Myws57jhbGrj63wO9yGoogXktGyobAeUEHoI6graybSHTS3OxH8zMZW6YzsOjOba0JljwwRPyhxKkb5QDuMCdtMhTLVUvT47Y7hAXZ1hVGazPqOc1nP1c7uoWd9L2kAUaMEmk%2bDq7iOSGo6haYYubTu5RDR5ZiuLgEIZa7rD3LQVdNtpIedEdGrnso9EB35X3y/zgNWlC65Vdp8bGXVX%2b877bDGx2sxdEyeR1h1/7FVqQq0C9iWro1HBZKaJGFVRpczURTYBXX4%2bMpEkRjRqPgF4IXNpvZ7BC5vGVa6QBelOJ5D5OW4VaNcCpCT2igDdbICo1aocla7NQtzRSHF1GoqjjN0YND5KA0ymGeKah5Gpvk4v93o2xnwe4pPP%2bk9e/NbG/RlrZERFGZWBR9B%2bJtJE1PkIWAwzPDoDvgCUyRgeo1us0H7vNEMZqd0kg6WMjj55ADz1nI8oKS839q9%2bzu//3g/%2bwW2v9lt3tpf425cUuL/%2bm/7ZO77%2bx/7%2bjz/6/yz%2bWtr38USR4qukB3Cy8/E4K74dLRAEHqYXmmhdV6qL/UeKFyxCfPpkhNZoG%2bcvJqjbJCbLWnP13C0q8F0x32KzVYpufHQSCKhsd5aNn5rOCZNJPIWlAvyHZNT1aTc7hQBgWjzaQkrVe5Bz8riRWDvabTL05TijvjIAYRTgcLjAjpnkxHWE7M1WIRp33qX8mzKasBQLSj4HDohbDU1KW0lQ5Ym4qAg9BM8o5ekHEUb79HSnzt0iFl8GiP4gw5suLRC8%2bS4U81wsIffuKrGIEwHuZwncO02pmErg7ndoKdmQQaZeTxD59CNehk9l0jIVIN0ELgL3Rm0uA8503kSjnsjQP13EaNVnpvKngtOKdXQb9RowIwEr758Fk4wmnbtwLqCluWWHiZeFUXarXZrj8rlZj/K2WD3SWoviAN34zsnm8TwcsNawwU1dzjLfBMIuMKxkQBJ2VTAYUypimFeex12UyORJJtotWFSjA4jj828u0gX5zE%2bQoIoJGbOhUmKiRZlOmb4dYFVp5O3NO1IGBheYwPtCNvsOybZTUmMTgN3JkBFWcWoyCzfR%2bZ8C8OVjx3bR1b8L62614rbktxUKUEpnTsp3V73XDRVXXZZOupBJWuVpCUyr6ItM0iYxlgdfGxlX/iSjZxI8%2bV8L1AnAXXcai0/Y962HOq/BdUnh5yzWxP8ujpgkWsN4mstx5oeZgGt%2bL8C/YKSS1xaI5IUsuSzKMMfxgY/6HnuFNr75QSp/i1%2b3eNvHyA4WOLNHAVwsIP5o30e4WzPAXQH7ZK72mSWBqUmilHc0TVC02ihHUzS6dKQS7QRqMTA17jjyPtfeNfsIxwtxj%2bFiwEjmwaJSXP1xawVSph3DHFnbRywSOA/RIq8kc7aNSV4KZXEOcOd3toCY5KKs6f4FYBvf9k1a6mpMcCQyNlmS107GfYqmRhdN7g/tHxlNzUTrViJsxMiSRNtT3BAHm1L82LXqKS0alxm7bus1Z18rvsTl%2bOq4tAbe/4KgfdOixO3z4tYmvu7LnCp%2bL1OtsQi2x2B7PtcqMEj0ZTcbBcamCNH4%2bRj3W4F254Ik4jQN0DHsvYzpM28F87ukgzuNCPkjUSwfrebq4KZgnFXaTVs1CxBGq60jjl0kcPqZFLpYkX6bmaJKqsYU%2bdE23aGYU2Jci2q%2bJ0WTGga0z7Mcu6zkXWrUJl14iDvq1JPmpSwMz9ZLPJOEON9YJnVvCkpw7jmaBzSWMwWXPIzHtNkGOI4ngwLJXo6JHyLthGhGRVkXTXuOl%2b8Eomlnkxy3UB5fzbyn/BBPHGaywC1DD/dyUK8BN%2bY%2bgkGKaTPE4bDEl68Cg4Pw8n1n%2bl8o97/0h//HP32zVGG9vf3/9wReUuDOSqqjxht%2b8rOPXnrnK87W7/WKAo8XKV4bengss44yCchQV/M3e6hoQxRUPTVsILmW464LU4S1UP3QzWAiQCL3KjacDftwmIt8ZasToGBFNg4sxg3GMjwyVHKlPAzQ2VK9GwsoiUGLbIbFLCjX0OGqsnmrWP4CCV1iTEEK6t5ZqdUmvdLPdT7Sx5vlHlpk9wc60PV6mqAqs6742POWfRwnWj6ajDsv6iQpJZOcmwWPlc6d7jIh3WWeQ1h5unPPQCQz40mBN909RXTvNubNBtJ5gZ071F2me3aB3dQT4E4XmVqN3rcR2kEJr2hIQmatxoUSJycF7wrcfYwmhQnL22dlWLjaDEHZwMI4yygoY6U/tSOMo6V7DL8iw2zdZNzmbwGrC9zd75kEauXrru7aMsZk5JhoSscPnr9TFvCoV5/mGBmIZ3XkKvO5ufOtD5pynWtuKFar6bLZNneRchdem5CzG0ArPxpSNtJgzQD1ZJdrCZd%2b6y5wl%2bRSA9ypZRfduNluhbnXJUqnMaQWpz4vg%2bo8KgviLXhnYu/Kc/MZytYy3zJJblhg2GqrdgHCw1MKJEMAicWlSVHlBMJ9hI3Xpr6yVQus5/V/V%2bQ/oUjaSNOtLeLGaqw2YY368OZSQ079uDjSmFLs0q5tRVXei3GsoXZW9OSUrPgxJkykbenTnh3mqO9ocrmClUKOqZveINnxnZ0Cg0KtLDv%2bHEdHPs7sFBjTJ5bcJCs12xcoL9RDo5hhbBj0tjfH2IvVo0SAmI4x7TLBsGiiVTcwkckJJLxp/8J9JzPkDdXvNKk7HuRodTnGKKCzvu42QsjE4tWGYFxvyL7X2capuiYxQptDRrAYQTO2IQTuLQUmEkmb5%2biXAbagxdHsRsy%2b7v4ikhg%2bc2M/K9aPbnt9HuC%2bMgYVwE6dCYE%2btmrLgktVlMEws5R6KWBX1p2bRMFmPk5C5qaYQZD/ESbdsuyWNTdOMha084IXA3hxT8YF6/8t7WCNZd8ExK0d%2bXriN/e11pO3IikM33DzgOh8wvfOvt8MfXElo%2bxEALQ0pxIjAnhHKrN%2bnesL6U0nE5AukiRWZl3qyZMZteplVfxJjrU%2bvlrHuTiXZFr6ynNbXaB74gRTXVtujCRMLgKPSxlNTdaWTBnVCLithGrHNH7WnYfo1xT8CmD31CGm1a2J3SPfyTZtGyn/ks9LzBeFWE3PU2AvVvBur9GtYWDHM/5XQPtMr0kMK4x/bhgBW9MZnjuKMdnLMPEiZHusllvinl6Ie8scd7e4uNIHtR8paGfqzmd9lMMhvJK2j9MMfgQcLnwM5znOJAs8U9Rx49jDydhH48ujR7rNxz908szTv/IHH/6e25VRb9lLXvovX1Lgzst//Te95x0n6dv%2b1v2vet27p8dAWBT4YpHjdWGAL5aUo2i2tPYsD2xEjQOdmdlIn%2brHmB2maN9ZQ2uhchnZLOvuPKMlg6dJoQXrgJg5gYy61q72hYmvNg4SlLpExuWFBaAGOc52AwHcdl/uY8F7p6NM%2bckkwx73y8jSa0KJjUfynpKhOsR0ugUGlOxYaY4dMQgsewTT9GampzsXJkpvELSbuioC2gQEcsKyCapi8abJqcK6h2Td1XrEKx5Bkr4e48ECb3nDGXj303GmwGIC7NyprHszinBBWPeWFJmKwz6SWogOq7gVBbLMQ1ifouEzJMznxhDgBI24tVKNgk4yQdFGjcCdTkCOJaQdV92Ar0xup7Rr63jCV%2bsWBTqtG7jkjTBtpsS8VGo1c6Y4ykCrmlrpSJcOM8Yj3lZhdN1gpPyAsWWURZ1jrWjBgC00te7esu5HvunaLXDvxowGVQXSb4plWxbRSotEg%2b1MQrcaHtyEWHdCXgfncn%2bWpWQ4f8NBLWaylWPtLkyYtOw7P7M5EvLomTxbaq4GF8T0li8N6yTSDbN4of9wp0Y4ukzurJh3W/ywAkrLBayQwFP9WxZtBhHYyS6hA82adKZqFLOZ7i5gy82k1GiIMO/8/ibaazlcEkDIX%2bYj/obtkc9EZBFkff0UUy8W4E2QfT2Jcb7JZNAYLcywn9TRaRay0G6BPumR9PE53V7ORpjup9jZKzCkf7ow55SyxJD0PQcBkXGnPz3hBY87oSuMn2BUUiNkgDolGh7QO/Ex2MrRzlm%2bOJbFBSWK6s/uoZDQkWlkFISXtIfVhHEJGjoNpHIoWquwyucgmmGHsVW/djrZql81v%2bNifkanEFaQZpS0FUgbkjwWJurWA2HfbQ6AbXe8hHXZB49twVmla3fasi34VElwzHeVW4yQNCUa9SaS%2bVQWNryHXk3rdciUI3aAsVaTthIZHkCqB3tIkwRe3ESrGCAnSHceFosfabaT3dYZdPu0Tuvhy/03AXErd2GzGOdMS13dXui44f7KgkgbibbMO58/fd857zVMlWAen7ryVpOT7rKfDJkg6gB50cRzwdhYK55oh2y6gIkFIx1d%2bMyWqaHtRiYF1k4jRPi52C/Hmdg4Uj4zzjO0/VClX40MBP%2bS%2bM0CSQsm2qr8lq%2bKixAb6aaefVZmwiFS3mS7GwH0yEZeKfFiu2bBLk8XpPJMamnl007QzvlVwXwphep6DR9ppoB9J9bijLZbSYEreRbqQkf5H5n/wzkj48DxVPODdlrULDDfyUN4MMYngwjje5q4fFDgLLFME%2bU3RfC2LoTl%2bQW8hMWVYpSfeyrzxs0QoyIr94cso%2bPhawpq2n0MAHzpKJfQ9uVRhHxS4IQFlubl5cG/%2bfkfue/B1zz60Q/89dug/VYT73%2bi715y4P6uH//1c1/%2b3ONnr6d/79fvPxvdSyOIGgp8qTRhJ88XoD49G6NxqHqDkkDV88DV5EkR4/rlFIXn485zc8RrcpmVgYaZ3N0cg5NQpC7CtHNcpWaW7DedB9iBaOnoTED0XK%2bAu3NAAe7C1nsKws1oKCz/Fr3alTWXYidiTxkacK4RAxPV1iOKa4Qn8hoy772tDMN%2biG6vwLUbgsFlotimdzOB%2bzjHDpPeqGClzn2SqftK5edOSoonCTG6/hzCmq2kqiKFrPAwH30Kr7v7ASxedgm1doZ0WmDnrhxTnv/8Qiwi7yhKzJioSrCyNZbCPp1aQwagqDZFLbQhczLrYzRiuswovUo7O%2bqTbSiarGEcOTTp2jRFTTfvh9q%2bdd/cCmg6ix8ymeuaevd9S0hzYfZxqKTKKs4A3ZOpgpZtJubxRwWQEo1SFmRsFQnc%2beSoVafrhgWzMoSa39jqpS6QF8bRcWtYqYa61ok3BbuVvYKwL%2bvyDP6ckwLLrFC7//%2bx9%2bZBl6V3edhzlrucc7dv6b1nerpH0ggLBkkGCYMSgUSwyjhAxSkvmDIQmQT/EZPknwiTSpz8A7jKcYxTKUcxjlFCAKcoOyi2EuGSJsQYs5SQkABpRqPpnunp/Vvvvpwl9fyWc893%2b%2bsZmapIGqqPStPd9557lve8532f9/k9v%2bdX2QzWjusTsltAuizFLSgdmLh7jdtNinyDRcKmZhto7cf23E3W8pm6xGkdkdLFl4BJUzxYjaDqyihrWmb0DS6xqtkrUlpxJmH1VwPHAa3UNAfF9f4Omlns46FIh7vYsG8YM11VXtX57iHpDD%2bm%2b8nUmfj1i3ziCWmIXJ83nWf4d26cnFlwhsCZHudSmTVKxbFjPA1wocvlakNAMH9Hqz0pAUMQvq9acjmOOLi0sXiwFBtGRbdFlf/hz04qKNvk7ZGdNF/IZ5OIrLuym8LQixumusHw2oRLDwLM7RwJATpRs4RtbCAi9V3XV5vWpWC5UG6ympsi578JaBmBnE3R6TXVC92kMdTlu0xGfmcSsMlwhW6/gVVZ4mwA3PV8uwLY6akGmIWWxMbIzidymlj7eysKxDGGVq5ckFN%2bxhoDPmSz2aghZ3KqgDVD8hwrZPiwHash3v3DCbC8Oqo9efd0Z7El3ikjrATug5iROl2RPBiusCN%2b4pTd1QpCyEPSbOx8NkOUpCJ/UD17gSSOMROrRta8MK39xpiw%2bU%2bxK6Xe/BTwXd%2b3DsTl9v13q3WS9x8FrPs5fCHAf0%2bIOiUvJkZJrZ/1HhJjaZJjNG1ajDqUf/MhOPimhIZylbrNKQG5iEEtRMnvuZ9vCkr0%2b16SrZNCrY/xj4fW1FKQKUcaMqHhEEnS08RZepCeLIKsbl15gbOdQJKNCdc7CVeTazjExcVipYuMea4ySy8Ux/wJT4Qni87IiridZQrQSb6l3ZbUYVitCqyEAMywXIbyGeWTXOCTbefvV5zULbdrO5kjutBBcX8iVtOHs6ZozQnchWQKIgyyMVqdNoarGNk4w2GZ4w8vpmjNCowXJd5yJsbTZYarrMDe0oUO3WMI2j9f07SvYgXt8zDEYa7v0/29DK%2bMI6ympUih8llxY/R//u3/6Pd/6794bPn4Ou/uV/Lr/9%2bBO2%2bGkpnf/cLOD7/p677jp/PjCHdyurHoC9XeV9BOeYvLK8JqiU%2btOHD/ToDje/RzZyGmUF6OavSotZZLZxSwBwKQheUeBpXOtl511YE95QwE5gzP8xjcRxJRTZPsFNQJ9xhefD08XXepsFatH0eOxcWEFGfSKq0OSsT%2b0cYtvvxb3doAIqWSVTLjg0WRmLsM8QBZ9yjC8f1biKU8NQXGlqS6grDu3/pNZ9HaHmM26GN5XGDrconB2RVY4XqSlXiK%2bvRuF0FvjGLFkHgi3ylwp7uMNnies6S1Tode8Eaq1wpjEaDdnD%2bisqo%2b29kqQRGMEZYs5DQzozJ9gFrIpZKHy8hMrLFZuZPhc1pFrplVlVSxfXgdtOWqa6/zuRVpEncHFg3R8wW5JrLWF3CSTGm2htXEUJshnAFfMM648TnBNVn8SgfvulBbPDC0eUz/XhZLMpDMPwbIcSi2bbrVwb20iwF71%2bxThuPn575eKdWvjeevF5054WvORQ4LZtlChEWruFF15QtcVvMkuCewd2BO3TqZULGKtE0A%2b4puFOvPKJfxf3ONxsWILCiI4u3GpCdZUi0nL4Iy3k/lqb4Zyxfd%2bsMAXsPpQGpYk/IZKjoIJN2zXoD4KkanSRZQn5kz8X7VJ5JZpWPo/wlOPaKjbJ3/QmGzVGYNmBiu3C/ZPWrRe0kgCaZDpBiEU9yZpbiYzrG/F2KZNtFLjEFmG2CGsVcorWns1y1q7xaBgDwkoghlxMUBy2Qw1LBzo61jt2BGWls8ncni540ESWOJ2VCT32WVWbJmxPosPBgBaxqvxIfdQwlp09xjjD1nn%2bDz6phn/4jsOOU%2bFrGhxP5eEWA2zJD2YmwHJUYNoLfSd9PfNQHaBO01vQv7BftKI1C71yUTyy0XhVi5DtxrV67JtRZhI8jnobtN1R33DcgLKcC1ixU8ZT/xRMQ64873sk%2bAXpQIaHljaDP3BBZ2Q0liAfiZFFySiG6AjAc3bbuMh0ZXO%2bCTbl8tKDbfcr0jiTRy9caif6anXt/r6b/h91wgjLlKrlWSrrPyfozXksnU21TuzxJWGSXT14KL7eyE33vFDlvl1PG0ocDdFpYE7106u1D3XtOaC2MeFJJs6sMof0WNOWVl1RYUmM1iqUI%2bygr0zPmGAH1APX7lkaquOJIwW0ZI2%2bvaLvI681y8Fk9mnTP6FyIxGQ33YfEizp2zQll4mYGZk23PYcR5wSN7JIEWEY5jXZCwFto8LyQW1ibb3tCqqDSmmC8VtFPTTkOFVR5KYSX2NeIYsYFM5uIMxfoHJNGCezMEcY7jWaKFl0iwzFVOXIQRLrdLjI4mODzq4t6VHHdbDZSzEoNuWbYRB%2b9JMlzdisV/fUW52arEdRZaasf4wl4mZBiVDU9MMuymAR6sAokizFYlPn8HAtp5bU9ean7mcx/5xf/uTVe7H//Fn3nMtG%2b%2bI1/Nf39FgDtv8Ju%2b779/dvvK9/7U73/2zNvOXcM1fjYbxngiCnEzL3A5CHFXbJeUMju8t7wu7Pvy6EazO7h6cLd5rXW2RHc1Q9dY3s24foXnqSnvF5iMLMR1yvJcbR2Z2NpAb2elchlHT7VJTRcDllQ6DNVjPgiwN8qwS1tG2/aPc%2bwOFD1WAVGP5woJoTo5SYQ9on3TOtytAxmwPyqx07VqiXZcghCWOOd5K%2bDurDvnEDLHQYiw0cDoLhNV6euuP%2bYiYDTO8S1PzzArL6L59hYW4wI7F0rk6VyYb1Zvu5irZKbkBDyYII0SYd6bzZnp3Nf2Xp5jILZaCZl9evBTPsP9Cdx55pOVPL2NJEQJsmgJ0uYauFdJnt7uBtr5O2GINxws2A61ubQq3MT2lWP5YxEfdGCHumOCsXEpg%2bAQnDD0oALKfMFgTjCul%2be8LEz462wnEknN99tdYcymXCoRDpbURilgYR/ZlBBVEhpzmjl1MqV%2bvpYkK6yatL3uTeAun7FcfE2/7wCC4EaqTnKx6gWkIv2MSaq3jguc7YZS6EOOZ5Vj2bberqfJaXh87usbFwd8TgwNn7BAhDLs1PWzOiuLljDawf2YnE2Ls37t/n0xHwQhJlbG1iVDfq7TQLxHu2qKkhNMvP%2b2YuFrjS2/MQAvH9ekOtU57cBVsSYLqdefmWYu6MrNPdNHRUsANZEkE0y5CwGLtLUlx8q7i1CA/TBP7XvVyctOaYqQ5T5tAeZaDgJ3vl%2b0veQLwgJOsvjqRpjlsRWWoiSG8pyTvYuLctq9VlISQ3kSTTNQyX5Ow5r7toA7y8VDC6Cunbvv2uKZl0lQn7J/5Ws3mcxsd2VnAvda2I3n6OYUoQQIHKXzdu06mfZzWr/bBO4CSjYYd09M5R1zgcevhWn36J4zyEwubpDyp4OMDQ4ynKlcQwl2XUQSuIubDGsUTGaIOqkYIvQaAfaP5tjaoj2tug7JQssSlI9mkVRVLZoPu8Lo4qZE2ogxkSRRl2j80Zxk6pM7Ne5bj5DCbY4zVWTDyAe3imRNiXqhpqqCuejJaQOZgeCdcpmpFS6iJMYtNLX5dJHLLQ4CjMsVenFsoJtzCqsgR%2bimOaYzVgLlIkZlrALuDbyTcPJhXvpOHKoUi8QSGX9LluV5mIzqY7qc2SwhfSEjAaZ5AOag8rh10sbPIXPqxOS20m9CoKORQs6zrTJAq98SxxjaQJPs4hxKom6xCtFphthuFEKI8DoJ2Pn3QWuJZqNEi1bHJOnGHJsLHM/biMJcxuk9VkSVaT7CmXyIZbOPF2cLzCYlDp9K8dK9Am%2b/iPJNOYKLaYDzXdaNAShtvDPO8PJUQfswz8qDIQJ3j8kbQHZYgHaQrGp9MC5xZy/A/jjEN3Szj7/4uZeeDw9%2b4ycfO8i8DgD4Knz9FQPuvLf3ffD//sE/fP6bfjhqJlfP/glcK8c%2bO665gAc3cT1bTG9w/z/1vmz6hd/cuzddnb/WjgfvO0aAftDbVEYAACAASURBVD5Bhy4h/hMbZerqwRP%2b7sKInWQyNdqnQ7Gy6KpFJwC4P8qkMIhobu3YLoURwN0oxaedWwXcC%2bB%2bs41zy3nF2A8PrW47dXBbqpOUlb1XTWWyiYN9e/A%2bOXirEKwcsTqoHUp2s1Gl0roTnDWcdb8jbjbuMMMJbLHIEfcu421nJ8DXt7AaFdi6mGM%2bDfFEEeLg7By7va4kqUrNlcEIadTRwkzNmSTcdBqN9aRJIECbuqlKhEsOQJjofJ/3xFVmMk/RqQHzer/WDlfTdQvYDkCrR2GsbaJzJrTS0Xp0320Wnf3wBDmbsNnOrskmQ8x5dqvNRDgOYiUmYYSm%2b/rabx24O8vPyZ%2bHF2nKplj0lJeUALlKRq3JaupWjtIHw0CriUpSbCASmEP6EFeOMWQ%2baBMWrDGNdxyZ9dSr%2biHG36pLspN5wi8XDmwHB9O%2bONwb50gaZHlOAndeFRdWB3Ngm4lW9kJx4qiYdHslBAw2gfGGyw6BP88jNa04cXBBSFZ%2bQ5khxTgtMVhsXxk5mAPzTC1ZuTB3TOfAnbc/XtI%2bkzxsgCk7aG2rwLvkfugXm17wvju/Hi60oJMw16cks9aTxPTZPfzgPepTfTNbIUgaWoXVPuQ7opVMaZVnn/ozJQiXhtAG0iRXPZEDff9eeg0bzpIgK5rbEKj%2bikVjCnQIHATkGxVuWq5wzkhAWwqKeRSNv1Lwq/LBTXDM7wjIHbxz/70MOGORFj6fA3sUcZvWkqe8IHzP0hidkkV6tG04LOfeHjY20iagx2hsnV4XkMyomeaDVILzmkTGx362AcfqPtUStcuo9O1sQkZFtKmwTIDmBFik2gZFGWHQyKQCKNsiZLtxkT1foJG2sTK7R6VhyLLPEbH9hb4vQGV5rzCv9lauPvy8ft6fJWdrwqkaocuY6QsCu966RGVak708HIvT3345SafVGtTGptMWQPWnlkaxaMNld%2bsTBOxk3AmQebdkvS90QhxPLaR4Qul3ktuvvzoK5BvCft%2bbUD6kRbjISEsOTL7eW%2bqkBCFmK9ZF0WeaRipt4UvOxQ1/x2JRRVmgE8ZW4VULLfpVuIOMBRY1J61dYmZ6ewme81wsMFVYfoAFuELXn7Ojj8na6bnRyZDnWtm3yHPEZYh2pyWOcFlWiBSGlcnFQaYZY5EF2G7kWiGVLHs6xyoLMahZ1bICM3PLjmdtSTanfTbnfgJ3qmL59ySMMHo1x29vA63zDUQL5gSUuLId471Pokymavm430DJ6OfhHXWPIdMuxAstH6cZikaAvWWAoxkLnQVYzko8f4s21mKlc%2bPy%2bLf%2b/vN/8Hv/1%2bc%2b9tc/d8ob/fijr3ILfEWBO%2b/1vT/w888O7969sLf4hj8ZR7vP8LMsf/ACX4YnL4/uzPZu3blyrfNZdDr46M9o9vLV7/jVD%2bXxe350lrWucbjr5dMqS9oZburO6dwiwDhQXaYUTjKg7O3soJ4DsxQuIBBnGJkvqlHaZFvqoFwmrUJZF67cNVnUBob6KGiDszA%2bAXXwmSSx6iyi0hr5Pf9ZG832RznOiJ5dB/qDqVeZXXtEPwQSwkAmvvgGLWBiHN97FWeefBrDe7dFOiNnpF5hVWJC9PTOK/j63RBRd4n%2buRLLVYHFNMLupYWUMj7T64pMpuyP0I46wiJQKtOK2sjzkwU1HEyL1pRh50ITfJR5ngujTuCuI6cOl5NlolIaAxj8rCGaXNZ0mAuzLkD3FIDk4EKYEvOBr/Zz/appBDnXcuBi%2bJ5/JzYgCd6hlz094Oc5js3BgzXqpJCT4YEGV4NMMGwGCtqtqutrvqNeCXDjmW7%2bhow2GRi6pnAjcCf7z40sOS/Dv6uAu7HmJ4C6zRv147uevZqpDA1wV6mISllJqX2J52K70J1n09KRIJ9XR%2bDeMAb/eATM%2bZytMKc/C8oR6ODhCJWyBJEZ2TxOjXJ9zcPjMh9YksXtT79eSnb4nUX7T0Qi6L4jyWzcQRKF9R2qClsJTWn66lqjiBe8JF6a5GWjXzlgkvmZ4H0ZVH1PZUf2flty%2b2ng/sQztgsKxfd88%2bkbCpgvVB3CByBm8mZDU6zLtq8BubrFnABZ/I0Dd3ZQYa4twWI6R8i/mwtUu1FiMuIL6UJ0Jqy1EdLWkb9rJ5KErn2fBdW8bsPJa%2bcQQv9zYc/rm/XDfSuCxDwA6Wv0bK89eP713go4E6xlTWPpGawsWmARR2hkBY40LIEeCswNxMkCUEcyLKfq/hWJZGht/1jV5/AIwQYqle5hzDr17dwqeYwn0NKCt8VcA2tv%2bxH92JtsbwYHLOmFoJ5MO0E7rytOaJtb030XlGHksjgicGf/o%2bNIlWAbKtgm%2b82t8pmvta0vGsWe0QD0Zo9at8yJtcypu3kf53n5vAdu6/uIg55oQuki9KVXq0gFygTwDQyXGc52CkkY5cYk1Ltj5khp9dP6pk8tkMgjK7LKsZoaWahXJt28JAEotfeJ1bo51vA5qOZ%2bfbXytzzAuMjQa5y8BsHd4smszi9Ju8B8HmNacoGiMMhdYzRzXu2hjxrq7uOln%2bUcTJyWFA1NPG03mdyZSrtS0962HDrus90MMc9LbDdKYcClLkCyxCqPsN1Rp5lhkqDcn2I4a2skXsYkLvULY9zptFTIOB5Mc3wiDHE3aeCZVomzfZT3ZsC3RQjedjUGzaFu3c9xnJcyh38hjPHCXgbuc203wNUJQTujsSE%2bf5CLfHT6YIE7eYqDcYhLZwu8/E9%2b%2bYcupdOPf/SxV/ujXruv%2budfceDud0zdOyZalZNKC/7noz97us3QN3/33/6u28u/9uE8a1/LUAjrniaxlgpWskNYbXq297YVrNs4oeCZ7DfZ%2bq1cgDTH2e5WASalxqR%2brNiDX1sVErX31WU1ovRjxUbKamqMr4wXro03y0e6xfC8nge3CdbrT54D16F5GgfRmoGtX4//vmJoGL69IRVBgGYDURzh6P4rwtiFaMgFRasSt97Rx%2bVfP8C7n5njD3ev4fI1YDIssftEgeUsxPbFBebTALvdLo7bQ6SHfWSDIboNZd3JKgy6%2bQlPdwIb%2bkxT0yvg3eSgfB5bzQhLul8s2griyb63pjLYuZN6E21zn9E7JNfB8fe12kj24%2b3WGWdjoD2R1PXwbjzkbLOUQ3dlkofrCQKJa8yxh1n3bbeWEUcLDV2%2bVrKpLBptMSEueo9YdMhYbxVF6%2bFdl9i43eNEKotyDwWNPLZoxM3VxjGqdD0710MRCZ0fhb31RFSC9IoCdiDD6A%2bjKa5RJ0Fr3uxk2/lb/oz35ROnJwF6fyd4JzDxyALfiUOyjJawK0COoJgM14b3e339wQmTAGazMJHeCito5tjthlhmIchC%2bjsg3slijbk%2bGvd1yZtouikLt/VivSS5dDxrQ/4xkUQ0ei2HSF0yUntJtQrsI4ZLvuQThqD4Mm4gR/5Q5C3M%2bPVQQ6uy0OODljB%2bBcodgdr1ufZJEIeBcL5L7QRpvMRsFSOk4T3PS2Raqn42pVa7fv3iQx0jMpmCLE6aa6/w4fEKffqzl8pn6hiod7NjjDvHFBZP6vJ0zGy20qUSSbSFXXcJ1EhTfacLlUPR5lLkIwbcJaGyRoBkzQjxgiO8PpojxOgXmdi7VnJ43rtFfE5ECMxT3m%2bZ8h2OySZDl9wH9hdPRpV7FGBFu8cUjVILK8nGQkmyoxIo91mPgwtZPivXtUdANlmcAO68LgHpdv1D63dSQKsWFqBcTfTKBLuW67oZ4fHr4%2bU8isw4DT2cNgQNmfdit8YFhSwWTpEg1o/H83ejNRs%2bZtJTbRDh9x0aRfDCa3UVaqKiE5c3kWjaw%2b%2bPJOJa4SeJem/clLxNtnjgomFmWk1xgWlEsojo1LPm7fe2VnMYAMp8PJrVjRXUM4%2bA46iiA3WaYeRPoqz2ngwWDRzGmbTX0bQQGR8BeRKHWK1YK6aFxYrymECSUknO0PxC5k7hzQps0/qRxZdo/UgdfqVr10hcAyX2Z21JRuV17HZYkJIOMk0B7mTbmXsSTpf4ZBnibq%2bBt7VpKwlQe39nAfzY0wF20kjImc/tZaJI%2bBwTUUcI6BZFZc%2bfKjLcyoEHi1BqRRTLEsv9BW7mKfaHIc40p7jziX/2Q5fOBh9/FBY7rc89/uwr3wJfNeD%2bb3KrBPm/9cL7fxHxzvtkcCxmaLVDsWvs99UTnRrmTq/A5EjdHFjpdHjI7CmdvvoCpNWlhSCfFVMHBPK0eTSwo7OVVjMd0WnmBHAvMT6KwfAdNXqbIKAu1fF7O6GysBGJ7Dqrp8m2wZ4Kw0s/93kuGmNel0yc3RgHY62eev2VNq49NUfJW3u5RMn5JYpxfOclNI7ehsE3Fjh65VUpYNL75kt4aTSSWaKYr3Aefbz1coSym6F/vsRyTtYhws6FBXZSZdkZ3isHQ5HLCOvemslgk0jZQWXeZdJP9PqYpMq/u2a2kAx5bXMmvDl4bzfXVVU3n/1DgPzL7Bz%2buyrRzBhmgvFyrswsK6ZyPxbK8ARPsS3kRiaN9loBQBnWNjX7rGDL41Bz6NITexYOluXRcTIxgOoA91Tg7hEBA/h19lyAuwMCAYYqVxnbAoLnOJNSXqOX6xaUDpbrn/He2OpuhVkH7tI3Ta8q5eFr7Sug1TzYPeHUQbYD5DNcpLHgj4ESB3V%2bGAW1Cs5kDjZrSK%2biLjp56/8ES34N/MirrJKtF119LcGOEQleK7Er5Ta0lmT76H1Gspj0jRKjHll5WUjQiWl9k/7cyMDTKGU%2bBZJ0I5HVR8Ia2nU5jahOyMifeKHtPhslZrQMocWNSSaUCRCjeP3cj%2b3gXKRNGSajTJxaxqOVjicmzagGBsmWNntGaVQF7hJhsfwawfzDFSLa2Rjzy11Fs04bx41nPVspypLEU2OYNZqnbDNZZh7mrL0jdITZpeMV7eSa5qjLsZYA3e5LmoXtZs/vxFioAmQptlTldAiqKlF0QrCAW4/fFMC8GaG5yBCRlJnrezhrREiD4oRv%2b6Zjko%2blzq7XKwsb/pZrqywqmUgoto8smBSg0UjQtoqoumox9xiLhJBtZ7RC7X55F6HIZ3hM%2brg7465yG2W0HbQTKEuBHhI7LIhLEGZ2s95sIu/Z8J336YHgeZKTlX54q4Ncn0rYFSkNFHDeXstpmEviXZuRAM6XWlzq9NwBP7%2bflc%2bfEQCXtQjb3i1xXxj2NRsvAFmGmxJdJs2KpC3QZFIODnRssgWBHrsUFp/78D5PA%2b4ij7H%2bNa257Tio1y6m/Zrn5ybJqht9n/%2bURWbGJZpG2JwEYS4CX9nBKsawnWGLyadtTWqnLr83D7C6mCI4HIFLmCSgp/rKmHYF7Tw1589WVytii9UvSSBxjgHOmPXjilx6EWArmWN/pBPpmS4tSHXhcjjVBxeKxj1AOJ3geJ7i5k6Ae%2b0Y8bzE7gAlF2Q7zTjoLzO8/1KMVyOUq8M8uDMp8YUQ5WxIE6QAwe0lLu6EWFHmNMwwmpfYQ4Tb4xD79zOsggbKUXHj8vS3/v7ylec/8phpP%2bVl%2bxr76A0B3Nlmb/nOz/zDefCW902z1rVuQT/xEGlH/dQl3MuQZE%2b5opHYNOqiObDQ00Ptbq4ZImkhqD%2bORFpDQC/%2b6Qb4bWzRRFazcaTjzClzuE5MNsA4S1Ix5MYe7o1rGvqNi1JpBgsx5V6DqmK/6oy7/CwCrh%2b18fR8ipIZPPwxZ9I8xEtnJ/gz8xG%2b0L2I9s0Sz58fS7LV09EWrp6PkKcZuru5hPkuF8DB7hK7SQ/D9gjJcRdlf3hCLrMuuqF%2b0tTHMoLM8u6S3GmMOy8qwxgxuqoTJXCXwkypMeyndTeWfFbNtCZdfvldcpNt9oFabLMWyl4QkLMf0DNaNN%2b2E2W0DtyFKS4D7CRANisqR4uqC4hPswLIujWkh%2bnFScaOd%2bKRWkSAXYIsG4FvlVjq2nwD7vwdwSuv3ROvyJzSHtT13s7KsS9wX8F5dj9stk37TEmsrjH9/Dfv2/upe84TuMtkZ6BewKBJXXj43RoQ4X6uzvAFUx24L2uLjM0EV3896q4/Dtzd0UclQzxrINrLJnM4OPmx5oCFulMD7RUQFLu9Qhx79MVXSQ3/9PewAgQbyECKOZ327Gr6Y2nbZYRI9K0Pv7SMcSl4yDDOmPAwRW%2brifFKKwmFU3puVlWVtKhRu60FjcY5uv0mZsOlSl34EPlgeU2kidNUAWMQIJxpDk3abaI0%2bZpUgl3GUuFZBWu6Kbi12hJU0yWaAEzSgft3aqBe3rgwwtHxEk8NIqoEpMIp2XUGCxy4Twk8Lc%2bhQzymCE3CNoGx7xIpYt%2bphZZyal7ke323KxaVFSUpHXgEcNedCaIrf0zp72Jlugk4/db9%2bdr7ReBeT8RtNtqYzadIWgkmixm2KClCR4G7ScUohVmNZwLWdfN8p9rzD1gMKJDiS9S5U%2bE%2baCpgrm9k4LkRvNNmlpcnILG2E58vx4ZN1t3fl80R0W%2bRIJ2ExOFMrSZlo03vnNW39VoI4vn7%2bkLC/86%2bRMbfIysPd%2b6Tn/jdc0yRxXMcS65Jfc2rfcntKRWsbzLpHk2os%2b31BXv9rLqvJuxO5VhrT3Xfz/tT1fdrSayn3ROTXZ1p558kRiTad%2bJGSoznNM8A9ho58qwA18ocmgjaV3mBzlYby2WOrTTCaqm2rnSqE6/2doyFDdx8vlzOnGvnCu45XuQkiubY3%2b5gd39iNsUhjnYTnD2e4HDWELadUs/5LMZeP8enwhiNRYleF2W7iIPtVYazLfaBAG8aRLh%2bzOss8ckVyuUYwa0pcGU7wCUWdoxZBZ7jZIjxIke2oKa9xME0xmIW33hz%2b/7zz3/0n/63n/m1v/bY9vH1XoSvge%2b/fJT0Vb7Yp9//Lz80Wbz1A1lj531PJjNJfOP/idgFcBPA898WtuNn3CiHqTZnhfwDhm/7BP/cJ0DapXXkWm5D0O%2bse8UobRRr4/xVOeIRxFJX7/o4JrFGoWaZG2VAScx2d62/qzCDaNs1o70uGdgEHFWFWSasfqkUz/tKyvAmxm9DvPXoVXyhfxU3F8d4pjtA9msv46V37%2bDivzrC6FsvX//mZ8Jr6VYuZZjpsb19YYkVE2C6M3TLM/JSZ4MReiaXabdnmEw6aLbHyHMWZFGkLiF5t1aT0TPCClSwdtGKdQZzdtZlMrqXWoHK3wXUTyu9%2bwobM99r9Dv3Lucult8nbSHSGWNmCTS4KHBMx9xQunmwMCQHxUmtlo1ragkmKRGpCjm5asGjxQ5ezLWF7ixeLKvOyruUpqrOauBf7p1sfQ20a6xWwZUAd9OBE7xKxT2bXYM0lMmD12eSZgH78i7YxjYXeYxtsuig5SdLdLNgSF3pYNEEq9OjLiRNJooqeJe2DbR9ufjw%2b6OyizIYX7wQqFFqQ/mMvHcbtpxcHJB4lUUMJToG7ETOJCycpGNgf1Jgq92QCZ9fkdlNBoHkfSznAdoJJ3EFcqdFubR/aVtGQVQBC2cbqyRWqlqM4iJ4F7nKydxH7Z%2bmp6eUptvKJGRd/3NK%2b0THr5TYSG2BGAFpfRbjaWaYLnVhHfGzlAXOKB1aW9bxiqejBYK0reCfgJ%2b3MJ2iTFPZV447pmRNqzJ6cqmPDyLhEytHhVdFGVbgnIBU7BDNtYa/OSElYMTpKMeVHcoPS3GE8e4juJynN8adh6c2uaT%2byYD7lP3FWOUdLgy7MaJJhnvstwmfbaTs/FRlPMJKM0BhAFCu11aTwrazI9kVeKKqgz3%2bvtc8YUgj18b6ALyGGm4XcpzqoZrrpOzLOES7mQqgb2KqwL2YIJIKsTpJ5Mxi9ffHvdvlK5XPiPCDkczZQuUzjEba/SjjXc0c62jE%2bpWsWHGRrjBh1gD%2baQnC9bWm6K7tPa4nv7rkRjuOtgMBurup1J%2bnaMS9rxeP9pivt2Xt0nWtxgTWGijnZ2TS65p8jwLYJVWHkMXd64Dx%2bvl0QaMJwZVE0EkJfmUSmzoDr%2b4zgbDrvnVjq4Aa0GVJI9iMfnA4YTuNZhF6qb5jbMPRXGW1rTb94QspsiSAvd8Wv36y7CQUttMI7Y5WSe03aZyRi6zubEtdZLiJk0ypkQPp/6255FTwRByTKM%2bhbeXxtI0oyMVNh5r25SzA7zSBvTRGc1GKFPHqdoy/fAHY7kmwHZ%2b5meHFMfX4MbYbwPP7GW5Ogae2A1xgYcckxEEBfOmgxGC%2bxJ2iIRWQXz1u4morwoOXD/7e8cu//al//Y%2b/%2b3%2bpt/vjv3/ttsAbBri/4zv/7neNs/f8pSO884Mk0660Z5IMpWWEC4wPIvS2clm51jXuEvY0BoASmQktHe2uZa7wJDqCk24uK%2bPxcYit3Uy83E9j1usjUDpQz3fud6/RxnmKK81n%2bXicI7QsfL6slGIwhCjLhEDBCD%2bRaXrD447Jsap7t4u1sN71l00qw98YQ1qtR/JAnA3KMMI7Dq/jn7fO4QeKPfxvzW0EZYgneoPrjaN//tyd4bdee/%2bf6b%2bPTAaZAgHuCy0WcXarhxVlJlsjtMOODLAKQINH2kOKu4xPmaUWkHIWh6w774FuM774mS6SCvDxO5XR%2bPD%2b5XdJ9y4noKyAmZKTlYxFQ516dHdc4bU5cKi/mtS5U/OtxV/WQM6vaDM07b%2bVz42V36yySnBe94p3gC6/tTlFKrVSvmCTN8/HgX/Myn5N1VRKQplMXaW4bIxMMcpFAYG72zbysFUBqtrNVXp/TgimNyf2IpinlaRo3S3RluCb1%2bRstU60%2bm9n49uLHGFHC2nxt8Ram2Hu2i1WV8J9hOG330nThepiM2dRpkjZ1AezEj2zX6dNDc87WWboEDQahXq8KNBtqAMN246LDQfgBNxk3Xk8Et6iZLHkb2Iy1tbx90aSUxVTn7qtyJAa6bt5jwTMujitr5RqdL0tDuT6h9TnFyjaCTqxarnl1bf/EPATfXb6BtwpRVvE6FjiaMVYn0Ci60v2fijDmi0u5aoofzdPc1mk2KBmr6kewJJQO3NgwracAWdcVmUAnYtg17g/MG0%2bPyPe5f6tBEipLacr19iY2NqLKT7pdHCxE1PDvgW6uDDpNEI%2byTBvx2gvVS6j9am0ldqLAmVH6y5UDKtdF49HgM51ETfKoPg8eV3yc/Fjrz0fY%2bP7LbXF1Msx7UjVnLX9TfJAl5lyNscMHXTpKuIljclDSAOrNInJ%2blsh3WX6Mr6zu2/RW35JtlgbpJIWsk1MTuMLeoJ4v0/eostf6taS/huXBclRva19PLJppR5xkHvl4sfsMP0d8CRZf2flvBY9k%2bTMh7M3HnpXNnkx34EtKQm5CcA6ETxeQn28XS/lLzJLMFI6jMEXnwtE759cJHCrS2l08asdeUyvdZO1quuNHphuM9S1e7RaxmGT4kkFVI59EYmcCIOu%2bs2zL9H5hoA7K0pZJDbJkLMmRTtDEadYZfRoZ0FCynNzHBxE6PZykQlyHGMtBxbsIsHCU1K2tp0uqnw8erlvs44hx/lVjtkyEgvIw2mCZlCg2SjE%2bej2XoGXBgHudZu4sVeCddye3o7xwUtAuwfsHQEvHuX4V9MIyzArF2MED3hPjQAX%2b8A7VxmWLK5koP3cYo5P3QlxtIywKhrY7Rb47Z977sf/xFM3f%2b6x5eND3flr%2boMvHyV9lW%2bDOvdJ750/8fnPXP2eedm81ivGUpSEoIaOMgxRiYMMwQXlMc6mH4WalHoUidxFnGRMPiOhwn6Ol2YdXJjPcK%2bd4GpzgiFjxbYKfxRwv9c0kH7qaMXFQoDDdhvxISug6XXuJAQZrIZWip43CjUd6i66OA8Hr97QBe7J5%2bOKUqhH8nwv3sNOEuNQWCpuDNuHKKMY7zm6jv%2b9fQ5BtsIzyRYmjfJ6MfqFDw%2bWH/vdt37TR3512TVt3iLAzsUllosSu/2ODFLHjQkudBJh2Av%2bLw/Ras/RCCmX0SHVgQfDfiwHw4Lr1M222xNQucp9VpggLnoioaEzNR8Mf7eVzASo6XyzhkM%2b6L6W04DPIvWqpRHdRwhaW6Ew7s7A81ws2pS1o7XGnT7mNV9oPzvdTdqVzyjt4AIU0wLzFhdmpecrgfmjtD7c3HgcXxy4%2b40w66aAEFvEUquzct%2bKca/51gubRSZ/U57juno7KVlxgm5eRsXo1y5IJSdrNxgHdewmbHcCXFaqpMe937In%2bVYOP7XOz7wA72Kb/ZATmDBGHplwpr6mp6%2b/Jpvgl%2b3O3DdntyVqHYaYcFUusmJWo4wxXmTyJ1HNcF5gu8OnYgjVdPbBhLRXiKgMMVlq8plgtg1Q4/IjyUFbr40ffqbmTsN9qgJPbs96iuzkNYdJD/Ob2LomvNA3QNe4J0THo2WMXnMN8rmbBRYrGZ2fs6ZOEdDNe6PnuuBbJjq3gW4G7NnzObth81jyIRNwR8CDTHXusmizKMaYmIq5FO4AuHEDvsATgF4WomEX5tcsIIWVZTFWAnVWT%2bZLZOA7ajEOp%2b8w8064MUoZkewgiEKAblwq0CYLSqBuwTkCMnGMqT1jB4VkRZNWivlyJr7o1ehqwDArqb/WsYznPlrG2GplD7H0PDgZeVZIJRifootExjztXAFDeLUcg0JqRejoJhtlNZMpYllBrgcPSfSn7LAmn5GogoF3zmf8TnTz5nTFIzpDz%2b9eL3mVbcbfu3SGf/IYHi2Tc1nDUNLjspsqL4XA2wC33Iolk3O/ehd4rb7v7zx/SxDP88mCoHaA4xUw4OK1n%2bFoagm01v94bO/f/AltEXUm0Y3VXekyo8bLuglBJkmoSt7x39IfV0rMiIsMF/jmikMfeurZOR52ZhFaAwJ7WjhyVdsR20cy7hx3mJQrtpKDUh6nSLhyOsYEMgfstko5Dj9n9GsrXYg8hvJUnEvRkwpvwMGIHu0lGjHZ9gRPdKe4eZwimCzx8SttbHH%2bXZTo9lF%2bXYHgbBLg2QsR7gyBm8dZ9Qy/GKD87F0EcTPA1WGGMwOqZkPkwwyvBBGK575hEwAAIABJREFUeYnbt5d46TgRkqM/iPDpf/irP/7Nb7v5cx/92f9Q3Pseb2%2bcFnjDAHc26dX3PvehWf71H1g1dt83EJ27Jh6qs4zaQVaOLzLy88XKcX3ewZn5HL2tQpJRnXGvxtWA0FFfwHKzuouNAHvNBOeXLBpkm40ZGnzj77Qp%2bd97sYJ6DhZSVMaE1VnO7PMIx0yyi4B7SHGBgNY8apW5Y7JsgT10BLSTi%2bDnBPEXQoJ4A7p2fmfWXB4g86DcQwMvT0b4K6sH%2bO3tNyMrcsxCXG8uP/nh3ea/%2bNj5b/6v/td4v/n2rB8q635uhcWixJlBV6QyoxYLMVEbrklvRcHFRyDJqkncwmgxR7fRrIZOJtuwGEnapm5V3YJ4iVHRRdKarSemMkXSmAorMFutu5%2b0KydgybYF5sH8da0h3UVmtWijkcxlUHY/da/CWn8VHb8xNCp4z4CSAG5eAMEs/eztR8tmBDLL2ugl5k1lb17rpalAKcG4FUMS1t2uTcC72BqelMvUwbyHsQUIi02iOqtwMdNvs3BRKaDfIw2sHFvHpTy%2bkdoiczmBr6iZpNRGmJm1u4T0XUarTItfZ9wrbf0plDrP6wy%2baO8ZrbD9nPlXlxPVkrqVo1djlcmVk7lpzV17Ollp0rAyhCV6rRhT8YvUColtt9O0m%2bNkKcQcfS/FclUpfbJxA9Nri3e4yW9ocsw3azTP5Nh86uRD66403nd4HU6o8%2b8EjOJvv1AokTQZqVsDhc3hn98RJD/YsMis7/cottK6asU%2bcj8eizIUPliC67sr4EKsx%2bdLcD4E7tHVogQusJopIxel7usAlYCeXuxH7AMEE7XCcXUgKM%2b%2bljDsgF7MPVxbxhCVr9pMFiCVZu3ZjOiAxeqsw5z6XHl%2bwrDXgDtvsPJvp9Ut83xSJiCzWFmAhC4YUrzMbGeZp2tch8hhTkOQtHOkuB8l5hnHB31zK8be3hNWS3XXKQL37ZYConVExN6uWohkhhRJQScaG0tYHNhYd32uIbL5DHGSinVko9sWF5qT%2bzBCWmLQUDBbr10hiaOWW%2bJyF0pw%2bJ7I%2b21JsJTLnJY0vdkHT2sfB/PizmQMvCe18vdcKHBzBxpfRPAzqQVwCnnxWkDeQTNziVxn7wER9bdfv2eB5Rts3of/m2x2PQF1c21evbsqRqn82fnG0onFSQLux%2brHQxZsSpQ1Z1uwfZuUxqy48MtRxkmNaVfQziqt4m7Tz1BkytBvp6Ek6m%2b3tE85cKd3%2b1ZrKuC9PJuiP57JAni2ZKEmkomUEuYoJ018thNgMS1wr9fEC/dKPPskymdYXKmtxZU43n7hKEeRlWBR6T%2bAatpfzQK8hTl0W0x3o8kFx1yVw746CXC4l2ORN5C1ohtnX8Qf3Hr%2bf/gbn3rs0/6oLvY1/fkbCriLXKZ4z186LN/5wX4xk3C3DBRSBTXH6DiqBj8WRDovrgGGIjbuVBlz6hj1lScw53Z2OddEkdrGl/3Aii7t0G%2bd1fKMAdinuJK/W81xMMqx042qYiU8zOEsR5MWj%2bQCmF2%2b00HjiBSUUk384wG6uISRgPMzmMhN7ZvH%2bW5YY%2bILZoN3cSacqLWiTbZbaYz9UbYu1MSVdhDh3Ucv4Zcb54ThudbZwiIsrreL3/nwS5/89r914dv%2b5Ye%2b8d1v/f446r1dJuHOFEwWWiwKnB30MGqMRYcsnu5UhdqEudPLcfeYYTbVAjrvLg4p4qCmBZmkmmrltzwX6YVYRzY16sDNuCpprz6z8sWrez30E9yti2LbhCVe8brbQ4yl6dulBHpt4vVHeUJCQi0uEWxVUq/EUsL05sRRllg2NWxPSKf%2b0aWwzicWfqe83tJ9yNSae4RLOWRRYfpT67bKlteZQkYIrK%2bSeExWBcZRJJp1FiBi0m/SCCXZdlMxIR7p9lu2aWOWI2BI11IK/DQueeG/jcDW52HAnQycF1fic6fWv15siRMHFxp%2brvokSSzmAIRAnZO0REZI5tqigH%2becH2Bsv4E3wTGjBYQuHNj4Rc%2bES547uzrZ40WIzZqIepAVIC753sQvJMhFTcTDcPTEUWPF6OkyJ6bdEhbNRvLz4%2bd6a9H29iePbu%2bPRJw4mARodfKhWkjKCYYlr5RGz8qbGPAmcBXFxa6UTI3PF7i6nYT92uVROUxkhE0qZc/O1YrvWORKi%2bCxDaYNPT6CN7lt2TYE6Bj%2bzqwOYqBASVFtW7ni%2baqK/v1S/hnbft4oj3IMqasApqDw5lHiKRf04GE7j1hjPZqhVnQQcpxjZVcHQPz2LXVCvsywXwSFRIpEgmILbQSEh89GUH1vWfSt%2bWNuiyvHbcFnG9ufF9kCwMptjTvKOGdthJMFzO5nn7TS/pon95fxNixKAcJnbmMxXqcNsaYoo8Ohpjkvarq7XI6F3/3NZpV5xlPcC3NHYjAXfMTNLGVvyF434zs1oF2vWaBv1tuPfnlMO71NtmUzfi06GSBs%2b/8nO9pxe6zvxvjz%2bNJQq09Ay4eXGlEl5oT57N/%2bAJ9ZNa28kj46lnkQxyrfMymXIahoVM277ebwP3UnavFdIgFCysZwy7RjXW%2bc9X2jIpTJijuQLRyRIGkjNBqrlDEHQXunUDAfdrT6E9jOMUkScXykQYQlMrQr10cZAy4S8GlZI5sFaLIS7SbBVruMy/kHlBmORZHCT7fLvB7rQZ6dHdiNdMl8P4d4FKqCajsOYtZjt/YLzFPtRrqmImoiwBfN8uwjAKcHwSSB3HzbiY1TKZZhMWkwP44RpFFN7YPDj569Mq//tSv/8L3PNa0P6rjfI1//oYC7u/98z//7KoM3vnFvb/wEQLXJ7iCtZfjfkMrl8oEwpBrCdxrpjjD5WaF3QPsMYzUZwzfmHJjYci%2bcSC5Pyoqu0Y2DifiPRZI2ooxHOlgwl9u9SLQ2rHmLIj7UQfn8jG20lB0xmTWaf3I6qdk0Dk472K89gs2j16yg196JUH/SoizmIis5gCp7H8mnAqgP4cx7qNTgd1dKHgXr9icdlIRDia5sJ2hMO4R8jCWY7z94AX83uBNWITZ9Xbx6Q%2b/9Ml/%2b2990/d9%2bNn%2blff%2bSNK8%2bmNsoNWiwPb5RY11B45bY00aXDGc29boRhGg1WZhphZG8zm6zaacX6uoOpjmWZm8o64Fw0WAIpgKaKLFH0HWfKmjPl1nOBhRtpEvEkStCXKWMmQSWBhgAVrXhNWEvwnaKVthzsOJIpFMpDMLQX9gxAkEvw6AJBofBGivdOlB0EDtddvsxGJKa7JCrAvrrivsE0wErWOb095xB6FsCQntvkbF000ALjWhrFDRtAiQLHOMqdU0iQLbkM/dAT7PT6abrDY3Xh/7X4vyDlsYcNIVX/cag8o24rn9dwKY/GZqI4MXW6oXPtq8Z49aeHg9Mf92ufcaKpEqtXxetXnZJ3VvV97n3rREvxXIYpTrucmK724hkoitdoRWUKhcyWZyLiQ4%2bUuARKJfphXis%2b3GGMvOKrlhEZOx9VcuVtkpKMMJbSXSkVh5LFKbCijRtWoJPOBCxgr51MEvvc2n1IbXXGo2mXYH8eci4L79QyNlDM%2bXOBuoROV8E7jPyf9BEw/O0ncROB8rc86NjPsxsQ2vJ9fKpt6x65V%2bBRRZR3Wm3N%2bHYVOZdr4G7EscR4NujNAWNbXUypOPutbx3f6wr2t0kcRw479P5HXUEDp17dy2igyB1CwAVlP1k%2beCnkMzt2kjNIBdW4SPCOAJfvR6e1REUkZjBE692jU7xqabCZtvENesJcWXPbFiSv5O%2bwihLwCL%2bZENT5qJAGzJ1zH54jRPkNIy0EQZ%2bXQuCcaqY1/T81KngkmsrNhclggFvMvRNzRc66bm9ycS3e0rzzXhP%2bt/33wfT/u3S2actSfjXv/7wWyttye7T1aczLo8W6sCWz/uyZZag3w5pt3aCclPDbT7cergXWwx3aGsxsrUQcohF/8m4eo01PJxMxAo%2b/M/RpIsigIT5he4xM0WhNSvF6MYI%2baQMHm%2bQbDOQFKM4WqJrjHuqbnHELRzkU65S6evnuxbSYwsZ6VdnUf42bm2FlvS%2bTJCP52jGZdoNiLsNxNsT2bYS/TPYSfBucUMrXyF5xdt/Iu4iUFeYr4sqc4p3wYE334prux078coj%2b9mwSeXKPMpAlYJvj4P8MxkifM7rKESoBzn%2bP0jNa6Y3Vvi9qyJZdlAp5njs7/w//z4xa2XP/apj/3o44qoX85L8zW6zxsKuLMNn/3uv/Ps/vJHf2Wxal3rl1Mpk06XFr4lURjifjPBueUMd%2bM2zmbzCpbzLweTTCqUCgtDYM99lgxZaTO4Jo5/p3bxeJYJG34RY5zpRTicZjhAV4AmmXEqMnXQoKIR2ENasV0yxwaBadTVeeauyF8muG3adbLn50MCcj3HfdBxIsS5coxsO8XxUJmnw5cz9K40BNRzn3OY4os3E1y7MpfQWzehtk/xynBKsBHhpdEh/mJ2iH/cPINrnW0dVMLs%2btMXfvW//vWf/3Oy0v7Wv/hPfvDOnSe//W3vevaD1LKjM5Gqd3NWUh10USwClFtjpFEqGfQCfptTTCZdbPdYZlqTxx4G7jqhthpLtNDE0VLVhc14gV5Z4CgIpZzzmmheowEn4tpQTcm8WCAxSxg%2bpbp%2bXSZ4Y0HlmZme3Mdt923ndRLAOlZU12B94PFSVfWdoMS0GaKcs8w2sGqEIsGqqrJb6fVli9du7HDNzWYzROxgtLKQ3BwAanaQDtyd5SK77NfKpLwwjUQeQxDJ42nb1oC7TVIu96EMRphunsMvbMPFxhlqTi5VAq2w%2buraYesakThx4wTshWM2NbXyXOgU01gD8jpY5yVwH14fawVtU%2bds7VHJlEyOwd%2b5uwx92TlRcrG2Nymk2FJP6NZAQsT7Y01O5bMlBqTjgrDu1LnLRVu/8uJe9sxZQZFr/Faqtoe8WSZkcrGvrjq63Kr7wZPNPjKZE39Tmjc572vU0LFDCH%2brtyQ52aUCbiZyTizJtM54EoBTb87fiM8zE%2bUaZNQgky6fwTna%2b1FbvrJ9a8Dd3x%2bNLzy8cTFx3FKG3TePFPLfXAjw%2bkgU9G0xMpzqODIisNc1g2zSj7pm%2b%2bgSJv6OZDQThpkZ7Np3khZFjD4TTzcuq3rT7UUXeYxFZCjxO2YV6zRGlx2Ublz1AzgLLxVWgYXJOzzy2GKlXMm65Hs7xWEWojUHlibbESKhwXEnEC37dnNlEHs9/h8sApwZtFDQijPgfgG6LY5GE3nxphYJlTbnYjktkM8WmBcpOp0CBO8ybkllPKhbTdrSaNZMFy1SvTsxj/BTnhvbmpVVqcWuT9DyuWnVX0/X7mPgZr/w8cCPe6ICsb3n/s7Lta4DFhVD7oB/c2FRjwLUmXyR/NTYeiG%2b7D789rk/%2b1p3HqPoaxVfvwcunCil4fdJGCNhDYKyxGSl8y9duLxfiTzVdOw2LMqYMF8wT0kPmuURzm9lyGmfxBfruIGyn6FFsosAnNEkEoK0gCRoXzEZVd1iVBIDdHtWTGnFhapKdiUqXSrbzn34/1URie3jaqVJ9K0oR9sXrAu61bAOQ4L9To6Ph03cPSrxZLtE3EH5A1sInrgQI8wZ8QfujHPcnGpk%2bKXDTKQwYSPAtUmGnASNWT5OFiX2uO8tsuwtSUx/6/dE%2bNgPPda0n/K6vSE/esMB9%2b/8/r97/uXb7/nJZfr2D0ZEMUWObjvEfqON8HAiq2q%2bIDvmN7c3JS99UoIhekq%2bWPRQXc2xP85xthvhQbON5sFE3vytXoyjSSbAmY10gI4kJfHvZzGVZCkvNcFBdN806Zz07pepgOy7Bakoa2JqTzHBPQPv/ifBPs/Ba%2baAdqaYCrNOPfuXbrfwzJMLPCg62C31tzze%2bWCC/bCDFYs4lBNkuTLvwshK0k2IMKAThw5nmbgdRJgvDp%2b72P6ln/rMJ/5T8Wplwu/do/IDZ576cx%2bh/zulI3l3InKWnUFXklTHrYkAoyRSxp0LhSSZCHiPGmTRGzIcrqUya1AmvJNdF6vFNeO5lFqWJEjaa9nktoJWiuM2WaRot8ZoITEZVICIs28RClPvjjESxafPtOnIOcF4UqVGXaq8NxmEOVF4QqkM9g74LVxL8CptKJ7dprdvqe%2b5k2PlrEBMO0Y6oJjcwCe30zT1AkpdwlEfHszfnSy4MNC17zY5uDqr5V7n3IdSGZm82Y9lsWEtaDOtJ/X5od0r333d2W5UIFApwogF2Sbf6qB6c1QTB5aa40x94q2eoVVkrd%2bXLGS4eKajCydhghcLV9V18TzegsljUSCORnVJEIuk%2brMIl6U46/Dhtun8YFVbSaBXnekUNCuErnQA8wGtjYCU00g1T4bZxP9eE2T5T%2baSsXhTStDuXvhiZ6oif1m8rLSADLHAqCXmGAKO%2bRltU1MDYtSnu2PLnLbvdHAx/blgiQ2HHrLrZPtlnKEUxmQwbSukUz0ju9%2bqDxl7XQfrlSzGZFXCdEsnPinhiTqxuLzIVx2tYMq2Px7r/fe58CbqsKJDjrJ4r6MwBkYZer1HaM/tgtkHhHUvdBGfmn8/v5axpqPPgf2FbWTqQom68N%2b8nkGhAJ7dfisuRFoggC1U0C6NXwKLVol2nKBRTOX6%2bfHhMkSrmaBVqtaHUVc6xiSYiEUk5T1SxG1JdXwp3u/sIAT%2b/I3aSFLKGGCKRDTStIfklc2ZqC81LszKc66VecWms63Rn/E0Roe/OaWf2uPQEbxmeFNn2U8kXVs/rpMAo2mMXlq3HdV2fRTw9nb3/uQaeI2a2phq4%2bVp0QD%2b7rQoQH3x5cfkvlJl1u5dwLmx7SejNXpethjHA1ZJteKpYvrg1U%2bVGrLqp3wEETBgDko3l2T8%2bVytJHktbatgWnEajN6QbWfuUKB2u51khcDkMZybs6wQ8o5Egs6DochzM3q2p%2bqkJuCd41dunu3GuLPQEoE7C6KtyhAJi/uxSGQAvJQ38KnDEvu9GI0VsNUty7cCweV2gN2OSn/J3j8Y53h1WuL5CGU2RrBPu11GHFgRNc5wexJgf1ZiMVeJz807JfZGTbSadIiObrS/%2bPmP9g5%2b4ycfF1d6Q%2bL0hy76DQfcCTY/e/NdPxw1Lv308bglK%2bSnkjkeNBI0Kbb0RM/aJOaD32qrIyw89erZVgc74o1mFRk54ux00ByOcS/sCvDWQ1CiUOAQCWLjn2g%2bRdBOuYro0UNKWAqETES9ucL2Zd3zXEmGvGNMOfcJcM5Yc38SZAMOb2YC0O/muu8DymoMefI7OZ7dz9lgii/daWP3coD9myWuXFrItZzQRIoEJ8aLxwcygb3pyhYu3jzEC%2b3wuSe6v/yf1BNSnv13/s6zF77hP/ip9ELrzx7NC7SGc3TSCLu9LrJViWE6QbrfRedibg4zCt7pHNOKEpMq6YglWu5ahT6RpNp1M7m13VwYAxyixZD1IhHkQ%2b/2%2bTIVy8hG2RankMrnITfgjrCSw7DtxJHFfdH93/Qqr2mv5dQEOZRcLHJh0aVZ%2bTsCaidk/do3kjxFwuMTov%2bOEhUyanYeXxIKa23U5wnA6lr3WjxXFjn/BoVPvK/IQoALBmKdHGDBQVlYhNTL5ogrmnttSO4vuAA00faumXMHeGKB1tDJ8fUGBGk7giPzN98cUdaxk4cHSEnstMaxlAHZqQ7cieMorZqucuxKZc1aZIFtSeefvMRoDMR9lr5VSZa0p1VZPZWNrDeEg3ehQTXhtVLzsC9I0qX6ghAYUJJED3TithYXdTxt7SETvI9ZVbS2iuktFLz7acl%2bc6OchqTsjoX7I07KlmS6yU5T3kLA350DozbQN9ZdujXJCVv41HMEeeUE%2bmTZH/q8oceSnIPtGNODTEDsVgc45tApMruTTh9O5YskkQC%2bXAPBE2y43bsAd0sdos5d9pFw4Lo/iISAkhpGFbhAInvaitFZZCi7DeTDlTjSUApzPCrQ667zEI4J1u1QR2Ru%2bS5aITICd%2brRg9EMS%2bZAhABZeG6LVoF2zGqpenGdVoIZo63iqa0xoX2y7a0Ch4sQW02V1HjRGr18jkz6bvF9ajVTNEvPQSoxK8xPVCIPpbDt9HifTGMpfFWWBdK2DoiTGQv98d%2b6EOBGIN8l0Heq2PbjdwT7dYAvUREeQ5x6cj2eLBC1Cq13vNMWBRLsMELl4bf05HMS8oVWxpTVfBkONpvH2yQivM/4cR8qpHXKBQlJEylfzjbULcSMNpDmFlMlzvKEERe6auoQdMoKuLNNmq0CKf3ca4sl/pV572lAy2OWC1eP/yzPscsiYVysEbyvTKLVV307CZwB6w4UnBu12cmynyXjLtVSIwzSOfJMyZ7gXIr%2bZKrv2SrHvaiNzx2WGG7FavfYAt47AJ5%2bMi6TOQIGmrmIuDvNcXtags4x5RjB7VWAb5gs8KUzbSSsinomwv60xGyWY1EGePVOgfvjppAekyC6MXjx8x8dXv/kzz5ORH2t3v7G%2bu715umvybt5x3f/3e/aX/7Ih5dF6xpX4XSYWfW7iIYTrLY7aBxOkG91EPHPQQfR8QTloIPgeIL7gcpVZBCm57jo3nQpXm51cHxcIIoIHKk3V9cAahaPkGp9RGE/IgHtyoBDwPiDoIOLnx/i7rN9nC8meOFmSwA3Nx7jXDjFizeb2HkyxuGtDINLMXbKKV661cZbnlrgizdb2Lm8BuDHtzK8mWw7OjhTTHCv1HOdF%2bDexPaTMVZ5gIE4G%2bjvfDAS1h0ROpdK/P4LQ1zt7%2bDi9BBfagbPfcszn/z%2bj/7sX67sn7gQ%2bt0v7Pzw9/43f/qnb/0OFzIF4qMVDrYiPL1KMEzHwryTGabDDF0elGEnIwrEjVnFutevQRzvyrDSvtMHXrIPpJrqFFlB5qEQIMqC4yzf3GmzymqrGpx5X1G8wGyh06ZotL1BdexGuWwT9mObk7fpuymfcU907karSF7PqmnA3ZjwenKlgBnKT1yU7k4zXBTwMdpAT208/yng0CrSy5TuCxRJwK1JQXyRYP3A93MryE2wtvnCebVXB5aMKM2PtCJmPAhMUKQgjUmj3NxemprvB5biQSwqtUgMdDBaUZ%2b8%2bDn93D2htt7M9WvibVMLT7bMC105UHanmNMGDcdtYrlJhxwmc3mbelFNFmKKqbul45ACd4JmdzZhxGMYN6RKJxe8DCGjqy4zEqJOgD26rHnFVIts0OWhks90NV9iAC7GFanKItmdUeTGVeMejTNMueh7BONOVprA/8Qgal7nDlgcsBPEsw34iFgclQw7L58Wi0YKC6A/Z0mu/JMbwTv/vmcuMHVytmLLNxr8VH26PXu2Zdc16DUwzXdhPKvlOFg/oe6d98gm8aTT08CgX0KcxjjazzAoCuQM53DITCJkTJS2%2bgq8b1rVC3jT4BvGrRjZNMMWf5IEaiZbAATnzRbAMhBc57dnwJwLKGfTa77uSbfAskyxyGhKYDJrqYzGQbtAEqeYLadVJNLXKKcQ3vJ7jeIlWIiV5MlGptyy3WT11akUc5otpqKDZ0GnRtLC3tESSYsVVTm%2bTYTJF4lMqv2FQFvGDTuPFNZKdanF78jOcyMoH04aJ4C7vINzsuleEY6LQTr32DW3jc1PVXLiYwzPSxa%2bm2Yih6ODzOtJbly2I/tuZtCe9qLXPvPzPYr1Z/SNY1QaxhjVKrBuHtYXGtXnJoepDOCkWJJGS7lY660iFIGO%2bbSFnbUzjGd0jcnQmoVo90IMhTrXI/IPgvblSqUxBOwuM9ztBMjZjGKAoeOufGdymp1ygmUykIRjfn420Urgy1wtIOnZ3mrm8uzJ0nfaARhIGu018Eniiq0YrzwocZ4VbhOU//4gCJ66SJ91YDEBHkxz3J2VWKUxXjzMcG8aIGgBV2nb2gjwYFJgOinRpctSHmJ8sMTn9xKUC%2bByc4VB4/7//NmP/rNf%2bsyv/cePK6K%2bTn99I339hgTubODL773/yWbce99UXEyAQTlBWckFyGJ1cKZvcVyL00fHU%2bQ7XbSOx5XsRLXqplEtSzwIUjTCEoev5Bg8xVLiph1/NcPgyQDHN3L0rzRw8EqOHdZDtnleEpAMMBy/mmH7iVjA/Yu3WgLW929mePPlpSSdHt7O8PSlFR6UqoM8ExDAN7FzOcbhqxnefGWJ/SLFwc0MWwT6NxTES3JqAKmqRib%2b6csrGUBIAnJQGDB0jRLHE3UpII9Ilp/htEVcXE/LF5578RN/8q9udtDv/P5/cP7cN/7Vj2dn8fbFg7kMevHeEud2e5KgyjGOzAhZ5l47kUGKDHqrNUUz5L85%2bOkMQcadjBsHzXZCiUtHqqg6%2by0TE%2bUwzbmy7stUZu4imGO6bCMIlFnqiWdjiHlOhkxnTWFeyI6tSRfMlr4gUOAte9ZoX2FB7IarCrfGnksCq7mNcL%2bYkhML//MnbGtPohQgYBNGc1VgyOWeT5QGYn2xUGfehSU3Zw9nhXlsgl6637wWCOJ%2bBO7Uj8tGTb4UGCuxRUv8RiCJnwTSrlXnbi4f4qQ4OtbGitKwcnYhaJfzGrpxt5fq31SgEVw94vrqzDInS57P9c0OgpyRroN6XgcXgCS56xp49i0uttxFR3I1aOjIwjcmlWATiMd%2bpGBDvMFNSsHkWoJhti8XaXnLojMsatXU9qOUyFlTXofbqG6hwJCAlW5RVipW5C8E5eMMEysZL9duLDrhFfXfbC8WJKJenu0lLi/CICvbLqDdRlh%2bNjV5E2U3HCuEMTdAXbcV2WQpvUtTdkP3Grn%2bR80ytXfDXxr5iEA8jdErVfKyGaFj36a%2b3cleymN2kOHQEk75G2fQXW514hI8rDnJEbBQEh8VHXysHE6yyHFEjXlfKiLoYqD2nlZ/ZdtzlVlq4aKOF%2bJhsiYlLwTtlMlYRLIaC2yAoJ6dDH4SJ5XuPx9N5ZlEfQJszXuqIgsbgJzHa7Xasp9vj5KFELyzj9InngB%2bq1liXnYwX04r1xoC//FihrTZFjZHCDIWAAAgAElEQVT9wbEC9zZBPWUbGGOGLlJq3u1BTee2mLTnzLGWkpoTiQwiBywVkHZWmE5jSaT1cZaLgNGkIfIdPou6hKb26j%2bqF8k11t/l1wP4jzpQFdWzflkHHLwm5hFxEfF6WxLT2lXbTjTsNWeq6nnaQbrLCMctFbLyu9ksksUKz5XOY7R6XnjLFv2s4tpeiVc7QTutHndJCLgrjBR5VLtofrfFhahIplhjQGuhnG9nIoMhOaJJqZyPF/IngT8b80IfCOYZ7jZa%2bMxxgN8sYwTLEu%2b4iLKVx8EHrqJMpwi4%2b2qeY8Q8lGWJ//eIoDzArds5nr4W44njFc5thbg3C9AaL/EH4wCTIsb9V5dYlC00GP2Lged//hM/fnnncSLq6/WtN%2bL3b1jg/vR3PPehVfyuH11m7WucirYxXWvOZRAvkfWZLFriiPFVWpEFwAVjx1n0gMMAWfW7hRYGYmNclGTRDi6Yjnx4OxPAtvVEhMOXVxhcprewjggEdsev5Og/wTBeiN1yhv0gqdiZ4U2C/wjDV3P0L9mERb387QJvurTAl15pYOcyFx4quqQM5hApyLYPyNYXqGnbqa2f4MWbLTxzdYn9MMXByxm6lxqSKLvkTMbw3ZbaTfJ64jMligcRwu0As2l5vVNef%2b6Ln3j2IeDO5nr3v/dLP/id/%2bNf%2bM/%2b8B/N38Hba%2b0tsL8b4OlVB4edMd3YsKRzRzuR0CBnXWrst7sshjNHxzzdRY7hcplCswIEuMvALTGLE5uUH0eKFaZYrgjcdfJpNbTSXCqV8Na89Iozt2yBsJeLSGdx90rnN%2ba8JpM7ARrDvDymSDJqZ2cOIrFaXRa9aULmL4iTTQJsah7t1Ff7yo/Jm86eSpKjRQg2sQF3InCv73Pa4CFKWALXOtPFc7NU%2b6JA0FaAxGsSxt2qS/L%2buY/gHz85Jx/aPJpWVbCpJaEyIdUnOR5MsNOiQEGJwml0pF0sf0PAbQUM9al41VrXr1uD1jCa7Cc6VbdFtHA3gfuCgDgAdhPVdhoek/baYjEec3oZIcJOsxDNvFgmGtCg9nrR5IK1lMiDgy6mZx9yISuomvcWg2XBeF1Dui8R3btkxqQv1JX7VjWDdYjcFnEkRqWaqDm0cH%2bRqjhoN1rXpTTenzpWFbbevK5FJwvPja4xvggdNlQqI233qJlGVra64PBN2O0OcDSCVGs8HAO9zsPA/WgMbPdPHrhyienqQpyApEtmnoB8ruOivYrAWB%2bWXFuXBbDMstWqjjJP%2bLgVo7tQe1VFz7WFS20m4sdHxLElcKmnkT05Ose3NtCouT4SqDdNDiP9z1CpSlp05Ih6KearueQ1sc8cZZr11Gww8fBhC8lHNa9/Xge1zrwL496iFIegXRn4Ni0n5zPsNkuR4aSNNqbZXL6fzKfY6ccCvJ2R95ogQhbZyWgxmFAHjwCTiXaMTifDdKp7%2bPtGZt5ZZUpuZD6zd9F19a9HEvB4vv4aTjb18actJ1%2bvpfR76TcmZfPEV/Yn5hFzKhFcux7i5Tf1hUJ97OgagJfKp5b3MVjEOGptRL7q6izmZCxiHLQyIaG4UKClYxIEaNGjnQWaWqnUOiHI3rYoni9wJZKcR%2bj0Mxm3eIwtMvF2zQTrwrKXES60MwHvzOlaFSG2JBEFuNwH7gdtvHBY4PeTCA%2bOSyxXJf70lRhXixxv3om4bsDBfS5wS5HufCmM8eo4w6dfyoWpf0u%2bwpmdGCsWdDxYYdZpYEmi4nCGz%2b03MM9bQuoVw%2bLG6lO//DcvnA0%2bXo%2buf3lP6/Feb4QWeMMCd3q63w9%2b5MN51rpGmy61R9TbofUi3xZKViQJNJzINw9E7kLbR63Qp3OBWjeycin3dcZJw%2b0lhnd1muxfUN9oBzJBFOCYwPxJluEOhYHfuhLL8Q9v5dh%2b0gScnjBzs8TgcoCDWyXe/OQSD/IUoYyk5Koj7EYTvHSrJUz98JUl%2bpfVVoLDkZfJVlpTJz1h9Z9kBTfdhwWQKAG6VXZxltGHMkRI4L4Xoew2MRvuP9dpvfBxerif1jHJuhc73/YTQXD22/vv2n57fotOCTmuIBFJTrA1lsGkS1s0A%2b7NtjrMDGqe7ieAOwHQjEBey0OL9eOmSX7tYphLMF9yhA/Qbui%2bzGFoShKrz8iueSfTGyAyRyBhEI1B9oJWeRGgV1CWYVzrtJDKqtxOeLoT1JsEhk%2b7JSXvqJ0NkNobwgROYW8oG7KkWHexER32SifKEfWzluS4MRfJeUWDb7Kfehj7tGfCCYCgffM4jnfqv5HwLTFTU4/PCVKs2AwZyrXZZ1xg%2bOYFoXhM8drntRmgP03DXD%2bnA3c%2bgsqdwirNdiL1MfaS7P67KknW2TAD1/4%2b8jnw%2bplbTpcYXnfPi5iHTEiN0Zzl2CtKnOuqU0O9fQSokgk1FMJjjSXupPdGAH8QkHnWBMEhYtXJclVnCwmCbB8Y5XhsrzTGKM8kSZSg3TdZU/ECHlqd6R7HLHBUa28BltxoCWkM%2bqYmPcqBIasb1s7la7fTQLsn6zkelgXhdiyRkGKcCVDndyNjz6V6qdOudjl1cFTdig%2bGtSAXn9%2bAdpQa/DiRFLFCgF6oDh8sciMb36u2ely3xaA/F3mibP7O1gs5WQVeKXlPoJ4Gwro7cK8WkvaA6hMYHWYbBPHGzDemQNLT3sFrOjYXkvqj2swD2HwPvQnYftMJkHb0z4QFUH3n2gLTb5o9kNIZWVjnJW6dyfDmCRfsLCQ2x24vxnDG5NRMpDFxGIiMh6CefWRujH8rbskMweLU2my1t9%2bzU619lG3XFul2Mkym4nMk5xiONRG23n4E5/107fzjunl%2bRhkp95VbCyDFo8Sn/rVW8puN54/ZoiYcj2gV6RaTRzMF0c2I0bX1W8xiXcxxcf063XX8rpko64YHJBxk8Wgv99YixnFLF%2bP1RyOzrCX4DmYxVr0MK1r9lhHSXkvrihSskErHKya/qtzF35HegDIYtSd1CQ0TUmUfa/uz7UKskjkeUR7TTxbIshBJqwSf4G208dmjEseDGPcFtAPvfyrGOxo5%2bqlWK6E8hkYZvz6PsAwzFhAIPnVdQfvlyzHOD3Mde45ZLDHDzaiN%2bf0FvrCfiPwtm5aI8/JG9ruPQfsjuuIfm4/fsMD9e3/kH5z/rRf%2b3V9M4%2b33jQqtfMhXXxJCTcfOyqQE5HdZdRRjPAhTNE2nzid4cCPHzlPKlpPRkMRQ/jaY4MVXKXFR49djY8w9viyVHm8WCtqFOYywG06wTxeZoMRuMBM9%2bzbBN9%2bzWzm2njTgH4Y4vJnrdz5Y0RHjVomdp2KUnIXrk%2bpm6JvMfjDVAk3%2bexk8dAFCivVMOcGqjBDslCgOG%2bIKsXfceO7Nyc9UjjKn9eC/8l9%2b%2bj9/%2bf7gvTvvuvxn87s5lljhKSTC5g8TK8jUMOAurGmEZoue7m3zdF87zMgYL3pN9b3mwCeONI05mnSWEQBrKI0OPQYEFquWOjgYyFdG3ugamexDBE260IQCTE4LebPJBLSXubhWeBEWWj0WLdW5i/TCHGM4FgpuM4K5TZTOpLemSlG4MVRJCRU14P7SVMCdqpVFKUmjQ1bwpcTkNNQulVlzHCPS5NqHJnw9l4NM93M/7VD15ye65aYC80q7bqii6j6nWD1WVVIrKYlqOKnpd7mPdKlHTNcyZ1r0wRdL9EKnnjnmYukUtr4O3KWNM3W1MZWX3hZ/Oi/Eu57H7wUWc2ESI2Iss0z80s/0NXmVz5KSl0MxGVWPcImfmT0hgbunLugkHqJvwH1swF06AGU4BSAe5%2bYew8uRxPCuat7zDZ1vPRnU7RUdDFagfuNlI0NP55lNtr2%2bG6%2bjvkB41IzDfiYSFh5sUmBonVhsGs1bXXzVCaY1lx4DVi8dstOc/oyE8UaMLWQVu1%2bfKE6sU1iYrhdJG1HS7gvFEVnJWBnwaayJhZTLEA%2bKRMZBu%2bQTGNTyVZt1OneW6daLrVG2NygwPl57T64onzENvID1boGjVQP9WBM9JyPK2kqJtmUJMJ/SxhGIpsC8DWw3Cqm4vUohRZr4p3RDRsZsX/9TwOxrRKFOvpeKWBNWnxZ53Ex077IImM%2bxK4x7ZBK8QMB60k6wmM%2bw90QLT94LcONMhif2tP1knFotkDRa0obT5QzdVoqCfVkW7rQGzjAWwM5FL53Epmg2U3G3GU0jkc4IMy/6eB1txhPVf0sk0LT3kuRaUpIWo99hjsMfnXHnWXw8ZNs5%2b85kVwJxsWE8QbmfTDz1glzkfLqzWKwbnZzYXilYr9bDtY7KczEnq7PSyGTRzYUF74ShGC/wnN0eJUtaYFCScJkQn6vVY38rx9EBI%2bwRun2rpisWjwT4a%2bC%2bollFQf/2TH4nBZfaSzQbJTjMp4sSv1M28QetGPcONVn2rRdQXkMQvGsAJEkkfY3j5qeHJa7zchd0jglw40GJZ4oMg34kNrokM8arUq5/vj/HrUUL949jUFn6phvR7x32gldf%2bfT/9Dce%2b7Q/asT84/H5Gxa4s/mvfscnPjTL3vaBZHDmfbOJvoiD7UCkInuhOrNQbkEmmvIXilX4ghzcpD7dnMSNVZDJ6laOnSux6MeVMSegzvGmJ5Y4KFPRnxNcH980yUyt0uHh7VJ%2bM7yVo/8kM89Un3sGBNkE9I8McOvwycWAyW6qUWgDtLP%2bKsfP/Zd5HQb8CWQF6mqme3RuguX9noT8BgOdH7PV8npz%2besf/sZnDn7utUJnTFS9/aD8wLu/7/s/crtYIb%2bzxDwocK1IRS5DYqwZMUFVq4sWeYRW5S7DGdk%2br7EVDvw6YvW1Bu/q2JLgaEkwOxPwwW1E5xE6zDQ0wawBZXm4X6e5MObNGHQ7OCUpIrGw%2bV%2bALBuflRgXOcbuJsMs/VxdVehtK0505gooJ2dhIE60RiXO7PnSS92lUdS2GyYU8E1N9bIVoWH7HCNEt1mKXp7JsPWNLxsXLPJ7s6/ctISUfYyhZYVQ%2bsi/FnD3hGC2gYeh%2bZkwU7WT80qoCxW2iw3L%2bkRL1cwXU63gyx9QC%2b%2bTGH/PBYGwZJ4YbMf0O3N7SGHJzemHAHLGyMYjgDsPodZ/1B1Hot1MdiOkJoriO1rOSxxHTNIDglGGIgiwtW1JW7zOSYb2ViwlvbvOyPOAeYlFiwt5oJ1lqodl8Sp7zwnwD8aBgFdeIK0LWUk1khrodnOv1eCnMOsnsPwG4KbshXp48VN3X/W5Flg6Z04%2bp00loiP3l0fx1amsvoBbYmcrgiT7UbZiYJhyFymQtBEVKFjM6HWAO33YKZEbejXWjQt9KNJRK3AmDD%2bxYAk0kgirGYkABfPVola0XDWdxKQUNl4wXEdZWIJ2U93IPfB4ZNY5Drpkhp9xo4qOwL3dXTu18PPpmJE5/S2LNUmkyMxgaPFZRep8LW03RtKb/Tth4h/tQDmGvd4qevNhev6PJftS267vRSBAPjU9faeZ4NbZAmdveVnPQn2/Gy2RyuwPV%2bg0Etw8n%2bHJezGSNJMEVerpmSTLiAYZdZfJuHuNy2f0siwSxTUe5TQBFLArhSL/ncz1ve0kTO5cw4MvZ7GyaQUpY9Oan6hYc9e0M%2bGVmxRCsm7AP/uNCOOc3m0Qe2dehVRqPu1FqZEKW6sI41aG0SzGpSDAQZxJnZHWmR7SyVQNCugeQ3lMofKYIlfQzo2B1jwrsNuNxEGGkfBef52YzUCzmi6U2OroOMkRpr86RpTSntkTVyM8sT1Dk5LGZYDfRBv/xyREkpc41wbeNIjxLZ0cZ9K13eO9cY47sxI3Gihfuh8EB3R8iiNcKzK8taMWUsujArfJ6i9LfPYGveILHO410N8JkI2LG8Vn/unfXK6OP/2pX3lcXOkRXeWPzcdvaOD%2b3j//j5595d7F757F7/9ppXFMrEsjt6DEwcsr7FxRFlg4aVo/vlrimStr60XKYy5iogx2pD7tMsSVEXYwlWRSD4edp5zlZkuSVCvGyLsCAQYdIsIQRwLAA5QrlbEojACOX84xuGosvP2dya7UwQv5HIQI6XTDAXYje4yc4e2jB7iydVZOLVX8igJBGeH21j1cOjynXrfCXIcItqZAEWM7aWB2/7kf393%2b4sc%2b9St//XWrpalk5t/6icHbn/6x8n6ODBlmRYmL3UJkHmc7idlCugUkGW0motHTvWmAHkhsfhIcMVXWXTLy8wiJ%2bLJzME6kvdutGZpRCE/6ZAs0kWJJhwYD7jIxY7GWxRKXlymCliabCftu988kRR1UTWpCcG6TOwdnTgJ0FSEbv7SExKYxxA7c86l6tvNrUZYGjAqUsngp5gUyA%2bUCvCktCY11RylyHDqECKu%2bsVH60VyumVHBKBtJoN4HJSpAH19WxHU5Qf14Jo/x6qjylRFjurBaY2fBpWK1qCBctnGBWeKJcPpDU2%2bpsYpLbTbkKMK0E5hRY%2boOLnbIDTv5asHD7spJj8mpDH3LAQjcCfakchQ9vRU0ELjn89ImbTo6xRjwTWKhn1mGIA6kTxFo0KKwKyXkdQvbpr9mknZAGz4gIoLsKTvPD2SZK3/X6MsgyHE0NdcMswYlYy3usi5ROAU4k%2biU26gDfnOa8c%2b4UDiiO5IXMZKKnwWGvSYCatFPcergtQ1o0TjWaqbc8ppuXRaRttByxp3dmzp1Ji3LKDbOEXZD0bbLZ5uLqE0C1XXVxm771wro1pu0tPU7/pVA/IgMZAgcruvmYJvuQCa1J%2bvO44iTDI/vbSSgXR18%2bIX0WTpkWNIxk/PoLuPgjy5CBOd0dKQHNvfntVH3TrtOWkP6GCjjaal5TYHJdzgG/H/svWuwZelZHvas276sfT3dPd09PcOoJaQBiRkk1YACxkgIWSgWIIo7cqqUFIjEDjEiqTiO9SdJFRVwlYMFmBiCIIBthOUKCTKSSwFBRLnMVbKEZhg0jOjume4%2bfT1n36/rknre9/3W/s7uc7pnRmOMhrN%2bzPTZe6/bt771fc/7fM/7vPwtZThyT0baW60luUlZRbOCTfzeVcJ1wFLAu1sovIdw5EATE8TVmPTq7CO1TekNP1/OLc/GCAm5twKNpIHSI4eCUFl5bvVEHWtcPyNrLKBS7sG84u3hMa9Dij%2bJ04pKZ7jN5kxo3UQiuloSioZ%2bMtHVq06TrjaOdfc6wtY/RUJFKYyXQyMmA1vqGn4vrk783COmhnymHjkgLUHQPtEaCQTkLhdJ/OktSYSXTBlRZxVJBdT5XNuQXu18dfJ1gTpXfMiES4E%2bjh8tZHRHszaT94uytZ4WUiK50%2b7Q4tHAuQF2%2bqrzGOw9NyYZTrV0pWCdRzhp2naOCWfSFdIywMfzJhaLHL8bxCK/fPv5GA/kOVono/JUrq/w08NcZDNPBxEu7GeYlwFu3soR10KcLzK8Mi0ld29vluN6Hkll18tXc1y4FOHk2Vgd8ObFxdlv/tQ7PvGb/9095/ejn%2bDxN19ILfAFDdzZ0K97yz96643g7/xMXtRfLmKRoJBk0N5DlkQqo7E9Erlb9YyqFteMiYqDQiQx/Yci1a6/rIbBs0wS1QIhupnRmg2IAroJxO3v0a7qLWTALkp07z%2bEnvN7RxUluKNHuDy4jZd1T2Gl01j1a/qxh2KlAFzu3cK5/ZOaeCgjtbLZPHHLK3oSRWsM95q/fX//fe/5zEee%2b0v96Bt/9NH2W/7bD515AOfz3TVWQYEzrRzhXhfZzkiWftUWshC270RHNYG0fKQsxS/GJBfsQIbdDcF7WlenGWFTluoAIZOml2m2WDXRqE2RWLVCHmiBGRoFl4eBiOvjRajFlOzYBMvE1K7YEj%2bOmcjZDCVhk%2bfjIMqWjRp0BdDOwUm9ksvQz3dZIG4GTkEhvyEoIBtvWP9Aoqt0s0At2eaLUkDvUSyVSFPNSpLXy9%2bJz3w9kuO7a3c6/ENJvi3Qvv0bTiD0Hff7/mqlyamurLiw2Vy2tyQvBgCThQF2a0%2by%2bL7XMvfhb9jgtEl02nbeEtuFkxC3HQZqPL0Ytwfi9DFnldMqyzdAPs8ROdZVkL3uy8CIOSQ8B60CGWDl1NTYUgef9TiKEdHvu%2bMBdwYTBPS8L/YPVlQ2wEtrwj5Xbib83F68KbXDTLAG9s1Rhd2BGvAqN0BWgWKEs0xAfLWqQylIW8HyAZu8LWb7wGRAjWxbixnJCp8LFg6ZMQhwld3TPtvhu2YsejAtMDZJDJl2d63Sdn5HsEWEe7KlbOepBhj0dHdExfboJXp/rmJ618trc4w8H1/PEmsJ4gnqvceqz7b6jyfXlo5Syv05Fxn%2bjMd2Xu3SNQy4ize7B9zJwDMHkL%2blx7ucw3Tu9GOfj/ROCNqZP%2bBvdToFWaKxu7S6BbY8P6sQOzkeMTSBO7cDEhojJfzjsq%2bwSFSacnAmFbG58UaiLjTNmi4zkjWXdFkvAKyRiZ/zNw3Rxz9wI8Y8W6jUJgeePZ3hVdeXmEYt1OhMk7fVGcXYc9cPeMjpgknZen5mIEgBKPYrSZLX/A9uzaZGbT7T7u7pzmTVg%2b0otpFWDVUAO0G49UUPn1c7%2bd2U1zhkISMjOmT1me1uY0X1PtveluYlPvZcZegw8bSxxolViCs5cD/lei2t6N0MQxS5szAu0O6a3WMGnGjTklaDGQmVTMOuEpsILdHCUxajQrvbUzLtGj4EkyGKVg85XWjKECfps097ZLZDAXykDPBJJGgVJb6kU%2bLT14Gvf0WM19VzPNjm2j9wYZTjyrzEZ2WpA8GgCLB7M8frggyrOBR5THtV4FIWYLUocXka4OaVhVie1lgJfFRcbOxeeeLWkx/8B5/5nf/xGLQfMo6%2bVD/6ggfuj739Jx8dzr/qh8bl6753crtA7yxriJPdLtB9QEdCB%2bSHzxToPmij42EMlBsYuP8VatgjDC9mEgSQRRcQ729bwLtiwtzq7/Y5DulFigWoYdQfJ0WIS72beGDvlH4m57ADKX2kgFDAn4J1YYhQYhGuES7LC7IkWkuxmuBiB7/90a9%2b/eQXPvDj31J5t9%2brM7/j3b92Zlx/%2bL1vesuX/uAnnpwjLzIpMX%2bqnSsDzCTV%2bkHwXhQR4toUadyQCnTOWUbYEtO5c1JwAzZlNrwNAvjZsiH/nywaYkHIz7OARZmaaCRzZc5jsx0E/d/JDG/W5eWJGr1VTRKuAir3TSjx2QDuGml3Ae7KsHDjMci28zhiO8gEsUSda9zmgHs2K8DKpNzELtK6VGPF5Ff2kQ0Idfv67JtMpkxyvYcd5N2Auyb7WtC2/UCNNeaqB9lE10doW%2bh0/G4XvxiVk8gw6KCciNfsEl5dlOXKjwvg9yzZXBuyQBKbkRIftguZ81U9RiATJCsTaqIY7RlZNIrBk9tct%2baqVb7MDTCVCBoxckYz9lNh/EW/XYo7TE/06ib/man8RzuXAfd2rBajyDFywF1Qi2pAZG8DyeJ24bmuyLnoYDEFTnSNBWd1Zmpg29DjHcKaS/%2bSfdXag8eV8xAcbD0vV2ztjsdIENACbhcxOtQ12fK8%2bFczQX1iMhjuODEXIP770EjvkLeekhravdAqc5ZjUEbokuFjGwQQ%2b0ZKTPzEWJLhblhzMYoD7/y7bz/mvkxifU6Xwx2bTGAvzFZA96MZGFl0/p8bq6RSk07gLrIYzxDG9SJWUWWCakod/EDHmChQxzCplm3Au2oNumX5fuYm8zNiVe/diAcH3BfmYsMKrtwExG%2bBdzL1rVaJ%2bayDRnOM2SxA2iwwm3fRaIy2HoYfIunD06JiKRYLgnpaVKaYiSymgcVCAfx0uVBbSXZf/p5%2b5fRpJ6PurZJZ/n41Rsoz4cqWaO21iic3Xh%2bTWNsEoVtXeGD14JCutK1h9wuUHfLzAx9Vd2/9msQA84WYbDpoZPp/Y9x1x1KuXTzpm1wVttyNZYBhnMu4KpKYOEZmklUC9E63URVLOpFGWNNylFWeOyWGAx3pKY1xKxeUy/RSZdWjIJTE0R3S%2bJMR8rQrK7BODnSmnkthPsqybvSAfx/F2L1V4qE20O%2bh3FsDjwLBy7qBVE3ey4Gr8xJXn1lhfKYOfv/s9RyPMK8kDrEOuAKQoBgtcSuLcGUS4Na1FeZlQ/TsN2fRxf/pu8rf%2bsfv/dWPf/EDOx/9wI//jec8v9/reRx//5e/Bb7ggTt12dcG5dsu3frOX%2bQINL2%2bRPec3VbFtPu3WWJwQRn5ahOgb5/5YNt2E7DjRrKt7/cuURd/xMy9/fy90bCa9MIQVwd7ONc/YfKYEAEz2Evg5vkZTl5oG0gH9h5a4IHbdUTRCnmrRH4bFxwIWMUtTPdw8Xz/zy%2bs10MU5fipV7xytfub73/rL72Qbvjo3/jJR7/1oz/wS3/2vvnrxtRrFyVeVrSEcWfiJwfElK4JsuTI70P027mwFry3yunCTu6kFwcnBBWZk6mnfEbcWUQaQ3BHQE%2b/9xliugHF/FtBQ79Jl4ONQ8z2/QlWWjewxEJZfNMS8/hSTIlgbVZgWQ8r1xhhjMmoEbTbc1/QVlCoz2qtRe0ZvYJM7twOBzaXBdbmXFN953zbPXvIo4C7z2bWljkir1CRO16V4Okn7XmN4CQyZAelOLAn35afeThBJm/qOecajIijDN2APCtE6ty5OdDukJvTtx9l3cbzUKsuwFQYd11RIGBnPxD5j9HBgrOXBWZ1VioOxW5wGNGlCaDWmtDL7zuRSWKq5S67rylZbAFaJsEg495idUOgG2bGuGtRIVkhMZDvEjzl9d5qVwIbAvewo7aRTBrdob7UHJKq9nWcAFcJZEUiwKX9FTq9Gk4EtJ91L4OCd8px2NZcJfDBu5Oj2KWgQ3SQbpKstx6hPE%2bVyQQoxjnCzsFKyke%2b/86VhB1%2bSr9QlRM5cM7HxuvaZ8N77CnB%2bTZ43z4H7RxFz36vwUdQpz4vMu4HElEdP2HMu0iIFLepnzsVdx5LLdaQVKJ4biitnQLz/RBMYOUqTNX1bQAm%2bJ9uyb2qS95ijB3bLsGwyDH0/xIf7v4AACAASURBVD5wl%2bPbSQTgi40QK027o5aYzUpJjp3NukibI1ktZe%2bWYHjaRSMdoWbFotRvRKUz7CtOI0%2bfeSnwZJaXjXyKoNGoVl%2bOYsh5tJEVYXJB6Xyp85eMlcYc3%2bux%2bd870M475fB5f/MuBZUsCPJDFR7LVT6VhTb70idh%2bFB7qxhXCuD%2bCLhG8qiZV65SnXmMQW2FJvXs45kAcrrEOH986tmZm%2bUKJxF000GG1o5pp0R9OsPCrILc/Yjto0kU91mfwCom8zNJiqcdcj5C2koxnoVSQOzpXoDLaQ3BosSpHsoUcfBlQY52w2wvGWOvlCR6GmX5uZtBwHHg4tUcXxIUuO9kjKvjXFyGaqMVps0Eu9MAt3YVtNM5JsnLi6dW8YcebP273/ip937trz%2bfZ3X825dGC3zBA3c%2bBuqyn7z5zt/Ni9rLZWC6vkbvwQCjZwt0yZqTLX9Q/38Y467SmEN892REMVDP7z0nmurx%2b1TE9vqfOcrw3DKZ2PfKRsi0WFleuV3FdqoM0GlTCEg/N50iFwQOs/ICKaD5JL34QG9%2bYbH6LLJy%2bNT9527tzq9f2o3q4bUHznVufOj93/%2biRN9v/rt/%2buOv7z38HU%2b/fH0uu7rCEiVOpyWWhS4rkvFlwlSWqTxmYwt58OXgfcvAJRO0%2by4QDXuMloKqWoBFsZHPzFYpOnWtXCsVbgstU039OoE%2bwU1sGoHD2GyRgZDIMyDKZmQVzursdEOxqMcVlOETzsi4m6uMrHgYM8WjicuMnYxFhESaxJUAYXfUO/25hHDCuC81D4BJrUxiFRtKeqezVzhHFuIpVoG1KpO8dpUkHZSvHGhtammZX2DIiuCBE44joV2infPgdrIdMuDjZSnJqIYUvMaCVLYVbby5arhJ38lsDh0OGUAtqOfXVqGTCwMR3fQCt20JFexrPsqQ/uqUiEwK9AhKN11Hg6maRlCU3JDVZzIqk00jiYqoi88xmNp50hj9UqEzLSB7oTqcSCEnrgKkMdr8fhu0cweyzvwtQeHWiLnTUm90ym2oiedGlpzHpb/9HvttUaJvifL8nsdywS3ZfWUPlWV0dpZEz2TUe1LhWUo73lE0qQKtFSkcIBznKnnxde285nGBnMmothIg/5hZguq0RNkKxcpR7DWtocdOpuM6j7X/vjpp3gHM%2bTNKZKhvl2d7aKfwPuQPGFTRO7IVCsZ1DCZvucuiUBK46cFcUMU/5TVkYrU7nAPZDDy69GqPUJclNN0ok2HV1UFg4J%2bVKVOV2EzpJnTYtdq7xK8YAHNz75V7j/gZ/%2b0%2bF708P0uBOR1u%2bH%2bzqHQMPa9apTah/Z9/d5Gmo%2br9OhBdy80WAubJurOY04zAXXTuOojpvEHrXZXB3E0edWC8FNY9xnJN3/kUKR1anodzjlulo/yOjifdhMRGjNE6u8MKVgahcYSwm0vCu4v%2bKLGhJE/yZSIGySwqpUmhDuBT7tNpZxgzybNZyHfdJJDjsM9ybMqyAikdauS5sbKo6sh0jHHtBJzqxLgyWOG%2bViRyGko36Roz3I/R7en9c0zgnOZWDhrzGRZpClZq30ljOScJrC9qZJjPAnxuvsZnH0qxu1diNS/x6jMoHybD3g7wip4m2d8c5riRA58rI1waZBhnAW6xNHIS4JVFgf6JCKeyDHvzEuNGguW8wJUrK3z2dlMIEBZW6uZrPP2xP/35L37gk%2b/92AdenHn%2bXq/p8fd/%2bVrgJQHc2azn3/j//v2o%2bzU/Opkk4tM%2bukowTq91lby4Ed5P9qkexz3A96GPbYs9d78xQkEHHKvJTO17mxYSTnogLg%2bu6atlAbvEEot5fqFcTS/2kgsXULYwWV186qEH93dX%2b7sCzvu98Ear1cKLBdCP6pYMiL7px77vFz/%2bK3jbyXmOy%2bUSp1oZasOWDGrliQkaUQtRPEYtpB/unWylO7YMgJxYmsBk6pJVNw0v9ltJJCy5a5la0MBgSRZ4rlaSTg9ujiRMEBUQbLrsiqEhKHcFcAwMsGw67R%2b5OS37USA7C1g1rxQvcdk4GUj50lKlHbxPm1HU1nJTVdU9Y2rmXaJmYvr1A/3N/iCTrFINTXzdZnxdC1XtZ9rRu4Eix7gzMHCNSTmAnMbdkvRP9dvusdIR7UPGOYb1EJ1FgZyVVhsqI6DWlJZsbSvKxHsTizYe3mPI/H4kLqmaC6rtI22m8hgy7dM8EGtM3rfz2df9lW3ngVlHIUtiORdBeBXvTrQOQ0HNd/XQ9ZHwXAwUXEIkPxTrx5KSCxZm8rYwQD/IBGTz8sSJyFkT8md2bFZWlfsg0y62kyEcYN8G8q6R%2bXtKdng%2bWSExKYVUhTUdfmXjKKXo9eIJnqt6ESwiQDlLO8JgQn2tXhLvUxh25rNMvCVAuXb1Ua%2b07tL47GMlenbzQys6pg2m3urS2Wl32QyFcedG4F5Ocq126q80WjvvGUjf5ivuCdjdI5AgtEQ/5IpIgREB8KRAt62VK8JFgFGhIsI224Jgu2arSAbcK027jS8M8FudHJMJSRG9aPYFsvFOG8/PKKmh0xBZ%2b/FRwN1JHq2Z5GAG5gnGXY0C0UTbPRHELxYMtjYsuwP9Ava5rAeVz8gDF0J%2bC8gLMNUBhiYLs2mARlqiFjORdVPoicC92VxjKgmZuloi999Q0PtcN%2bnbUYBiusCEYiUSA42NxeJhx/FZdkli39J/HdoHZLDWQTVsbzLnOYYw98ZVKXfn6yw2vuxSU4U2ls0MzaVK38p2hmIUo9lVBx5e95qrh3Qj6jZE284H5st2RLJGk5aWVkYVBp6vWEcdd9zK%2buBWjM7JDDvNGLfGGXZa6kIn%2b9PdqADOZIz6m/jlEwnaRYkr%2b6wuXuLhsyi/rRsE1MZz9Y%2bEzvVZjsuUH95c46l2IuPu7jUm3Ad4RUbQHmMny/HJ/RLLVSBS08mtNZ683UBB0B5DPNovfvS3f/orXvPsL/yHnvufa985/t1/nBZ4yQD3x77lJx%2b90fmBX4tuZy8naKMzOwdEtVksTKduyaZHtfVho423FCu7OXPloNCKb/4AaRYTUl5dUIvunDY5GdskssiwjIoLMnnM6hdP1J%2b4wPJRi/VnnuJVnzt7e/er33Bu79/%2bf//%2bEoUjVCyc7jUMqP%2btF4VJfz5d7Q3f8a/e1Tj9msd2HnvlD65vZohuLXGq38Ew1Wqq9KRtRSm6aY7BcomWFQypzuEBK8dm6pLswUQ6DqDi72vVWXQYDbDGQrL7nVMMjytWcKsCc6SoiUZe3UqKoAQrq9Y5Q0s%2bwGbZXDTuzN2ihOGQBuD3K9Mf15cs2sTEJQVs%2bbzAshEhDVXTqJ67qpuNSMEzsZWJSXZcHoubWYPLv0WvTgDfiKFA3lh2svtlibAZYcYkKq5kbF0gz%2bkcasYLtWis1dRJo2LOtxlOT6sr%2bMyLUkTuQ4DBiYSXL/1W0Yf8q9TjSx%2bl/pcFdyx5zLFgAqaphdeCo9JGBOTs55zDU8apE5W%2bmDEKGPtQ8y0Jq1Xcqhp2usVopFMiam407duvn0z6ETAYGXDdeme3l%2bCP6uvVwMfgZab4qbIkdX7nZrEoCbn8DdlaViGd6FHlGAEdVXLsFzG6ZPhLTfBkMOC079K3CUoNdYs0xskBDHDQnpLJqiw2Va1CEEwbkmDyKPX8kmzb1oAVbjXBQLeAbx%2bxGdMuF0qvdasOXbUR9%2bdqjL0q%2b0Ug97ekRIArHs4NxvNn9xl1XsJzBumHPQiPcWcQ1pGkQJdT4FyFdBWiw4CurokCTEYl4Ha13OQa2KfJtC8j9JMc0xG9sXXMrUC7WUYy/91ZQ7J/%2b5V/ty%2bzaitvLKmip%2b0fy4UoMC/KMerGFLBbO/DOX9DxhCytMPD0uZ%2b3lW23dbHZrCMSGm7UxKfNseb0uFUFJ5tJVOferNdlXGpgimnRPhK4b9s13nGvHhq4G/DncZh8OjIygGOv28QxSiwdD/YNaUc/58GlrNDpagGcyGKMTM8%2brB2sXy3jF1el5pFIXyjH6a5iTSbtZGgy7ytTQE2df5CozSM3CWaYn9WKcHMiXmw4SdBuxZP4vSSkd0sMjHF39yIORTmrOMe4MSOIZwAb4EQ2wQptXGvn%2bOM4wY1BiYfqJVpd0mxx8IamJqCOMmC95JgAXFsCu1fWeLyVYHg9QxoHUhPiqzrAgvk%2b%2b2uwCvefzGLMr89xbR5hnjdQT4DltMSDz8affvt37v3yB37u//7FY6b9qFH9r87nLxngzkd2/o0f%2b/vz/DVvQ3LqzcI8hc6PzKMa/WdLe0grwiQfb81C%2bifBmiUpUouYA7uvnuD0k120zCddZhabiRfhUuyRl3MmiQZYrUYX%2bf0oO4MH2396Ie1%2bCYa3P/YUwgQPntvfnVx/ZlcGmHp07T8mQD%2bqyz/2Lf/80QDB6x/9inf%2bSJ5k566XKzxY1KRNho2JOI7UoxbWWYk4maEes6CF3JEMmrQDG5Od8oCjc53xHTBULgMMzMO8wwwcylOKBZq0iXF%2byMIg6tWulylSzJA7v/SgQL5MEYgHvAJj8wESLTvJLh8Tb/h%2bdXVZ1jWZjUoVN3ER1EwLdV5ITSSbcwnewEzMyZmAY55LYqqTvIRmJen6FYGs5UIKUG4scywasf6/Flb/P8y33WnaeSzxVDffY/fM2FK0eaTFms/%2b3XUYc9StA3dMUvSCUKvpos9ty52E5yNw5%2bRNvM3qtXSC4RY2QrFaS6lLmuQC3HUGtT5gunf3DANJ5qU8ZmMWTv26uMgcgsJdEELg3vMclLbvVXZ1UpDtL4XFDkXaQubceZ1rqGjst7C8uiOlNXSV0dFAf9R335nEhYBTLCTHXtKqgWKRNnnAXUCIse5yTAKRdiABQZe2iG6ph8WN6IzDjaw4N/7N6ka20jEsI/RSlQ7IxnuTala2OdQz3RrcGAQw6rLjjPmmFAW6RYFVI5SgfGiBLrsGNwHtJufZbtIX/Lcx5ZQgtFqsQu2SjDUBkc%2bD98acmh4HVsfs2jW5BFa3IsXrENa5l2NOu5gjZjgB7k1g5Y1N292NwWqf9RHM9nRboiYrG3fcuD0Iq6Lpvj6QgOwqnRJse9aTlM%2bwbzSbHFACq9RqifjeeejcxSRVthk3%2bT9XM9Mc2WSJgCzHFuPuwLZIUp5rdHvEQ%2bX4zboc3FyNB%2bHJGAQvtU0ccOdlsAcfqH7qgP4sRtDJhH3W0b4q/KqrdVXSqSanciMLn5Npt2uTuSQMhGkX0B7TvlmZds4vvO8TlNl57SFWwSb36vQLDG/HaPd1BcA5OfH4zekC03YL9dEEjVMMxoDGbIJp3sDqVIDH4xg3h2TIISz7K3ME59oBTjMfBcCVWY5lBjF2uLa7xhPtBMNrORoJsA5DvCzL0OtFyAZrzJoJro1KLG8vcH0eYVbUkXGVTeqpXPvwTvfK7/zZE5/%2bN5/5yL0tnV/wu3i84xdMC7ykgDt93a/eeuSHytZrvnc0qUstUcpmjtwq1o%2bD/QHqXDXVNnwQIExGAW6dn%2bPUxRRpW%2bC8uLhwCTMgVccV54u4QMJ4fAsXWfSkl3zqApNEeX4y6QTpUbt57QutQML7P/r0I7/0q/GPfs23PfSNj39yjmWZ42SaozFsC/NOnNGIWwjjKZKwgbKYooD6vXec84JZCMpEIw4IW4y7PSYF0yFqyRxJmW6AO5c8mZFmTDz98RPJRGNVRNWMc7BugMB9jsR0KjweATtlKGTUuTnsLzpzryjroS4u4jOuF8fiRMRPooFXsxCxjHSMux8IuJmlknQ71xpArCajVoJ8tsaKlVyt60nQcETBJdFbErdtMVm8Lgfc%2be/twkvbff8Ag%2b2Dd/7wsOV1ArtxgcID9s5GUtqWBhacmVyjGmva6QSVnMa/BjLuBYtVmed%2bj%2b9NLUKxyMRp5sC2BTAcBhWZSHezPL8t1ZBjePs6HTvvrypUZCyeb/voOgd/LyCBjLtIUTbVPeUSZ4XIbnbapbjKcDWDgc62jeQoiBEY4KeGvmsae6IzymX6hkIHLOJich5xjnGNwI7rOpVYW2oHDkXLohIXXkev5QF3H6lW0ScQWlVSHpsA1LWlyBMYrFjybzcvsGpGUq2WRc94uB6BxggYt9QO0gXEL9osx76dRmjRecj6ZDAHxk3Vt9sTEEQ4Z6VNasZ53TNgZAEUJTNVUi8lNUxGZc0EY4VdV3do0DHu4ihjRX4I0J0DC4NSt7FGhNskZ4YH8ysRH6hz4F4ifZGZbyIytUPAMhljuju6TboWdfGH2EtWPzLQTzlIPUmRFFOEzUSqn9KfnfOW/yK7nAF2BQb2XLE7ygXJf553zJreB/zndsI675ognm3OlThhsqXgMG0sMx0LTBlEaQ03XgtRfW8Ziwe7A%2b6dZSS/3WV%2bT4sSuRLdZYJhvJLVO3cpxSRCwXkoiFCr5SgFtG%2bKCfCeWQmVssfrwxynOwqoJR%2brn2N/L0ana35ulNKRce%2bbxl9mEy14yI7FxNb7WzGycYan%2bwFuNmJc3SsFmHOl%2bI1d4FUPxeWplZRjwa1hjj1KtAD83liTUfdv5giTEFkY4PxyjZ5cD3OLCuTrElcuL3BtGeHG9brMj2yQE7fHn778B%2b//e6949Zf%2b8Yfe/9yd4V60d/P4QH8pW%2bAlBdzZwq97%2bz95a1n7ge8ZLtffK8UYwgLDK2vsPGC36t76MJSqqLR4ZGKPI4SFACpCdFj5w0lhZGBWcdwqydEKCszn5YX1onWxV/vkhSwfPEX9RD/6xCfzenjt9F%2bQBv0vskfRZab9df/lh17XSs7PFxlu7U1wttfBuDkRxoHyjmbcQpRMURPW3ZYqTezsszzbwJ0D/E4CDEwvzufRqM0RFikWuc16AUF5U55DVM3GijoolUm5jG7VY/lhzYAkSVfHsh8F2F07Hmm/6Lmy8HhqNMBBt0BYlgJeCYCcxKYCwF6XI1AQKXGVIRsKcHdFnnyg70%2ba7t8EC%2bL44pInq3783HuBsMlrW8xPtHos5TJKM3vsrsMZgg8DdZOpKToRADQrMGN%2bgTHK2bxAwOTOVS4WggxEuBLhywxkzYJYhkGQfUF/dtdW1LVHUkkKyIxt3x6cuNuAYHiSYYfAnZNhEaOPDQPH30hSK11jGMiwQupkU/BKqoiKswb/G4i8hZEnrSUd5Ol2gJICb5n0ZRTw7iVAMMs1ebaMEES2Hxn3ssB%2bEWqlUj08gpm6gRwIiqwIlLDn9hypJSfTrupu3ZfFiA4AvjRCOM4waNXQn6608iktMW2gIoBZMNnVAL7kANiz5KoXMV2nLNHuRBiOcrSSCDcyWt1pPkHO9hDgHgpwl%2bMWkKV%2bAfAhHWe0nNww14I4L8pGnTFZykmmSbKUJRGQm6KKrDoBPEFoBUst4JCg1UC7gHe%2bJ/0C873QZGCaRNju5piMXbEx83SnbIUBQqTNbClJlRWquzc/nrTuIHUa%2bAicxSfBm0JAThymX7f2Owy0y7F960lLCKXbzAEvfr%2bBC9pCsojTQhMyk7XICKNGA/lshrCpeUYuR8INEZWnOqslWxIo77Wywt0KKhzY76xjjBIF1CQE3GqoJoYqw87jcePKqnRzJbsrcO1WyEiScA6Q%2bXXzesi/%2b6zObEEiQTvZde7HjBSeq02f9iRDLy6w7nYQDCgdAoqdDlr7EyFkmo0CZdLEfe0QN0b67vM%2bdlpMDtcTuv6sbaTVYgnch/sRun0rYGU5UfztiU4N8%2bsjdE92kU5HmOc1/EYQ4lo7UdcYBpEpyq9rBMHDJ9Urn3PBzUWOa9SwX1ljfDLB45dy3GRGdxLi9cjRvi9Cf51jUI%2bl5sdib4HLyzp2BzHWs1Kqv59uRNj79IUPjy595B984phlf1GGmZfSQV5ywJ0P5y3vfN%2bZx6989wearZNvduBdiHfLoGEkrWR6KEljqj/X2ckNduvF%2bkK2XFwMgxyd2sULi/XNp86d3d%2bd3by8G7SSlyQ4v1fHfsO3/qt3fcN7v/0Xn/lYhmtYipvMmTSXzHyy7rUkxWLJJW2WmrZB2pZQ/WMfxrhL0t5UdcZ8Eus8RCcJEMRMVg2lMiqDMB63VqbynJL6rEpClc/EaUQpNreiTpa%2bFU7FaYN9gEu8jogkbvQLNR3FuDvwQ2VBY11I0SBWXGUXipvKmDslA11meAOuH2UmIeHvOBlRCy4sDsEtGXzac3v6HR%2b0i1Z8WWBMuQnVHWTbeWyy/laG3SEZcbYw94sqSDIHGgcEpey7gfSCWojDGHYDegTrvGBJXCVQq4VaIMXkC/OMWnUWUKIkKRTLTWmEpky3kk9Q%2bX87TTufTytBJnp2N4OXmjLqjUS87z4rrG7UM1X3ESBA%2b0NiI/6OINsHCuZvTlZRPNkJ3N1m90trR56viwLDIJLKqSNeBf3WBXr5OvNNAMLCR8PQitkYcNxBLsmqvFe2FJ%2bN68MCvHlfYgukEaxLTlUZiCa7Ub9MmY2WxwGGdn3Umxek81n8yTnwELxblVF9rkRPfAG1AaWQUhiB11WmEWr00WeimyW/UrJDJc1wVKLHVRH2Q64gsMEobeOxLWmUCcpk2Hny5Vi7S2wJsi8aaLeXlUFLb1Zgn2zzpEDHgg4%2b5i6BPD%2bnvr2pYNuBYSeV4WEcWLOhXH5bmwJNekxyxWuyKXLkAD9fPXlfZNmhQNjVfqAreFqMjO%2boyMJMvy0g0Bhlkc8cqMdgUc72YHqXQFv06c4J6giLVzmcFF3T58NAepK3VM9Oly%2bJ9LTf0sGryr3yBxR7/0Wbbu%2bfsPBetVORi7DNvZUAMuk8DJl0aWfvXmhtyL4gbW/ndoWMpY3XWqjNOVvxvCyYNG6o9MUFD7NZjJROMsKux5jUVbriJD6SSJoVaIprjDY%2bL6NZZzSj1c2zXMG32062VLZ3YDHd5DOdHtsxwHgQodPPVWJI9zK60PDUAZBOFzjTAv64rCHrRLiaJri2XyJblSKhenNPWfbzCYJrQ2A0zpElwKeyCDefWuBTtEhOBK8jTyK8olhjEUTYWedYrjJcRoJnd3PsDhLk4wINzhEhcOoKPl1/VfTx0R/%2b/P96rGfffpGO/5Zh/6XaDI%2b85R%2b9NYi%2b%2b3tuFztv5sCybgYvL8c68gTtJZIFNejUOI4v8v/92vUL0/VVk7UoQK%2b3kmtIuE7MIgqNGzKQt07jr%2bqS1Tve%2bbNnrp/8vp/7slbw%2brK/Pne5mON8kWI/nSBbAqc7TSnOFCZzNMOaJMN1agc9wWWe9qQyQvaQOLQiTWabLr9peTp3envLvpKoqTMH9eyrYIY6fd5rM5sENvQRoZKrdNqU4kj63bZDBt8CVledlinazcVmoOdcyIpCot1m9U%2bbuPw3xz7zSSsCfIJxuUr3hvk0k5s1jwDO7j6FYXcv6GgjV2HbELhHcyAXpwpdXmfhGakCaRfDycwtxct3zj3DXdMWy%2b6PBXIIK5bk7k3YOkt0lSCEFU7TCPSudxM3kwkEXE/Nk92OQ8adsJisb5NSIzvojHYJC0raDo5ER8AffRaWoOoKEPmuEa4/VXGBBISBSlEcGJwqE6/nCEDXGPmeybX81Ao7YcwHqfcjri9hgG4oYT%2bG8gwDcbuhXEWzIxSISAEju1f52OmfBDiRsS8wiTRvgv29TecU0cVaX6MenW3fChEa676PGDtcWWCnYsKG2/i9s4Exq0lJtrWfcBWA903gLqv%2b/DmDYyL2ll5DNFOw3y9zkazIypUxt1XBJSfhukuffcFzidGwlCvyntu8/hYQzAMMixxdVr/k0G3ROPvKPlfpRJevWY76t6c5r5aq6CCjjVFnEJMCkpxq8ncGBrzjkNqMqboVjRikxubuY4B%2bLvUFNnd4r1oKB9rCFURrarK3Syh3vxEcauz7xu/9ztYkQK/XmiLrrCcb20YHbmnHSHBdAWtrD3fZZLWdlEXGQSNVCL7ZQgxOZEWNbWDgXoLfQ5ys3HvmGHzuxK7RmscoO9pP%2bRsnkanebxnrI7F7zK8HKO9joaUIgxqZ/UBkM6JnN%2bab84dY4FqOU7MMkPaala5f37lcPNtPtSNcG%2bU4w4qoKHF1kOFMV00GHJOiK%2bpAq1divKegfbgXo72ToTaaY5o2JRmVuyxnOfajDBdXMernEjx9q8DZOvDwqRivLDK0T8flqTWCfSleBlyZA4t6hD%2b4lmMxJsuuq1n3n4lxLs/QWecowlBA%2b%2b5%2bjif2YuztxrK6P5wEOHkiQPPSsx8%2bf9/TP/3M5575w2PQ/oJHlJf8ji9Z4P7O9/zamd/99In/Ig7Sh/fD1788IzDsBuf5RKej8mLcZBGVT10Ikjry7NZTZ87e3p1ff2Z3kyT6Vxeg363Xf9vf%2b53/4fw3//Wv3388f9uN4QJnizrGzSlYZe6%2bVlMq1kWxk8vo5OcmKmdTyIG0RQbNBndqHTnIy2cGDDhQk8li6ekFFhv21hxmOLKTTV8SuJeakLotJOU8L3O2ebaT%2bVkvG0ic1MZudL1qoJUuMMvMktFZdZIpmSsLS%2bB%2bFEN9APBy/nfA/QWCnLt5tTtWt94kU6oJdgvzi3buFXbLmkxlTLwD7u67O55xhXQ3wYk/OLiJmmS5WyBg%2b3K6ba8LdTclHheje5WTzOoRIisQUzVFCKSrUh1B6HtvhPE2cL9bHxQsFcUoRtnRCaoSPQQInQ68pBRFVz24skMXF4kpyDYHqjEneJaNwNkQq5MGTVgUiisQjhU/ANxZQGfTbtynqyGA4Er1%2bTSdx7SUex6FgawAieyAy/kSRKm%2bnY4ptCuU/A2CAkSVHl6ASnWdhmTNfcZuWYIMOu/w26IIcQIZhtBr5PkkqOCB7Dgi%2b2GblDmyNEDD2PlF04IQK0Dnk7cvxsx4IDgTnbtJI3jwBTAs1BWsS9cQVsOsbfTthNutYg97jROoe1V177hGxmudAlNLVPW7eSWNoX84Axl7/JS/%2bVaj/J0DqCL3ILt7t1oKG0Jbde5mA9lsBncCdwP1FWA/wkNd/dKpa29q8Tth2s3O4XhizAAAIABJREFU0HJf3DORFSmC%2bK3CafL5XMG9vwDgEkcdyy7jseUyOFnMFnGv8jmSB2blKIGA4WMB%2blwti9Sqt9LUM1i6CYRnS4xmIc5GIfZiZd57ixijei5uP%2by3BPD8rkPzgzBGSTZdSJ8CKSugOu9hV9uCSah8jwDRs5/pqYWpA%2b0OsPN7lfOEaPf0/RE23wIFCWRL4CyD%2bPEav40I17qx%2bKiTPX/ZiRgPIxe3l5MxUG9GYvUorjFX11jcl%2bCzl3PcGJaoJcCZUzHuX%2bdoZTnKKMBiUSBbF/jMMMSNYQ3FrMR4UiKOpf7DxQsf/r2f/orXXPmFD73/L95B7sV4p4%2bP8RfTAi9Z4O433zve/bNnrlwdn86XxVl%2b/mIXKvqLeVR/Oc5Cb/f0K9/93j9qle/4hv3s/M1yhfuzmgD25hlWpguw5KDezrR6qvUwsTn0ll8FyLnZwP1mC%2bhq2e81oqLhuEgsillljcjl7H6QY83kxup4Chy5OekL/72uaPZNl/dPR3tJyj7G0waiuhaC4kbGvpq0ZNS/%2b3NgRdakHYlfOS0e76T3N/v7QY1cL/chg01lxSFL5rwOscZzpd8NuHNfAvMhtfhc4mXFVKvu6M5GYN23gjZ3yBzYJCITUG5OwB0revoARAlnBJMCzxYhTlJywcBKhJ0GSgtgIskFtGsj464MNuU%2b1C5z31kzRjbPRSNLCclolIkd3xbhftdGJpAajlUm45Lgqqcq6HVjlcgDMZnTy9MUjf4oMLAtkYzaw1Emwuc7EpBbbhJZZ6VISVQWo7UsXQqpSBQ0tBO9PP%2bShFHnO29scnVDFjkNyKAX1HRr0ulAMlwVPMtn3Cg94jP1bCEHs1BA/GGrORLQMGiiDIh%2b8HbSQcFrLkSDX1K2Y/ZGlYSA5yBwSSO0gwIj2TEQrbyA1A417we11xZ3vaBBycnY%2blGMUa4aamGNo2BTcZl56IvAEn/pT7p59xy7Lu18FONedfxKBaksuyWV0w%2beAZIojSgB4g1x9YLZj2apdAfIZ1enhIZ2tgfkMQebgfvR5Ym6cB3n%2bF9P%2b%2b51dpHJuN/RGnIKNCzhVmUkfI4qqarXUtTKGQo2VqOJbK0VOZ2HumPLReZG8GuONf4wK8Hb1lOTV8bTq%2btZj2ba/RUD3qd79yi7kQRVOz7/Zi00t4lDL8H8lONCIRVQae0obVSGGMUZIiuuxyCCj5YyzAZduBo5ptMAo04bZ%2bdDlBbpODZenGNcx9paeRFNOwNkk8fI6fyCiMbCn27G0s2WkxVuBAWeOJviJqUx6xInCNp3YrytkaPfZx0KrvjmuDgHliFwg64xnRqmNzJc3ydjAjySF6gxgAgD1KdLTOp1zG4v8Cf7MW5epUw3lAC7Mc3QmE8%2bvbjx%2bz/2O7/8zS%2bo0vkLehGPd/qCbYG/EsD9C/bp/CW98Mfe/jOPBkn79ef/5jt/cTlYYJ6vca5oouyOsVqHaEZNdJqZ%2bNJOFgpC8jwXQCl4xEAl8wv8RKbDbld9eEMBenMsxTVG6ovSXrC%2bQE4BbzUz8HAhItYxF7tIMulzwSnlqomEa%2bSeOsz5rYvbjDFHXJp1gIfLr%2bIK4/m2B/di3iVuUHkFdfAxCzYdsrkVBZfc5S5r23LOx338N6f/ainc3DPqBPCpgneHI1ninUCbhWJKw4Hcl26BAlL8jRKOaYGRWDOW6FCHbx6A1L/SVcRdh%2bBOf/9JgUlDKwNya8XaekzSotd9lMZImWxK8DnNMW9EyM36sWfOhk6CcICB9a%2bPBZcsqJCPJwWGZShsOx%2bdVNhk7MBrIHPqj2pVFS1%2blyNsRxgyuLJggffVR4HbBIFk9cx%2bcTQhXFIwzuMRrBjmtisrhcUmA2/OctUVi7WiiQ64P/XzrqMzOVQ2F6y6dSJrUwFrrgP6NL6w44VaJB28EA16bD9xhwlCqQwrGz%2b34MAx7HwhGCj0%2bRsXIFpQ6p6BSGUk%2bZWuHaGAopirFHZtzs/9%2bbLwEngGEcalBjkuAHDAvQroG0CwCjDIcvTY%2bASF1HZL5wKClvrM8xjmI1C1/2HAlF8ysA3G%2boxd4SZZgTG5jADSSYGorUGdgO/EwjILWqf1EC0/SfzQt7t6Db1vrWW99uY7w2slBp1OrUgX9zBtN59Bs97Qoj%2bCBZ0cUO0xO526AGCOj4EVquLu26/3c3lGfAf5rvPGxZnK6z7uJqStPOtGl5BaUe32TlFmQ0AqbPyUshjVkFO7Tm27BERWSZiSFlo8Fm36sdOBxkwNaCkbh8gzoEbHmVijmYArZwb2nSxNtOxcJdm%2bUVvN6O3k2L%2btDjKVc4yNo7mJ3B4s6IHfwF6Q4ak8xqVuDcmqxOmkRLON8uEyCF79skhcY1xBpatz4FKM8uIeguF%2bjpuDUsYV1EI8UmRIdyK0VgXWWYYr%2bzk%2bczPGsqgjn5SYzEqc3AmQ3x9f/JJB%2baHPfOx/f/%2bx1eMRL9Pxx3e0wDFwP%2b4UL6gFyLzj7Lt/7pE3l9%2b4/4SUq0O%2bYmnJKepBijCaoR42MFku0K4z6YjVVguxh5x45cOFhb9HQlZWhujUAsy5fj7JUWtrKesNMnH/jDQ51SWHlgFqUYBVXmJ9CHA/cOM%2bSDJmWwpFxSqXkdmQq%2bmNg6XnD3ujuKwqk4xvCL/1Q11NOLzp3QTkGPa%2bux7/jgt1xpBrss89wknkDmuCeTaHZ5lUkI3n8rVjph2IDCLxKh/VY3QXGYo0FMZ1mIQK3El6GjNYXykbzwRULosLwU1btJWCf0oNAiZ%2br3R5WwhHOqZMMwTtWJK4uBMvywftXRZjOSwh1Rh2XirButsE9MyoqmC4RsBq3whDbf821lofiNkgyspDULUbfWFUgU/2Up1muJLgCvxwV8pVFGiqDtptTBut2HUDTQL67Og7WFcVW13iKpN5JZp8rhmeBsobYYSFTysaUCJ73yfC8cG9v1LkjHzsvWDwEkxz7FPXXiirXpUJtizrIg3EtGY9BRapSjKcn/uAbh2m/nFYaTkB6n4i8CFdW0A7ER3bJ2Negwa4PEYvjHErW6NrHWKUaaJuhxIlgrKGVqt0G5UvLmmVD05WOkzN1vOSw3kMAfyepl2CX4%2bVdc/TdR/msMbOZYjSoTqw5%2bojOUvWI1beDgSfvmuMt3rFMY%2b/c0WZXLDibCC1poUmoVanYWDabCKfzfV9atTRinPkkwRBvI9R2UOXloheu0ubLCP06gc/P2zUcaCc320XT%2bJnMlww9ibDbg3mdPkE8NzE3pHPsqFjw5SkDZNRGwq2fRtRPkq6xYgnuwUq9GOvNsaUZYl1UR5aBVXe1RK4rx3jymCF%2b0TXbpv9Q14bK7AkKwhdXbmQ93k/RqefoTFZ4BTlhkUTvwHgWjdBY11iuS5xXwK88mSMN9RznEgjWcG9PFFv9guIcHWa47PP5tgfcuUjRF4DvjzP0dyJ5V7DyQqjOMF8sMKf7IW4fTVGizlA1GyynS7tffi977750z/8vt871rMf1imPPzuyBY6B%2b3HneMEt8Ibv%2bJV3velt3/UjeyOcW6/WKLISZXeKNOwgjKaohQ1PwiLcUCX1dYMsB1Iy8c4y7w7ShKvCtbUkH9XCFIvxGI12C4VXY9tNvEwbjOKFTC7i506G3WXpyZR2sLs7oJuRmccMQRqinBVY1EOVJVv10/p6IztYJCFakbI7/lJ61YiuwBDPRnbeuyH/CirgPmFFTPPodsV1iJhsoqOzIPdjmXphCX2wZ9UHM5s4qXnnxgQ8ghwW%2baUcwO3Dz/hb510t9DvRMv9vQF7Z21KBu/x7cwuuvQiC6OYRMZnPEj7JsLe47m1NTHDXZ9Bjx3DtI8c0EEWM6Cf8HcW4O9BAz3R6qx9g1qzyKZcByDJXjLWvA%2bcBPLTtYhaCd/57B4W4DrlNWHwD8vKZ3TiBCwE5wTtv0/%2bd32/d8V0Sq%2bt1Lxi4u2vw%2b4lIWZhQokFFP89F6iJ3McsP9hO7fUlwpc%2b1vQncj1ITgnRpe0pFzG1IysYzJ4TA3con8G8GM4NhgVYYIr5LAayjBhXV3ZfoxTHGBflO3SRINbkM/56Ihpne%2bIHKGui0Q/Bu1y7AnUGpXduEyy2THG0CfV/Dnaune8NkMQMCJs91avs65fjsU1MrAEWgxdfDfNvlmg6ppeAeEYNsvhsSkGz5tMujmW2kMPybQxQDbBdJsA34GvUSy0Ow95Hfh2kT6%2bkcYaMhenepFs3vywBBcRg4jxAshyjrB%2b/YSWoOu3cXSd3Rn42Rd3p1h7HF5UqkcerFzuukLp1JqYZP9fna7wRw28GZJyB6e0s%2bbcYmdylK7Hdb6AzHaHdZD8Sx8MB93RjXhxnu68TYHa1xikW7/LwA52ZmK0hSYIkgvZsrWO9p/3dDQiOPcD2gtWqMf5vHwrKfqbEKL8pXcwgPA9x3Jiob4zxgbPwEE3lvrvHn3QRPPkNveODy7VKKAL4mz9BgMiyJjEUpZMZoGWE5y/DU04FKY9hvEePBJT78J09%2b8IOdpPjoxz5wrGc/arw4/vzwFjgG7sc94wW3AFn3%2bLXf93OvSPD66To7J6z7OkDRmaIVqae7DMoiZ06qAdZVVCXzzgHUJQbR7cJRRn6SarcWyqROLQQTVRslAwIdzGnER3/hnYazAoswLxaSsBrVZpguw0oT726UQ7dULK1HUiXV36zWkkhkqFdfUT5CJxT7He0ceSNVMaZlIbp0soIqdQ6qgk2%2brIZXywnfWcpJm3AZnsDdyTmEqiV6UVZfGEqb6Ai4%2bbeogHwQWqhkgFMzExqdbMYBCfm9h464KzGQlHkX4J4oXW7HlP%2b5qMVm2GoSt%2bqbwpxJ5U31ASWTPmvEAmbTZSZstQPuBwIx%2b8NJbVYJk74Or5B6B6hgsGBJpS7hzAF9ggn6sncjSwg1hlqeB9vWlaz17pHXyibYt0jDNRHZ9n0kMvlSSy7xoateSqmNsNwlCIKFmfcu1N3rnYGBauNVR2%2bAbEvuciiI2vqQWnUp2uROuhXEiQ/8VGUwIvFxCMWO43d16sNDroCRTSfYosZ5omBVQFYaCMPYY%2bKqrYLwtIzz9umVPgVqzxW4G1J0gS6vrB/GGBQHveCdjIaPZGSSiW4UYbDOhHkX1p3dlqs1U0tw9pRD3L/F4NssAN398t3hQhxBOzfxhL/LqOfAezgHRpTs2KqWgNUtrb87jEu8d4Er9%2bGQwORwfwWNxxBJG99XuvsE%2bs7y3RVJTB6gn6htVD5TCjsiYJ9RJlMiaDTQLYcY5l0p/FPMR0D9bnfETrJZixOmO4oxZlKSt%2bLl7oP3TvcZqcLsVmq85Fw%2bgN4qxrCRIbwJ4D7b8yYwaUe4n%2b%2b%2bOMTYkCJymVhdZJhCQNeZrjni2BjnyIE0CCTpN62rnXBYo8WvjetV4SltpxNM5Jb3QA0QfLZdVnBYYOl2hHZfIwb7qRUfC5DkpfSDG2WGp8sEz7ZjcRDbqSnLni5zfEUbWBfAKFJ54eWFatmfpL/7zQy39gsw4biMQ3wZMswpresGUphpdHOJeRRjtSqxez1GvR6iMc4QPdS8%2bKXz8olP/eH/88Hf/Zffdqxnv8t7ePzV0S1wDNyPe8fn1QKPvv3HHv3St/3QP1ucwWt3LlLYDJSdqZagpiNAjSxTU4Btr6NAiCCcfup0HCC7xQnCse60rRMmkxOHXRkTlKi7HBKEJ0skqGvxI9BxZiZayulCZ1gW83DMu%2bzOmZH%2bvN5dUtvulqe3b56qGG5NqVEOzKVSai4FhxRfB%2bLFHhmSz/kDOX4pn7H6J5Mvo2ZUAQhZLl7mGNNlxU6oumgF6O2agbmxXWUnVJBnU66AYNtPlvi3gg2tUeCcSBSQikSGIOOQ3xa0pVtSq27%2b6QTknVilLIwdbJ7nBEkdui4v0wooFuBSEuiLuETXq8WVhA4x0nAx2iwyNc3uOLfqre08Kp/WfcxK7q6DkVTKNL/qvBT9NbXtVN0QuIsFYhSiw8RNh1PkfCZQ98A7m8RJX04aqCGwZs9hr2KCKO9TbR4L6bNk4PkTJq6yLXY8bTulKtxYCEp7iDLzG4NHzb1wQP8w0CgMrT1j//pcdVV%2bxWtkgmylmQc99INNAapNbSsJBskyL2xlyu8GvD45FjX95uQiYHkWSp%2bh9KeGANOsQE8YxBL5GJiwkqmBV17PAX/so0YRCXz0mRPwcxWG/caXTfi7VhCTMWUcYZBRSkGfe%2b0drKg6KUot/mXs%2bCCz45Kt5vvEe3J2hFIES8Fbu63svVy7d1LXNn77kzXXZ6obg13pq26Vyr95q5Bqbwlmc9Wr80Z9e9udeoHbK01IdABfFgWNnU8p5RD22UgAuWUdu/gMekGKPOUAG4hdY7fu67qPDkW2GXbJrxExNpnx/MCql7yObJBRDHQzSTbtm9e7Y9vZRyqnGL24DZmw5YojwR6BfqzA3SWdip1mQsJD3y/pE/SjJ7i3wV9WVR24N05H5DGtGLuTNU63I7V8tIqo7qFK4GmMOwVXZNudtp26wROjMWrNFP8GwNVeDc11KYWQyP6/sQecawXiKsM87guTXAD74lZGV2j8SZrg8SfWUnAqYq5DFOHMdK1yxDgEeZ4LV3Nc3jdv9kaI8azEzqkAtby8%2bMy/fuK3%2bs1/9yuf%2bth/Q2XO8XbcAi%2boBY6B%2bwtqtuOd/Bb46u/41XctvuibHvvK8/EPLuYZZslMBj3qBDuJJpNytZMVDPtSnIlig4MTDb/nYEtLSI7i/rzIQZ7WZmTWXTltPX%2bIBeYiiznIKkVYFjM00JaJOqrPsF6QgdfsTYVXd250MiRwry312pRVD4SdF6AuFt/6t%2bjXD9F2KKhXtEt9vEyOqmioNsGTK22BcS1CO7YJ2Ft/dq0jQQyrV9rEJXIZH4V5zUjNO8vB8zBXMuAcWTyyUTb5WZ6tJOORQaLURShUSl4oXyGYTmKs55kALG5DcYUoEaYxOssM41qMNv9fj9Gi2JNAnKznJMO4weqpLK6kYvJDoQQBFeUWbBPTufMMPJ%2bLWw48mepeGQzQMtHW4blEblajIV1flAqXBFORHrmTu2dE4C6rBOoZv2HclZ32mfOaoZJVnkMTTd2mHu7cRPIBdXjx95U2MzkN/02AT5B8GGj3H2Pl0%2b7p5Blc%2bL/hMQRTiSZfgwnXlx12GrhKsia1EnDLxyHyJj2eY%2bNlQcV02Dwgnz/vhXkhxEwzsomTHGkQVomp2wGvD3aPhI52cX5wchRwdy0t/T5U4N6Jwso5ZUyLSPp9JzHGrN66qakku0pxMsprLAKgXp3AnaCxlwZYsCCOrVq5lRHHxLuEVR6nane7dj538Xzny8VokZIi03%2bIa4lprl0KBusrUBZDPbvauwaiW5eAcBXpGGOa/LRTYH%2bZoJ%2bo3juqN5BTEtNqYD1ThyteRjdsokiVPg7nQxSNntPKWCSwYdardmRMnsSY5FrEy/%2bc/24nMaZb3/FVImCXgkv2UEXfbpWtd9YRrnI1cJKjPOklyxuaEB6BqzhW8ZTFitSCcSOJaiYBqNoSAN/MMZkG6PQ0Ebequu36Zqke7Tcm9GjfgPZd2j52leSQw5ueXeQ6IpEhaC8xGsTo9TO0RwvEzSZulRl%2brZsiXRUI1qXIel59P8qvTYLgVSci6VOsGXd9nuPxZzJcGgKDswn2bmTYH5SSpxXWI5wdrtFnJBuFGF6fYVKEuDxhUb06snGOpB5pPkAM/Nm/mPz2F/X/6Y%2b8%2bnWP/PEHfvxbrh8Y447/OG6B59kCx8D9eTbY8c8Pb4Hv/59/85s%2b8gdf9bff8sbaN8oALTMvJTNNk8KUSJIZ6lGK0WKBVkJhttnaWVEmYd2PSFSV%2bcMN0Kaj3CheFUodZNHU/9192EwYLJRYs5JqukAxKxA2Q0znhP1TTNGS4kvcFIjZq0Fpg4fMygX3M2nMPTqDKwzk67jtNoRtl2qjVupezko2TyqRbtT4kqhG3bqtQHDJvwLuhVaSlHjEA3wTYthJgTwA2q1QrDrbOwUmA63wKQCqASxXxrrPC2EBKYngZThW1HmQC1ikfngJTI11LVuxlKiXxjI2VOIOspvUXRsL6pro0HwAu08WYaJkpqqu6Hbiiam7FrY/RI2JqNTvV89HiyUJQ%2bhJT/z8zeoRuZHOgB4BuYaPytK757J5/gfNWxzRTNcWbmSlbyM5kJjqngEBslQutZM7H3YHwPxnRVDvWPVtFtidk9epvytlpSAK9EVQKZWnhXY3YS4ytTjCok75ErAqGYQo4Cf85/UP8gh9Vmw1j3l6SjcSBb3TurLr1LjPzZ6wNVNwlHSAAVlSMugWyYjLTKIVVpN7JKmq5GZjBXnUayTdkcmJUYySFTKZw2H5HAxGprNyw/wyYLIohqdP/SJVfD%2bcg5UFcq7LkFknYPefjRsz%2bBuRn5Hld8XLrIiWLEu1QyEk6ApzR5w401VEgvosD9Fn4ihPYujZyPQDOfZujJNVrLSBUhjoAGkwQbnsS7ImagPIi81MYO6wHALUsMv/2ZNZiVg3fu1kMdtjkN/f9ZJMUsM/JjGCTlYFP/LtLMakkcnaklpH6rJlmxJFG7P7qwiXC%2bCBENir5RJjCwljjaNFlBjrq5adiaetRo6A5XilIqz3BjAfB8DJNBbNv61P4uYoF527bp5Mxo7dNYmMA%2bzUtHNFslEAt4IcTxcxnu0kUozr/kaJVhvll4QIHmgEONGKMJ/neHoKjLlauZfhmUmBT68jWclt1iNcHhR4%2bWwl5VCLKJCCSvFkjkuLBM/criEfrpE2QuyNA/FxP9HExSsffeK3vvw1n3jvh97//ceA/R5z5vHXz60FjoH7c2un41/dowXe8s5fPnP%2bsUf%2b80njkX9YJ6Ajy0S2tj9Gtg7RSZriyVurz2UyI%2bqg1RlHcA7XnADvBtz905O5r9cWiAtFFJTLqE0kN073TKwMsKQeHqlo3gmS%2bb3o21f6y0UttAQqZeRY8tpt5PUOMOufRw/wJ3X/MClBEoE7GWJDeVwmp41mvGCRHp19CQxiA%2bfinHIE486PqedldUZWgswJtukpn5doB3WMy2UF3OV3ZOcTSlC0KBCr/wlot0QyPpN2U8HeYlEK48jrJElfBVi8OYIkR/nOSwkCfODOgMCxrZTeuJ%2b6thBpiTHwfml0TZpl9KEn5H50kWHyrXzHz2XVQJn0O9rFbyc7mQNsEw/EOuDug5mqK3ke804Cw%2b8IfPfo5sJqpt5D5fHF5cVb1yHYJpC35pP/81iOzRe4dURk4wIM7kOGnfr19iTDvK1JeW1X6GnTccEVg3mea6Vf071LYOYx7tLduMrlFYeqrUKx46Nv9rShwN0tWORTYMagyZWan0KSU11SeZX37c0oFRA95N05ZLHqjl851n2YqSa6bbaQ7ocz2o1aoSl6wpOBl8CEUryIOQUW6Zte2%2b3HZyTJ1faBk6TJn85i1d43t4olwTBrISwCtbLk%2bNYKpRAPtfD%2bxmRY6tbndb5Ppebn2DYZx2hbguR0FKHVtYRq/wBOLlOvob2MULapAZpoZd1lH2hz%2bVJga9Xs/I5BDuUns3VeBcHbqyAHgl4L4sQvaTUEfQ9l4822czhHUTYU25XMNPeXIID69jNAqUP9xgNAqu4G6MxjFAT/LllUpDHKsmeSg1Ci01UJJbX7blSo0r7NynGHBMFsiKLeE2GYXEhgRZYOqYqqrHuIdlf1NxEtfXPgqV6A8V6Jy90E5Up92V91Ika6zvFQC6hzPuKqbg5cZTGla2usshKfzBKcagCXbuV4LC5wbQ4kdeDmPEJSC5BMFpgEMa7sJcgna6T1EFdvljh1OkJ/d/DpdXH74%2bMLH//1P/rI3z6WxhwyDhx/9MJa4Bi4v7B2O97rkBZ49O0/%2bej9D3/3P3vsPzn12j%2b/OkVtUUe5AsqdKVIy7xntvQKc6pZiE0mQ2kya6hDjyoJvTbLbp3FgIC8j83ZX0E7wzk1lMwTzWm2VjCoPzwmWW0zQziTXeoigLFW/jpaw7mEjxGieooUpgmaEfEZJDI/iqoQc/dgpi3Ge7JX%2b07FeyxyjJFL/56lOTeNEXVuKMBAbRbmvvBQw4JxkqrN5sy9BgSS3OVBq2MS9yATk5KMI3nOdf1Fry5SP2TgUeYoD%2bGTqmXhFxjqm3IQMKnMEHENGsCSVUIE5K/zZSciy7pFRt4qa1Ekrg6iVPrdtDgncOdkL0%2boVoHVe4O4%2bBRhTK6%2brzzpDC2IgSNcdZWKmzMcBd6JT39tcUIQd0Ve52Ec8LMEwldsCDA34UqrCCqMV86rUYCWtcVIWMr2SeOid5nBwdDBAUb28hpVk2EcBq8rqc%2b8EJeZjoEEmuzTQb%2bfZ6Nm1KXpBiWxSCnDnRayNPXdtKMFNGAkA5%2b8J4in54UO/I97z2orX1Ux0vyYCTDzgzmNnZN6p62WfZbL2nAnKyrCT/K3sIAP9t9vq7MwmY3g%2bg6a0UxRjQCsPk0C0w0iZd8kBDzGZ5RVw7wUxhkSRcjIFtcLYUyJDH3qznXXX4KQv/PsAcLf9q0jTNN/SDdmGUqgsEs9z1iwg1BVgbrk6LimV0pi0TTZaX5qqj8ifJaJpE2VnjukoRquj4J3Hce8xx8YufdrLHKNliG7d8nRMpF/OR0hbO5iyZLUlsDcl45zjS4gZn7/3wGXlIklEMhOtJkDWR54W6MVjDEd9RF2rlDSOgI7luswDSVKlzWM3izFJLIfDZHUyLDLYX8UY1DPxaR%2bw2imTZk3fL6QMAylj2eXflMRIo5WSdBux4pQUYQCa2RCTgOtIat14ohXL/pwjZEXPWZq6NvUCA2ljzgvdDOP9GKd6GZpr4BYyPHk2xe6glGTRnTrwxSdivCrMcTaBMOOrNXCNDkS0hNxd4/F2DdNbBW4MciFS8ijCa4JMiilNuCK1DjEbrDFbl5hldaxHOa7f5PcRoiTG%2bdYK4WzxEzd%2b/wO//qmPH%2bvZn8%2b7f/zbe7fAMXC/dxsd/%2bJ5tMAjb3ozq6EWAAAgAElEQVTfW7/2O9/zC1G9PDe6pZPusDbG6WYqrHqtNsN83lLHhcYUtahesTIV624z3TYgIljqxcDtZYhGTZl7ZdqZgqRdWQF8ABo8LjETPT2ZFBb0ZN0fmXpYiW9BV5kQxZq/VKkMXWikUioLvDSdawFBS47Y2QtaW7hJlqDXaStT82XnSqorjS6LC5T2uOqIXlvyirm8312Z3KFF95wSrW3RtO0jy/oGXCsWn0xWv8BsoC1ARjSjL/FCAYmsMtjxJN/WAJyAdE%2bmP6UUgLIUAvsOoxCdpHORBSnbKKDcT3glqZVGUnGU9nmOted%2bZO4ds87T8rt9xmfMV/BY9222mmAjIuM7yhGQVebBRC6jKIw2ldyfqwOEKZqA6RVdEumO0eTUxG%2bx7tzH2UA6tto9EjLjvMGKRfeWBlwckY2BRSdSzfSWPMt/TarTGtjg//T4Vu3XjsNLFyebIEbfgOcgiNEeZ5h0Yuw4MGoJr0I4BoUEDwL6PdtKTZKlW8ZG63wvLTkZ0Xq8AfrSzKzeOyswEZQVyioH5S9y7lIlVVSVSUEm%2b4z/p7tRakXARP1AgthAvAPw20OJJJFaY/lKCXcHAkXZZ1ox9q1Pyjk97b77Le%2bFCa1sl3GWieVkLtmeKg3zl0bc8%2bFx9iQX4cDXflysSbCUtgeBFHAKOix4ZEyzBWOij7faCgStvaiQ92aKFGkxMwNR/%2bVXideUDHyHFaeZuJljMNPr79RXKNnAZWlVWB1wt2NYcMKQmb9nMj1BPrdZVqBTSzDN9B1usU1Y1TjL0a3FmLNPbYFgymMQbJbGZM2Sy0BtA/FL%2brFvrn%2b8LgWoj2pKunDj/5iL5CQxMn4IaNdVPzUlyNQdp0aNlq6OsnGzKTtKgCBticb9dDvGtRGrbxc4xXwCALuDHPf3I5UuGtEjQF407Sqb4SjYmUwRNVNxjHkyj3G5XUO4KjFflvjS%2b1G%2bqR4EX2Q69eWSkjHgCln2qxn%2buBljeCvHyWaIa3u5kDn3jzL0%2bwHyMER9vBL5zLVFhN3LMTqtADc4zyUhLl5c4/4vquPNfy3EMx9/6ie%2b/Wuzn33P97z28e0%2bf/z3cQt8vi1wDNw/3xY83v%2bOFnjDt/7Ku974N7/rR27sZedk8F4WSE/luqxKulSy4kJkRSCDeb/DwVwPY5a98jedZ7bBu8g3CILNnNzZQrqLUBW3Mu5NJ5MxECnHJ9gzxxjVTapbYCsuMJmnCGszZMsU7cbiSNcMwYYms5xyRcGYvZYH3HlcMuz%2b9dNfnn%2bLjRsvhhVBq8IhCt7FHjKlqnmz%2bdiT1%2b8n0Tk2Uggr06M4KQALujiJjQ9g3fdShdI2Amva7PVWIa6uld2SidjsARUB6Jp5PsnQTxIM1mvJE%2bAWMKvXkiBlEnc34AIFgv9xjm6fbjt3Ptfq%2bbE20bjAOIiwQ9xi7STVgEzDI2CUp6VMhgmnvHcrHET5jIB52gm6NvHv0yuOJA409t0R6iP51v9uKEy59qN7AfdBGKM5yg536zNGffvlqWI2A1bb34uDj1XU4vl95l/afWuHRhRjYaz1gZUIO768D8w8DAosXIQnhcciTNYZuh2V5KwZzBqzmxCUs/IlWXixRQoFsMu1ezMKARXZ%2bPVEHWnadP6xn/Dv5ky/53HUwUYTDbk1JgUWruITP7CGkXfEfuMY5Z4x8wSEbRNzR0GIUZGhGyp4F4zogCclYqZ5d821/b4NQ3WUcecaTgr0eT1%2bUG2B3YE425Lsm90C06G%2bx2n7kKqexuSPueTFV4usu7mrSDXRINVrrg8RUt9eH2weLk9YpxdnCawooSlQ1FpohTGmxcEkVExjlK0MaaxB3ZzMNaN0dmoen0tyYzrIrHVJwZ5f2CowWdlKmjV/ZxUht/wKWS/kdXB/F1fb6p9zjKFjTSvWHJu0sbGALPISUf2goQCrO7GtijyXRNTrI/4/OMDcO6tSGceZH9ynLj6Q5FNKY9LRXIpU7Vv108u9BKzBsViVUkTu604EuL8BnE4jXJnloq4bl8CVyxker8cY7uU4mQJX9kopuhXGEe6frNHvhbg1DxCNl5gWAW4sAly7mmA0zJCmwJ/STS0P8I2vD/EV52tM9n36E//X//HXP/ahHzrWtG8PYMd/vygtcAzcX5RmPD6I3wLveOfPnpme/573LveDN73ifO214vTQN2ZGQJtOkxzgT7QKrIqD1UjvpncX4E4/dKxRg2d74F2A2kQuDGjQQvKgSw3lMrwCOsXQzVGAwrrADCmiZK6JowdrJ%2bkctyowqWloIHdgE1Va02PMrGS4SwTj/RH0ENATtMtSb0iZQYHSLB8VdG6SUokNnCbWVo%2blImRvQiZ0c5PbAM19c4BgZlsfovOuwKi9/bSwnExzhLTtM/mBs4Sknl2aSBAT/12iw%2bI5XHInI%2bdWInyJjDSWsfaGEXgvYmtJ4H/E6%2bLcXsRnfmZFr8iotQJZSWByKr2vK3xoKwQVWHTn5A%2bOkMnwK6c5r2Qx93h9t3XrPqa%2b23MYhjFa4%2byOQkXV8QJlRMWa0sDPdhVWp5cXjMhVo4lKkd0ig2PxZT%2buQDn2fHtkZ6PbswqWOZb0YW/rahA17dvbNC/RYoDr2FQLCnnexJ5BNmfSq%2bqGGpRCbB/E/8CBO2Ov5adMdCVwnyhL3O3qCosfTIkUpwssR/pb9ZxXkDex6qs8FPdrBVGVqjsrSzF/oaxLLCKZSMg2MKnYkIFCaxMo%2bJcuQexUpTZd2om6E3AFoaZFzbgxcZUrWyxIZhge%2b7Yq5o7Hd7nZOgy4M9ANdEzwAl2uuHXiplxrURupLoyXveyiJHhfUONeolgOERK80542L5DGAWaZsuOYxUAyQCvti2MMO01Za0vlU4L28XSNbjfS5FMu7/nLGwTmkwhhuwRJCW69VYS9RobuyggFaWwObvoyO6A%2bXVNqFogsRpqM3zEIbOiKAjttIOV1nV2M61yb1Qv24fs6Ea6NcpxsKbFzx%2bbcafIA7W6B%2bmyBLG2KrePT/RB/lMXo8EDrUsbdh8%2bh/JokCM6S8KlFyFc5PjkDrlzNxJJ4dDrB8GaGXjPEpUGOl89UElPyPmoRir054lqIZxYJrg4SBJMcg70MjRbw5Ocy9M/W8O7Xlui2Q7z9O2pX/8n/8hv/1f/5w2/79XsMK8dfH7fAC26BY%2bD%2bgpvueMe7tcBXf/e/flfywFc%2b9tceO/2DV5/JUDbnomts1hoyuQqzxqXlPERPtKCbCVsmAmHVD2Hcxfec3%2bmEtm0ryc981p3noFSm8BBsRqkMCzDR0N04wMZagY/YPh52XmLRdYE5jXo9zTv3cbaPBO7b%2bnbeA4E79e%2b%2bJIBg35cG8LpZ6ZTOHQToPO6BpDeCJZvECA64tF9tDpyXwL4VYzpsspPP7LfC3I4L9KnXnVKWEiGYFGqvJ6yu/pR5n5X3teTEadXLYa5VL6u4wLd/3ALu7rQuYXV7LhbAbg4mPPeSFQZZ/TPg6ggjmVKqd4YsutMK0Zzr33J2Mu1O2uNGs0OCFX7kdOqubY4C3dttpysU6v6yTbge9Q64Yj0L0677z1ouj5ZzI6nQiPVIQTSdY%2b4G3LnPisejoYg9n%2b2E0yoxdevCpFJvGGDVCBHMc8xZwbNDCZl6aeu7pJssZjCh2YIA6Zuy4GLg3IAeE175O27Vd37jemXu%2bSsH%2bB17TzkNQbu41lAyxMCEURvlO%2bZc06aLEtMbKLPrMLFxA9BFy12qDzn7aJOZC7RcXFGrXGI8LrDTC7WoTxCJT7jbhusCPa5sHdIJeDx6b/OrXitASfWdK6Tklgz8vu/63VYqDH3raeXa2AbugWrc85Zf2VmvjImbHeYD8QETuC93ENQGGAUddJchytoQeRmiVy8wGvUQJkMZA1vNPqbFGozIWs0eptTVdTIJeJ0nu6SMCNteCCCW97qpq47SJ/lCE7SHmoczrOl6Tn8ZY7%2beobfW9mLyaUngLu5h1M4zj4iDpzYEgw5ev9Opp3wm1EqZPVe2mCKmrt3mAXkEBOzdSKqi8oq4SnJfm8/M68iePMl12G6nREIHmv0Yy%2b4Cn8siPMulznWJM8zJaKF8ZRAEr2kAzU6E1TLHLAA%2b%2b2yGZ2dcScqw26rLnPLsfo4HZhmyKESQBIiiEOFwjr11JHPI9UWAm1dj7A%2b1EBsDw5sz4I1nC3zdqxM8%2bp/Wrr6sh9//7/%2bzn/s7H/vAsYPMUWPj8eeffwscA/fPvw2Pj3BEC7znf/v9b/rMsy//4S//ylOv3b02RTKto%2bxN0GJCqumdWSmwVpuiHm%2b07pwQlKkxcuYQEEK5ybJYogZWUd3AqSWWIpE54DRThGiUM6xrplvnMj918IscQSoKVklEjchI2uTC%2bSKbFYilaqY7fohsrsWH%2bBFLEEUNq%2bq6VYWQ%2b7eXOSZ11Ze26NvcDcULWdQFtgpgRLbmYY4L5L0IbYIGAlXqielkYfcvV%2bFNZJybYzJD0xydyAo%2beTrUqtnsJLSObBiLxu%2bCBTBmYqm5z/CmxvR078SIZvQ7D0T/yUGCzGXOCEWEu%2brVLsyxdz1O136YzseBVbkFbx%2bC9owOHCKkh8hQKhxE4M5EYk7AZNcNkDsnEwYbAtwPkcQc1iWNNH7e76sy5OoMQ/DPbdtNxj8o78kB9u375d88njDnXQZaloxabtxofKziYhDLcdTTWHd03/H26TZDArRfagC6vRGgL2rWhLY6Ugsj0T27QLRJc39nKxqEWHi%2bmsT2lJjx2iSBNfY95nUN4gAGLoDYq4QsyauWqEq2n5vIZCb6%2bAjiedlVkqsdbGRFwNz98Ddk0Fllk3KNOXIB6E2CrSbldRHCJVfk9HOC0QaTplkhVnKcrXeZdGYbuEuQNi/QZ1tIcwQYrHP0rHKrf5OuT/M9GqwLdCxhWK7Vrl8Y9zalOt5Uuw3c3XJLyRoTlMk0FLiLHIXWj0MEq55WZ2Zr1YYoFj2Enc3aVWGZ460uF/CoAYkRtjcSRNd%2bBJwUiKVM9LV3jQmW4vUfMaCIMWhk6C15bpXDlB0eL9JkX9bhkILJsV2PJvEMuy10R1MpCCbjm5VedQ5VlTBdmkaXw6hl5/cE6NfG6mF/RuRRlMjcafUoXZ9By06O6V6MWpmjngFXHwKu3wYusAr0ssS5eikVqh8%2bGeNVQY7HTke4Ps2xR8eYOVAMFLR/soxxqg7s7mVIKKe8UuLsfSXyIJLK0oPrC0zCGparHJNVA8Uox639DE9fWqN9NkG9E%2bGbT5f4%2bi9P8LfeEt788Q9e%2bOBP/dOP/Myf/87f/czzHmSOdzhugefRAsfA/Xk01vFPn38LvPpr/uFbv/wt//UvtPutc%2btlhiIrxB6y7I/RSVpiD5Y0pphOW%2bi1NZlV5jyyKGTKjnCZIeAXD27SLYZkdLlaq6k6dxk3h66KhQz6ZPKjZSEgnscX0xjbXC4jp0dxOCQodhU3Lck0TrXw0LRuGs9DQJJOpyaosCCEgYZsVmWooAd0lWCoX00MhLcdSLCk0BGZcNo7MoGNuk%2bLHcjuU3vL7zJWppXkVto11jDKVxsATHnRToH5fohhbNpdymPJQi3UGo%2bL7pynA64MEPyv6EATCAhgMqK4R9hoMarH6LLQEl1XJJDR7W4MtgPonP0lqdFwCZM9OY8zwZTn5zI7ccy8pomn3ChJCCcb4M72JXBcHaFjf/699O57KJQwyztPa33YXjTsaHQZcMVojVQm46/gOLA3RIyePMiD26FtSCbamPsDlL/tSnafAJgbj0j2/o7fbV4T%2bV0uuQAHz%2bYz7ou8rCwFa2GsKbDmgrO9oDHNC7QiLy/DlBCS%2bGoJrA64C1B2qz52/XQSasyBGklZryNVgQkZcLY7V1xYUKhLb/MIkxrf5VwSo7kW0m2FEJOVAAK8JFnW%2bhBBIQMJymnEt54nYj8/5P2Vy%2bIDp4zClpvoTFM2lFJ3YJ99ekRHI3FLCpCmdUzWSy1kRcDeLTDaD8WKNbcaEfJjocE3krh41pSP8vZcnl83oNNWiYKe7fMTAtyx7AH1PZSLvrjGoLYvbDwae8DyBNC4BSxOKD4m0OalGq5PbRmQsplgGqNordGS8q26zYoC3SSWFaBhQ/ftzEPkYqmoS2kMy1qxgXUbt0QmI0niysyTiSdXTz07yf%2bgvpVIYEE71%2bpa%2bRCjoK2seq72AjxPEBW4Pshxuqe5ME6mx7GeD4Xt9EA0xmTVwfLEAk8tI1zq1BAxWFuXOFkH3nwykHQcDk98ZIwh/nAM7O5mGJ9MpKjS3oj9hYnZQHCF%2bi%2bgTCKc2ylRDhYYr0NcmbF6cAPrQY7BfoYgifD0ny0Rn47x7acjvOGxDKd36vj2N0X4np9Y/vzj//z97/vzTxyD9hd7/D0%2b3p0tcAzcj3vFf9AWeMd7fu3M1Wcmb/vqb3jnj0znOJct1yiyAGVHLSJpU8aJkEvg/XZuxZr0ku6qdS8CNGu0fGxgf1GKjaEigk2X9i0ipRiT6S6b/z977wJlS3aWh3273o/z6se93fcxL2lGbzGaERiELAkkFAwi4LBsHImELMewMBhDnrBMnIUTO4gVWAuReCWBGMVAbK2AjfzABkkIhBIQ6IFkaYCRmJk7d2buo%2b%2b93X1edU6dU6%2bs7997n67u6TsjacYwWjoFo9vdp6rOrr13VX3/t7//%2b0MHy0UMJ5zDX%2biXqBt7qOY6sWseuEhYtcNsWe3Ii0Be%2bHap/DYoVUA/NfSiA9XQwzLlcohpHoOGk/iKL/zhpEbf6t/tFbHqJQECgTu9o7sVshGXtButkbU6Wf3%2bPL2cPA0jDNBnM5gISAMeJgnyGMFXou3VjLtl1duVKdvATmQvfNeeIkt52oQisCSrzqii60jCKzdbKZU6em4FkwYNLT6LjEMJgTtXH4x7RqMaAXl54sClL9spWvbbTejnxLg7HqJxKaD8NHmFnX0yxFxFyPSwTFMPPePpTpadMhf7L4FKW8P%2bjDeiiQNve22r6OJ4BHXqNDXAmnp4y5OfZPkpgRGPHbvKYRh3%2b/0E9txizxOt%2bUoqYwJVyT3k2LEfuEDFRFVKwE40yMrHuJ%2boKU4kA8s8YbDH5Gcz1mGjpECU3LeOgppVIvlxkyMtuSQP08udY9BUYIBoNf3a2cjFiIGfMPquSL9sO7uUfESAWjoYVxW6Hh1bWEVY3/9WGy9aeAPc00QhTmtcGWmhHuO1RIUo07m%2bZjLn5trdGeWCQNmZoa9SHFQZHDrW0AZ1EmLRmaNnk1OFYSdI30Sjakl0ndXktSneHwEFRXMWSVMXbwA9wXdviLIeYFoUUiGVCcgyavI/RxOKCcZk2idJif7MQ90rETJQMUGNTVHVv5sZY7Tt3Y0IowP9bO1txChnZmnFWm21wnmR2UBh25%2bg8hlk1GjqCmXtIDGrB7OhC8et0R1QR84gy0VnwHDGRSfL4MQxbqgSjxYerqY%2bvLrBMm9wJqQUBs0bQ6XOx/p9Qm6hDIBPXS5xZQw8VCpsJ8DNw0b06fVTjdSxoNbq3KCBGuU4LFw8MVboJMATV3zceWuGR3sx/vTyAvUc%2bMYHG3zrgy7SMMbXv9JBFQKve2fz7u%2b77/d/%2bu993%2bvXDjLP%2bBBbf/h89cAauD9fPbk%2bz217gP7uu2/4W%2b98cYwHZnl5XupodGZS4CINYlky5UOduG6j0whgt8zb7SQzsm%2bgsG%2bAd9cnQbZYebof%2bbmfYN9rBSeYwyNDEzqIFo1oaJ%2b28SVVN3BZyXSu37i0iORLr5zX8MzPp1205AH6ChNTsCTNKzSdIz2t6IXbgP4EAynveePpbIGNRBTG%2boxOCmm/0haQBsxIPEEtbiuB1batjfnaQJ/7DxNgQF092UdKxmemEqlxvbgtUDyFYRe3l9scIEWZhlpzLKBlSnvOWvrFuL2ByY42WY/yGEtS8mc68ESesYcU8wtn5U/%2b%2bdx67D6rcX8amH0WUMzzt%2bUvtwXuDLBM8SXtvw7EtBJNj8C6MO0oNYNuIrdnWqn4fK5NT06tf8%2bNhST18rZ66%2b3Ob%2bfZMf26%2bcIjGY6D3FC3Vi7DXSwjL1COzLrSDiDsmxXLnlk/fq1AC6xOvHVR7FcB7dYTvqt/l41JrylZb1bu1CsAMnkShSjjKo1mzqueiyhrpJ9X7lRShEnf2JTUUAtvt5OSHpsUba%2blIlVL60mDtS1wJ4AdLqsVcBfGXZYC9EoYn1v6GwluKaTTfdNxQpTWdsdEJrVqoKahFEjjA2hYzeRedmehlvR0TTKtnM4Rth3LDdGSs6qptm88KipQp5opp7qp43liBam5A/5cSN%2bJZM/Iocashsd2%2b54w7vKcmTgii%2bFqhl2gEYdIl88yYy3p62x1m3RqXXfstYqEMEy1H7vTpQhxFbDIOY03%2b/VhiTM9PWeK0sWmN0UeRSKTn05YEkpnL3X6DcJpLn9fLjq4FCyQex6uUM63gPiov2QXzX1QUnLj7lgTF1xteXIBlAclnpwCf9S4GI8q9CJdQKl40shiZJkRGOYuwjzHU5nCtAhRjSrsDyv4sYvPPrZA52yIr9nI8cZ7I9xzUeHlOw4qx8UT9%2bDqv/4HH/jeK4/uf%2byD73nH2kXm835grXd8Lj2wBu7PpffWx37ePfC6v/ar31Xt/uXveMUmHqiD8vw8yBG5NWIvMvLHBmWtk6YEvLeMB24H3oXU4cvHeAfzzZdPMqmoGa2832wTNVUuoLFWiJo58tBFwIJMx1hjQ6mTsZHkVSBY6JeiBe4E8pLEahgp0cKTXTfEF184qa%2b147NIvwRFPm/Ex3yxSNEXVmnki4SEVQu88%2bWbbtTIhg5WtnTtnrZvVYOSeb6BG2BYLZ8GnEX/PK2wsbKdNOCYDKKxe%2bSpJdnRuGkIHrBMPnXnn8coc4wGni6Yc9r%2bRi58JE3g6kIFbNiCTMxBnbGWklbAKiYBUEvPPha3mAKhLPlryQyB42ll3G/X1JMLAyvwZgDvMzHpAv74nZkB20ajLqydAWI8P8G4FPfUFdx1Ow0o5TkoFyFYXyX73gZR%2b3mNwthsrqQc1CCfIus4yZTzezh0DBz42bFkV8ueG0DJfa0UwerXbf%2bdBO52tSKUSLE%2bAu6GYaeftb0uNoDgm%2bNDJxjaQfI6rOa9HfhwlYXbSv8%2b08fJ9DOuMwWBvDiRKuRkveVes9WOTSVfE9Ta9ss9plyMghq0hnSog7vNROa1cQWJG%2btEWDBq%2b6dLH3QTJDS0cm11%2boqNZsEnLiipQIaMUjXOGSkE1TToqVCTEymtp5izEYop/jJZoKdSwCN73sdkUqG7PRZJTB3sA/nWinHXHXUILAdG%2b65lMnVwC2lABvuIec8kd0HLcrq%2btolkZWjmBrTHaTVfikpAPJNNeaSkNxgHMFmFNFahsXUPYp/S5r0Xrc5XmYhLBfRib5BUQymmxKcuny/bqYtr0wpnzFyxgV5Vu9j2pphFCRxVYzrWFq%2bc7yymRDVkM/LwRJjjE9sJOkWDumgwzYGX7KrmdRHUFqUxqYtlUeHJOXD1RonCAR65UeFmP8R4XIpMMrjS4HOOjxfFNbaLGRrHwXihMIWH4bURDpeb6Cc19vYrqMDFZz%2b7wKs2Gwx2gLe8NMK9dyq86pyLvHTxR5vN1Q/906d%2b45f%2b6zv/xufxiFzvsu6B560H1sD9eevK9YmerQe%2b5%2b//5rc89NRX/c3Xv7n7thuPUe/Ot2smTFUn0LKZLxS88zv5jpICRwJsXAEJlMYQvFu9u5bNaMbWQ4LIVFqVRCjb8LrBHKkUZFrpT5oGs9BDqowTzikXWSuFdFEhCzTcSRZkkl3MaO9Lv8laoePq4kFWymK/s9sqqKRZYV1k6dTNAJqhJEcaDMzLYmJfK6nz5LFtQpmAfEw5DqUydpsBNcvZt3UKBO9LzVZOKCM4UXmz/R06cPAwLEttLGGAv8k3PQLr7YNO6FYMcSmFmyaNgqJFpmFY6SRTTyskjqP9wE3RpS8EuPOryXZvoDzGvAvTSA35%2bMit5bS%2bF%2bA%2bYzKw7njiGAHonGu6doyWwRgmfVh7GDjlCuwvCEjNQHAZn3puTjx/VqFoF/cy/SfWj%2bZcbYlN3jHJrJIYrH8%2bOV3YRLrNpNMKXu/oath%2b2aSarpGvtCwUT173rNKrL228S3B6VAdBu8okFG7YRNQWaF%2bdjys5ZSX6cgHwJ0oDrxJSKZcywJ2rLATFTLyOyPKaCCZnBdFJpeVkpjonv8f2gc09FQxrAlyZ6QT%2bhqCWfU8sD9m7gZ%2b1j7OrcXR84jGsJGyBO0l8Fj/j3ydkq9Eg7fI5wbumgTePMWpydD1flyAQrYiDTt/DqMyEcberHt3NDM2yr0H6cmMV5K/6UJJUjZ69/W%2b%2bKZGG5Msk1K47IJvekz7TgSQdZkTSzqZ2KmHUZQHC9BHbxWew/GcCJjrBVLXSOvWqWnEb0nc8vpxhvnDg%2bkAn4fqCgmtqWzCPyYlSAf/bPSVOMbR4pKvP8YqqOnGffuyjQ1e82Okoo8ZT9HwFJ45Q7is8eQflLcCTPQ8BWfSiwZkEuHvg4TUxvdddzOeV%2bMU/UgJ7eyX%2bOPYxOqixP67QSwD3SiNMuxu58IasKKbgeA4OKw%2bzvNIs%2b7jBwaiCHwB/8sgSTQ58xYtKfOfXpgh6PraiEmPKaCIPeBBXP/CLT/zG9U/83o%2bumfZne/OvP3%2b%2be2AN3J/vHl2f77Y98PYf%2bs2dT37y42fvePB7funcbvd%2beXFwRbo/kQd4Qu8u0TyeLpu5XbKqMFmm/HZPwLPCArl51derRFWC9xApQkwxRRcxZlIxlf/ypcaHemOSLfPQE8tIeVHJOnCzYtxbMvoVEKc0RsxWTCXLdFljEnoCeugGwYJNwjAxiXQODGNdhVKcE%2b1dyHiBOmDbg5bNdEKM6oUwXMJGmyZVDllnRQsNOc4hMGMy7ynM7GpQyGTRWSHV%2b48olaErndG6HxMZkxwkC1/RZcMXYC4A5xQWfoWDaOtoq2VS9pm0bNEAACAASURBVDAxdn%2b0sHR19VSeg0mDAuDMxU4YxDnafpLgjTKIhCseLRbRNftrLbyDBYvJPMv9pr3NPSwr0/YWIKY%2bn/ISgps81cmit42ZKOkwoFK%2b1CRPi6ud3W7T7yvAb6QCAn5bsg57uD%2brUXQcaZO4oRgXljFDzWkpSb0cezLQNnA4TbazYssdYG519a1YlG22q1Vk0Nns3FY%2bawVUTACms0y7j8WMxbDu7CuZi9Sgp6ZKKueonc%2btA%2b2f6NfOMUnh6PFvb8YSlMfT7tPLahw6PrpNITIpvWn9Cu8jTyxBjza2p2Df0XrSlg1ufc55OYv1PKzpkMQb1t7fZj%2bav9ChSZh6kaY7oqHnGFLqk7aAuwBhYwHZITgX1E9WfalXR1SDbKrQ8X0D9vWKovRF46BMybbzIuhcM8PATbFfZdhUKWomneZMPj08/q8ca0A8E1c7Sw3%2bxaWLCaR6pcUGJlKdlUtrJuDsdIFqSbKDE5gyFSBJIvRjhTDVLjSyuHBWS9iqqkG40fKuVQrBrAIrp073aixyD0M6PlUzLAoXym3QTSt4caqfv5V2OdKJ%2bA22jXd%2bWbtI6kOgP4A/zZAnKaZjF7v%2bBEGj4IcxHpov8ckzMUIeTDv6osFOCGz0VLPpuurFboWXbbp46KACc9cpi/ktx0d2UGI4bkSnThCuqGXnAkdI0D7HATxEPnDpVoD5fiXuZSz2d2O/wp8%2bWaJeAv4ZD3/91Q4eeEWAblNhUQGzvMb2IMBGDPzS/3fl3Z/4l//2XQ9/%2bHvXDjLP8gxef/z898AauD//fbo%2b47P0wMtf/z%2b99Vv/5t/5xzdv4nwhyaoNmsJBJU4zibyAJGGVBVQ6R7Zg4kV9ikWkOKlYuQwc0bpzYofGNsKCMf3uUpgjh1cnGrC3wAUZoiVtBrjVOpFLJC725U5ZxaxGkHooZ0wQa0QyI5ZvhUZt/F4C9g4zo%2bxx9Itmhh1PS6075T0zWjHqmIDe7fSJFn/2o9VuYcBioeQ1CCCDN62WKCJgo%2bAbiez0Em6upRwsKkMZARl7fsdtNeei69CN5Y9jeVvTzYUvXd0h01kt2v8%2bARN93Uv6t%2btldhoBTuiffco4W3aTBXNYOGclJyKgMn1t5RPiZtGujmkHytXJrEeVro7OI19pijrRiebZZDwBK4cy4DjtSWc864VtZyHK26F2K5WxjHubnjXATQoZGRAvXuT83TqqzI/A7MoiseVOcqwbTfVZJre2N9HJZ4bxNzKr05I97TEi/3D0CoPIdVoguX2d7Xuj/X38O6uuMuA5uVnW/Vh3tX5hZVWRt5yIquwQWLCfRboyr/QXx4I6%2bA5lJmZVhdprXmvqIjCVeedGx5IozbjTG348riWZUrT1ZPxb%2bZH2Fuy5umjYKi6x7bU3uSSVOKhmpdaBW0k8G8ukbs5/ykxOSGV0wmWNjhuijHO4vKhaYVIv0enWmE4ZCIRYpjmccYjOwMFoqAsl9TqeCRQVxtVMJDONMO7aANZK644eJOYJQ7cZOsqkhSYOyPzT3pEtEf25QhKXmOWusOAi2TEPhKKoUeVAN41Q7JYIuj56ZYlqI8CWYxJPV0y8fq5qyczxrbvlNrNhRQdbLA8LeJ6SXITl4y4O8gaqzOC6DbwkFtAugL0Bro9K7PRc1JWDggYD/QbBdC7jEqka2aKHxcYCv5lE6JQ13AIoikbmxJsvengwriRoHS4h9o6hD/zBwyUOzngY3axwOGZyv0J4pYIfmiJKXG3xXTiTOXzfkeTTaRmiOCzQ6Ti4sleBCxR//LklogsxvuOeOV5xMcaLz7niVKOdgxr0ggDJa4Bf/KkP/8hDH/vDX3/sw//VGrQ/y7t%2b/fG/nx5YA/d/P/26Pusz9MC3fvc/3Zm/9q/96L0L9VfyCufLZYGGiapbOjGVCIovCgHu6VGyqnWZmcy4ZH3ELEsylxRl4pdq4M5N69zbNKie7pTRkHDj7p7gkkaY91SYdw1OnUjvu0p2k1M7SJaVvAiJw6UAUeiKZ0i8PEp%2bOwaA%2bPVk6SxxbwoOducauNeTGj3PQU1pwIkCLrze1PE1bpdaQ9SwszgJkHRrzFminKC9qxNT6VU9HNXodxzQFa/vBhhVCzlGi4ZbLWsBdy5z01Wjx/V0%2bqfldOLQ2pseffXQ4JBe1ivWE6CM4jSpigBGjlugq11KcUe7WVBF5rjRSYdU7FigK64iVMiQ3bZgl%2bCsA7GkFGs/AwYl9jCWhXrUv4iNgZixb7SygduexYJ8gnf2Y/sLzeAKC25dY1pAWYIQ0/cE7pS%2b8PoFTLdBUevaCNxnXc20c36RfW8Dd5HbJAQ7HvJTwLVNapbzdDz0mqd7en8RPbaSdrBSqr21nhbv8A8n2PaTixFOBWQxqwibvjGImuCdrDg31ieaRrowE0lm9qPjcWXL2E%2bK7kLvu2LfTwHu%2bg7X95AE72Z1Tg6UTHKu7OhAtZnVUhmYT6BxSFvE1rVINdPjvSZaesfHsFig54UYFwvtw54SxNMOSU8OJpQXaY4%2brR5No4elZtnH1VwAf9XJxU2G22GZYeAmqAMy75TDcJmikgJJOgo1EX6nBIc/poXsyomrkd1ncy3ZkecYi99R7uckqHdoU%2bphUFaoNwIhTjYNQSFjaeYkiXabA3F0C/PcOqk03XKb%2bWEl7pSaAAAWwwLeSGFeNyiWHg7yEjsDB6VxIbLnkdWRwsWGN0UvcjBBin1niTlXnRIPv3ugcM9ZF%2bO8wcvOookdT93jVrgzBh6fizMonrxWYrkA/rBS2I60W0wSA%2bFehT9VAV4Wl3i08nFXQFvOApO8QRQC40WIcljh5rBEN1F46LEC5y8EqGIX37Jd4p7zDQapj4gGAwwY%2bQxyHQR3uLj8mcvv/cV3vffHvvob33rjPT/%2b6nUy6hfzEFkf85x7YA3cn3MXrk/wxfQAnWZ23vC33vl1W3jb5w5KnQyVZkhY7pvvmrqSqqrUWQ46tA3TzBYrjo4McJdXkklKE528qba6soU04EGsIFe0eSPSmRXr6DjiAU0mngw8X7AWxLEgUzkr4SUu4kUlxUXk/03BTpGNMkkOSvInuY18D/1FCfE6p2%2b9aE8VOpnWka8S3wyWtoDmNHmLTrDzpekZmXXxq9PL4gTu04mjK7Wau7hNBDMhru%2bGR8C9BXqloQRHBCXmX8dKZbhfDLhLWuRpZlDOJdaBZlVBOaJZPk0yw1NLOwi%2bDcvuGyBmHUQsE00gRkAmw2jYU42wNEhbJTbaCdai1/kdAuA8T7TLLApkrQu/EBDPYxhgBHZ1gB7gsxrlCdcgymRiw%2bjS/eYkcF%2bxzK2bgeBaNp7Tgn3zNyZeZrSKbAyjTebZyFpsH9jfdR1Lbf1JIM5%2bmVP/foq9onyd6Xsm3FrmnsMluvrnuLFoE4dolfxIXXfbw92cfy5jo4M%2b7pvI/Dm%2brXIqzBwQHTwntOkjy6jbukMC3Flzy5w7CxuIWYtNfLX2k0woZxBoY2kDLGU%2bskmV7kNpkAm6%2bA/n%2bLDS1XEpb%2bPhDFat5l14gBNRCvfuOsHqz%2bPlAok5N61LnVmEsjOHP4lRpjmaqY9O18VkVKHb8zAZlej3PQzrGdQ0Qr%2bv3U%2bKmKC%2bY55TBqQTuLOvMvPwMMQCrzPpGykeQXxUyTNC0XxmpsRTnXKY8myJoO%2bhX1RoNgNJRD2jTWKE3derB7pbGISeS4CnpsC59Mhz/oqpbLsTA72zXsPnrl3F4P09H1WKQ3j9RoHsOosb1bi47aIRlkPve31UYZc%2b7YWLbrdBf5zhSjfE43BwvRfgyuUC5RLYOePg3jOquVdBXUyBM3QOWwJ/sgQqFlGaAp9RLiYHFbox4NPa8VqDx5UnbHtvn6WsgTNpjauZwhNP%2bAijRipZM/k0CF380SMLkca4PR/f91U1XnJfjE23klXUyazGsPExcCu4Wx7e8Dpcffvb3v93Pv3rf%2bkXn%2bNttD583QPPqQfWwP05dd/64OfSA695yz9868ZLvvmH/uJ/cPfbLn9Wg3eVZij5Yg61M0EQzFDVulhR4vnyQCV4nxg3CrI/aawdHSx4Z5vGCwdROQMVuqpuEHZZJ56fEP5bCKGEfefGhNW4nkkRkTxQIG6Ll42wxyHlMDbplHjXaOHlXRR7KOaVFPuQsxoNK8udSyVRw%2bhRPd0hUDUrBdSZjygVaGEBAmS%2bmIUhN5vFHrQ%2bm5QVBj1PBzECOo6KEtn9Ce7kMjOgYlIWf25JY1YnJggxmnrJ0zUyD4cFmZoaylRGFca9aTAKG3QXWo7DAIIv6b7jYVSf7iIjMhxzGcKim3bwb2KhZ1hUFlyyLJ9tKhMeV77gz4DC2x/pIkA6irF6bWq05/VxSU9b877qC7MaIZKZvtIJoxa4t9DmsQTVk%2b06qTk54WdupT%2bSIEm2OdFs%2bkkwuxKmkL3vAq6xImUHZqWjAwBTDEy80q20qgUoBbi3Ne222vxJatwQt8fuYTrB8PqjoyipfWkik5E5wYlO9luDbV3g/mizKyL8C8ehMcWb2t/V3kfvx0JPNbKiQkwf8RMPF0k8bSVJrwKClsbe3jk8VlY0miPtPaU0y8yAegva7f3X6hteScfVrLvc0iLsPw7aj5Q2egDEPUZcmiiZ0St%2byjjH6F90W6qGFVa9VR7KYZFhw6MeXNIyQRZeNQp9J5a/SRtET2dWF3iemRLrSIJzeR4amRd/H%2b/XiOljXrAIUY3mbh9h30NV1Nja9FGVDejAYnMcLs8aXIxMDGPyNi6wyiwxcGZAfA3sUP5knGbYHH6vTIFGO3UNdt1G7VWq2XFpsCjBYzGr1GevLlFcdsDg3fO5mubC5fOgqhBSN75R4ZHaxbWuBuyMY3d2XGyEwL19F18ZVQgpoXKA336yBHPW5wvg8IxOPj3MKnSuVbjMaqeei3vSBt44w2ETCJCfLhocLkIsae94UGlnmcDBQ5eWKBfUsof42u0c//FfcHFxJ8BopDCcs8qqJ7kanuMg7Sh89dfh6k/83Yd%2b5p%2b98yv%2b5%2bfyzlsfu%2b6B56MH1sD9%2bejF9Tm%2b6B541Zt%2b6q1br/qmb3nTN7ziBx//bCEvycYw7/Qs1p7u2smBLNAmE6haiKsm2K4TJLFmjLRZgq7C1w30S0XAObOXWA4VNQKhmRUCzHQVQh7Dk0YGjfFdrKhb1xQUCzLJC1zO3aCzqDEPPQ2vmVA3JxuvZR/jwNVVRVkF1b7rjZUxQSNLrtMznT%2b3cZO89F29Dj%2biJIbxRDvxkUA4VxiXmhHsJ7SoOw5tCGyGkwqDrmE37cdt4G7pMV6MLWzIv2nTHa17N%2b41lspnoRoyj5oMVyBI5r591xNWni84spnWv1sugi/uMeCTyTbyF8qLlKvgznR0Q5CauEoDANaDqhqYhQv5zIJ3sumnMrYr1r1VtfMEGc7xpQ%2b5vWx2mSRdtpwyLLDy5zWK1BGHmaQH5CMgkJKyesKR7V1p70/O%2bDa6NT%2bTcScrzsqj40yXVR9PIvQ6ObzoKIl3zuUayoZUKdIdYYM5b1fgW88UUSq1ZDkrPGhkN20bQz2W%2bjg/q1GYuU3dupXWCKPfuj75Tisdsqz3KhmVCcO6H7XG3diUmM6jbzj71W6yImKKOPFvsqDmthyc2J9cZSi1P7ttu91PVoBqnahsAfvJLl/dP6ZPGNyvbCVNngGPWen7JUfleDEoDi3177QxlfuZgDR10c3Z5tOBu7DzYr%2b6wMANRSajwX54tKJmcHbRmcOj7p0sdprDm0QC3ot4gb6RxehvUXBE%2bqMAerLbZ8fUvKIJ3LllrN3QYDissHvRxfgQIpVJ4lqSTrtJhGKnRNj1URUNNjY9NEwINmy6JP5XjUjpLhjZj3Xi4dfz81UgbbzfqQLcDiEJmoPzXiOWvTdLtb/tyYIZx/rwaqm2z3vNZK9SvbOuNJZTpJhWam%2b/wN5nWaDKRVIdIPY3Mekt8Gjl4XrPx1NP6Eqruzsu7t1Cc68D9WAPmCyB6wWtTbUs5t9FPu7ey/E7MxcDH4giILje4JLr4VVpicuVj3vyTJJP80WN8SLC/LDC/mGFJCHh4%2bJPLuWYlwr13ME3PFDhzS%2bNcG7TEeb/%2bk3d6wTtvCbaiN7zEoXv/wW8703NR37rV3/y9WvQfvImXP/%2b59IDa%2bD%2b59Lt6y%2b1PfD2H/39nYc%2b%2bntnt%2b/79ne%2b7uvufNtTxiZSV1aN5EVIpmezV2G6WCB0dYESu1WVZtxHGR0ftKNCvJgiCzroehUaKe1psjANM0YeizxxghnGrHVNUIQIcaWR0lSl2OQLIEqQRjlK6hy5iZMFz%2begzHkGKS8izPrIc5HQ790kp/Ir/cNKu1sYBC/uCpTNHNUk0ec1jLeG5HxhENGc0KSvADUdKCr0mfDaZlDNnazaDjG2kyxw1/hAt%2bfksr/dx2Av/kp2feDpCpNW6y4r9UZbztOs8KH0z9G4EIzRHYUadzaTyYo%2bwTmdL3zN0FoHCwLVWpxkjkAcNdRWPtQOcIRwFKmEGVd51RramZKJjgHXZsitDl4XD9JZrQTtFnAcuxNNHwqzfkrC6nKuQaT1GZfLZZBjSFErl1nJfthWAuFUA0bP1MwRjTXlGiYws3IWJqDKz/apfFojyS63rBcF3HM4T8hmvFwHR0XsyorTF7txfsemypcF7jyXXQmiw4yw7mYpgGN9bDFCOcjLSkC9rrCqgyzLtovvvZHf8LyawdfFjKxUyhYZe8ZrqFv9YiQzlnG3x61cgYy0xkpp7LUMHBdDSq6sXIQJiWyv1Y%2b0EuMppWnP965H6YkG59SrM7eE4F663o6nBc%2bJ1rJL1WjbG0xKpUuMKaQkBZY6JWpWO514QKrHU1EmQ3kL5S9doFzWSFwJd7QUJvVE%2bjHYMu1m22X1pxHi4wKTa03wxaM4n5/Qplq4h/kXxhbSqALl2UvQHp/3mvh6qcLU0w42lpXgc07ci0pMt72G02B8vVSKSbGukjlP5vvGrQLVjRp/fCVG%2beIlric%2b0rrBE5crnL/gIvEa/IfbunosKynnJXCzAq7eLHFpCiznNQ57AYajEilXEp%2bqUPOLAxfBKMOBYdhnyxqHeYTisMKtg0ryQNLExaNP5HJuSode9MoIb7%2bzwH3nA1lZ5PODCahuU%2bMWPHDdZ5PVW%2b/y8fE/UY9kD3/gv3zss0987IPv%2bZ61pv2LfZCsj3tee2AN3J/X7lyf7IvtgfN/8dM/8oY33/ODO3el54c3tCVX1c%2bQupG4zAjz3rjYYDJWq7JqEkGD9kQhXMyRBWkLuNORRtO5eTZDQNplxdezSFMmfte8CcjCk3Ojzl3fFDphNakzYfy7HnCtSLHrZMhCDw3fcEatIsvckSdgprsoxVWmS2bcylYsbuJLMXGRstS3Obb98l%2b5wFhMauRAbZQpoIjXfxJ4Gz930/QWgjYOMm32nufVJODxbaHZ9uObEuBuE1OFcTdFkqSXuDIxqZHTHaYN3C0L39N/JrtazTVwZyIdgTSBrj2GuvGl%2baUN2o%2b1hYwqE3AnDTq%2bBoI8hCDejQ2DfUIHrxwX86pETHDIL%2bV3m5K2pV1h4Ze0ooPbVUm1nu9k3cmSp5S6KGCWtmQv5jwCrqXQDpPtdLGatlOOJLK2XWg4JAw6MiDreOhkpRTMPLlx7tNa2wZtq8JQRr%2b%2b8hh3tOTnmFa/dY2WeT%2bp8Gl/n/WYP3Uf8%2bag5n1eVQK%2bLd2cMdHcanq44lFp4M6VE1voqQ3c2xVZreRJ7pDVDfF5PFUMuF6tcln23cxJ6Xsdc2sga5J7%2bd1W4933PJGjyX1t/uvZVQJBu8Zu1TLuxQIDL8SwzEVnTwvLrVwXVmKhJWcagYy7bxj3IllggASHI7qZUIpjGicdzFVFk4DKXycumm6BZuwh7etkUwJPWjvyqDiqETBidBJh1qszJYKOj41NR9fHMBfBdT/mErDplMQ8PANogHWnkcdwmLjK9dkZcN4HWHbiHO%2blGrg8BXYToHPOa%2bK9UsVss5Ek9raMUo9A/UBLWa5HaELax%2b6VonPn3NT/KRY%2bhjcp8KnLJT53LtaGOFUDKsH6IfA1Gwr3BtAuOACuLIGFAm7dKvHErQa3ej6GkxLx9QqPOz4cX%2bHusEZD2d50jil8Kc71xGUPMZO2Q%2bDmrQph7CL%2bzAS/nwbY2AoxPKzwn74KuP%2bVEXY7pUzZBVcy5xXY9ls1gbsjGvn7zwI//7Hm3Q%2bmD/30f/td9z/0eczC9S7rHvgz6YE1cP8z6eb1l3w%2bPfDWH770M19z/11/5fKT5XlZsk5miLxQMzz8P3lpOOh3dPIQN%2bs0o4Gw8TA2yWXxYoapl6AX6ipHUv1wtT3dSDBAhjk6KCRrkzU6YnFQCDFDUytxmkmLGqNSM0MCzFiMAw3iQuuVx76HDpl3R2lbOsO42%2bVn7eXO4q5aIlIbSYBdfqdMxtESWS1l4XYCUD9Nc3vyLm4TrHwLWucOjQ9WGx082j1ChmzM5LxGJ%2bq1kbhlSSdlI0vgKzKYP1hAeBtiV9h364HOfmXBqFZlXL7cBQw3Wqd%2blIPQaoKxgGRiopR0r8jy6jEkIGTni/aahOSkQNXzZZ8kq7FMtcyHzPFcsvaM9r/V3nYRIAvcRSZzrIM0qChzAndd4IgLOsRPdIkh4I5b3uAE52T8uPE4%2bs8bC3TxMGeBJW6rZF3Dtkt3ngLaua8kmVqJkxlJC97lXKf4w8uw2yRcI8ORe4d9JpV59CrE01yCGG2cYJZlZ1Ntlt3Xtvw8SexzjG2egVzTieJNSrlY1qXGw7ZjGBgKg3%2b8A9rDcDSDb/MTQSI12fTo5/zgakSmnWjaG51oyCh3TR%2bMGQhKkK6DPDs95LtP6NwtCU9iQMttCOAX6LUSVe3kkdWrqkRXhVgmM3RZKZXz3zrGoJKx4DyKu7pKaT1TSBn0mueFTFvRhteoSwdREqA4UyIa%2bCiLGpsb%2bl85rzS4ES35JehaEksAdzQlcgPaOTfZN4/NDKgPgH5Ar3Qg3fWa3TmUlR7adA8OEW0Y%2bR09Lg7UAI2tMKHrCjAveJ%2bXmJ31GgveZRgdJcEBg4IPL9E8fLVRXgO85rxqBsaPnW4xbPbjC1ZPBj71WIk8r3HQp%2b68RC8GHnvSRcBK055CZ3%2bOxnNEvjZbNhgtQxR0iuEqZ%2bQg9tkmhc88vkC5cOD1ffyNV1e4OHBx/0sV5ksgy5Ro5KXCL4D9xoOvHHS9Gm9%2bwMXf/X8O3jf8nff%2bZx/8V2um/VnvufUOf6Y9sAbuf6bdvf6yZ%2buBr/%2bhz/1MsXzxm17%2b6vL%2bxaESvXvkRaCwkg/2Z7KITBIXYZ5hESRGCqzQ8xsc5kAv1C8cTW4pLLIMYYc0pRLmPafli3lVSxlzRyHMJsjSHiLq6OnaTgeF2EM110wrdZbDqhFLuyzWQDw2hYWkwMtc%2b0aznLokqpqLty/E7glfaAHHvCN1vuwKuDNhdGztGckAtkEEv8AmlxJB2IRT29EWuPNSLYOvnS0xqmoB6FYrz7UHumoMJNmQlnQlNmxBFyuLiVxUe0vkpvJqMq2x6Dna%2brEFCq12eEztsCSqaYmJbCRTLeNuOkX04/QpN/aRBNKyEmLOyc/mdS3FbKinboP2Nh5bSThEg21kMeYpJ/p2o/E%2bBuHML6u/mUqqBO5SFClxRHvOtsg%2beyVGlGKl%2bTFcL5IZe5JWgSabQyxuNKYt1BLTpcZKXXhaaXH7iXwCvIvuX9UoKBFoIdlV9dfMAPdjiFN3ubW9bMurNGA%2b%2bkLKilZ9SQlEzmt34WcVcoKhlq%2b76NKt5MUEIDJWz6DKYZNZ8MmOCzvThs8ybierspZ6ZYXJqsmKwddymnbOQ2sh4ejxYvrHXh3vTSkSlWlP/WlBe0RdBIrB4piViEzzu%2b5RYuyqm2%2bToEorSMmrkXwTul85Yvuode22BoMeVkkkpdTE6Gd0MK%2bV9KmtI9AAUwlOdRtkvAim/RL1QmF/J4Df87DJSsyldrWqlw02zngorxVozhKC6uU8Mu0EzJ%2bDh3tQgqklF5hbUQFUUpkuF3nMS1ygv%2bWhKHSqT9MFeCtKwSgy/ZyLY22Dy4Z1GCMzsODfSq1nZ9zMb78Zo0mulmoUANfmwJ20q4XSkpol8KnSxYWmwotSSIIq75mlB/y7y6U8%2bh65VeOg52M6rXD1MldTAS9y0dvPsdsrcbMKkM1qeCGwn4UIqb8f1rgxrBAmLi5em%2bCDeYB6ATRzB29%2bsMK3PeDhwkYEFVSYTgnY9XjRs4tF7G7WPnw46A4q9F/iXX34D8aXP/KPf%2bU/WoP2o1tq/dMLpwfWwP2FMxbrlgB4y9v/z53XvfFlX/X%2bT37tP3jZi6r7rU1kbMC7Tq4C%2bp0jJxnKZZiQGi5mmBnPO2FYFxmmQYq%2bT61xhihNkfNfAex6yzMtXI7SRDPy9B%2bezxCmHcyzmYD7oMrE80Hb8unXuxs5cIc1DqME3SiHd1gj73tIaLVm3ohkY08F7oZ9JFTo8bxt2UsbrFlQy6TXubYD7FL/a%2bk%2bMq%2bmeNMx8G4vzjbX6OUVNCCXxL9FhVHVIMoqcZ3gB4dlLUD9JPqy4MUB9e4l%2bh0P7pIvcQ3KbZO7yoMAdfP9K6WDsdCko4e1bBSpTFu%2bY8rdMyDqoUZOL/rpEbAj3tOJsZUw7sKymy%2b27H872VK02QakhzkBVYNFomVRIV1T6N3NjWzbvEaVOJKYqRGWKcgkPcHVlUaALzXTVvZz26TJFqBmGzoE2pEjlTct9pSkVYJIBjNcgTDe75QB2WsQrfuJRSEN3HX7WISLmwDyLo7Or4tMoqtqLI0UyCiEVkDNTGHNuK%2bYbt0Zq2q01PlPFLoBHWY0Sg%2bVh4W1r7RadlNASZh%2bGzU9y5PMrt6c3M0WdrIDQ029Hds2sG%2bz7/x8ZjT0J8/Hz6Zk7x1X%2b7y3gwqD9m1VTx7LOgYahHNVTRMFG6SM%2bQP/O6UqsZbZsAATLSEtM2BlYzVwBsAtoyunZS3LJNcOgkn6ZAAAIABJREFU9ssMWx7tHvVqka38TJad23SkwTyzRVUBZH4HwYs58Do3ZMttUFIjLxVTgcXZELuVTpKvnsjh3RkKsGcSKvuV0hiy7QTsZNV3OeeYO1QCQQj0WVSOenAzhiwGR8crmRUO8NQtnaPBPH12Hcl9ygc5Ryl34VSdTkoB7rMzXjOlHt7X%2b9OdRoh386w4GykwvrhGV5kl8CiPvp7jXw4dnO04OBxV2IqBJ5/gPefCDSGgfX/eYHvTxZR6dyae3qokQfX6zQph6iAIFfxPTvCHcYRw08ebzub4ioseXv/SCNlC95cF7LwuVsi42fgIaNsJF%2bfuBm5cUvi3e827L/%2bj/%2b1dj33ib68LLD3Lvbz%2b%2bM%2bnB9bA/c%2bn39ff%2bgw9QPD%2b4Ovv%2baq98Zt/Fk55no4DVXeK1A3lJUVyrM/CTAbEs%2bjGVHTuTHxTiPMMU2MlkVAuE6YI8xmC9KhGumbcOyhmBO6G2WoahGlk0sUItnTlHGrjhSElOp5WyDo9JMgwcxL0ZzMcJgk2ZjMsehoAF3mlX2rmfW9ktasrFi284%2bGgKNBnBUirN7c69ROsOY9XC2DY1Ef7W/aWYITHtywd5ec2DZkCiqx91eBcZ4Jr0y76pB0FwN9%2bIAhexMdaVgIcjIoK5zoZZnkfk6ZEOtMAm6z7vKMZQi7PtzdJgCOIntVYdAmcG2E9yc6H1MZ3XATTSqQnrmoEzHYNwsqghAF2VvIJE1QwZ8GgxNj4fi%2bNBMZ%2bt1ELrBjsU9l2Y5toSWcpcmSSSS0zLUmeroNpxeDuKCFRYoa2bt1%2bMZNHjVadfyKItk457Avq0y2AXBWZsvaOR9PzSFbT6kwL3Kel9vPvONq2kgGRliQc7WyDO5GnmDjVutSkTi0SDNG/G/2zlRqJZMachpieYyXlAwjyTf/wY5H38By0HVU69%2bCZKs/KKY2sSgqNGRBttfZtuQyZ/zYbv%2bpaw8iflM2cyri3JgL74mT7bE0BW/SL55TnidQsOLHUUUOKMYlE5IR6il/D41KXMND40HC1JS3gTQ37zfwO7tPRq3Y6cDGadvYDs9Wnri4AZZlwyt3jGk7RYOF1cWu3wC5dsuoGZdlgSZ91FkgqgPkdIbxLOWbnI5yn1E2RZXdxV1HKPgToSzPOZ2Ogs9D5FQTwfuohkJWAIzcZIdfloQM0I%2b2mRLY%2bIgEyKTE86zWDG6VKux6yaQlyH5TdDVj1dstrpldKJSDfA27Otf6dUhqpTA1gK9JeXpfnwLUrBT7X9ZEPK0yzBpsd4NFLukK2E7nYGOY4mDfwQgf7WQA/BOY3S0SJg2s3SoSxgh%2b7SP5oik/2Q5QT4C8/WOFlZz2cPx9j06sFsI9mzBPQlXhlE3lMg/3al3snCFzcvAb8hcGv/dRH97q/8OPf9/VrTfsapbxge2AN3F%2bwQ/Pl3bC3vP1dO97dP/i%2bu87h/jwrJAGrs10J204pai9phKWyyVLE5Kyoyn/r2pGkpWg5wyxMEc9ncAxoF8Ce6qzICbWiIjzWr36fWU2tCkmL2VwwFoG7sIGCiPWWIcFGPpOX7TxWiGeNAPe4qDDm0nFM9r1tXdkCVcKIkt3TJcoFeLddZGS54Li0hWiKS9%2byys79W8CdwJ8vTtl4Hrug0GYY%2bXJ1DGNOj%2bq4AuYUaGv7lUlZHIF0kclU2KBThs5/w2JviWgQiKSg53soxkv4/UCXkadGPSNDVyNPj2QcxCC0jKTVHpcL4uwI6BPwE3Dy7x3yhGxrQ7msQpfIjsvzUPJS1S4yFk422mbQAcKshur5gjjIzjIW4YHeXDO1i9iRffKEMg9d2Ica9xWRzRd2XmNaOytQKswxT2MAVMXvMX3NNZdJ5aLjap9zBhrCpLeZceP6QpDM1YWVj74mT0Xqsgx1AMOpZxQ9Mq8F1BuAK2y8pZvNn3XAV2NcugK83FklKwWrxMuTjwyzMmMTZXlOdkyYKrh5hWmhr5sgmvObKxR1ttSA3oBs5iaIk0773DZvlNU5Ox6CKYFUC7i3VmGkKw3FzpUNetFzOymrOQnc2ys53P92jLvBYE97WLYlLrx%2b3mcn5VHsD5FjJXpsOo6HishaK1j0PcjKxASyzwDcNegn607hxZHDkW2D1amTbZe%2bsCtmdm2qw0pJtBzSZIQEZREZCiCPOhjuLKGWCjvSx3ofyl1YjXTz3gg%2bddyohdDY2g0kWFw%2bNsf8jghnHGDD1I6glIv7pHSIuVEqAe20ZOV5tXJErnVCVt0Ado4D57f4p09L8VA34Qh6Hf3M3Tcdu33Ba9zLWiJDoE5pDIE7SwJcmgEvSkQ9iG1apDYKf7BwcXNe4fJehaJocP1JHWA5gSMVcnvDJSZ5JU5eAWWJ8wCz/VI07GTZCdh9ftenp/hEP8LOkzmWX9nHd921wJ13xDjjVQjiBtducf5SEtPgySrERRbFIMnQKAzhIQw93H%2b2wfd/FO97y%2byT//Dhj3/2Yx98zzvWDjJf3hDkBX31a%2bD%2bgh6eL%2b/G7X7tb//Id/69N/3EzT8sBVmIiYg4zSQoSoVuUqJhQmqtAb0tZU5NZA0X8ZIOMB1UdYOuthYWuQWBNclxSbLL5gLyBUwkiWjfRRbQSQWoH0yBnkmm5D50muGWgm4zQOUoRDNWwQRiWh4aqbzVtZv34bGBtOweE1RXJdQJDs0ytMEOrQzQFnI74QbDc/VUgDGTWi2KsVp2C/JNsqO%2bSgPW5w1qRSvNA8wXm2CJKQEafJPbKqu1izQ6xJV5D5uuKwBuQqmMr/3bu/ybsa88mGqNsCRjnpCLkG0ns86do6kG92xrPKuwx%2bRf30W3rjBPXLFkMwMlungCd8k5sFaBPrlKfQ10ixGm2HEFuFMSQwmMMnSu2GKLZMbFdKnBPK0oydZbxpx/JKssANZ0M1n3ftfDjB71bWSoFHyaWlPHHCmE8woTOJrtNpskj9qEVMvIm88FuJvCOSUTIwnODSIW4G6kMnJ5ZOctc99m0gVVMr5UCNLmVLZdmmL1KCuQaBhv56gKpuzGNnHlIaKEqJZgR3z5M%2bhqwFL46Ujmw2OYXDw3OQj8vePUKMKWzaNh6fmZTEHL%2bDMPwlSotcPczn2lXSclUBJk8d40qypHSbTHuXZ7icLQtzaK1azt5Mp20%2bwypnaE94yvE6aljcZ6kgmbUmfBAvdWQC1VXo2Vov2qdmtOAnc2iZVRR8MC3a6nC1DZA0RDZTQptHrslkCmA8tOF3CYOMlJtJHjUHna3501LSh9YXJpH%2bA05POQv1O2shuyqmiN7d0As6IRhpxylHtcIIyAwwlwYKz3u%2be8Jr1RqrDrIeI1W3097zGXRZwM8KbDC12Tpjo4J4OezYAhCykZ5MDxY9/YKcr9CPSvs9AVWW0FPJ7rIJQBx92GG/EdhUcaF/uLCr/38BLZvoNeF/BCF/HhEorJpT7w%2bL6PbL8Wl5gbBOskKQIHgadwYW%2bKD%2bQh6jngbfn4mq0lvuMrFS7uBphOtI6d8iUKBHmPXqkCAe0UxjQO83k02/6q1yj8zofzR37lp/%2bXb3/VAy%2b/8a/%2b0betQfuxO2r9ywutB9bA/YU2Iuv2rHrgtd/8s6/%2bT/6b7/mN3/pwfX4jImBSmnk/U6KoXQT7Obxd2kNGoJ7Svr5F25pr/17vygLYquBGCcbLBqmIk3Ul1DxI0BX6SGEpspij3EBhAJME8%2bkMXQPcybKnLdZ9ihTbrqbt6FPOBrgEKSah64DVU60lZGtcjwF3C6yMawqZ7kFiCihZAG2VL5adt%2bcy8hgLYOTPJ20hzRI5PaXHGcG9gzg5RJZvypI6mevFiGy6r%2bULXEI41pOaOU6jEfaydGUXyV0J3GmfR5xVzTSLGoxrzBMjmzHMK7%2bHWnFKYpYE8AZYMxAgeGJQJZimAiYE8ikQZTUmDkGxwqzlIJMT/XIzSEFAnjhWaODetj/kngSDGiTq42a0Kgx0ESLuv4gciFzDaLfZTgJyAthYeVjKaoHxHbeWgg1BM4O%2b5jjbbll16oVqB45Dht45VlSKkyU1QWTW0oSzSwjc/WWDaaWvqeOWyHi8uVbrpMS%2blyTVyNH%2b8CcNkkzir8zJE6qP1TSknEMKYJmk7aaBm/hYlBqkccVA5F4E%2biZYtH7z4lPfMcmr1O8zN6Btb2kCLsuSy31ppDYn5TQB/f94L/J7Ce5MoEUAr1dQqJO2Y6iTjc1UEb93Ts6FDcSsFN1Yf9pht4y3tKFjph%2bDE1MgzPq062RQFlIiSjUstF3Zio4CHrlDRM5OKVmIUblA1wtRN6wboa%2bh23UxGlZSJbUxCajS8Dbb3uhqq2ZxAwFBuFNhesYTP/HdRIlbkUPQb1YXybSzvtt5gvcSWNTAuQjIyM4vavR3A2ygwUYERGTHA7oQ0ZlcTwXp0gYYTfgMBc5veprlN0XQGH8ToOdZiRkrlLoadJ9vgJs8F5OWlU46ZQi9y8J3poAztexmAU9A%2byM5cG9LGiaF3ZSWyNxHW9dK4eCgxL%2b4plfsOj0XvYMc%2bzNKYxSGeYj8oEScOLh6q5KKp16gcOHKBB9YRGIZzOfd932jh3vPNbi4FUB5FWYzgnaxE5BrJtN%2brQpwp8dsVQfXmwDdfA4/DbF1r4uHHh5/5J/8D//3j1361A98YP36XffAl0IPrIH7l8IofRm38S0/8OSvvfqlFx44yMrzt0ZT7Aw6KBb0eJ8gdlMUdIxJSllKlRc1JRZGglALQFfYwAxemGBc6LLiRCZMXOULTEtoCNw1TR10EhRTDcZl%2bZgghVIZWTmfoaEbQXpU/Ij63oj%2b5DbRskXDJTPAMS4pbcDCXbgsLy/6U8Z2leRnpBJ8%2bWjpins8AfCknIbnOvk3A7p0s2w2J/U9DGwOMV9syBI9wcFB2eBiOsaEhWAIPuIDXMt6wrAvxwXCPn0XgHFdinc7pTJMViV2FrkG9dxMcFOevKCH0xIL%2braLS4dCt6kw5uueNomGhWVRo9rVgdQmKkxE6KsTQSmlcV0N3AXwsuKpSUqlrEMYd7NJV5mYQ8bKWj%2baz4/cU3QlVctq8%2bPQ8dBkSx2hmHNYBrpMHLkWaYtlziVoMaD8BDCWxFAC9lLr8QV0G907XVoI5Pk1VU3bQe3PfbuNTeF0I7S1CaeS6Dqldz2wZPGZZYFZw9S6E9uxaO60SaZdVuhYJDmVDDoTD4u6FPlQST89ynrEfcPo9O2XGLMUssotsxeRm7T19PIzD2cCq03uPU6a24%2bf9QlnAa7gTmszSXBv0ahRqEQOE5f1vLCe8bJCIfcxxKLVrgixOFpHaQvZUcGkaiWFxg6LUnJJpMIxTzTXwUuXNDBBb6WBunaSYaGyJXqOJwWO7Koff%2bh2fewvM2x68XHPdmaATl2R%2brGIEs9CJU42r/CxNBK53RZlNYXJi2WQRUeYgRKpCyuY7nY1WD8bsiCaQq8sceZChNRpEOUN3FCJhzmPk%2bDMFCRjNVKupNAJxj4OJpNyZYlIkC7SmDkw9IDQAPerJhijA4vYJ/I5%2b1SO9AKL5B1NYvPI1AECk2ZrYMfc63sZkPjA1VzLaO6IFWYK%2bBdXGnzoV0t8xb1L3JjHkiw7vUX9uoO9WxVcMuz0bb85wfvzSOxYw20fbzib46%2b%2b1kUvjbE01WFHUixPTzJ%2bB9vhqxrX69DcI41UROU9PZsq3P1yvPdH//pP/u9XP/Uja9D%2brHfheocXSg%2bsgfsLZSTW7Ti1B%2b5%2b46Wfv%2b91d7323EZ5/3CaoSwa7G52sVw0iLcLFIWDTlitSnVvHJQ43PZFLsFHeP9midm5EF0XYN0dbnExEwmNLOPPM/idVBh3eci3gHtgXGjCJJF98%2blMA1Drla0aBHNgnlLjTq075R/aN1rAkAH1kpRotdPmzabdKLRfOm0X%2b20LOqGKjyQrFhtaVvoYOCfpaHruaRjQ/kFAjYtOcoDpbBOOIsOtVow7VGU08gxIyFPpCqYEMtSw9wMPE4J1JqGmjnijz6ivoN%2b7kTUcTjUTukGGkUmL0yUy1zF1aTVbSemHACcjt%2bC/kowqtKLWtws2pNzE7KtcncimOXwNui1op7TD6QWox0vN5LPltkKq0b1Hswp54ortoWBZx0GVFfIvG7qIXWHYKRuyHcl8ATLxStUI51oD3/pYWkKvZ2HTT2G0DVZdzWeRzzCxM1PS92KlSEClSwAc2yyutXh0Bdzp4uHWKALtUEPgbr%2bHzD3bcfJ7n%2b2RwnbJeQiwjPSHfaDYN4auzhqzYnA75r79JdYCs5Xky0bJvSMJyTooW5XEtccexUtSbZcuOXZjBVtrCWqwIEIp9qTzGnjdiwlA686AwVpRrfp3BdytHMbI2Fa3BTXfBNgOB0L3vFIOxqyeynYnDjq0W6TXecR4ncC9EVkafdttMirvP8aWaXrc/90yCcfqEtgB5j2ZVojgyvye5g3CXOGPt3z4ZYXNnq4ey2cE/%2bNY7fSVJJqyquh2B9h06Zqj0GtKCG%2bwHeICgTcBd6gDEp57MdeSL3GcoSVqYhh4gtdZKc4vXHA8ZJVTs7pEcE4Qf2Ou/0bAzsA4GRYY5jXGO2w5t6NiEFwNOC8rFdr5how%2b3WH4d7nnaUGbA9eN5ST92Ceuiycu5/gnHwQu7LhYHJYC3CmZuXKLAYiDu26McXCxh08/usDGdoDXb86xnYS471yDC5sBnKBCnuvnxGiuZXBsm%2bvWuFaFElxynvijCepeT%2b7lO%2b9TmE6W7732mU%2b%2b/7d/88Z7P/ietTzm2Z4X689fOD2wBu4vnLFYt%2bSUHrj4xo//yAN/6cG3bzjl/aMsE8a5qmqcGXSxyGtEZxr0wkpeFJZr2bxV4GDL1wl3gStMWLTIpIDJPNbe7SzOxP2zMEVks9QIZhtCc%2b31rje9FMydg9RKZzQdP1UpNucZ9lO6yswFsBO4WynBkC4U9Cim9p32fwSt1NOaokwWiAhWFXs1F0OyfY52mhE21DmqXCqsvU1M5UGGXVcxMJ7W6NHZhcfEgEMm2%2b4bu6IDtWyyExP1KJHMDPdSxANf2zy6PirRuBNcGo7ecVGSpiNrmjqg5SM3Yd4rXXSKkplqqqMiAnt%2bRqnL1OViuu47ykAsstTOMYQzCrOOizirRJ4xNcCd5yRo4T4j19VMPFg8SRdoqiaFJJymxu5REi7FmJo66xpuwotoRFZhRzG0YnIoVKwUoxQKgvaZ1vaLvaJyzHk0cI9yrgC46NK9xThhrKYoASPtKp9GdT99EgtAdiQcgnKYXKtbRdDMPmEAwH873nE6elo5CMw4cH%2beR9xATJIpj7f1njhAXY/tPZLmtFsScxWg0My8sVKXj0V5ZGQu%2bry6bSLdsXIgs/Jz2wdUmw63O5kEVp4nSBX8uS7sZQMVW7X2ZPEoHs52WMHWsaRXc58QkMt%2bTSNgcP9GhI2zc/jGRJ%2badzaJUpq2XIaMe9uyUhQizH/xPGHZB56LUUXgp7MqqqpBz6yucV/q2Lsu55aSYkustGrPrz3aTfLpsz3JjWukgP2uZttHY%2bAxlDgII1yIaiyXwMam1tnx%2bUOwvttzMauA3niJxVaA%2b/wK0yVZ7AaJ54gF4hk6MzFfInIFaC/nJT4x1KtFFwj2S4D2ubxbORcm1Iczd8UHDukAIxVPtc6fm53fi2s5JmcJ1pX8be9KgQtuhf3GFUab/dq/ECK6luPmRijPs10p6tQIcGfAwIRV1tTYpy2mryQwGCoX/qzAz74/Rz4KsDEArt6sxFHmwn4mVqw394A/IprPgJffWeIdr4vlmXWhp5P/5zOFkXmG8JoscL8KX1YGBtMJsl4Py3GGuJfila9R%2bNCH8kd%2b4z3/5u%2bfGRTvWyeiPtuEXX/%2bQuuBNXB/oY3Iuj3HeuA1b3nXWzde%2b4M/9LK78LZr1ycCrPmyPbvRwXzRYCOcoVo4yLqBZGpt9CvsjTxsd0qUtYMNNUMmpTr1acmCxwvtFpMLaKdkRomlnQUsIpcRjzNzjGXHqVVNHUybBClpOCbu0V1mPhOpTDRTAt4FNDBhlUDeAGa%2buCx4Pc02T4BBRRDhrIxtDmvKYzyMyko7vrTYuhXr3gLvjfkuKa5EK0fHRc3COTgQTbuAxfgAmWHd5c0uDBvpRYXFcInBzgzTWd/4revPy/ESIcsqEmSS3TOMe5rVyATMu5hUFXouK5pqmYKQtkzczcjSK1DWLV7oZNLnPJUj8o8N9pb0owvCIMpiElcv8fspj68wcbSDSzUt4XUDA8YVqukSbieQJNLE91DNdLIqZS58oxPYz6ldN9UnCe4ZfESmwJWAQ4n2arhpIB7lgXX3cRpMKXdRlFNUWEQuolxrzm00wOMF2Fi/xFPuXZ4%2bUTXywBPwSoY/WlYC3lee9hwXAvtGgYCWshKC8KzRFSdXm7WaZADIvAKZ0BpgU4bD6SGuLa2nOo/nfmLnSMabdpwnA45Tzsvk11RVqNge2k3KxZ5ygaawET8RDTzvmZbG3haNyqm5MDehPQ2nn5ybx1B2Y4I7ceqhnMjcMxZst51lLHCXRNpZgy6DVgOIT65QrUh%2bgkeTg8LjtUuPXvEiaNfKF/ugMFVLzVwy8Q1YcIk/D4sj4G5Z8fQLAO7WPebsJjDKGjxc1Jh0YgRVg7NhJfp17kPVDwE%2bQTzVXFs9D%2blkgTO7IcKyFClLFDhI3EYkhPnAw4BJqyZhN1LAowVAoyAC50dyJZ7ufNZITEhAnwK35sBeocTyce%2bpJS7cE2L5lL5RFIvRXYyw/%2bRSxoXjxtQESmqu5cDjhzq4OJcCL7/HlzbTfjK%2bNod3LsIgaCTo5FiRZWfw8fDlEmlIG0YHpQ/83PsXeOwxH9tntO3kzo0pruwpPBzHCAaO%2bN9//0sLvPa%2bCKVTyfkI2Fn5VAqQmenJH6/tVrjrusJ1BLjDK7HXBKtUj5e%2bUuF3P5I/8svv%2brnvv/Tx/2Itj1njjS/JHlgD9y/JYfvyaTQTVAff8N3ffe%2bfqh/M7y4xnBAd6BcTWfeBn4kWdJLK20gz75WDXkf/XCgX2zcXuLUdIA0A76kFlhe1V3vwVIHlxQBVwwqrdNKYIYgTLOeUzSgpZ69f8Ar9usIs7aEYT0UqI1tWo%2b5oV5l9ernnMxxEqQB50cifGKZjftKmbLyVAXBf6m2HYY0u2fLTLPXs%2bVqseyMcWHWkbdcSfg3cDdjX%2b2hAYotIOY4u6LQQUB5qm0fLIBrswqTVzZ055k4f5Y0l8q71bHfRqAYJXRuaBl5HG8SJ33qjl%2bWZkBpkjfxrtzx1UWY1eqqRaolW2jGFi4VJRmRFTEoVzrG8uiTKapZaeHyrMZ8W8DqBaNyjeS3gvRKNumbNZSOKUxxFbY7tpIEAfekcgxy5AsOKoImcmExlhWBB2Y4SeQzBs%2b4KnTW5jPXqCYEMLSEJaou5QjBeougHElSmboWZSS61102Q4SeOAPdlxOq%2bBOUOlMuR0Zt1nCGDLnGAA/ROOZegzVOSUSVcIrvdceBTT6GU5C1YTTw/Tj3tYy0Mv%2bkmCQxaE9W4NYrTDPutYpahHlyUJmA4Nq2NPGYVxNgPDSi0FpgE7sw7sMm%2b0o8mOdqCfdHIm1wRYf/tNaWUwejliXaiscw40zwmJ1s51Kp9DCqOCiJLwGJ9222f09mJG6sIc/52PXqtNxhFXfSzCapIoecGGFXMhNTFljgElMrIT0xGNaz4yu6x3UHiDa//YJNtRa4iPvgKG0GDDx02yPMKo7SDC5Mx6q0UxaISr3bqwxcFMNhw0ZsusTwTIR0tsNwIpd7BxaBC5DH/Q0tSJIig48ymh03OOwCPlsz5AK6XwPUnlnhFUmN/K4JbNXjM9XCPqiQwC1yF/SsLXCkc3GWdkcxUIWC/sdCBqshoHODyEHjxQE8fymJmBfDKoMKlpYuNpsLyfISz0lfawpJzOhiVmAx8PPJkgQlXmUIH/Rj45Y8WOPjATCR7nxpoHTsTT7/hgQpffaeH%2b877OLuhcGOIY0WUmMYvKyTSzlqCEY7o9SaUpFTKvqpJhrCbIq4VNr8JH/nvXv%2bTP3bp42tN%2b7H7eP3Ll1QPrIH7l9RwfXk29gd%2b9tIPf%2bgP7nrHgy8p7x9RjClAo8G8aHC234XyDuB3%2bvKGrJmolZTaKcGapBjpBV/6fMzHkRKGKC7nyLwUyTIzLxa6hSRYTmeoXYWNusYBy2Cb1DLeLEyu7PLtmDhiDRlnY8w7HfRzLb2xdKcF/VbpwOZwqT6faNZ5JQ1tgyYuIRM4HMdS2qKRbDpfptbqkaeIXCQ4wGy2CZWQgjqyxVnJlKUTtEKc7SdwtxaQk6rAQKwdK%2bzGGa5lqQBhvxsgDoeY5wO5IurcB4GHarzErOsimVZwuwEKI48hcJ/WmomfKi3HEEW6BDW1DkLMdbINh46LgeaLZZuRbSeKJvdPVm5cIKfdT1WLC8jsRol4JwD2llj0QgxQYq8CdlzgRsXkO63Z5UaGfTCvUXRD0bLLZhxT%2bKOw8i3gqwjII8nDFHcZHh/mDcrEFTaY8hVpOr3jU18nsRoJkNgkrhh3YnvdipO4WicIau3IMmJuAWsMVMeSSm1xJatp/2Lu9JXdJDXTFUMdrR87BobNE9/KdLRsx%2bjuhfnX35yxyJOsxOjrkcNOYdxXybi3kejwsLJSSFGJZSQ3kcfMgLhr3JhsQEYpUKsIlb2duAJhk5lF/uZo28h2grHObTDSGJnzuvnC2ptAWwp/MdfE%2bNZT2z4qClnlknvbIGxaQq6sH%2bUcelyZhKmlYUf69ra2/WkraQa0J7zfOc8nOq6U5NqOQuLVmOYKvzsuschdkcyUdY1zd0RCTFRFLZ7ni1JLZdKBh%2b50gUHPhajtBj7SshRpDB2A0khXVbbtkFyNDR%2bdYYEJPfS3CWaB7q0cw36oV3P2tFcjx4SyFzL4ZOalWqo24JLfGb8RqIemCjIlNZduVbhjw8XZrpZxkWU/E0AY9X5TifUpVWn%2bToQN46TE%2b2XvGrNuazzCmgi%2bg24M/MoHfCTdAAAgAElEQVRHC7z/39RwNl1s7Xh4w8YML9vxcO58jIGrGXZuh0bDzvFi%2b59qAtzt5bhKLbuI0fTmKj7pHHjzOZo0RTNX%2bGd/On33y/KPvHd4Pf/Y2vLxi3nCrI95ofTAGri/UEZi3Y7b9sDb//uP/fBe%2bdp3XOyX909mubBefCtzuVe07nRXiDNUZYNhGiN058I6xX6E2ZM5kjt8%2bT0JgdHCwaYzQ%2bZ1tbYdjXgmD1wgn%2bvkU31TkMduhIEPsqn4/vLvQ7gY0A0m0WijzmpEroNbUYyN/AhVW8Y8C4HOHJgycdV8bO3pBFAYmzeeS1dgPALup%2bUDrnC%2bASZN7ELRSSGmgL/lKmNBvkgXXMT0a59v6DZrJ3SdgEoN/miJoEswQhKwwWJUwO9pSYpYqjkNSgHTjiTyFZOlSFZKA9wJjAn2yWhPHVd8p3ltXHjoMBH2iLSV72fRE4Jvu3F9Q5bRJwWKni/Ain3Uo8ZdDnbQcyqM4KKvKiyzGqPYwS5BQAUM8hqjyMFZAnlxHGEhoQLKSljqRpj11KOcRuvbV2vn9KCuGiwTPeoM7MiIL2NXwGVvBdwBt%2bPLNRaxh3BZCTi2GnTiio5by99OB%2b5am6GYGDgvtNbdJn4a1xgqWabGRebZHgfJacy%2b2ETqoOk04G4LMPFzgqqjrUZW6WRGOt3wBJ9vACHA3aXEyeQznNLwlbe9ia44olYOsxoHuQGOM%2bTmNpQAyoQRIjdb1Ugz3yW3AoE7USGtE%2b25bF4JmX3zptMrcnSTYlI080dont5DP59iZIE7V9uMRIY1DVgHotMNVsBdG0Hq4OCZtO2W/aZzDDcB7qYdccdBL6hxbS/A/7tYYCPQcZF%2bllWoBrFIZIplg%2b2kFuDe6XtIswLjCthKFPr0TN/wpTIowftmU6FDr3kW%2bwVwK2dKuoPtGNg3hZOksvFOoLX%2bDKhvLbEPpZNSeQ%2bSWV%2ba%2bgnG%2bvGJQ820S5KqYdx9pXBpv8S5gSvBxbJWopvPiwZbPtBtGjDVZFE06AeOmAOUGz4Olwr1/kL67dFCITHA/T0fKfBb/7zGnYMF0gsu3vhSHy99UYwtt1rlMlvQzr4U1l9iyVravSeuMXoV0TAUOqFcOaA8JrsDH/n1//EDP/7R33/88sO/%2bb2febb7a/35ugdeyD2wBu4v5NFZt0164HXv%2bNffde3K2Te98Zse%2bM8n8xy1odPPbXRx6cYhdjd7UnlvUSnsRjNUhYJLhla82WrcmnjYIgsvBZNc9G8VwBlTe5ygLtA0X7TM4XYTLFkO0Oii/VRbQXIrZnMMVI0hHJxVwK2og3g21h%2bmjnaYMVUKE72yjrxsjkrGe7dhBE3VSZ0ARwBolu/LWrS3Q7GCZAXSCj3KX9oegoIgHNFHC%2bS3AF6kOgadrYCzkctQv2wKLy0mhUlOrbEbTzDNN6To0sz8e7CXINzwVwVXmKgqSaoE8FP6wivMUiUVUotJIe9MgmD%2bK17g1G6b7ydg34BOaLUb91u5yZinEcFzr6kwrF35d95xkRite/uWoNMFJTKUzXgE1GkgjHjkOJjzpW2ZduZFSJBFwKyQU2cuyazGdSPSuh2d4KrzIKTJR0VgDYNr1i2MHInNJcC1oFJ74PO49hXqSr4E9ZxIi1gDjrb/umjQxSK0wbTWffdsOa9H6xXH97XMvW2B9K%2b2ol9p32nTyLHR0hp9wfSP5xezQia3lbZ%2bdXHtnv/Cfl4l1U61jzo3sQ9lCgEDDdtYE4zyGuyLSbT5tr1sMhMvzYqVjBXvW7rMcLXF0LLCvDMIMEy7tSrlPry/bKXUdJWAzj7S0ipKZSRNwwJ3qqQogXJ8VO2IwUgy%2bJWJrYhqu8VWOObtSLtHE5yTxWYdAcrBKE2h1ObXbgBlEyB2lawO7HgLzV6Tbac2fCvBsmpQLhuRlPQXC4Qpc3gUloXWv1NT7p7x0Nkv4J/RgS970EOFJ3PgAue3jGktVowc9x1xJVJwvQZ7ZMU5p02Ac2WsAx2LgQmSGRMJ%2bw7gyUMG83rlYnegnW42ZtoXHmdCbDoN0qaSGhnch9fDlYS6cQT8k8HndHtsqdDxHNCQ6p//QYXrn87x9V8R47UvKrDTj%2bH4FWaZWrHsPP25noebY21fyesRm0cF9KdjzHo9OCzMdjhBPOiCOQd33Qd8%2bHfyR375Z/7X73/1a1726TXT/oXdu%2bu9X5g9sAbuL8xxWbeq1QOv%2beb/4603hnc%2b%2bJa/%2bk0/MR1NsZnGuDmcoK4anNvq4vLeIXa3%2b9p5IZlhWTgC3oNzPno3lxiTTjfJaP39EvvbITaRI3O1ADa4tsTyHJPOlPystllOW8qvIphNMWoc9B0mNnak0ipREN/hVkLDV9yKCRdFRIPI%2bATS4YIvGQKGY0v5rZd8W/suCXPGW3pcUneuK4WOG%2b2Qwsqjbp8v55bGpnERBweYzjehRP%2bu6bQ0GSHLB%2bgkQxzupeLDzuul5aMGmPRqH2F0M0HQ95EPlwiYhEpgRYY99bATT5Etu5Kgyv0DkxxK1p3VUHkmCnGKKQMOzdYuyF4TcGU1xq6HrklAtSsWfRMKadDOc9ToodE/88U%2bKbBIfXgxr5c0NTB06F6hER2rrHITbXxTCQjPYwep42FGqYuuaK4lMrFx/qBUaV6AoYYw50ZGU1BzzjrsbIW%2bmOObAZP83jxyMZhXNOQxSb2a2eZG1vlYQELbRwPIV4WtDO5nVcuVvluKIFUYFS46XmP834GBV2J8Qn5iAb58oQw/fce1k4wF%2bhKc2kDBXImM9mrI6TF/5DxDsCgMPB1qJGHW6O5NX/ujJYqeTky%2b7UYrz3GMXm%2buUwvM91lAzuRcHk5XG34oQYEB7eNJhF4nF0DOUZDP7DgYqYkfa6tH/n0pJZKPWiLSGU9LZ0TvzmRdG9y23G5kGI2Xu7VZ7LoK4wDoLSHB8cB3BQgLLxDqwWJTtJtMiMpo2vn9tIucph7CSYG0qwM/a2fOc7Aa6XSkh4nOMbJIKEWOFNKwwc3MwZUbwIdKJd87mN6QpPvw7A6uHywxLxzcu1Vhm1a3RYNmO5UkT/qiby5yzDcTlJQGNg22swWcM7HIawiez%2bSaNbjJcqMAzuasFqp/d2tdJIoVVy8MNBAnUJcAygSMTx1WuHvb1YWVhLXWyckE7ATe7JS7tjxculVid8MTpp1xz1a%2bFMb93PlQmPaBqrBXuCiaGmedWgITysQItOeOi4eHNTZDBweLBpuqxKuiEF4zR%2bYGmGcKbU926xYj08Oppd3X6kDORWtXAnYGE4uDKVzPgZfGODtQ%2bOMn8kd%2b5ed%2b/tsf%2b/DfXrPsz3ALrz/60uqBNXD/0hqvL8vWvvbb/q9XK8d74P5XfOcvHPgz1GUpCWQ7Gx08Us/xIhWjZBVCLhmXCuc6FrwDwTnPZI/pFw5T0AjQe7cWONwKseHMkQUp4uUM5Z6L5YVQ9M5BMRPwvpjPEaaxJK4O6gaHjgZJ8h42Lha9NsMqbFuDgMBdOZjXGnA/TYPbHkkCFCaSGccLC9B6xq%2baoN28LwXydmiDOFqI08t8tERIRx1WlWWyVzxE1vTRc3yMmwLO8ugWj6MhMjLp4SGy%2bUC7MRiARmBO0C6yGf77/7P35sGyZHeZ2JdLVeVWy93ffUu/7pa61ZJ6QdLAANYIIhATGAwewg7bImaYBdnzhxlBOIYBT4Tt8IJmBYtlwnYIiHEAAxFDRAeLAIE0ZhRi0dJCaOtu9evlve633L2qsrIyq3Kzv985p27e%2b%2b573WiEUXdXRku3XlUuJ0%2bezPx%2b3/l%2b348WkAxkIuWioUqcWyhGM2QRp75dlHod7mPWtZAlttKu02tafNXVQstFrjOiOwxBrlaDU/rCqe6%2bRmJjy0FnkqPTtXFYORhUJY5sJasheMjjSsBZGrXRRyHAnWFNK5mjpLtMVUgSa3tWKZaf7fBUMSbuoJgWC8mEaZvx%2b5cGnpH0KRIbsbucC4xjgMB1Kadp5MseY2ljlVnYi2MxkTWjKJh9wcRUsuraW1qutYwjRxJemwu7zQQSUvApZ1tOYmjux7DkzW2FvRedupL/RG4pLjkEPSecarRMp2dXGBtAT9mEA4zHPiLJlH6Zx454ZKsEXQGnFiCAvJspT38d/AhzPtEuMsb8hoCR7LieqeI4M2y8HJXdbIC7rpC7CFK0PCYpCpFBSXEu2aRGYOoi6HuUfRzWKpG50vfkkDNaNsNOBdL5/zLjxVwGgvNKFVti83tOS4C1AHAaNB0A1SoQZZaMtdGoRK%2bnnGl4L1Mek5Ql6thB2DtOGg0YENQOrh1a%2bMjTOTZbgL0Vw6otTNw1VHmJbmhj1clFH74Z1IqtZrzCW2s9EHC%2bNcqQr7XVbwTic2Bj1RJATvtbNlPLyheOWdKXGrTfs%2bLgBfoyatkJ%2b%2beeFfbBYq5D7YMM%2b6iWMXPvpouXDlRlXS58QmymhQRc0r6LAeKrU2z2HVirLZEysm3s0/MewLxvft52SiS2g2cmFiZJgadu1viP1zu4rzvFYcHZz%2bqkH7tOPH2p6uCyMxM9O2UxCrRbcONYpIzTioy%2bg1bkYa%2b2rlz78tWPfeI3fusDS9D%2buoQNr%2bmTXgL31/TlfW2c3Pe8999sPfn5Zx59%2b7v%2b0e/NwxIrkYeDwxiTgYP7Kx/X9kfwV1L0rE1JkCLj6PpDDIoWJl0f4UGKpOeh3y0wvVqgdVGxyuIWc5grZmldM3mCUoH5fhthkIkspLzVhrM1F/cZAj3zku9VJZKwBz%2bNcQRXXnmDqsCE303Gwi5Ros1kuloz5GdiILpf6NLg/H2hTtDJdadv0hy1WC%2baRZi%2bNhMv1Zq0TjReb/M4Vyx6pWYF8tFcKp7ypKldp1SGAYDgd9m8hmzTa2NOMN89BvGDjSl2J11J5lOMO51XWpK0yk2PLEfsHZNQJbCahV7toZa6ENgfME9Aep/JvoTDNiJ6tWuA3a2L2yuKUv9tucLuE1y0E3LnwDxsS1BByQwrIsoZNAE4ix/pbSTAaLr1SOEhBcwJskQqc5pxl%2b0ryBmKS41ajPznTneYwHurliRPAmdaK8psBL3j55X0tXiw2yohVOQUjZ1xewJtOtuQ3uVnkdM4Wl%2btMT3tKXllpZCSlu0Y%2bc7CsaYhwzkN2pvtJ%2b6l2wmdctKbGcKLHQVU78a2mx0sBu0x487tzKZGLsPVRd/emN0QDbyAcxfzugCr6UrSLxddfIjyFpOYysJL3K8nhvRnRxXyrQaNJiFV5OyOg7qRRWqVzJfooZfGqHwV/DKHhiC5x%2bqouhEcdZL4STY9so519noWRfJDTJO1jj7oHctkpDnclnrz1MYTz8/x%2bWs1HrmHNrYAXUutvMTBORf3dkt5hvEOYT1XBgwyk1Exr6fCdrfAc0MXF70C1XooUh46a20FJV48pJxE9YrMLDSuAU97c/04gVXGC8GvUhRKgEVXIVOpV1gCLQtj3Ll7UGJ7g5mrwK2dGhsbDmbMBdKe/RvpDLyFNnqOBBKcqWBBpt1BB72jGfLKRnvVFeBvjQo8f1hivtLGzkGJt58HNtKWCOmMll0Vg6pxvWzjPneGG1VH8wy8o0jB2LAdG8lRDNuyEbRt1L6Pg9S68qVPfuyDf%2b2x8Ld/5Pu//guvjbfg8iyWPXDcA0vgvhwNX/M98J4f%2bpOtz376w48%2b%2bs3/6PeKkFVSC9R5jY2VCDf3xthe78lLh%2bCYMpC2f4jJZA3nggRj2kRqzSlfMJdnMxz0Wxgc5hiutdA7mKOobdhrdC7QwMypUR8RrgHO2nyBDfKdNoLLLrxkgkM48Hwf1m4Ct6sm1anhXkWOIa0EbaWr5kJAMilyhIJGDBRodLsGR8YBg%2b4XgoOkeI3aoh2raqW0HKS%2bnEGBFE1yHS1x6cBvDzGd9zU7rQC5AKVRjpWNKeJU6deT6UD%2bpnPlGkNJzdE%2bTRFrtClMhSWMuwHt/Dub5MLgUT7TtS0B7s1yolnkIkiUfl3HNrLvBalvK5A%2bQC3AXfzbNXDnWsLCcwo9ruB3qeNX/dPE0dm0QhG00bcLZEmFWdQWzTw/Z5wJOSubV0ukpL7ScTHaBSiUDxrBnAnKdUKprHbKkeblbhwB31pKI2x6ZUmgYAIEgibKVppgvLlPczoMAAjcyZozl8GMq5P7V9/yHJqJpaf183cD7pIcGgFFqiQdHGsLNNoA5i933mf%2bbhJPdSON7lx5zFsIWL03aGNWFTJjkkj0pY5PUMmkVLFRZHVUIlIC96aLzOmDaplNh0y%2bSi9QybeOg%2bGc940SaYvt43QsoB1TMVZFNyS7TvmM8mqX54euOirVUUsVPBHwjlolejqoWjTBJK1S365TaUQ3T5mXb%2bHmsIXPXZ8KyKaV47m%2bixedKbYnHRxstHE5LFHWNtIhsz9sRBsR0r0Rwo2%2b6MUV819LXs%2b5MBdNPmWDFrNEaYmrZw7YTVuBYuC5GBBPkE9mfmPdwd5Ogc0NG0/aHTxYzGSmZW%2bvku9oLyl8g9a%2bHwx1vo7e18aGC/vmFOlmKDIZSU4tgK2BhZz6e10UT5Jsyc63gPZaC%2bl%2bLkm0LxyVeGHqCLlB4O7vW5jpGUBeHoaqBO33ujPcKtuSbN6PR4j7fXlWif3sYYxwlUI7wPMsPPQu3PjFf3X9d//w1//tBx5%2b26O7v/FT7975isbrcqNlD3wN98ASuH8NX5xl04574JF3/%2bQj2w//zV88d24glpB0kNkcRPKCPSp3MLC2EEdjBOOugPdWeIhkvIrzQYJJP0DncCov5dZWR1dPrHEwsbESMkXMRt/KELCcOZO6nBrVofgVwFrNUe54GKynyPxQpDPFbgsr6xnGlQMn8uFNEwHu5FbH8rqpRbMtXuWaLaN0Ji1URUcCxVBr4E/whc1/aAZWdLkhi/i4KimVL0MC3HGO1Y0USdbXlNkx5UdGaz6hTtxGJ6kEgKfDHB2a1d/GnlqYT%2bbwRB4zk3WpractJD8b9FzEdGM5Fm27/TbyEZM9G6NU77s14G9zxaxpHXuTGWXfHDV0KWTf70TqKlbeQa9hHxnbLvpWgWxC20cmpBbwaT3XkEefgeOUhtdMBDSffOYchIEnI96QrIjyp4IbtlEkxSuqlGqObXY7Zl0BsfOgv76DPll0vZjf7qRG4T64Dv%2beBvhnxSkLNxn9IyUzYzL3DsGwuh78PC5Z8OqVUOlkYR14I/r4u694m9ueXRJYn/yWvcBkVUcnBVMKRDlNKxUxuKBGqWBrwLrOE5G9GFE2czbOutjUy2v5jVQlZt6IVWE2LtCmd6KWull1hZpVinRAxCayyJIYzGjUHYcuooQF3YCQbLsG49IM7U/eBO1m3%2bJk1T%2bWyXgdC912jc/dtPHJ6wUObjq4cK7AWuDgcMtF9HyBzrkpWkEXyTCRqJWzSEe0X9XPDZ7LKotN0UErWsVmK0culZpKkdnUq5EA9fPTMa62ezjfJapXkQtzODhryGcn/eEJ3mXCQJC%2b/uwCOxMF2NcC%2bserarD7h7VylKFUi0WbyjledHzp%2b60yk%2bCh2%2bOMCQS0r/dU4CXSobrGisv8BCXF4XOB%2bTB/kpJ0KDBYdXGpXcI/BJieojzZgRsC2jPcLFUBJcnZty30JjEmXSaiArOR8mjf3LLw6Abw/l8//PDhJx//2x/9lf96CdiXAOI12wNL4P6avbSvrRP7tvd8cKu6770/f6mXf9d4mqIoK2wNejgodjGo14WB4lKScQ8Psep08OI4FBvEvKSNYHsx1V1tVDg3sjFecYWlJ%2bMeHHLaWUkYrH0bo7U2%2bgdz2Kuq4Irse7cFa2MummxWXc3SFNQGkyFPRfsMDFBhaNvoo8LBji8FjBK/C4/FXCprYVnHAyV5KQD%2bLOBBRwzenCwawzMLK8W4s0iTOtMG88oX2HCmJDDybrMwi7X2va4xH%2bdwmWBIaQk18YaJH8%2bxupliOhsIg84EVdG464JKbKNo3bWWVHbQSMLj%2bvmYtouqf3j8fKjtdNSMOkaWC1dlZ4JJqUO0Fhr3u43QWKRHZNUEBkkQJUmucoIsllXBsW1JFBWMp50w%2bXPD6n6R56h3I3aMXFncaLod5EkuVSV1q49lSuqwsMIWWhOKkwAqM04HB8Ziv6H8uO20dM6kvmqqrdI3GsTfCbSbHTUBulZyyU/NIICfB61Cklu7brUAyQTtTGA1TLyaybHQdVRSK/9NiEU5vDcsUAxU/8h41w3oxCVaKw7iQm2XssCUmRK620W802%2bNwkjUvC/0R3r9NiuQSjtreCy8ZEqnmuzT2hJpkxmPvrDnemzqfciQY94IZxCY%2b2EpDTubPepEShqj7yHmywzCjiqyNFWBWukR7DNY1sGqTkgnCKUG3cwImXElw0XbmMptEpWoRw5CAneyz5wt8BRw/8ItF09/McUTt1RF0/veaCPP6CQDbPZdTPsTXEyZ8GLhujcF7e/3J4r534wKkcDIMWhjWlXYDGwMvYEkq55rKRBNgp/s/HZQ4VqrKxatpWXhAmcXNkOUBPq6YJMw43SI6QG3YjU2nzty8fYLBeZzCLBm13cOpthpc%2b5KPWNcekyiRrEZIGeOUQlsVDNEAfXtalQfDXP0Ixf9noOedqIZF8A0KXFtpiq1TufAuajGfXMXzCgwVroE6qRPyLZfcme4WXZEGkNde3IwhuPY8Loh7rts4aUAf/yr//uVT4VH//79S9D%2bldyUy21eTT2wBO6vpqv1Om4rgfuz17/u/e/6zsf%2b3niaoShKXLRsPDevcGElQhyMEcQ9tAJKQZRfOaeyhWX3h%2bhbHaX51C/4%2bWaJ9g0LycBHz68QHuXohAXihIlPJUb9NvwW4FUp8t027HVTzEe9/YtdF/7lFpIXC2HfM68n4DwLQ6RXS/Q3MynWRDvDoz0fg/UMbcfWhaFsZKV4VIhv%2b5nArckMa1casmAOq0hOKvFRJ6g2JGaHEpdaMe1k5ClzNwBc6X0thN4Ih/uB2D%2byKiq917mIH7vWt7eZvFcrwMx98Xtq5AnQubRESgMJBrgswDv/YZ4mGmlKSftJBXpWs230wOdCAH/6nLnusFaJqMKoo8BsUqHQQUR7kiOLVHt5zmTch1PFABpgTA8Nugzqoo8KeHP63ujamXRc18gDdQ7FNJdqm9wBXfLOsmBUumqA7ommYC63bQYHCsootvAOap0z79wmoH%2b5W7u53yZgb8pmDEiXy613uJDbNKwrydyPtYvNRJdKjVqleLlzNAqQF2a%2bFmb%2b%2bNKaursWPKkWq8acceS/qwyneYJaT83CUFqJoS6UjBe1YkQnGs4QhPQUrJBou0b1KyvUmqulGfeGB7w5d3Ex0cmiPRHVA2NWFOZw9Hj9GTRX6AYdjEtjRaQLLNWl2CxGIaFjhZhlPsnc960FcJYdahleHR4noi5mFnSQKzUlOpyHs9F2gU%2b95ODgBQXc77vQRprW6HYLzOYWzq26uHazwPamCqDc2sZOMIVzzQfuSZUI3UhfCLjZl5QNBhlij8mtNfqRCizo776lgbyw3zrPhQC/XA0FuF/o5gstPIE%2b97cdATcmwAr92Utgq5jjVstTCeqOBWcvg7Xl4Whuo95NpDnnIkdmJITcV3E6rI02bo5qrIXAajaDF6k5HgYinz6wELVU1YxRAXzdRo1LsxZSnfvCWGxylGHa6y4CeAL27DCG5dD9yIHXDXDv/RZ%2b5P/a%2bYV39T/3%2bPVnr31qCdpf7kmy/P210ANL4P5auIqvg3P4nvd8cOvPrn7d%2b3/o/X/l7332T3KZbr15MMHF1T7GHYL2CEk4kb/W%2bgROliNLVuCFhxhN1rEVJagKIBl4CA%2bzBnBUjg3Oto/gaLZAPA7rhTOZc1%2bVEXRXCxT7LeTnXLRu5rDWCoSocLTvIQozTCYeBhszHO53sL01x24B9KoKqd%2bFn04kijiqW%2bgx8VIDK5O0%2bnKMq7m8SjNqIZKkWFsYQSaX8lsla1GJpVzMvwWg9zqLZDriHbLxXDraMWYB3An2uR%2bt%2bSZw58uabH1OO0gCdw2kzTZ8Ubd7LeXhfgr58kU7jUsEtMvTJ2nUNifOmYBN1lM7mE1VURUvpA0mE1JpyzkXTXt7Mlfa/8hGkdSY2WrqnftT5nfHlSO5Yh5RSqMkPQKUNbsoYLvx9CO4b6Y6NtQzYundKEq7YPcZJDQLfd4J/P%2bH3p6mLaPCRt897rlmH2rcuxjXwi6bCQqHundVSZXnqJxsLITM5Wg0jjHMRFh45orQOUjtQMGrGhMCeymBq1rE9WQ2SPcjpThmuROIN9IMyefQ%2bnPZhkmRlMjw%2bjNS0onZ9FpvzjKY/Z%2bWmHF/rEysTY20papay9xv3JHMdJBxr8aiu45YBdVUI5IBwXNSyaAijTEnd2psmXEkGvxaWT7Kcc64mcVxRTPuXhv4w0%2bXeGEvw9W4jUvnW8hmBO6lFF/aWnWxc6hclNjnynCVjw%2b23FJFh2oLz/enuHgYoN6eSzKtHCO3serNEHsrCOJ9xP661Lzo0%2bFJS%2b9oI0twv9VSfvHyv9VQwP%2b5nnKokXyAopIiT0Kc2xb2E1ZjAranM5Ep7UcduEdT3Jg6uKdXKQ93jhQ9FmQGKq/xYivChSgHHSpXmK/DWUenxpd2HPFzp45%2bpVdiy83xSNtHWpfYKVuqWi/vbekD7XXjOALcvb4qBnDPGy2Uafr4//Pbn/mFhx9Ye%2bGH/qu3LBNR/0MfNsvtXxU9sATur4rLtGzk97z3g1uf/NKFv/O9P/gd/zS5VuBwlGBj0MPRfAd9awPTQFF1fHkGSSSMEyUz2WQNrfAIPauD/LhY54Lpk1c1C56s1diKLRz1W%2bgf5ThYaaN/pGQi3Je7pjKtin0b7maJ%2bW4b1noOn2CjAhKfUo4KORFeZaniL3QRiYF6PYJ7GMuLl8l/Rm5CsOEJc6hemC%2b3cP9Miu2VyrmlE1dwyXpWWCSTHu9DO8YIM5%2bju5ohnfdQTGboDNqY0bO9IYkxVDGlMhqVyXT4CRmDqfKqWfa9KggAACAASURBVG7pbwKm7h2AO/P9JhUCzQASetB9hwmlXE6Dd3HVZMKm7aItlis1vJAafCIu4x%2bo3UVCGwllQ9NjnT2BO6/lLFDyFi%2byMZ%2bW6jw0q24eeAbkkx4sIlX1tXYsAenU/KYNIH8WcDcse/Oa/XkZ95e73hrPiiTGyGDIlp%2bW2JhgqLk/j1rjoCWSkmBeSrJnICy5YnLZu7TbN6BY9tlStp1yE2kQflqTb47RtKHURWclEVfAPmVglMM0GiZXs7LQo0SHTjgE7mTc9XHcKa8bnWII%2bY/LCd/ttpDJMyau0mYyBnp1Jfch7yUWMTuxLS94yvUrqXXA40Z2B2V9avZHM8aSl8t1THElwyTr9gpY164xMpZPN7Shgzd9Rlv1IOrg43%2bS4tNFjfTFCue32vDDAkVuYdB1EBzluOpaIMAfH7kCYMMeXZYssFrpc60UmweRnHdvtVTPtNISUgLnctS5saktURYVgtU%2b/PEBxsEaosk%2b4s4aBl264iirxnlRY8OeIVuJsJ7EqDdCVLemwIaq3Cp9zKzv3YkEv%2b5WBGt/inYLOJjasBsRGoPtG2nruEptAWy3MhQr9JzX9fBoeGXXeKF08KZWiayysDez8A3rU9w/dTArSkx7kQQAreEQ9WAF0wOVmJsdsg022l0fD73Fwhefmd34Nz/9W//9xiD/8Ed/5fuWmvZX8kBZrvOa6IElcH9NXMbX/km854c%2bsvWRT1h/513f8Vf/KaUcfd/DuNxHr96UYkTT7gRhHMk7P%2b7pJFXLghfQYWYdTnCIFXQQ9zyERykqTrdWwNQw8GSeNip4LLRiAYNhLi8tAfAHc4UlDJtUA47Wvpf7LTjrubwEvUkt%2bkyCH5mi53eir6gxtlwEYsytNLfG05qVK92kghXSovF2CUnzyi4kAJWlij/pxK%2bW0a9rVpxtXSSWik4%2bV9IZgviJlgQ01qHkho4NC616ry1SGmrhaQkpp61BmCSeUsfeqPhD2Q418icYdw3C%2bTJv6oF19%2bDIUrKYE1ph4xdPBn6q8g%2b9gIDdEgBuNDHt0MFsolhJ8sNky00g4NFakNvoJZ2WcHRxFn5FVvwEhVvWaEVtqQJLlxL%2bxuJPnSRf7JebNJl1ymZI7sq%2bTi2nnChftgLqCbB9ap8LmcspVxlzCuayGIlMkz1f7JfdJlUv64UUhr%2bZIk0nJDXMHTgo0VlVDO2dNPjmGk51cqMB7mZ99tU%2b80bGc2Q9JY8gcW005tSPS%2b4GxyCNUKCcdngfO4GaOSKLfLdFucRY6FcVRpUl4F3sGmtq05We/TZWnvIf6t9qYJzPRNLRc48LdEldBimepNybpJ/1TkxRJTNeTyfanm4udeahXyJJdSBiUS5jwSfj/mclnv%2bSi1u9GRhg9fptdHxaQAKVXWN7VuCJmw7abeBov8YDD7Wlr472c2Gp5fpJ3QoLZQ6sbbVUkkJu4frKGG/KQ2HACeLL7Zkk03IHkiy72oU3PsDEX5M%2bLvNSGPkVey5WuqJ717lCW8Fxfo9I0mxgJ3bgdyo8veeg0wI2VxwcHrH4lfaWZNEzS83k5IWN1b4tDL/J5JF21QwcLGx7c1CNd3PQxXcXGSK/wlEQqlkFgva1FXHTCVhcTworOXBDDw//devGH/3O%2bOov/fgv/U/Pf/oHf/%2b1//ZbnuGyB072wBK4L0fEq6YH3vwt/%2bzbH/2G94mXe9/rYJwfwul66Jc5smlfNO2T3hgRnWWY2LSaID%2bI4IVDTCar2AoTmZptAh/RYhL4rwTwD5SERlgmLUDe9IE9A971d4drHazuq8IsamcO6rUcXb4c%2bcLSAmiX6E6vJPZ33P6UsFkASKWm%2bfmipT3cy5Hv8mKFBu/SWH2Y5t3cSCJdsOYa2bGCqjDu/TZm4zkcVV1JLUY/K39r8XOnDIaAvSBgv9sTw2jbqTX3lT2kYfIl6CHbBmBoufDIcBMQazbeHJ6Wj2ToLctBpgs3LWB4U7/SGLUnkjc1olLpmHQBcZAl5aJoDDvXC9V3BPzSLF4E57jKvZFUyA70zs3lOy2NMV1mGHgjl9F%2bPLILfvdKtO8G2HIbtouAfNAuhck2Mp9Qu9OclsmcAO0MfA4LeKuKXee24vduswIo9e3ubdaSi%2b5ssOTSZs3KNzU1/J6gnYw6g1AD3JtBwKRhdE%2b9ulmoqbctpZVnt0fmeDrAy1gtVwJZ5wTylttWj3V%2bZODKZEtpYlVjGijpmIh3KB1pjA%2bjQ1czXRV6YQdH%2bQx9Uw1V75tAPtSWq7fFDdrikVr2kJEQ%2b3Ssb5kKMJ7t8g2diNgvROVigFMhSR1JTvU7wB99tsQLV1x8cZYhsm30enRkUUWf2G7HsXB0MBdgLOOL15AFsYZqIJFtH6xpj/gC4hIjibFMDl3vIK9qFDkw6JHJd7RkSk2zVFtz5YrDdTQjP89L9HTCrTaowWaHUhpbZmZE2s6qyTZwULaQTHK0WzVuDQNcWp1iJ/ZF0sKren4lxYtHgVzbC72pMO0kDW4devJMPt/PJFDguCGwJyey3U3xPQMXOy7Fh8B0f4Tu1gDp/khkOlIZ1bbR2mxjb%2bZeeeqjH//glz/15O889bG/v6yG2hzny8%2bvmx5YAvfXzaV%2b9Z/ow9/ygW//5v/sff967yg73%2bvQG32Eki9iax0t/xBZMoBPecx0Fc5ajHyvCy8aIpusohMdYl7aGFgtjHse/GEmL9ftAHjW9RAOFX/qXWoje0nJRYpzNcLrBTyydJR5rLWxcjBXoEAjg/mFNtyX5rDWKxQ7HdTrM/jGd09XjaTlXU4G%2bazsRw0ICNzp957mxbF85qxLpoGO%2bE2zwiBYqMVGX0SuwDSiz3xDE2TcXkTrriQyRAKqOqrSsAu4IBAJXQSTQtxh6FJjijBRaiKgsvG0SEMX/oRVYxqN1EA4nZQIqKstgaHjYmAXmI4rpXU3CNNsd6rwEPdGZo/e7HSNMG1jLCTSZwFvaifUvHcmyk8%2bJ0s%2bUTp4suVG7cE9GEZeri//TfBu2qq/W1zSBuKTfSb5AnVzhDRw5omkWNMLTZ07r5E5TR5XrO5e6W2o1D2YVMqKcdZvybkbqQydYs5k2M3%2bTwFwgn9%2bRS94LnSfuZN//Ikmksg9LNBZcyXAFLadEiiOtYmPIEplNuJ0sKlYeVUsy/StnE9ho9sq1fGp1%2bf1p8%2b3b6MlgRqp%2bQoWmXftJsMW00KUrPecUQJnmjibNlUAPaMHuy6uNBvN0GrYnopGm04wQVuqoBoVjgHtBLFM5hbQzH0YacxZ18kkouqO55lx99S3i6xEy0G4qcwyeDWSlEGo8uEUxr0DfOJzJa4%2b28KTVSaJmiuRhULdlsqaUbPbpkKpgPYjoKXdXPurwOGOCg5W1o5nBaQCL4E8QXkJrK61hQy4uTrG9o0uhpd8zON9mZG6eOBjfi5DMavhrfZEC18UtXjUD3qOKqpUWdjycuzMlfxlFBfw2xX2CNQdYLs/w17SQbxTYvWSLXUweN4PDif4Ui/CQwcTPNnt4nwvxe5IF70rLaz1MsxzG7zcRdvB9wY2LlwEbuWcndGFlSwL6XAMv9%2bVK7G9ZeELB7jS3/nET3zk977w%2bDIJ9ZU%2bSJbrvRZ74BW/R16LJ788p1dXDzzy7p95ZOOv/be/GFnzxwZtG3E9Ej/jnrUmwD1NVEEhs3SCIabJKsLoEMlkFe1gKC/YFaclzuGz0pICJTcT4EII3NKFjy5oVwW%2bvKIqXwB3Sj/PddV0/NGKAvHGH7mqbdG8d2L6tzdYc13UJp%2bcBO4L8thUdzR6XwEl6hiBTXeIBjwjwxmXytqxIavhGhFZx9CBpyuWVo3Kk3ybitOMZvcXyaT8wswANAG1MJOKbRdwT/BvJDLmiUGN7WaG4a5ym2ABJp8FmE6z7mmhdO7iBaevjAaVLFglchkN1hcIj8DSceGx4JFVS3VUAeO6rZSyMFDhfr2erTTwul3CBus2GDmLOU0TBJhTNQQuQbUJxuZhC54B69Iw1Wbu4yzmnKtwe7PPsxJUzTrGctIAWW7X/M5YS/J3b1oiDx11eAPCzWzI6RN5mdv4mO1XCaZmeUXAXV%2bbUe6gr5NVZQbAqcRZZtrzpertaYabDSc4Px1gnJgdUWbp0vlZYCO0Xck1kNPTbjJqdolBqrKIMiCdY8Gb1iIZodTJgPxmOwjE%2b2TX4xRRwCTUhVhHkfesjrri4uiwQK/vYng0R7fr3D3fpHEA7j8gaBdnFwPW1QqT1EUUFEimys%2bc8Yjv1fDbNn7/cxl%2b/4qN8EUb71jzcPNyimpOqVrjXtfHIXgfHQKtNvDSIXDv%2bvEMG4/PBFrpmgpYXwcO9hQbT6kOZTTUwG%2bstVDxwcck/MLB7uoYTmsT2%2bMJyo25sqvkbN9aT0mUqPsvgX7PxSG9G%2bnfTncp2lKmtGRUI%2bhN4xhXVrsYvDDE82Ef901jXPG7uJQkiC9Hyhu%2bAs6FM%2byOSH4wl8fBRjfDrLJwkFnohRW%2be51FrzrYKV30JxMkUQR3EqOKughCGxftGhfeiRs//bPXf/dTH/rIB576yN9dMu2vrlf3srVf5R5YAvevcocud/cX1wPf9p4PbNmPvO/D73Dw2I26QGs0w0GUYtN3MU366ASHSCcDdKKhVB6kjpKgki/E6WQFnfAIK3YLL4xCnO9NkJcWc7DEpm2SzJBYLbW%2bRlbexQ66%2bzMciYa8RnYzR9eeIYqUS8v1CdC%2b2EZ/fy7TwFXpwNnIpeiRaGyJlo0UQ/uN898iXWAhl1sd9DcypPFJzXtrqvTrqvhM4xblR8tBEdODvC1uGOZVL%2bCmVFKdNHLgJUoTbgCpeKyP5sohZtTQrevLZX43V0/sJkdKziJacg0euf0igVWvzGRX7lM6roHMbEM56%2b8EqFsFkrhCqNl3to/7TyecaLfhk2DTgHlGfYokqBq5y3FfSE5BaMNo2E8ctzEETwNpgknupasZaykC1GCMyXgyCU8O3TidU6emmHu9TkPBsfjewGOuZ2Q2zTuDI%2bp0IGAAPtdLxcO6ERE0GHSegJuWKLxTUzjNdRoHOyHTuctMx93u3OY%2buIu4JmOvZnkWum8j%2b6L3fZJjdhd9ED3Ibdpy6gFMqYW%2b7VQzZGpFscoE7UzK5nhq%2bZxhczEsC2HcOR4FlJ6xGOtXymMUcD8ZYBDs8nrLMXg/3sEVxuxaMK0B7t0SVuwIwPW6QEfcftQ%2bJlMHUVBiMrUR%2bSYR24bjeqJb/9DHa3x8Z4LuTQc%2bo8sccM6re7d4wYJ1iYjckkrFkh/uKqkMrSSvHR7Luy4QoJv26EH44r4C9wwkegMmnzI6rHFzI8RDeYanmJlbAm/MMyEx4q0QnIjY7h2gEsagwri9phJzp/sYB%2bt4aBTjmdUu1p4f4Wqvi/vTGM/7kZKfUS/lWLgvGeN5v4d7khije3voPhtjck8E/5kxxpeZxatrC5QWzvVSfH4nxKP3THB/7OJdb/Pw/M0MTlUjiULxnOfS61t4sAf8w0/hw/c//8S/%2b7V/8vX//G5jdPnbsgdeLz2wBO6vlyv9GjhPOsvM3/QDP/%2bNIb7ruXEBd5ziMMwkYYnowYu7aIVDFJWFgdMRALhfz9T0PqfaAaw7LaVj14CD8pmonqETdiSBaocFC42Bian2SMvD7TZW4jlu0ZlCMi4ps6klCUyS2gyI04wm5StRmEpGq0ynU%2beq6ehk4qEbpKIJlUTVSPtX66TV6UQBefEQtxxVbIasuQ2ErouSFUtqIPNsBFrGIiBngTCY5GYLE2oWYafpp97Qb7D6aWFcZMyKhoHXZdNXzmUY7viwLeVCsZDZjHNxpxHAzuU0stUNSiMXYaqlO6eeNieSVm0LqcxWVMKycckSMpVMPFQyD0lQ1YGMFLQJCNwrXVHx5AA3mNGAa6NNN2C5ybYbW0fDx1KWY7zgzfZnqZyaR3w55v0EI603PME%2bN3Ym8Z4FdKYanBOoJyUK6r6JldISue%2bIdnixnNK1m%2b%2b5K2rlWa2VbYhZjIyf76qzOfthwfaedplpnpfR9UshVDLieje3zVTwfqqqhZ8%2bHYBGvhrLXGSfPP%2b4RNpro1sVKg9B8HyNqW8jupsbk4BxdYKSZMrHQ0l/9uNEVB5EAHvPwWhY3l0ioxvF%2b5EMu3ZLRXIE1L0SPlx0WhUmiYsw0GNdJhIqOO0IZTYRAUir7aEfWvjsn03x2WccfPnmHGuRjZt%2bhfMj6r5rsah82PPw1GAKl0BaB7b1LUdqFojcrgCuRyW2Jqw4ATDtQdQ4F0oB%2b2TmybhfWAVmM2BloDzd60Lr41c546h8H79YenhrlmK4HSCvbFwaj3HNj3ApjjG8v4fBC2NM39BDvFsid2xcJkAPe8KuX426GFxPAObfVjbiCz66LyWIz4cYvDjB%2bEIgVVS/3p3iS90QDx1O8NQgxKwAbkxt/P1zM/RWaqz0PFzdm6pHiGWJRK6/GWCzD/z6Z6pfGOx/8vF/9Y%2b/%2bbfOHpXLb5c98PrrgSVwf/1d81f1GV/65i/9/H/53oe%2bY3e3OL8/TrDV76HKK/FwJxjpF%2brlR/tH8t7Crwoio9q2wvXYR6c7xJrVwY18hg3Xl4TVTXG3IMupbolpkmFiKUbwXKiS8GzLxs6Ub0kLfWQ4KD1sBLrKkyZHJZFso5QEu9HERzfKBHQkfkukJEa36gjTD7SyCnFBHSz1xxXiuSr7vnClYbn3ooTXFmdj%2bY9VP6kJ9i3l2GES8syFbcoLjpQj8kKSsrj4TZq4CboNElucliUuEQIYaR%2bpf59P5lLBUJa7MKsLqYdlYTpWnu7cRRbrQEI3yPSLYCTt/qhQiwLt1LznXaU5VxUqa/ihI4w7wb0cp9EOgkUDvqUok05APWvwN8GnxsyLQKwZADTIatnNKTWSfLcAq2bmRgPkpn0k2fROWmIeqARM85vkNLNCpXYfygNHaZ4bjix3FbY3GHcTsp0IOGixlxTIw%2bPqqH/eh4HpDwL40zIYE/honCu7NvEBAyc5Px38uUFLybEkL6GD9niOuRQRq4RhH4nQ20KHchzmLfhMwLTgxTlcLY05EQw1gmey4t2Q%2b9dnJ%2bOFMPpYa2SSXbt9xZrL72dFV7rN/MnX96VZj8NfxD6UpVDa5peYJC3R9Qdk2mV/KoqRy2gBqz0fX3x%2bjI8/0cGffqaFN781wbM7QPdeYD0B5pUtshU6c14PVSG0y1MHt1ZLpFeB7n3AduLgRb/EOXqrWzb2gxIu82kKYCt2cVMHDwTN51cU%2by7a9xpYWwf2btFKskY%2bA9ZWmItS4Uulj4cKVqQG4ouhOMFcmk6w2%2b1ib4cuUjbe0cvw5U6ES5MJXgxCXM4TjEYypYn4QoDBtSniiwH6LyV4ilUVqgpbWy7yOdBftyWJmM/hK1dK/KcXa7zlgQp5O8DhzlSubdCu4fUDnD9n4ekhrnz29z/%2bwS9/4s9%2b56mP/YOlNObPe6Mu139N98ASuL%2bmL%2b9r7%2bTOvfPTP/qf/I13vG9e5Of34wTbTGwbEFkrqUorGCKrLayyUiqn2IsZ2qsuukNWSfXQG0/x0jjE%2bX6qAKBmqksy79ZM3FokSS1UFVR3E2VXF5K5p8c4OrgQVriRWNgOa%2bRk1grgcK2NVSOZITVuypcKELUQ%2bTMNGywkoZLJrPWmytNae4bz7d7SntRilccqqZaDSVEK0%2b4kc8x1IaE5sysJpimrITTQdpL83EMp0gLRBR9jF/lk2Exz4q5xi2mgUElOPZqj3etgFs%2bOfZkbjHvBQk93oaENhmSfke3nwgJLdLMgEBVvdRVRLYo0nQZOdJgxNpXU2KrExRrtgCVZgFmiwH%2balPAjF/OEtnTqhM2Zyz/p7R61UNLb/WXazGoAoWaMTd81wbsB2RJM6OMYNn9RTZV64FTJmBzPOWEbKRIbgvNMDb65Z0mQZgpC1WmJGQF7Mw6hVz5ZdgL9Jiq%2bw%2b1t5D/82bTzdGxlZgjMjIKR/twlBjtxtKYq57Tsx%2bzb9McJz3smJAYuWvFMKuHymnct1VeMD%2bnzz7wH0/bFCF5U5axV4bDmYNHseS9sYTyZo/JqdO2OpMaO5nP0G5aP0n3UvvdcHA1VrQCxJ2TAEDknZyIawa2ZoSPj3jw0mW32MuV4vI50kjHuMNyZ44UoMwJTpcFa6ft48XqCz/6xi4/vzNHPIhx4MTaLSOwYA6L3UmncGLTxittt4OphDVfJ5cESbmzDGzdcPLtHlxvgaglc5voXtXSJDi4jF88HhQDnS0z/qYEXdoF71oDZXElp8lmNjTUHn6s9PFymmOdkBioMt0Pcl07wp7GPbrvGU9fm%2bLYLNdK5je6gxE0vRPdWJkWZVLBbCfP/pOPjLWWK8bYG/5MYL3QiXI7J5IcyA5D0Xfzg5Qqul2PeCtS9SmlOr4QduTeyPq7e%2bM0/ef9nPv3FZSXU194rfHlGX4UeWAL3r0InLnfx/18PnH/nZ370B/7B173v6vPF%2bf1RgvO1hWwQot05QjZeQ8cfYl5bGNiKcT8oZliTl7gCj3zBTFYCREdT1ATYGgvVFa3PLASYCWzwvI4wzZTOnA8t%2bS6eZOhFlNSoRFa%2bjLcZMxiKmwoaqlFYiCaYYZLqtEW%2bhNcLFHsdREEqACVOfGxuznB9t4NzvSlSvqx5jLGH1a0MLLZKeQ3dNdKCTjMuWukch7VKWOwETMyz4BIAEiiWlTir8I2u2FYWhCoxFABfIoaLHl/5BNKxcngRRvIsJpoOGZy92MwwYvKpRnOig6crjUFVd0B5UpwnLhHqSqgE3wowKRgmFVWN8wxnN%2bSzKpzTXLiebCu%2b7hQbqMDDo70MAbAw05bSuk9KsbVMbEDXuNK9oDTmZNzb2hpywcwrU5PbnF6oqT9IFCBSPakWgtwmCG2CXvM7/3rEPmkJRzPqzd/EgWWmPBol%2bKpVlc7TwJ3DkmCd7C0riSq5l/ZZX9OSGSOlaXRaE7Sbr89KmOV6CxbcuO00ZhHudkc3LxP7z28UrJLrrPdn/O6b69tljRldmlgASJJOFWhvxkrymTUWwpMOSZTJMBFVErbZaYZAZ6AdtDCKZ%2bhHHYyKGbpOG8N4jj6Z90YAKzp17SDT7zoYxepu6XYt0Xw3F65LxxiRqrGNY0dsHxfe7gWBuvptmqlrchK4mzPnvVbB6QTodSwcxXM88Zk5Hv9MjXNWiFEQY6uIMKPP%2bvoUtQbuZvAxKfS5Qy0JsyxslRFuWhO8Yc3CtYMaHGbP1cD9GrhvJRae3KsQ3gNsj1280C5xsac6%2beoucGldSWj6K0A5JyNPa0iy8Y5IbPg8o7Xu2kopwJ0GP19%2bIce7L5bI5jZ6KxWut0MMyGrYwGdbAb6uTKXC6RdsHw8XqXLw6pWynsWiV3LJKuwnQHCuxH9zL9vjIGupUmhvCS3sXMQNq4urn/io9eRzv/Nz/3jpHHO3u3D52%2bu5B5bA/fV89V%2bF5/5N3/eb3/%2bt3/1d/2TnJs4X8wJH9b5UTqUzQscfY%2b53YI3Jsingrt64wNEgx%2bCIIlF%2boeAaGfjwKBPwvpvP4K%2btYm04Ut7UgQLdSZKpcuXhotYmkmQmeL8btXAtBi7QEUb3pWD40kYYqEJH05RTxhaCYCZgnbr3SeLDXp9hLaNHt4Vu18bNmx2R1UiZdacS320uBO9sLqUxXObp8SkErrLbI5DIOkoPz6Wl5Qc8S%2bqDpW10%2bRAxKsESKzEeu1PIl00Klf/W4L3d76CIddEmvZ9XMmw0Oa4STxko9BTbziCADHzYbSGJcwHs5hoZhGykMtOEYN2CH1ES09CyayZUALk0tYYf0Pe9Ukm0jYCCH7meAGMDzPRTTyrXBjaySQW/5whjv4gOdJ6DeUCeBunm2Hp4ySmYYzXs%2bxddxd8WdpLUf2cVRhnQ91SuQlMPLsFIVuLQa2NlNsfMc9Chxr1RWMql64yR0jQuSBO4mwRb1gBr6szNOs1zMLtognxDOJs%2bMBVkCfgNE87CwXajYJUZRuZ8TstZ7LKSAldhI7F6sU6D4W6ORzGfAZl2lRgttqajDHRHYkM4XsqqEmeSeDKTv8pB5nY/96aunWBd9tyMA7Tlozm%2buU%2b4N1Mp9XbgbiPJ6E%2bv/NRpAzmZWogGPkpG4JTKMDkTFlZ9IK0dfPLJEp/8SBtPVgn6/Rrn665IZPy1TOQqMq5MwWAHSPZ8DLYydV76gvDPC4c12k6Ntra0pH6cUsHtIsQNK8EDa0p6M5/bcM5zukPtlzIagnSC93xeY7DaRlmWCsCvlTjYddCid3td4am2jzcXGQ62A4Q3UnlG8UnyBdvDo1aqLD9lJrDG5x0fj5RTKfDllDWSLR9OVUmcFc8qPD8E/sevtzEYqIJvrm1hc9PFow8DP/az136hn954/P/8H5Z69lfyjF2u8/rtgSVwf/1e%2b1flmT/8Lf/y2zfe%2bd/9i/vX8Vg%2by%2bEcTZH3I7Q6Q6DkVLca0nOrxqrdwU6RYd3SoHtRqEixtwu0pT9WlS2Mu8hlFFYQrBcGHWH5OD2vtNSGAa1kOvtorQP7aoyQbKBGcmXtIAwyTBNPtKVReOzirbwnFOtOIK%2bAgIUOd%2ba3USY5prUtDJZuxiIRUSQjOseU7SXIl83LGo7WDfONWCRz2cYJVZvaifI750uWsoBZqJP%2bhMpt6M%2bbSOsEVXo8XAh0vaYn%2b8uMJGOMkyaquBIlA9Ss%2b1Ls5vggqbbjVNVm1WISVCmJmVE64wBFUsANXHi%2bI2y9sL5SYZUJrNpsvNEmnUss15Pb7CclIspPuI0%2bfpYqy7sm6Oc/jdzDaPUFkNLDXAcNx5zqyU44NXkguzXAXXah%2b71D5Mvj%2bDY6elaBB6DkJ04tROwLrkJvbgZvBE2ZktPoWkwLICeBSMMhxwQS3AXPg2HdWYy8HrKLNpozaQL0ZpJvk0mXfmnQ5RIskDk%2bWT9JdmmJD7sLOsowcdow7Yueo3WqrgJc6CrALnXv5mbUCZ%2bLqEGDdoLrrox9tafhWV61CQAAIABJREFUZIZ%2b0EhE1QeQBNWei%2bGwEIad241GJfoMKrWfvMhdekAyUhsRrE9G6i%2bXyVD9LosutESpTRhUSIwPqchvVOVU3qNc7E6AIpvC7njo%2bxb29mb48jMFfulDPi5v1Wi3LNzABGVu4fKKTSMY1WfExDZQPGmj82Y1Vqb7nsp1AcSVarrvo2UBO%2b5EmHsWYAo3U8TXA1xHgvAycO6QAN6GvV3KzEJ3ACE7KPOb5zVWVlri4a6eJWqMj%2b/xsXKVV9vGeNvHdjrFcKiejf0V5g8BR0cmmQMC9OXpa1NBU%2bFLtY%2b3zaf4TNnGKAXaPQd/41yJv/72Duwix71bHcxbwEv/n%2bLmx3/sl//2uY3sw0uWfXE3LD8se%2bCOPbAE7svB8arqARZhuvDu9/2Le7p4bJblsI8SzPtddDpj0ZVTT27ePXyBrbM6IhmmQQJnGKLk36NQCWr5Cjol9yi1dkam8auZsO%2b%2bAHeufmwnx81uTIGLASU0OcJuR0Bgkz0keO8GrMZKkHB8q00ST1xuoihDPPHVSz7IMC%2bBrVDhlCRlkRsLjq1ekM3FdyqppsnUNQJ3KbwibKUqNd6Bhbk%2bXOYpv%2buMuuKsVMwutdUENtTRJ3NxoBGdtdSl19GNIcJPI9Cm57pu1B2T%2bs4YWaq4kva5064ffkj2zRbGXBIxKR0xmaUC8kv4XRezhoZdTqMEOpS/CHhXSMeiqWQTgHN/qbpu1JvLolnVjn/MagpwP0P/vhgeIn%2bpZd8zamGMLl0dVKQxdHox35/RbScYeYXm1D41YSlfzWQfamvRweuFchleGwHrNnMbdHIrgzLug8GY74DFOs%2bKtwzw5u4MG24Y%2beZ3zdvhNCNv/q0na858btCysR2pWYyFBknvlMB91gDu%2blIsrokpWSBDV0mtRc8%2bG83R6bWQ8m9XzRrJtuLT3hagruQzDJBddX1Pta4pkSFoHw0r9PqqIJiRjPkDID48BunNEgqL3TUrEqtHgrQj8HXCjG67jE/zlY7mJQnWpoTExziZYzKZ48f/dY0NJ0TWG4Oh%2btqsh/baBLMKuLAX4fq5GJPdAP3ziVz7bD/ELgF6GSHYTJB9yUHrzSWyvRA7zgRbeSjJ9t1N5WjFvjR%2b7tY5XT21BN6w6%2bP6falYQa6sMJg6lZxL8E5XSoL0vhqHoyNLpIArK6oYlhq4yqOe9zVvn8mQzyygU1d40upgPgP2phb%2b1htTbKy0cH7NQqvnox0ATzyDKx96Cc9%2bT%2bsPf/apP33xUx/9le/bOXNQLb9c9sCyB070wBK4LwfEq6oHHvnOn3zknnf%2b8C92itljUduW6n70a6e2nUWWQn8kQJnvyjXHw615ihWbiaqUiGSIa81WCZD37uiIwu3LyhEgTWDAHYpcRrS5hnln12lUYpjjJnASxzWypBbCcCYgPQozSWSbJB1h4RU4UHIXAve%2bXaPlO8inFXJd%2bIR49jSm5PnQLi/rthHapSkmeva1NEBGM/WeBvlZ0EJ7mh9bLMo5AmO44sPNQIjs9%2b3ac4Jv7XYiMiK1jpHH3G1AGeDudx3RpTOplH%2b1Yc5iU0pY5Heuxyqq5kl1Wlevz80LHKRxAU907Ao0Sp8RB2clbCa0NtAcQVRH5EfqyzsBd9MgAvYyUy4fc59jrgGAbcBPqd3mr7VUALU0iD/dF6ebL/p9fW4tDcDnvgPiwOOKrxY6mbIEnWu9O1tN9xky7wTu/MuLcBq4L9rfaIghyM%2bS%2b9zt2p1WU53%2bt8TBVSUFs1w9ruZRC%2b0JxRt6Bquq4PvKtZ2JqCu6AJfMJNCelDkUZrCTgTeMu9xXRMnHLVRgnCFbjV7QkZmtSldbXaylE1d5wG7fxajBtnMdM7ZlX3rfTECdjJW%2bfeEgY2u2vd/QCWngzsJKEjzLQZW8K05a6IZMI9WyIuq8OyGKLMXAZ2VTG7PSxS//ToGnP99G69wELcfCLAcurbIKKQuxqVyISwchnrFKuLRKdC0c2hM51/U8lAJevY0p8i84aD9cYXQjQLRJnbwmMAi%2b50B1scIDewGe6U%2bFUWfwUpQ1HoGHq14h1VYl3tV9wG4crJTSThPAjI4crG/k2N9roTfQvrI20L3m4uZKgbbjwLIrtKoaT9Vtqcoa9B18k5fg8mYHvg%2bcv9dDNwKeuokrTx/UH1uZ2k8/%2bdGf%2b7%2bXTPur6jW8bOxfcg8sgftf8gVYHv7P1wOPvPsnH7n33T/8i62yfCxyarTascgtWCHVD4aLqWn1CiUjVsNadRANHQH0ZpFkKVKAtyGpBjDQ4D2CcoQh%2b65kM/qNbduYTDJE9JFHhZdi4KKurHrirGjxpsH7wgN6SoYeAugNeKcnvG9VCP2WsMjMd2O9QeI5TkM3gYao9AkmNavH5FouLGkfF5ZKKBUwQc/r45mAhVRCs84K6Da03YbkVbVYhPk%2bBiWqDSwGQ%2bBOOQdZbyVtubM7TLMv2K40qRFQty4Mur4mWm9OSpvtue2yHGPs42tmLidBTslCTc3HmXLrmWeVSFSasg%2bNr6TvGCBwK9HH38VxhodPtaOPxqBgAMTvyGt2xLyc4N0Ry0VLa0WKqZL1nOgDrbs3kwpGjqNx/7GAXG%2b0cKEhI%2b%2bxvfUCtHMVw7invgO6k57F9p%2b%2by07r8W8D4S9zWxoZUbNfeTvl%2blwZEFaN4mGmr2VWSjeweUnPnCZoziRxdqjrau26LjxU1%2biFbYwm6h6iE5Tat9a3azB%2bDNhdxKMCUY92mCVG4xK9nqMmmUrFtMeUyPC%2b5OcjJYvhmKVcJuqfCmJVMVIhDgK/UgmorRCTcSbSGQa%2b48RFFCphud2JkM%2bmCJwaXkfpSv7oS8Avf6iE1a6wEkE8zi/0HfFdj3d8dLdToFVheujLM2C8l4r142S7xuY8xJxMeW2ju57JuUsgw9k9nbtbFBXeFAZqPd7mnJEsLezfO8XKMz52LqUYdF2c23dwbVBIzERmXywkK1vA%2b%2bGBg5U1FVyPhlyjEtZdjmPVGE8sdBzgcK%2bEVZZYW3HxydzDLK7xvQ9keOSiD3/QwtY5C8khcPFB4J/9yys/vf%2bF3/q5Bx88t/sbP7dk2v98b8Hl2q/3HlgC99f7CHiVnf%2b3veeDW9YDP/Dz97XwtlmrOD8uRujVq3D9kQaYJ4c0X4ADbQ2ZD6YLuYx7FCp5xUIofHZHUDrTxRRHiNCvUgF7qviP0s2rWXAysVoacAfgJE4zwrorxt8hyhFpugIOZOLJyHfCGTos466DDHKVVMfPCPQJzMOZSAgIxk1BJ/Nvyme4NPEnp7oD9R5fLCeSE/mCV4qB2xY2kRKbbk1GTv0sjPlUgXay3FLghoGTlkYEoUpCNW6Pzf0eu8nQwpH2kMrKkR3i09ZRqqfqKq1N5K6PLVp2BhpSiEnJU%2bR8PQftzkm9vOjodULraYvIxYnq4EWlKp9x3FM9QuaeCaGdlLMuNRzfQTktF647po/ZHuWtf/aYaoJmOXBjyN42u0GQb%2bwj9Xp0/GCAYDHhUeFDCUzucsjbr63%2bhud%2bGsTLT%2bZYJsg443QWYN%2bcZ12jYDVUsSk9nsmRca6DwDvKqs7S90jSqUpKnY3nC%2bCuJDItHI61iwwTUnU143m%2bA9fdEqG2aLl7LsbDAlFXg/b1CaqM3ojMZDFsuGofA/KImnay7dSxaw09x3yiv2u2X8A%2bvdunSnYWegXsToh6liBOW4h8NT6FddcBhToqELQsuEz%2b9C387C8Bn3xyDjez8ebLIdqricy%2bqRsOSI48BIdT7LVqrG6yMhvQ3p0iXvMQrmU4txfixmqCrd2u/H3A7%2bDphLOEFd4cBvjMaIo3BR6e7k3x4EGIK4MUb9zzsXtfivWnfRSP5qKLv%2bfAxdWBKnbVH9Sif2drR4cOegTuWuE2GlsK4PN/rg3XqcRmdf%2blAl9ejXB%2blOHcdo23brfwwFYtyaznL/vIE%2bBzL2RXfvdXP/S/3nsh//ASsJ/9fFh%2bu%2byBl%2buBJXB/uR5a/v411wPf%2bb/lP/WG0PnPR7PifFKOMC8qbITtE8ywwQEEkT2nI1pNlvSmXGYCWjrWKFcI5AOxTW6iJ1WP8Hgha63KN1Fuo4CzAu8%2b%2bsUYR04EWwPYu7GdYuWsX8bH4FHbMuom0I1hJSKrpuwR%2bXIkCWiAOxl6Z1Sg6LugVn61nCAlg8h1DdhlIxpsvEjX9QEVL0wd/HHiJb874bWt12Wu7ITnSfAUKjlPE7gLE1%2bbSqeNR4l4t5dSAVUqtmpWm84wZNoVAtDadVYDpVxEy1vOmgCRvo6chca9mJZwQ8cUUZXrTpDG43ARfTU1t4LG1ckQvHM7gu0TUYq5lqGNOdtwFuuuwbXalYVSs%2bsE6AwepJCSZvX5t2BAQZWDTiY96wYS0MiAKtNBjtZE21o/39xGjmtbKCl8Pjkw4fgqKlv8Yqwo7yDVkf7RibVGxmGAO38zjjgyUxC6kh/Ahc42t81a8IfFvaASjpUIRk0HLe4imdm4XXJ1OrBZ2I2aoVRrqUxpMhh0PgeZbrrIRMcuMnEyQ2RmwzTjXvJ%2bX5lgfNBDtDpGPe83GHl9w7GGKJ2cIq11p057rAB8U%2bOexCe/WzjLCOVuIfQLxFNTvu1Y807G3UhmmpeOzxDHtrHdr/HMYRv/y69OMb9RI1wFLiGEtzFFofNiCNyrdo1wN0W6oe5UXu83WQ6enJcYbGaY7IYI1xMByed2Iry4nuCtHR9/lkzFPebB0BMgvn9vivXnAvm78YyPvcspqtwSP/c%2bbUa54xK4cOAivofBFzAcWRj0a4TXWkjuz7H%2bQgs31wpwiA33ChzsAVcoI5xWuPiWDv7W/QV6PuC6NS5e8vHiNnD0aVz5gxjP3vqpf/4jzz3xY8uCSmc9FJbfLXvgFfbAEri/wo5arva10wPf/g%2bf/6k0u/wt918sHkvKGFbYQa/IF8Cd79JVx8N%2bngpgX3U6CJFhLqIGIEEHTqPmu4BxDcwJYuK6I%2b4ltoYeBo6sIMUBQgH/lL6Iprau0Q19jOOpeEkvAJQREt%2bt2wT0aPcZ4/nuWKgPx7C3fKzoEuhTSmUIvtl4bmOT8VKAjwz%2bZneKuGrBG89w6HSx1U0wP6qV/t0pEM8ddNsl4txZyGaa4P1M6z7dbh6SoPi0HpzfEyg3XWEEFCoTCpWkSSN0LRxuMpVGLmM82hdsNwMKSmiYbCpg3VYVVrUe/rTrCy9mkSgQz782aT%2bpcHvSHeYEO38GcG%2bznUz8M3KZBnCUFAWdQOrSd1207pW0T/7N/qH%2bvEGbC8wU4K6DFK50VkYnu0f78MsqjDc0EF8w8XocUSAjAUNT08L4h%2bs39/8KgDtXN2DdXPvbWPeTcZi0/6xZGfZbW8aB7gHaf05K0AtfXfvjzryNbW/q2tXElXRUm3aP2lWGkrZ2xGqkFbKjAq0%2bEykpWaMV5HFKsrnNjo/BBEoly%2bl3XYziAlHkHmvgKwdoHwDzNcXOa0tI7ifsH7vKsElk3%2bW5Eeuu5vG1bEZYd6/EJHUR%2bQWSTM2gnfBzbzwDuJ%2bY8hm/gNX24dUZOm3g808B15Ic//Y36eVe45IdSnG37uYUw30fb207%2bEJd4i2WjetrCeZfBO7bDvFkVaINC6OdFP2NQBxiwo1UElSLgjp24K1hR2R%2b7AtJkBVwbuHgvhQbTwW4cV%2bCRysPc8oKK%2bBaVGJA26UaGI4tXIpdJPfmiIc2HMoT6Xi0U%2bCJuScMRv%2b8i/smGbbPW3j7RRedDomACve9NcD1K8CvPpn/wjfkf/D4ylb0wmeeSPd%2b4%2bfevUxC/dp5nS5b8irsgSVwfxVetNd7k8%2b/849/9NFv/avv2YyKx5IqRlgN4Ph0laFlI4slKXmMkrEoHSpV0wFN8ahXRQeEAopeUvrzYpChN1RAbDyosHJkIXboz1JjIFIZpUgm817ARh90i1EvQ8pFmpaRAiyiXEC1SGLuoKMX%2b0lWVK3pAV0hpec7K5CXNjx/hrbM1VsgcKdKmm4yXCZ1C95kjrzroBUXyLsuXJ2oKqhGQKKFrta2J6Xxr1csYmSZIk2qb04zqbfNGmhWtakH5yFOMNyUa2gZi9Eus1CSAnHqMXMavFNyw2qqdItZ%2bKfrqyL%2b6gTtlNA0PdzPGvxNoL1AcA3wrqqyL7zrTXRlJDImhjOAn8y8VLMNHKnwqhj22xeHOmUy7BnDPtUIQkkGEPzlxPcC5E9plgjcjauMR6762NHHfO/4Nor0ODvD8SjKOgmhxZmGsgXuv/nTmUj7zk%2bPZkzwip4xC6lRDUuzwwZKe8HxDA1nXc4qsCXXQbeRNpDz4QztfhtzymIi1mNVSzacodNrC7ju%2bS0Mk5n8HSXKs52uTr43wiTticuMkcvQl5xSGSak9gcuhke51Ew4HofaIFPPWAhgP5Ke5HzcQvNO9p1SGZMDQRvFoKF3N/mwKu5QZq/MOQmDYhHwnLwU6npSYJfOHJxfqTBKbYwKFx/9dwX%2b4AsZHuyHsN1KiqyF51KkX7TRerhEckvX6SU5bgHRrQz5eR%2bjW1P0NwMpppTnFu6vHbTOqwRzHuvpSSaB0YOeh1v3T7H5VChs%2b9qXA9y8PMXD6OBaVODikYOXeiX6obqS/estlXjK%2bhCOg4M9VmyqcW0zwoMT3sA1HglDVIMSa0GNKAC6Hc5OWpj121eeHNcfc574yOPXnr22rIL6im6q5UrLHnj5HlgC95fvo%2bUaX2M9cPFdn/7Rt7377e/Z7uGx/fQI/UMXOF8gGQ8Q%2bCNlYWZ5oo8t%2bgnsYYR8kKI/UqDHtllJ1BdwJYxyRQmNYt01%2boLl1IjJzMvrVQE3Mu9dsOAINcwKxC%2bCg7qG79N1RlkPlqUjBZUoZyFYdpyT8hu1Q5O0Osc0bcN2lLMD188LCxtRJmCFVVVN9VK%2bTFsTgvWWgPZDO0Q3zEAtfmc0B6X3hy0q5A28UyyxHysf96zLcvGqsNNCTnTSKOOEF/ji0pvCNEYLTiaUFUu144uW8Cq2W7OnBhhrIvUEAy%2bAbEq/cutEXCP9SvZWM/Z3BO3sztOyFoM8RZpxnHRrpDVEIpw9OGbybcyoq2/shz7vGeUhDVC96APztGxIkhi0ub7yATco9ISkpuGQcgJ0m86n0w8lPMb4/BQLf%2bLWY79QStOIIxhgcEaAX7l0u6Hjn56FOJsi/%2brdzB3fOAOpvxJkxSX8kKyzYrul4NaYBbhur4zbHFtsq9trYT6kll2B9vlopnzdZWbLkpg08IcY7vlodV3RuY%2bSHJHf0UEZCyAZ1X4lCcv9voPhULna8FpFjQq9J1yQNHivawf93iGGw1UF3rvqITEdHwd/Uj21eTvrcWfYdwPS4yl17oVo4EOW7pW4rJYKqtTBs9oq2%2bB7FrqdGrPSwrPP1fjAr5XInRIP9UJYzKNVBDnaOymyrQ5c4RssdHZSpNusE2HB202RrPuoyLhvZpjnwP0tT67Bs0mmPPxr4AHPUwWecgu796R4wGrLeLoVVrLOxbGDq1GB80NX7svd1UKKOx3dLLC7D8zmwOEbI1yepLh4wcKj512shTZsp8J2N0daddHdAKxNXPntx/ee/dzjv/ITT/7hD//%2bV2/ULfe07IFlDyyB%2b3IMvOp64J3f95vfj9Vv/y%2b%2b8R3t79rdKeAepci6ETreUBweCMAJ2le0h3vZT2AJeJ/CHvoLwLdSZhhzUleKmdjo2imG8DHQZXdENoO2hukKuNfytudnpZdvgnfaqwXibKEgq/J3novXcZJ04NDk%2bsTiIPAzJIkHx%2bVU/BTdXiCAQ3T0FQvwzORYLORkMSuRAKS0EETHztytUYG856pZBUsJe1iRlUvk1phQFiD/tNAZz0VCw7ZFDCaMPtqADw0/z9K8n%2badKQkXQxlNsbdDXX2UTieUShB8Ndh0qYDJJEUWYVIydyVP0UCfDjdiAam16ncE7dxHeJykapC/AOCztN0NRr5NYD5WIJPgZ6413CfArpbaCOvNXlvYvVioyb6zOw2Dr1ljA6gJVGkbqbJdT1lkNi7/aQC%2bGBZN4N4IEKinL9JCyYEaiJznrFxr9Ng4qU75C7m3F045jWDOHEiuYVxK7gNnXGR4aOlUQ512e7uMg4xC2PJ7WweZChCPEEtSaa0Bu6rmW4wKOF1XfrewIcC4KHbhupvye57vwHG20O9ZODyiXEbdl7x%2b42GNHqU3XFFHniZwpCWkyIP0j5TJmITVZk4BA1VxnGFBI51r0QyYZIYrqBBPFQKnFp4fCNoXwThlYZ4F360R%2bcAX9lz8xP8xQ1aXqCcW1h4ssV2y3rGyirEqC7ecCc7VkTzn5pWFBywHL67HuLDTVXKX1QnKwsabQw9fTKZ4xA/w%2bf4U9%2b/5%2bHJ3ijfsBti9nOINaMvtcyXPMRkqu9PBKquntrF/a47RzRrPkw3IK7Q3OvjW7Qz39tu4b83GWlhgRK/2OENVWHjoGzyELeB//okv//Ts%2bpeeuLSRLRNQ/0LuwOVOX%2b89sATur/cR8Co8fxZhGjz6vh/6xrfhu567dYSiKrAZtJUzhEaX/DOvatG3NyzWlS7dAXrVDMNBhfbQFzaeMhm6q4zgaRxYo48pYgQil1EIzkI4HiHp08xZ%2bVLQKvI4UU1LZkgGj4aYRyvwKXkZzXHg9mDbZLUUerMtR%2bniu4EA7WQ6E1kGjxQEBNbKLV6SVUt6L1YYuvSaBCJfBQyOlsmQPd%2bJA2x0p5hUJlFVdYQ7KQRD5t02WnEuoL0Tz%2bH0HORHJdyBg7h2sDqbSwIiPcjpWHJW8ZlmVU45h9PSbaPrF/mQ7rLTrPgpJxc2jvsRbXt8XAV1AdrN%2bLyD3OgEM97QfBcTAlpHAP5kdw43ciQ5NVhvI4uVE4xJIqVGXgIB%2bsnLdVaONcKCn1pEaz6rEGdAL9TnSZMbMuHsj6xGPFO/8ZtR0ljP7OsU2F8cQuwmj5NQxbVGBxaiqRfZzLEsR66B6OxrOTcuUmTKsPhnBDFn2VN%2bxY%2bAZmJqehyASTGvZjIqk49jBkt38dusgFa3jRnlMk3GvdsWrXrX7wi73g9dKV4UhWTl6Zc%2bQz/siCVkFHI2qambMtGoqr3AAIA6d3FCIsSno1P7EMhWAU//ZXCtz6uuHETdIQoMFvkut/WVLhwq1VW1x/tCS17TJrLANFXnTd07lyRTRcIW0hutbmMkG7ZrrEY1PnfLxh//UY0//dMWRmmC81GF/nYobSdwV8WWepjXJYLNDEUBbB9EuLE2WWjY64pzBmp2gM%2b9NwnbbuHgYooH0cFTxQwP2B1J4n62mKPjAkd71MbXeP46UF9oI1xz8RYvxTvu8QSsu20KESnHAWa5Jds%2b8jYPhzeAnQhXPvFrH//g6KWnl77sX/FNtdxw2QMv3wNL4P7yfbRc42usBx75zp95pP/Y33zvNz7Qf9/uboHWUYqDbQcrnB82/u1k41Bjze7gVp5h3fakeiqOIoROJi/nqYhC%2bFK3ENWKwYND1qkWAN%2b8OXpIMYYvLDGXaDRG3B8giCewukx6UzKMbuBhPE2FGQtCT74jdF4px8h7LUwnHUF0tIKbkGEnxSaz%2bxamU9UGccfQZdNl22KCfVfVWV8tJsgjF5PYQxSmmEx8rHWn2JsE8MNMijIVDe17nHoipYnpQFMkyPptkdTMyLqTDbRL5GOFHCSZ1VLgWQC8BoECSPV3AmZFxMv%2bUy4kps9f0TBp4ipWxgyVxp2AlADagKZFIqph1zWANcegfpzAXNomzHitk0G1ewxZ%2b%2bYUAY/LZFbq13mZ9bYS1JC1boBcJpty35pvR51qppO%2bmhqcU16z0C2fAu6UN3Bpjh/l/d/oIUkWrI6ruRqm/fSGehMjyTmht5fT5nnfHtWIPMicw%2bl%2bMM04Kbx%2bRZevuRIB4SLPoQHcO%2bz7hl/7K9qxBN0qMXU%2bUnIZ02csqsRTCL0YybQrfu1FsQfH2UBdHsB21xBPUvl%2bPt/TbLuForiprCG5vU7OjNYSjHZD9HrKwvHENWFDzaxY5SwsIlUhJhXskXk3cjBzX3AgGBtJxgRk5qUGQkvJ1RRwJ5vOJFYljzmrZoD4rDs2PLeG7QK7kxZevAV86CMJ9qoab2wHIqfjyLplJXjjho39mx4egItrg6mci7oTKhSFjYd8D1%2bMM7w56ogvPCUy%2b5cyrD3r4/CeFBvP%2b9i5N8P2FR9X1qew5xbyOaVfwNZFC3/lgg%2bvXaLbdhGEufTHbKaKj/E4a%2bc8pPvA770w/PC5bnX9kf7h4x/%2b0L9fatlf0YBfrrTsga%2b8B5bA/Svvu%2bWWf0k98Mi7f%2baR/n/0d9/7TQ8E79t5qYBzNMXRtoXVolx4ufNFz8qpN/MUa44qzMJJamHIdWpYbHsyrdyTRFMLR5KUamPkeOhruYxQVhqk8WaJ4YmUhttymzBO5CVmwLsBAmrKvYYfeGLrNsgnghKOnC5WizEOW10l0aZwV%2bQEtrCt/C%2beZOhGnvwNQ0%2bA/yCPRQpjFLxDK5RzFVA%2b9XGhO8V%2b2UJnMsfQidDzWdanRmtSSiEcbjfrtdEZzpk0psB7vy2zAQTzbPdaPsee28ZgNkcukgzAJWi1LBS%2brT4TkImjiiO2gga8iLTGyK/vBAi1Hpv6dUucXM6wKqFLiZHcNPGouLkogK2gCxlzFWRJsSNN8YuUhbMRPm02T5qPG0DOpoo1pA5MxNmFW2nWnJ%2bpG3cDG6WcvwpUmqz6CX19Sab72HFGNPPG89ow7mYdztSkygFnkYxK2Q3boKcw%2bD3P04B02Te16/8ve28CbMl5XoedXu6%2bv/dmwZsZYAYgQIEAiI0URW20TdG0KYcsW4xKZFSyxVCWopRFReWyU05VKlVxEtvlsk1HlZIi2TJjlyjTjizCJERIIimApEUSAgYLiY0AAcw%2bb957d997Sc73/X/fvnfeDDAAsRDoZoFv7r29/P11973nO//5zsciWNPUSN4zSQfP1cZDrplxmrHad2sZmTyuZkZBgL1Jwl7oUbb2kEmwBqhuAAAgAElEQVS2Yht4scNtqniYz5k4EBlv/z2LUlcPZmfJeO2rOcz6CtzH3TnWNkboj%2bqoU88%2bCGS8cRxKUapcp3hbwHytkpPmTMr7OwiDc/D8gzIvFpGxb7A4NUCt6qvFYSfA5uYAvW5TEywy7rM1M49Gx5ldhOM1VKsdBLH6vhO003I1DdwloWCn1a4p/G5oEyfbdVXBuHlO6Iu%2b3IvLPPv6OS/tYB6j5HpoFiN0Bi7OTYCvfCXGt5%2bbITcqo1KLkC842PIG2KRUhkp8FqKvq9PVoa0qnt/Xw1sKJXGJebo%2bwVs6RTzRHOEt22XsXDPBgWdLaF87QftCjGYLOHcamE%2bBQplkg4errgKuqRVwTcuBnwtQLbDZkjaHIsvOhV1Sjx7K4cQET3/us0/fPTn1rQca5ck9X/x01kzphZ6l7PMsAi83Ahlwf7kRzLZ/1SMgwP3Hf%2bnj12x7v%2bJtzmV6PAo9FEodDActlMsdkbGQcWfn1DW3iFlzCG%2b3irI7QacZo94xGo0IaDdjtDou%2blERNXei2lYD1nZbEdbatBixp8miVWXjG%2b4EXUcZ82qkLjNLC5MFWrqFE0wpgpVCV/mJRiPsYdepSvGrdbcZj6cC1AkMhnTMqJaElS%2bSuef5xA7Wgx52vJq0lq%2bVmIQA/XEZ9XAgv/yOE8OLI7RdFenGrotGOBBpTbIITtWS2zQBznc5pV4tAlPTqjVHq0PPwWgcY17NoeyEKvaxnvS6K2XkCT5ZiFtKOYqkvMHTMhBFXcbO0AL99F87MMOU0zlFtfCRMMkE3rmKoiD%2bW60XCYBTlolS1KjrJ2A/XQhqx2416Rx7YvGYPkFNwlSWstC5L11r4wjJGZneaCGPMbeRXmKJDf3iyYanZgQkodHjMSEytYcL4F7QaxWtAvcYmAmzboG7wlbGQvA4r13siJvNEkAX4G7iiRTrv9eTvPoLYW5XzpSwHsEuaTBL3TWlR2yoVRL//0tkciYm3IdfL6irTC2PWV/dZabdOXLVnCR4lMvwRquU2nCd/SKNSYoIEKJa1lkvBjEI2ITpKr3BIrV65Ge1mmbg/V4o3VN1fVMQbp4Epri9boB6IycMM5Pjck1noQisxyuMu5yCuVVKdJ/pLuoayLzvJTlLh1nAOh1rUnFmYotqjLLjoZiP0QsdPPiYj7ufGiB8zsGsV0QhB%2bRou1gA8r6L5oGRKZBWgoIzfdcXimILKWHgfzPtmvrYcARn5mI2BaYHIgHsBw%2b5uK1cRv3gHMfWgfVSjNHUwTRi0SyLUnWAlXoB17/VhTeP8a%2b/2n/ouc/%2b0T8/kjVTetV/A7MDvrkjkAH3N/f1/748e3ZPxTs/9g8ODZ0PIxds8kcpl6fJsm1Go24vLZdst7pbENyz4ZLTrtDMRdxhum4J9UhlM1zaa5EAeGXeDSPKDy6S5hqG1nWwu8Vuhtr2fBm4K2QTwEU3jHJRfuGHw4n8spcqJTRmXfFd14WJRCy2jyO6QNBthS3GUUItGovsRqb7CSEMELLOFpHnoEkdPGcN/Coc6mAFkChcDR1X5DYcy67fQCvqJQr1hdGgGYYtVqUjSEwveFpPzsXVI1935NBUF49Z6DpWPTwJ3nY7QqOiAGFaoPWm%2bp0vLXt921wKzBpQTdaY4CZh0C1DLA2VIpEvqOGd6WTKYxK9kulM9N8xXCY0dH9ReL8AnNYfPeX%2bIh/a16xFNQWhEn8Lni%2bluTfJUBqqenmy5wbkrjrDLO1HA5RYSRp2XWQyHIMA7kVCsepoo1s7MkY5BZPMzEeKQPU8zN0mGn8y%2byp92HOhVt6uwwTJ1A0wtnYTevVLQXGNLj4muiJv0vfJgtPFZy8AK/0BagXMeioRa%2b4fo3O%2bZLJJZXl5Tj6tIUWKFktCzfFWS1047gbiaAuDUQM1NouSe9dkenKNybYDtYbOLHQ7IWo1jVK/T4cZ/XevF6HOQticZd3VhlWfX/XsT24ZmU4JpRiVIJ2LtZEkcOe1E7/3lP2olc/QUtJcUnMRTJOwPYJvcgr45Rglz0OtEmM6cnBh7uN8P0Bn28fzz07xzacCoFvGxB9KbA6YhJ2x3XZ6yE/qCK7po9xxEV0Vo0GbzhBoNjzkyxFuLVdw9GiAa2qxzAZQTjMOY4znMaZznQJi7Q3/d%2bBwAcEE8K/D01/4jUzLfomnJns7i8ArHoEMuL/iIc4O8EpE4MN//76/98TZH/3oHW8LbvV8gla1JlHooCBanWWKmNRHaHZcdKMiwrUR1joOdt2SusKEDjqtGK1dOsYYuBUTxMfi5c5CVi7iMBOWUPMoQTGLqiPEmYb7EmbL/MY3gik6FIvyp59sXzBFXGtgMNTtRUZDMB5BQHXIOfgwRi9fEfA%2bHk1lWt4ytgIaRSYQo0KZgBxLz5YSGnKti86pMVpRH22C9LCLtlcXQENg0woHiFyF9NteHRthz8gLVq4S8WEcY1bLId%2bbC%2bPv0wObwH1ijmy%2bPeSPYd31OqT2tQpwSeAbTbb4kyeUtLLd3FQLKC2DbtDbHlaIPOZFLL5xuEmkLUrUKhO/pDpPjfEyNZP2gtqmShyXJCSXAe6Xvd%2btHt6Oa8w9qzQm7fsuQ025yth7JpHQ2POUD/SIjklUognjai6OjdtekpjV6Zb0wAk8WTvA2NiZEXNd6cwzHqhHOb37BbiTYaeDEBwpTE2WRZ65cOIxHxJctjYm6GwVk0uTJ/PenSQFqpwXmHSnWNsYoi8APYdOby5/%2b7SCrND6FOLt3ijnMJtbjbvOtplUV%2bxF5dnkDFjNQ78foibA3UO/F4jfu5D6xkmmVu%2bg22usKKIcsYrsdteY7i03%2bjIFrTy1pUZhNhE2Uz7JbaOTN%2bh3QjSaOhOQfmzEtcgWrYqdrAuU4qTyhi5U01GMrbkDpxfh3DiPk8/M8IQzEWmONF5CAbWDARrlCoI5UM9NUNzw0SrqbEOxGKDE7sjmBhpPTOrnRhiO1A7SdR2UihEOtAr4jSdwz%2bHT933p8fu%2bdvzqa489ksliLvukZx9mEXjFIpAB91cstNmOX8kIfOR/%2bsbfe7b3zo/edBS3RjEZ5BjDQQOlSkfkAdKJnO4HZJfcIsqYiMRFfiENyKxGU9XExI6w7U3KZyzwNMQd2XmDS9GpR2j1TFN3caApodrtw6OlXHeOXr2GRqySGfqqW0TVCMYIDGivlky7IzaLMgFiQydKXQgqem4FnhvBhyNOM2msSfBB5p37Vf07tfsEkZ4A8rZfh9/dRVCnLMeBP%2bggqLV0/N0u8gcKUqTKhfIZjUP6K8A61hsgGAKzOoH7THT2ZVpqk221oNKAz/R1XsGaF90C3N52HJUCUwJWKTy1LYx0kyXJiumTc5EPehq4p4G00ZMvGhXp7MVFMwAvBL5NksEEgwtdXbi8aOBu9TnpKKS17lbWY9xgxEHmUkmEuVkYg0s1hOIN5JjmT3S%2bkWWvhCc1nrTH/dLFkniRbTX7SDWPEi98a9k5ZLMqleLwPdtJd7VLKoHosE9f9IVjkcwYMRFkQSo7paoWKmm%2bNOnP0do3wu75sjRgkns9onUiqe4NhMEOPH8dYbgNz9swibvez2G4hUbzgMhe7JgazRw6uyHqNVc6qQqA74ao7Ruif6Ei8hn4HUSzppG/mAtoHWfkG4X36aKpGs/LNnhKzyosecRf5otQ4%2bugXwhQn9OaUrOwLsdVN8U1PJy5DlE5RpGsvwORujBk7JY6dnLYHgXYPuvDJ3CPgGsbE4yqvsyQlfJ002HBbAA/r8coGL362A0xnXvyvUPPeR6LiR9BeyHvo%2bUAX67jHu8r93/pkfu/%2bYe333Tj1qc/mXU/vcxlzT7KIvCKRiAD7q9oeLOdv1IRePeHf//ncPAnf/pH7sz95M6OAncFaurhvuaVsDUfCeNOfFAmSCfgdYtoYYRdlFENp2gL227YXcSgpv3wrIzRWEsv08A97gQYNGuoOWMEvRl8FnWapRsXBbTLNinWvW1YdxbBGhwlmt9apYjBYKLgWZoNldAIeuhQvy4cuBaqWk08XwjrPxoLe0i/%2bISlcxyV4HDavkLNvRaU2vf4fi2aYVZtoEnAHkfYcbWPO9n%2btleVbRsxuTcrJ1no2EV0IF7Ty91PvYKHcEq%2bf8EO8wulP6aUwWhrV24AykbU0lATK%2btLLsy58UhPgpjar7yX8kEngA3ILPP9VbCbAsfJOgb4CNsvhZ7LjZcuuk9XwL/VoEt6cTmG3u5IQL/G5yKi355Hej97JEFpiU1iDWmwpH2dtoyU%2b8s0hEqDe3Z4Xe22mmSNJkHlHynYTVtIphIbAfhGaiOAm0WoVRcTw7LLfR%2bzj4ED7ZTqXaRtvwjMMokzLjKFRh7z3kz2sXCWKYrenTaRk/YMuTr17rSWnKG1r4wg2IHvr2MwDFAq7sJz9mMebsHz6OHuIJyfh%2bNtoN7w0OuGCMML8Jx9qK730N2uqOYdDgb9ANWa1kv0BdAT5IYXd1i1zcfMNV6V7tvJI5G49SjLufyNYkh3AciU68h3QRij2jDMgm2kS1Y8z2fGRWWqpITc9q6LPGc3%2bGyWcpjP2ABJZWF8MvIzBx5reA3rP2PawfiFkQB1WcuU73DsBO0e3USNwfz%2b/T7WbsbTf/w155nHfu9zv/vN//Rf/T8XPSfZG1kEsgi86hHIgPurHvLsgN%2bLCPzoz/7nnzt1cv97fvYT7/zY808G8P2hMMG1LWBnnxakEiDLZHkEzJpjeGy%2bJE2MKBtxUIu1uJOLFKHuuFIcOhxNsLsWYa2TQi72V9bIEowEVrZNE7dLcmF3AV4W3VeB2nyKsN4QYC32kokfNrusxsj1OggaLYwHY1SqRQwHY3jCgOmxRPcej02XSBJ26qcsYIVSmnIJQ1pSErBXS6rx5zj7XcxrDeX0YqAZ9tBxVGOv5KeDZkyXHDPa1MlI8qO5wsqcvnHD0BxEQKoAGCYXlPXbi52SaiS7TQFsGcPceIGbbdJdWC%2b6Z/YAukvr2OxpRXJiHVpEL57Swyfb2vVXgLtNpOw2KYWPEsXpg1PawKRmDwad53TZRkSXejgs457ydl9dVZIZ2mqmHGlScv6l1ZMGUOkOsSkf/ItimXrDNrEqSPctXnMTAano1mVkm1xd6nxW7yNzT%2bbqLEqdLbaig1E1j1KuJ3EbTuiYlBPQ7njrcq9F8RaGoxaqlXSBqm3CFCOcb8HLaUMmAbFiTROi2vBE995s%2buh2td%2bBGYYm17XlAmImHv1%2bJFaS3e5cgDmTmFKF0jZ%2bFkqn1mSxMhn7HbEyHcWwbYWONGjCDm2wgPLUQyyzaCa03DZyMM4HGA19FCoBqmMfkRNjkF/Ml80mHirFRWZbjjy0U4nuYn5Pd02A3uv72gTKfK8wEWAQrv%2bBHB59dIo/e%2bC5fzk8/egDR8rze%2b7K3GIudydnn2UReFUjkAH3VzXc2cG%2bVxG47QO//r724F0/87f/wTs%2b9sTxeQLcRSNNxt0p4Gw4wbW0fhOJDAtSJ%2bi6%2bm82YNptxmgQnBunDL4vhal8LwX4dpsK4i37/qLOgZ7hvRBOI4/WbIRezlDQMbX3uodWNEXPV%2bkLf2NrsylmNW3u5PfbijNqTQHujSpnAWhDWRKrSpLqTDLODmNsVgy7bnGG7N9IBiifMDaNMdvGO0A9nAuyDmp1A/4ddaWJgW2/JrIb7eITYdLMo9iRno06k0CXDaNhHowVBIgvdRogJwBpAdzJ2NfKnDFQNj6RUhgAbll7cWTh/iOga/wmG2T6X1TQF2BnLx8TYUIHQI2XgovBmyLBMRskkhp%2bZjTGlPak2X3pujmEFONy6Y11zEvykD1kMtz3nutewbldtCqLZyk3Ei9606CJ9p%2bmYRPXv0jaY5KatIWlSmp40rFYYdraA7ryiOe9vQAOMB%2bGqLRycozRMEC54mI0jPSvZdsFHF/Bidn9W603E8v9Y%2byeL4l0RponlXPYPT/E2oESuoM5aiUf/eFMxlqv5CVp1SLWbXj%2bfrWOXBlEEJwz3u5G/W4tYVJDFZvVqoduX8E5FxazioTEAGrpPCzNnBQdm7xZjknXGrL8q9IZ7oOLLZAd9GP49heYiWQENKoeenlWlkIawvHooxK5dl2Rh6uUA0SRK2NxLvA%2bjjEsu7Ku7cbaGeTRrM800R/khIXnw9%2bsT9HpFeC6MTzpWWE3cnDVAR%2b9ALj7rmc/3z/x9c%2bsNUf3fPHTv3D%2bCq5itmoWgSwCr0IEMuD%2bKgQ5O8T3PgLv%2bMBvvO9M5%2bo7fvl//iv/6MnjhnE3QIE2kE2nID%2bEbLrkdCqoYYoOSmAjJbuwoVKVHu5kh0tF9BoB8mcCAQI7a5CCVkECFoS9kCZ66TQdhK6L5nyEjleWH9SwO4NT81ArFdEXKY5j7CAVF1EXX5uNhBVPwIDBl8PhWICD/NAb2pZNougpz/OwdLf1n9dcRBE7dfHUxFeJWLsdY0oZoeMU0IymUnhaEQeSWGQzlNNw2x2nLvaTXNTzfY6xAHkWqyqomDZzKHTnFxdr0kKOn3XmMhNCaT6VQRw%2bQTxfC7FIO7wx/ej1LxeR8aeXFHO5eidJwpD%2bFqN7yB7dShn/7ghoMGlYBZSruvNVhcMe7H5aFsHz4j7rL5BgyLm%2byHUv9cSkmf5kHSvDEpmMnzjY2DqBpAh49f5NZUNLzjXGDYguNNSHJ573TEaHLBz2YVn3Ih1jzEA4NgJ3MtDpJIZSEDLwpdre7jI648RZI92TsO6dmTx3fq2AUq6L7nYRjY0xhjN2N6JmuwvPWUd/PIU0w2LtBf3aq9SGuOgPpqKFdxwy7TGCgAz8gaTuJAHwCoeTIvIG2ffdQNh4LmTkhYi2sjXzlSChW7kvCdTrNU9ux%2b7AyMFs4bCZibJH4187g7Z0HWNgXPJQKYXArjLqwwphu4NqL8CAPvRSdGvue0610THJfE90%2bzmsN6Zo9wpo1rRGptfPw3EXF5v7JLvemQRolnMoFXKYngQeaI7/df6ZJ56888bo7m/cd%2bbCXb/9oQy0f%2b9/urI9ZhF42RHIgPvLDmG2g9ciAnd%2b6DdvOX3%2byAd%2b9R/%2blX/02P0BvNwwAQsJcBcRuDrMUCpT7yhz2DGFqAS84gYTA506cGRnhpPreTRZ%2b%2bZ6qIQTdLyc6NEJfJfcIvY66RSq4k9uI5ig7ZdN2yRqyMdo0/ed1nd0nckVxHNdMYCLejBG2y3jqsIMuyxS7fcTxTmLW4kZRiMCeD1QnTr54cS4P4gASGQ0uj9HmXnjsMP3mMjwaJUSm0cZwpmgpNtDWKPpNOD1OpjVm%2bp0Y5xJqIdfnxsLScOsp%2bUul9R8W3Rv5Eo2ZFLIaMC5gD3NYZYkNlyX7DxZ%2bouI25Tshqy8YBcDv0Rbn96A/7ag3eiBJT6rO92DIX8x93U6cVgtyFzd/krWvdTtlfaIX1rH2FYmtpNG727XWXKjSW/IvNSw81J7kPYrNG4yiYTExszMUAlxL9dCu01ZiRRdZSQpM4mCsvEXa97tMMLQQevgGO1zJQHv3G%2bhppIZ7jpXLWA2mKp1ZF%2btI%2bnvLt1MHWDamSNXy6FayqE7nCrIrRTAGSYWqbrOPnkO1N9dgbzNNJPuqsbj0mJiO7ZLPvPs0VCZwx3klhJHax1pY8ZEgM2eKMfpdAM0W9oIin9Z1GpzKf4dlD3UBiGGZS8lv9MnrTwM0a/6ovTzrB0sz8QF6sMQ46on3xXdQR6uKahJHOqZdOhkikwZ6H2oRy7UfNx1Evf86K3x6faXv/yf/vyrJ59/9E9%2b/tEXc%2b9n62QRyCLw2kQgA%2b6vTdyzo77MCNz5od%2b5xYF/%2bzW3//VPVYp5iCWkAaZsl0KN%2b5n5GBs%2bnVccKU7lD1m3FaHJ7qiuWjimNdvTTR%2bF02xv6Irm/chugF0vL4pvPijVShEjosy9nhp2F%2b2aglUzR64OFFaDoT%2bUBM8tAvo82e8pGldV0T07EEkNx8m1a%2bE0IdWiegO57i7mlTpaYR89v47heIKGgHa2eS9hPByj55bkWC0M0UMZDYzQQQU1Z4KgN4dTz4v0oyigXcfk9Tvo%2bSXUgynm7NlOiY4B7uQLGyG9oa3PIwGE0tudQYgm9b2XkULo2SoatiCfGnmy6qJ/LykwJzBSfT4L7AC6ZcpuV/adlspwe1v8KoDfsPbcRN43I7XAX%2bQ5Rn7D9cnINwguzT1oZToDs94LAfD0rcuhE0xTNmOlEcnQlw6gswurx77Sx4DnapOUSzb3MSA%2bGAeJa48Ad7rj7DGbsOTgYweU6hQbjlK%2b8DbBsSfJItXEClKlVPRw50KbSBapLrHwDotLIxSpH7f7CHlr2joNdgI1j1gMYdnHkyZmfaObSnnbU0JjpSp0umlU8tKYickHNeoE7/3BDNVy/qJ7dcHAc6S2IMLeOZruyqFsG9zkrtKWsXJpjYa8tgLCZVU2Yd2RfkdaVmPiZp%2biZPLDMPnDiodqX3c4rvioDAL5K9IlRCgNdSec3xhXFhexQtBed9Hr5SXpcRztbbC6MInhzIdjAPtNb/fx7UfGmMbO09997PhvtU889qlMFnOlT2O2fhaB1yYCGXB/beKeHfVlRuCDH//dA48/%2bsTb3/oTf/eP1mpF0cDmCsq6i86d4J1yGWF7HcybYzi7ZdQxQceA9x3bcKkRo9mmLSRBRxFncxMcaQe4cLSMtedGCBt1eN0uevncxeSyRVHyJBk62uhek1MUmUwAjy40K7KLsDeDR6s7OKgFE8xrTbi9rqHIDEio1sSTWhg0B8j3u%2bj59HKPtQW7mXaXKXqUxDWH3vKKfx0B7/zhFngSKuggKClXSuJsUy0vwDw/s4C8Hg6xM4CAdKLSba%2bGDWMjac8tmWRIgVT7pbLrVtEK%2bibtWcgnRDZjnGdohrMX0BA5hAHyPFZ6Gys3EUnNCjjmselqY6UNNNmhHj0N3BfId1FZzPFwW4LGF5K8rN66yS1gtO/UuxNm0RVG8N1MAdlli22v4HmwCYA9zp6bLvnlpwpW95J7pbMiY005G84TFxmr67aJQsDOrxY8xkbzvpHHYGeGaiuHySCSngiWvacMp1he/qkR/fkeiZ%2bw7wfYiKkCOKGS%2bRGQb%2bQUOpNh785RqOeEkbd%2b/0yI5emTogvtHCr9EyrU4jsIgwuieycD73n79AJx7IkLDUExi7u34PNzFqKyO2sy3bCIco1sfhQmtx6PpYNbarCcbCshX/eA7TDpC8GNRxUf1SH7nOp9PKz4qI8D9KNAv2d4TjV9jplsi9uUC3S6eRz2RxhUfHR6OZP8Lrs7mYffKOiM1sdx8EPv8vGnX53hz765/fmHv37yK0cPPXH3o3dnDPsVPH7ZqlkEXvMIZMD9Nb8E2QBeSgQ%2b8omvHzh%2b/I/23/oX/ocvFMqFTQXufSna4qJymSLOz8dorFu9OrDTjNDYddGzjDuBQayuMoemZZzKTXB1ey5Fo/yxZCOl5zZyOLozRyenhaSEwHIUKUCdw6dNnRTCqTym6xeWSXn53fQQdKcC0mV8/Tn8Gv%2bt6IWvG9V4ucCRjWUGDryKJxp8usJYZBLVqvLDTgZOu7ECvsciNpXLrGEgzHsLE%2byiqADezDDYbqm2SNYCAzLvjMvBUoC2U5Wkx%2bkPUCNIS2hwB71RKEV0fVoBOqpbrlX0q6RL1pBFdQY8cT2bCKwy2XsC9hd5MxAsLbnWmLTJOGwK886wrLrbWFbdsvFWV0/5/0VMuRnLCq5dGmHir73Abhfvh8kV2fbxJTT2qT2m1FZ7RsLed3KDXUb7b8Hg8mBTr1alQYl2CnAKrHKOUax4GGzPkDMgfckuksko7SPLHoolD6NhKH/txZ4Y7/ti2RUgX6jwL%2b8XFs6y%2bRhZ8T2Clta7Gz25BaFWlaNbqd97RHeYUgGDoYJsMsqT7gzrByvo9Keol/LoDmeoVfisOQLG69U8ekxYaalqnlRaRfrefvQptTGzOPyoXs7JflQ7vwDzBO%2b8uUQ1FEWisa81ffQ7gZD06fyoGygQ5/PU8P1F7p66sYYlD9VxiEEUYODUsI6eJuqmgVXN83EmLqIZ9zBwqhJDjv1wboxTQcnI8SLtHmF%2b1fltQJadJ3T1ho9%2bCfiD39PC0yPN0T13ZYWnL/LbJlsti8DrKwIZcH99XY9sNFcQgVt%2b4p/dsu/mn/23x67ZuHU6DpDLL4A7%2bbCGWxLmrUI3GZSwFU5wnbewA6eDDGUzFhgkh3Zc02TIoBmCCZe69Al2/aLo08l4i%2bM50aetVDNdTLmflBu6GrT0Qym6oxUdmcg5vahLEfpitAyEg7nIUkR9W83DMdp3eSfSTqUsXq3HqvHVNqoRwrJKXKh7p4SGDDwdmvsoyI%2b5TgSoywiBO/3rWdBqte8E6x2fDCKlQCX0hmPUgjnGVXWXkY6rcgSVyei/InTZ7GnI4j9XWOpaSTuzEqES%2bHR6gTD12oZeJULVooLpvQD7i7FJXPUBT5hOQ7xbsETQLgy64h4JFY9tQT1lOhZdWwBPuYshN5c08VLQSgbd1Cinb8%2b0S8zlQLQ4e0xeHGjvmfXksi%2bMb5IrwM%2bbZaDDcV2h20567OIRb2YC5H619pXSvChOmmQJe01bS8cR2c3CpcWRbrQLnbumg46ZZZBrTKa84mHSD0U%2bMx7pOvw3mzHR853LqB%2bhzK68l8uQ5J7X68ZEedady1gK1TzG/RkK1Zwk0fmmauNzYiHZxe6FEtYPltA%2bN4JfY1szy/THqJUV1POOblQKoo9v1vLiVGMXgnLVyxt5meOgP5rrV0YcmaSVz08MOvDwAHK9wwBNPlfmee8GUzS8gvGP0m8Iec/15Zw4qzCoK%2bM%2bDmcYuvVkYqiGPvqooTHpolekfauy7/r/rGXpYhA10KhO0Rvm1IHGBQr5GL5bwP89wkM/HAYPTk9%2b98nbj/Tv/sbXs8LTK/iZyVbNIvC6i0AG3F93lyQb0IuNwHs/8lsHcrf9t/fcdBC3bp0J4OfSwD3GPIrRckqYNEfiELB6G1cAACAASURBVMMp/25UQtQcob6rc%2bpkp8i4S%2bdUymUcgPaP4ijjLncS5U83LRi9LrXhRQPcPdTDCXoeURTZZnZBnaJnALk9F9Hd9mcil6G7DDGIV10w7gTu0vjEUK4EDGTkLWAgcOJx2m4RIq9p5BGHIarFoiQDuX5PkgnCbClg84AhCnCcGNVeD4NGQ4APwTvddZR9X%2bjP7TjJClZmc7H2Y/fFXY/a%2bh52vDrWw75xnqljHxl96XiqgIuMuzh7WPWJPQ8Bgrp3AdQsJl2Ra/DlC%2bnmCZLb/QCtmn%2bRXpnHX5LS0J3GMcejJMdIc4zSyIAuk0wYa0t50wyerDxdbnQWRTXsF9k9GlkGNfn23JR9Xb57k4JUI83Yi2S2W1itfWKJSQC44oTDWyT53LCx3D5NTl/q%2bbmIzd8DKBOfukVH2PPhzkwYdVZqMAkSjbzpasuut3yfn5N5dwnq40i2o2SGx6IrjYSVtRVVT5s1iRzNFZ07GzhxmQwjFMnAr1aG7nEivMdYiDrr8XnRFdhwjQCey3SgbjRs2iQWkiUfg/E0mSHTi6/bpVVrSSgkQTPVKbEB94OpMvaOI8w%2bn1ObmEguQdVaFKEmwFy3FZlNCfJez24v2n1HAHsrV0B3PkXN9UG2Xb5bRiEcz8EknGIkwD1GfdJDt9RY1MrEMQ55Y5wJVULT5OfFBpzY2FWqMF/Ou7gG/MC78fS/%2b40T9wW7O09%2b6/gjf5jJYi71dGTvZxH4/olABty/f65VNtKVCBC4P3P6tv/9r/7MnR8bdAncVeNOnLjhFXHWdE4NWJyKiXig89e6EU3kR7u9xq6prgHtBM0L0S0VN/VgLkC5Hk3Q8YvCYNdFClNUYOKqVIaFpTH1tpTM0L2iz3/nMesowCZgz3GdPgtflfLz6IohIMJoFqw8vj9XqliQRSTSGgH6IkmJpBmNgJW%2bOm74dSNFocUirVrU4AOT0RgDh37NifLeFLrpvpVJd1CLFHkqrmTXWY1foVREPRgiYjv7pNuU6jMIPnrjyGi2XdQrrgBv/rUMu71U3G/ZNJglC86EYnWxY0ww1YpuPRETv0DzInv1lr7UzPnwBJk4iAunWtQvGkqlHGy4rXW5kVkCU%2bwqYNn8mww%2bMSPrJesVgL2uBMBx/XQiQKeQFLBPzsMy8LZg1gbEAFGOQWYCKkA/pc9fCostdGWCQW39JZIL7trKa8QmM%2b3SYzzghVG3QDu2HYjZSTVCjsDcus2k9N5Jx9bUewTQftlNtiOIFX/5sgfRxYvlqCZyJZHOkDVeaHYI3nlTX455t8B93p/rY2IyFl4r6t4pOePiE9zzmayy26o2NHIdD9PeDPlaTruGwpN18rR%2bjOlOEyDf8FEt5dEbztSlhqC7yiJXldAkoN1eM3NRtLbGMPCU1dDPPdTZsaqjDwCfm0GowF%2betzCCx2keJp7jQGb1yMQPgilyLLhGRcZdn/QxKNXRGPcwKFal2pWs%2bsKIU/fO/667OofAi3FfwTn93L86%2b9Ck8%2b3PfPPfvy/reJr9emYReANFIAPub6CL%2bWY7lQ9%2b4rMH/vz%2bwt/6u//0/f/o%2bL3zJeDOJkwtj8WpsTjKGFU6aGfMrqjNXQURqge1NhaLCIpUPvJEE/%2b2SSS67oGfV9ztOmiR/faKCPtzbFRCcakJu1PkmgVp3e7UCXzHyuq5QHvoqXbW5Ae5mi%2bAXKQIsYu1SiCsvYD7PQsIY2HfXQKRpNzTk6RAcT71KmwIo1SiNnOPJVmpdnsYN6sILkyQ31dEpT9Av1ZFpdvDsK5SGxbw0tOeAKhYKsm4KSOoRDPUjU6dHR2tYIbn0R/SN9sXENIdqiynRvBuGuFYoCmMOwv3UueVtkbkbAT3JeOIaXOp7WZ6I4Xi9RSbnwBRuy/bFdZilz2sHqVplGHdbeJAoMU8h4WrtJxMALvpKsnP07aVdve2gZRqmhbbcfRk9vm2JCjmm5XAn6CafxN3mxXXGwu6%2bTkHQr09ZyYE9BnbTDLvTBzSTj6WobczBALMbXMpc3ybBNji3ItIdili9RLv94VAX4/vlVxh2mWdlLSGN4jaSC62TdxpxqGub7cjk1wyAzIzDwLeyy7GwxClqofxwFz/KAJ18ZdcQoLyvCTHS5Xiqydmsjhh46WWBJhyG2M1yb8z8zpfJZDntVsUDXB31Me3hzM0SloY2xP9u7tkC%2buKw4wjyS718AT63FetXBC9vGjhTXJCQO4aO0bRu7tMKoAeAb72R1LWnhd5PYKzw2cmhuM6GMSqk5%2bgIrNo4Q6Z9jJ8F/BdFxvNAqZV4H/5X/Hwj9321L0XHvrC5x7/2q/%2b8ZvtNyE73ywCb4YIZMD9zXCV38Dn%2bIMf/g8/90Pv/6n/o70dbCrjrl1IGwTSwh4qKA0aY9Gzd1ox6tS1Ux6zbiQxYl2hQUp3SQ0jT6wShXAmA%2bbnBXzOu3O4jTya4vNeRjMcoetRU667IRvYKOs4iO4om2nEytj5ToTdIT2XDTVuro1Y4JGJp5SmM4fX8BH32NhIWUivxh956mi5wQKt8pgDv4hge4ZmYS56cwJVKXxNdXUcOVxnjOL%2bIqZbExT2LwDF5PwU%2bY085pEr4J0SGTrOOL2%2b0Pc8D4KJsFZTlw/LkoqG3EU9GqI7UocbKxepl8m%2bpxutL25CkXsMQ7Sq9N2mftrKUgjaTafKkWX0jTtI2Wjtjb6hx0JHgiU2pJGGNwGaVR%2bdfoAGXXBWm%2bMkCv2kf5Uwv1bvTpZ9dTaglFepCkE3h2jBdOJm46pmnyOmA451SSGrb/fFRIjrW3BupTU8DQJ0vraafDrg0BHHvi%2bOOGTezfuJR/1iYkiTB96bZpySOIw0QUzlNstNrVISmxf8alid/bAbWN94svV2FuVSGnVKt9jVdcQ0mhIaTnmo/n08CFAqU0ZDuYzOKiWHuNT%2bXnDQqRVkKsTWOsQocCaMCTOAfFIc7giIl9dk3vnvel6KXAuc0ZIvEdaA0BqW99pMrq8UghdqwoRL4lYqoDuaIood6eRqF0plXNPZVL4RRMplnuVSLGRCD1XUwY7FOhtUc3yMpSNyXuLbmA4xKlbRHk5B8RKfoWoxJ8nCyIvx5TbuWXv8q1%2b6863e3d/44vMX7vr0R7PmSVdyn2TrZhH4PopABty/jy5WNtSLI3Dze/7F%2b/7qL/zKvzl/KtgkEKOzzDxypHPq%2bWCCa32gE5Uxb4zQaHvo0PqxS5/2QFl3aqdNQ6YUJlGtejDFd9cLuGZ3JsBcxCWuYwB7EcFgjvVKhC4lKfzFT7rOKNithmTf0jQzgZj6VfuNPOZdBQALpGJ83sshuk5R2pTHQ536V%2bBO95mZgHIy03xD9k4LuXlevLCbxRnCkKB5IauJRVvvYYgiwu0JChsFBNsTXCg3sG/SQW6jKGBfJEUhrSNV%2bhGxqNX0dqWkoT4bg42g%2bO5wPBUpESFQlX7T1P%2bOI6gIgfUFlI0sTs5g8%2bRU%2b8M46UjJM6mXXHNOZKZpe6fghAMRS89Qmff2METTgHt1yY/F3UYAv%2bNIx8pGxUWbXvNVBfBcEvxJO71eiKYBZARJYqlppxKM5MUmINYz3ha7cl8lVUIkLL3ov00BLD9PJwGWubfg3CaIVnef7nfEYxGsC7g3AbOvhbk3ID9h/VPsfprxt7MHvLes/p8JCGcWrI9%2b4oOfis0r%2bv1i7CkJ3qmHl5vMzA4xdqWq6t7pZEMWXrTw1MCvAHme29D4w9vxrhYtp88j/Rl3xcZNoo%2bnnIbStkh18Zz1YaIpjZ/Ma46RAJ5dXPP1nEhbEmEP7xkze8Agd4t11CY9uQ8a1QJ6Qz1GUohtEggr7%2bkXq4gHPdRcF4NCFY2JkcEkDqXq2c47vD0KRF7Dc%2bd3R7ngI4h9HHkbnv7sY3jmOi8%2bvf3tB598/P5v/WHWPOkVvYuznWcReF1EIAPur4vLkA3ipUbgzg/8zi1/4xN/8wvPP4nNYV8LVAMCWLcg7PS5YILrfAfPzBxcoy536K1BWXeCOBai7moHQiuYld9YKUxVkN6VbqcxmhEbJxUREXA3lX2TKXtpza7T6TJtzs/JnEcOavEExmFZAGJ3yM6FdJYB1qohusNl7zhpJFMiM%2bli4OYRDeYqMUmzrAIutXhVfs3HM/Rn2sGxUZwjpM7HMvMpppnOFeNqBeHuBIV9BQHxdiGOCgOgvu6II40Uy4ESI42L9cevzaeaxFD77gAVFtiV6aHjYDgKMMipVqM6H6NcVhlNf6gdIsXZpsoiRgJlV4pbBZ/SO72swJ0AWmwmDeLh9q2Kh10Ccq7DnQvt74CsO2U89spJgStlPemTMu3n7Xqizx9GKr9JieLVxpI3SIQGC2BTmhQxC0nlX2k3G5t4kZ23evZ0MsZ106BdbCrHhg1fUYRY5x0y%2b4yLLbi17jg8rURSbjT7q%2bsq86u6%2bzRwt%2btxHwSXMmtg2HnKaKyufLXINRmivQdNUveSnlcryzGa%2bpD3sID4vffGZE0%2bkhkCFr4uApYkWg4bPVEzv1wYbP3c5bOq0c4HBOt5aZRmEyM5chJUBfOsW0neU3JcrR/lOTeym54tgvUUwOsgE2kcJTWDOMJs4CD//0tYbEc13kcio2I/hiFn0jxxkBrmqzJxEW210SmWE89/z2WizyRWz71VzOPQHXj629%2bc4Fx3574nvnz/veG0e/yBzIv9Jd2S2UZZBL4fI5AB9%2b/Hq5aNeSkCf/G/e%2bZz737vsZ/cOj/HvD8UhnbNL4GWkAQyYcwizAl2mrFxk3HRWYtQPxnA5Q9xFGFnDTi6PRfP9lZHuS4Wpe64JTSjKU6s%2bTjappe7erQLiB%2b5id6WP%2bjUtreMFzvBrUyvx9MFcOfvNQvLyPILgDeFo9yhwSRSXBs7aJVUGN4mQ68GN8uLYfD4pudH6E3Z6pzT78q6c%2bmM86KHVazroFmaCYvXGfsJeODrC8UG9o%2b66DQdaVolvRojF3lWRrKkzhTSciajRjvKNHvIIl%2bvhFowln2KfMDn6wmCWIE23%2b%2bzYRTlIfNxEg8BIlVPWHQL3tj5May14PXbaFZywpxb1lTxk3KeS24tJjIJwDXNfSweJEMvVn2iU9akiaw837EMPd%2b0swIit5FkZHlJW1YSqI%2bNa2DyJWp15YaWJfa3gH6votwreoxXGlLZbdOzEjYJWnXvSZoTGXbdzhiINSeLh402X%2bJjilwtnk26z5oGVdx3Kie8KEbpc1qdZZHPUkGlZIYxoisNGzrxr1wFJnZWGkU8HLJYepl9564menvq/SEdWxeTXvxMki0rwyKDbxIUeZvPIHw040DB9srY7PPIdVoI0IEvwLwZBTJmlaLZOyzCrBtgtq%2bJ2nSAfqmKaLsHh5ltDAHuVerUi1UE271EWSSadkTowIVHORFC0a17rCUx7jAemXYHKOZcDNoBThbnD114bPe%2brYfu%2bdzj9/5SpmG/oocoWzmLwBsjAhlwf2Ncxzf1Wbz31777yes2jn44qs0356ORMLdCOovMgkWqRQSRi0pEC0Sgs7ZoyNRp0AbSMuwKV%2bgcc2Ijh3rHRy2aYudwCesnSING6OcLUOnJQsNKhxdPCuaoMXfQLIfC0gmADRdAlYxaxyugGU7VmnLoiO90QHvHlGQmAe9llcIIeF9p6rJ0wakZH/vYV55id7IY18U3haIm2VfCcsZwIoL3Jg5MutgZ5tAq0bHGgbuvhHx/IDUCTjknhapzIiFqcEsuzszYtVFRas1IbHqOJjYiE0pmMVKoSK6JK02dqG93DXueFmQTZDeoVx9ESVwYEwJwAnmC/Q63vUQNo5WnSFJgtPCWQF%2bvLd5jEsDRc788Fpd6lUx8CnLybWFIHXSNfj7teiKdLPshWnUPnV6EZl0HRTkOtfYv6E1%2biSf3Ur72In2hO46x8%2bfmPIdyARhTYnOJmBCs83OmgwTq3MhKetIzCFZnn96NTQRkqIZxT4ptOcGyUk9gL7u1skwyolW23shnxGbS/BJJUevU%2bIoaKY1TdJAvcqYmxnQQibXkWEA%2b2XSV1ghwTzn6TGyBcEroL4XXZWA0iDCv5lHsz1Cs2T4MQAceWgjRhoemfHMsLzxeJ3LRiEJj5aoFrrSedOJQksl5n/N9QB8eCmTaUzsJKA/j81wqJ519uXJp0JMDTUsVeS6Z/NaKWjDbbPpsh4zPfvXZz3dOfP0z8Xxw/NE/%2bcVH39Rf%2bNnJZxF4k0cgA%2b5v8hvgjXD6B3/4G3//oz/9zl/peQrcDbbEulfEuflYgPusPkJt1xOmvXYyhlPLwYL2TitCoyuKVJF8dJohjuxoK/Ln1nO4ejcQtu3ERh5H21P0c0WEA9WaUyrTqkTouERDyuwTXHW9EhqBNjoKjZB5yQnRFA92hg426iE6dJ1JoSUL3jeqAXYHXgLctyc5bJTVJ7s9yqNZmqspjhujN8nBdcLEvYWSmWZRNfKdSQ6eqwWf7X4ea/VZgimslpZoos0GLpzib1WxPuoafbkDd6OIYm%2bIeeiiUYkxoCMGPbNN0ymO12ODG4OQZcaCzju5MuqheiLKmDmDEYyFjW9UHZye5NEUOZF%2bFa2C4vT9mZI7L8UqvY4F7ZTMENzb41rQr5Z%2behz7Htn3zjDS1/1AXG1YPEvdPBl5ymz4mskEWdYl/bwU2kYi0eG6FoA2JBlQi8wrAe%2bajDhJA6u0i8zlntVEe32Jlfb6XG5LIzW3sbea/nSjLDt%2bq7dPy2mWOtOmClnF6cZYT9r6AOu6swT0E7pbB85922ZVNkngTegU9P4QW8mkk%2b%2biKVO%2b6mHUC0Uyw5tjMtKkz6hS9N5iQSyLpmN1R5oNI8xYRBqpI5J0NTBN0Bj3Wgq82/30Qge5MjAfKiavU38WA2P2PRjobA73tl4nQw%2bMIgXy05GunyvHomsfsanaOEYvr9ay/LBe1ELra67KIXwoxr/bj3ucbzz%2b5NG1U3/81hvWnvvGfVnjpDfC71V2DlkEXm4EMuD%2bciOYbf%2baR%2bDmH/kX73vPXb/yT4a/idscrytT2WTcWUq27pZwNhhhzStr905KXNaABhssyWIsNmIPu2shjuwG6BB0h2PsesWkELUZj9H3ignLSwBM8E5O3DOdHNdLAbpk9wcBWpVQABtlJGTYk8VYCApIEcmMFmEmoJ6/7imETzbUsvHKZCrI6IxyaJZniMW3UhEPxR29SR6ep4CV59ss6r87E1%2bs5UQmQJZ4mMNadYb2MG9Yc91NqzpDb0DQEWG6XoezM0CrHIoDCyFItRDCKefR2dZWM/XSDOGc3UUj9B2Vw8hiWFhCJM5acOm5ysbXpGhXQ9/zS6jHY7HEpPa6XlaQbM/Ztop/MTcZQSQlLgTWdAJaI3jmvi7BQidMs5EsyZCs3p7jHUSomyZB3AVZ%2bUZV7S5l5obOOKYoVtat6MXlv5tV9bZviKb/YhF3asIjYbF5DNqOch91FvxewpXHxmJpQkN0RKkiXHNPpK%2bFfas7CtGq5dDuzS%2baFbgiaU/KI98Wx/IY4oNPZt9YU1Jvb%2bVO6SLavRIaPgsE%2bgT9PB%2bxwaTVuU0K6PpS8lAYzsVyMqlxlQpmoEB/%2bGGk8jID3I2VvrotsRkUwT0czIch5pU8isMppuIC46AwnMm/88MZRpU86lGAPnzjmR6JUdNazRc/%2bAEPwOMY4M/BFA7UMd3qyViUPQd2KhW0RkPMORtHvb25t3IuMCoUUc17yOd9NMZA4TY8/fvfxjN33hiffuo//vmT3/raN//whhvWt%2b767cwl5sV8B2TrZBF4M0QgA%2b5vhqv8Bj/HD37kdw/88D/9mU%2bd/gzeP87PMRuoXIZSDf7eN70iyp0%2bdg/7Atj5A07wXj8ZonvEFU37TiPG0Z0Az234uHonwLPreRzemWFeb8IftNH3SnDdWGQydJogaLconkxek4WmDsXCai0ZsMsnwbuWZSYVcJ2halbtslELxB5SFmpnTTOnJY/qtALCjdEZ5bFGWcyokDDqjhuhO8ljX2mG3YknwEWk6JGUvAloTwCfyHRyak/p0jcmVYsn2HNhxWJFI8NWFe72CPVyIEWsMqtBkJsPEBHtmU0kLvzYNIoS4B5O0fGK8IQ%2bVsAfuq4kRz2vJIw8y1drlENQIz/UmQHxihdpEZGgBo34TKJlBmaasibntiqTuZy2nIkNgbdl5m0yYXdG0C0sulkSrT0TBKORtyCMAJ8AvZx3cL4doVlz5TxWFxtP3oPcRjT2sq2uSW2zrLMH2De3iK6nK0uBrh2nJBn2MpsEgrMFtMq0NpvcjoXBYsMpfuN0U1kAfqtc4mdLicHKbAhjx2NJse2ixlkObxMlmxitXgO%2bz82trWaKqJeDSpMsk0wFxq0nAe62toOyGVOsKn2sIiBPIE8Q7QCzSYQZbTLnHmq%2byl6EcRdwrxFkJ9fQWDzyeATrEz4T5byy44OZWFS2BxHo9c6D0Cq1gki%2bA2YGvHPGKtHIm%2bvGe7Rb1MylMR5h7rimiJvfCC5G0xhTP49cIY9br%2bExgfu/PXn6639%2b7u7JqYceqBUn93wxs3S86PnJ3sgikEVgqXY%2bC0cWge/fCPzFTzz1yfn48Ht%2b4O3erZTLNMj%2bug62g7EpVAXOzyc45gDbzShh3JeYT0dbj0tH0XAC4lOC/3LFw8gwt90x%2by2mka6CVOrciTpa1RBtSlsa1i9aAadAdwcgUN8eeFgvx9gZO6o1F3Y4FEkMnWasNCYBT2YufXdMwG6AsZXPUn/uKtPO1dYFuJM9NHr2FGBfBWPUp3eHeeScGOdbQxzuVfBMEODGvI%2bnwgDXey6eFiQMHCMjTo961gqUAwV7tJCkGUurgAqLcIchhvUaKt0%2bnLpKENigyqnlUQvIusfiaS91BCGLdhWc83yZ%2bOjsQSQzBfVKTkCpgr4okR5ZjQxjSIkRx0amfnWxAFQcPLjOJW5tm1IJkDY2k2TKuZ2oOPZg621ykN6ldI/tK9PeGxnNdqzFtzYxSK/P49Ilh8fShIHe3yrRoRWm3Ie2vYBJ9PZkWazcRSQvejYK6q0MJhYZD3X4Kh8y/vjm85pIR3RLO0tiAbuVBxH4c5H4GJBP0M04rHbDFUmJ2ffFacsiAjaGtjCWm4iHPTXoKX26eO0zH04lF15%2bkaBEkxCxyYSlc2vBXDDucBxiVvJQ5MkRtNNxKKI7jBYujIYRKuzWStkMpTWui4Cm6iwGZYl27GBe0JqRTpf9AdSJSLoLi5RGi0j7rAch%2bc5kgyx7FGtzpFi197XZVMbo0r/eN3Y%2bAN7xwz4GZ4Hf/L2n/mX/1GMPBPPu8Uczd5jv3x%2bhbORZBF6lCGSM%2b6sU6Owwr2wE3v3h3/%2b5aP/Nd95y4zW/Ek7HCMIYsSmcJDQicDsymKNTr6MaT%2bQHtYcSaq52NxVQGwK7LeDq7Tme3cij0fPEHYW1igSYQzZZSj0xqbo32Z6FabKuwU1k3BMrSOq7x2ZjAroyf%2bGpl3YT2z4boTRYFInGJIeWAeyC8dgoapjHGvXtpjBVOyzqmcSRg7Wigq3dGZs9mfOTk0wwnbxJ8N4b5UAzS4Lk56IAlBNbO7368yUMr54Iy85ZDMbxKsdDwFbtZNwLMwFwbDrFItZafp7MMogkhxr2PL3lAY%2bsJV1j%2bgRbroB7sdZsaIFuAlarBPpjhOxSqWckXWVZM8CCXzL1FlFf6HvSuXYvYE7w3e57aBHgG1nH5dj6l3OHmvxGY7qXNEcYdtW9W2Zf/8bCmFumnKDfJg1SNGuYcXPpLi4%2bNSCSdppcGHNq7rkQaJOBlkTCLHa2x%2br702MRqU/KarNZY0Mravx132K/ySZJIhNiTcCyfn8hw1LNv1go2gOvFLDat9OFsXZGQ%2bwsjWMj10vAO1/YU4mAWclFYapAu2M64PJzIb3jGD77CJimBLIZk0zprBshX9YkXdN0B8E4RuhHGMPFdFgQqVUYOigVJihzxorORKlMhDUZVb5fzuk%2bR3NMRxHCiiffI/MgxFS6crFHgS/fCzkvwg1vz%2bN/%2b8fOmWbpu8c36qfve%2bwb/%2bUPb7jh6kwK83IevmzbLAJvsghkwP1NdsHfqKd783t//X13vvf223Old//jySiA59MPTn/n2UG15RcF3FGnXewM0DvsodlxjPOJiYqgP1caD7GwktaP/FknESwNWrpT5Mgkc5/snshGSH0tFCWrXInmYqVID%2bfOSFlTAejWGcbidtEiO/KD79EHbo8lwX6iaWcTlryAd/3L49jpshh5AtSJt8QO00Oei5XIWBZVJTLaX71RoUdMjP5YdfFch2TmCbq6nChifPUEnkzsOyKLaVSKCXgZTGYoxN6ZqudtTio%2bKlAlMUcrreQF5Kgen//0N4oodQcYN6qYbU/Eq54noWdv/NkJ7sgyV/OohmOxpNRFiwm5smjiwzHao5zMblimeBW4i/xHrluMnb4v61rfv/bQkxkOu60N/87Qw3ptAfK/18%2bKsMZGQ899UzMvWniy7LaAeamCOTl9LZQ1vvfpcXGfLITdMQCfEywW%2bC/kN7qFTQRscS4/t847actNrmt/GJgQ2HF2R5HgYAJ2AncGsEbGOqV16dsOuubacnzSvItJwdLAF5p8Kq2oi7fF2Yt7256/3q9yjWOgsOZhuqM2ofJWrHp6wehmLF5R7SWZoXumERih%2bnao0qA1gm56yLNZ2BAIcwDnhGZjztTxQjkolabIU3pTZFq7kI%2bpLoYa%2bUAAPffHZK3fjxGXHeSl4FQDkPN91BwPx78zPHN2a%2bv4WuPkfc3C9LG3Hq0%2b96UvPn8hk8N8r5%2bybH9ZBN74EciA%2bxv/Gr8pzvDOD33mFsed337Nj33kU638HOFwJD%2b1xK90lSFMOztnJ1UH9FmJujH6VzuongjhSAfFCLvNGGs9AgTDXkrkHNTjCbaHPtarAbpuEdFghrVKjJ5Pa0gR1KjXeeygGilV2B1po6Ul8CRAKSWJGaoWfa%2bFb9NBZl8C1lUiI4C1zGNG6IpPu2H4UG0WsQAAIABJREFUnTDltMKkYJEQWNBu2XWPrHfsiSMN49MbuerBLvtysBVHOOh52Impf3cxnkco5V20KpUzBw/FIgv4sydwYbiLU8U1HL62gX0oAEdcbG5dmCAQaa8en42aZm0tTs1vFAW0M7yUDoj%2bX9w0FkW2lhmlHMGt59GIxtgZeNLgSopXg4mgJNYKrFUjAcJ7gXfb7IrxoeuPldOwAda%2bWihyJc6IbFtQb8AqZTtpkC8Dt0WYV/gkrUqqOAaOleCyXlp89fYIdkV8fukDpLXnq2tZvbn1xJf6BuuakyrOXQXEsp0B9GLNaeCpsPHGW5%2bgmzMCLLi14F4kN0b7T2DPxJgLGwXJjIFJPuwYdtipNlWsa4t2rfbegu2LTt9IbtpeFa2wp/eL0bjT75/557TGRmdAYx5gyiLPCcF6DLfkIp6EmEvdBFCchOgWPEwGRdQqY3isRyhocetgHAtoL/jAaKjNx8qVCYLAQYUMOiLMoxh5z8EsXPydMlc1j1lBerS5mLJ%2bw8ujuZnHwSJw%2bGY8/TsDDKp/cOLBqNd%2b8sE/%2bdrx629ceyQrNr3ChylbPYtAFoEkAhlwz26GN0wE/vt/8pW/9q1TP/IPb30Hbu2d5Q%2b9KVSTWfIYxzzgiZmDYz7QqQPNnicSjd7VnmjeteOpL8C9EU5xYj2H2skQTqMgmncWWK6FE9FpE7wTaRHEymJ01ASSGwTno4tBOYvjyNKHlIWYxjF7aaiV0LMC53Qhij6uBBKUoGyUZtiZ5FTXPs5jvTjHztgH3W3aM09YU%2b6/Pchho6Zsfd44znA6f6sxwUa3KIy6ZRFlA2p8N0rI5Sm7AIYB0Du18/Dj37zwgOuXsXn4wXv7p0%2bcdSreOTn14fTg7uxDP3PTuxp3/swHN24dUbqwBXS7wKA/QTQkA68IJ1EbGKCqtpeeNI1a0kQroZtwvxGlT5WCeMlz6Y60CZOoIiLOHmg7esuqc/c5N8bOUAs/WxXdG2dCrNyJQ2qWCf4XX4Np/3QmB1y476XFvjTAMs32J4S5QaGsd1hjAXKPfyPTW4DuOQ4eOZnHTYdn6NPf%2bzKg/cU%2boGlgbtl9W%2bSb3geTBEkijK6fQNqy1xa8p9l4AeWpmYCkk6yR6Szte2XGgDKXNNC360pNgEhvFq47TBq7wwANOuow%2bRV3Ji2u3nHqaIZ9EdCz0yivfNchoB%2bopKUMAe6FiUrEdnwfjuOhwNkfhwXNMbpeRZyXIlo6lmaokxEvOxhOYkxiRwq1yZRzVq7BYtU8u5bGeH6HdSDq6JTMEpluuoWCugDl8h7cYh5X3%2byjuAt87r7hma3d/vHh6a9/pr914uz1N%2b7PwPqLvZGz9bIIZBG4bAQy4J7dIG%2bYCNzygf/zll7nh371b/ydOz/WPtVHTFRIhwkHODwM0KlVhYmsYEKpNZ6JgGt9w00bYXoC0SJHCk6pv67FE3TdkrC/ZNwtxnI9rqM682Qx7Kx9sNKAjMB9lXG34Dp9ESzbvmE7oE4oj5kmchktRNWkRJcoYdvtW3a/XI/gjTp2lyyl2NeZCkKpvnQQVQoCSIp1H7kccGIH6J5qf/7EI989P5m1n9ooHH/w2uuPvCDw%2bODHf/fAdx4/%2bfZ2eOsdrTv%2b8o/9Nz%2bCn1y7ysHj52KMdzVO7vZYQTxP0rCVKmfiywXqS6mjZdqkUZ4hCFzUk46yWhsgZ28AZCJLGrjiay%2bxEHCtUh8BcM4CJHM7YewNcLddZm1U16uGka9EpnCYnvo%2bmhWF6pTckLW/aGHiwoLbijblYR2Dve5Nk2DQBnStHKNU1CvWH6fO3iQE8sEe95Y93iqjn4zDJJEExSww5ZKsy%2bLsnoeNWpiAdx6OaxEkk3m3khWCbiuluZLOr3vVEdh9yf5TA2XSlMwNyYwUewnotZMEK9Zkp26KSCnRiWoNFVel7p%2b1cIAdhx2PRMQuF7tSmcDvBZq8%2bhV4MTn7CGHooVyeYs7z82JMqfbpsmOvdstt0j0qdtGJ6U5TQDAdYwTVsnO//NsquZjXPVA4V1jL49ypOZ55qvdwGG3dOzr10APT4e7xR//k72SNki5%2bOrJ3sghkEXiZEciA%2b8sMYLb56ycCH/nEZw9858Tg/R/8hY986jsPB/D9ofyGz1wWpgbYrVVRjegZvnDesN09ybzTijHozUWiIfpdYdfZbGlu7OkIMgzAMqhQ7An30CUTFFJH3R55S/aPVhZg2eS1itpBpiUzS4y7uMbQAjKnjjJkIsmul7RL6npxht0ZfaYXiy0SpJ5dCXQFkCIaMK3UI9qCUC9c9kEly9OP4eFaZefUMw/e/5WGc/zBzasrjzDF2b9/Pz79yQ%2bdv5Kr/MGPf/bAcPgszpwYvr0b337Htbe868fas9bhD92IW4MGsDufw58G6M9zqMzYt16dOmRoezDPwq9GLgICeCYzetGSKlubbK3aDzLWBNYE2wTOvHrpWC8%2bVzcfAvF0omUlKNbph4fkdVuvRNimraf994DX2MqiHK0hSH22RuA/pNSICYBKfJhsPbtTxNuumuOxszncdGiOE9sOZF3jLsR4cP1WNZJEQDT9KWkQY5Uw%2bilHIu6DI%2bBsw0ZqtmBJBmTAevq6Jk485k2rKbdIO7nN7a9Gyq1nz5kGJj7ioGSKh%2bVhsQkKGXAWGqu7kF36bkEadPEQbV%2bbdXE9xzw4fJ/1J0TznPlijwR2I1YQr8EpsRYDDprzHna8urDsmp4vZk4I3gXjmwNrkmD85s1tOJtOMHULyrYjRm4tB9%2bsN0Yeu8/jzPkLzx53/PkzZ7/x7z939fUNeWYq%2b/fjrit8Zq7k%2bcrWzSKQReDNHYEMuL%2b5r/8b7uzJur/tnX/rC9VmZZNFqgTvIVl3xGg6RZQxAQs32UG1wQ6qTQ9hP5Cun0SNAtKJCat5scmTolS%2b5zrwGjmEXf1cwCaMjeMltOovrEtePH7pIlXVpKtfe7OsxyNTSMAuqhZn4SBjJgqSMaWlMf2xghOegxvHiColAUTlMEa7msNzj%2bHhOJqeym96z/zUewanP/1/ffFcODp3/Ibrb9z69Cd/4orA%2bl430gc/8dkDp79zbn%2b%2btu/2Q0c3Du4c%2bJFDk%2b8617k%2bDr/tMPbVp9jcKhLq0CXGkUJfkt%2bMe%2bJiafwyFerSi1v7vDZL2jyqYeJz8fEdSQasfMYCtNWaAqs532vmI7nOpvjQvk402UZLLtfH/JuJAhMAAyNlAKwjWC%2bFotW3IJhA8dAa8NhZH2%2b7KsC3z%2bZwTYsG5joVoftQ5liBPxMCnR3QAlE9I94LyvxHaBOoV0PQaYfJBrcl22%2bPySZZojJZznsuCh1jwQQnKeBNrSGJgqnTWCr4Ne/zvDQ50eOnaxC4G4LsVjBGzy8KKGchuKY5nCVRhp15DxuZCUDnJ7RXTDVDY1yqpTyG0t5VGwrUKiUMhiOU6eTSb%2bsTU2uoHkheKXCXV%2bZmsElaavJHZHJ83ZkArSIwLvmYTB3kpiFa3SKeHuNM6b149NpWfPqR//drT556dvvcrL1z9sabjz3yvXhm9nqOsveyCGQRyCKQjkAG3LP74Q0Xgc13fedf/fQvX/ex3fYImNKeMMaaX8QsikAflYqUojnou0VUBgMMyMT3Bxg26ij1qaNVFOaxiZALlcOkRcCpH3/LSibdTQ0jt6KKXooxIUSztMwEd4aeylgMEifDTnmMlovGomlncyUuaYtHu2NLVJOdJxfcG7Pg1BVAWchHGHslHCn7GFZx5pGTuFACTrlF55nz9//HB8adk8eP7Tu4ddcr3PDlzg/9zi3hoHtwa3z7Hbf9/I9uTs4673nHMezb7QLHith8/rzpIy/MaYReror6rG/8/VSHn7Dr8g8Xa8U5tlmkuxBcGNDsaNGrZedtoEx30RUFytL1udxnL%2bVhobzn2Z2SsOvDSYhT7QJuvGqOJ875uOFggMfP%2bji6PpOCWzktw/wSOO8MfKyVtWaC50hALAW1BOoCyhXccxZgh/p9M0ArP6HchyBcOsKWrNO7Fk/LoWLIDIAF2zZhYAKwPfC1PqAaSdLB8TAJEDZ84CbJg1wJk0Bw8PYeltkBU18gxcEGNbMDsTVj5HNFdrwRj2X2gKejSbQmxs1gajru6thbwRRtn70AIpH/cB6lFUzkPSeKUSmXZL3hcJxYidqYdFFELZqgWsnJUC7QL15TBjPbwy7Gi6tfqxex0QC%2b8zTO4BextdnF%2ba/886eeHJ597IFx5/TxY0ezjqYv5XnItskikEXg5UUgA%2b4vL37Z1q/DCNz23t963w996OP/xq/Hm4PzPXG9YHGquMu4EPAuzPuATDtBgE7Wi0OMZ9xODKohICH6XS2ctOy7Zd07Y/VL3x7lsFGZ21rMS0ZHjDhIFhqdAIE/AU9nrIDdMukE7MIWUpRvqNOlLqiKXwUUEfgPWBQrPuwuonIe5XyA0czHHTf5uPuL2w9/65sPffqaI4Ozs/6F4w/c/YuvmQaXevhnnzu3v9o8cvuZrR94z1vvOHDnW96xsS86g836GtDrTjCc%2b1p8yu6Z85GAVFuAaYFpWuqQyEgMRqQcQph5Y6W5yxmMEudexOBSZjBaJS2Kld6XqYus3vmaOIni%2bnKZmL3K6W9TAbixNg6KHWyuA4%2bf8vHWQwGePO3jxkMB7n7MP/Pjx6abpYKHp87yXB1csz5JJDuJN7yAa3Uj4kKmW9h7aCE0ATblKDsjOqBw3SBh/eX2YPIZsuGTRq09YtGl8vkE40wEZBZn5ddg8bmHjWqE7b7OGOgxye5HIoXhdbH3a9JAzMie5BxMLUGrSjkRpTI6S2BtSeW6StFpDL%2bak3U4s9WssvEWa0oSFbxKYChhc2jRuFi04Nh6UGqe3UfBjEuzNTrRcGEqvFBlOZiXconuvpCLEQ6ZFBThH8KZR%2b599vi3jp/6ygHv/gevvXHzBes8Xodfh9mQsghkEXiDRSAD7m%2bwC5qdjkbgL//q1kN3bmzceqExRzgeCZAOnBiBC2wOQ0Q1X5SvwqZTelvLY4AcSv2hIh0C6VTzIzqXLGE30evqsSyYVG36wp/aXotLvp/SCps6UXTHPtYqM3QMi0wA4pnGSktARRCZNo/pDH34LlArhRh5bAAPrB/zsfsg8Gzvuc8//VD7fMP9wu%2bps8UvvGwJzCtxj33wI7914Dsntt5e2Th6VfnwHXciKFx39OjR2w842Kz8MHD6kTmmAw2YxGrEJlr02qYHCBvw5NCskGHXYlS7nujUrVrEONisGRceScokMVC%2bPu1so9deu9GmP7NJALdL/5vrtyllEu9%2bvX4ik7GY0wWONqf40jOFM3/tlmDz9LYCSa731qsCPH7ax81HApzcuXx0xdHFrNIw3XZtAS4BO8E975m9XGpsDUD6c74nYPsScq89kwfDuqdHqrUE%2bkDkm3lxaLIJJQu85x1tsGUfELG/5CNE%2bVlnLiDeq%2bcQtOfwpOGT9lOQ62OKxIPuDH4tj6A/g19V1ySRjrE5FIoItkbI7TeG7vJ4qie/ViOYQ8s/XQT0fmRhaSWHtauAZ7%2bBM2d2ti888Y3nH5jHF55qOvc/6NVq5244ejBrjvRKPPDZPrMIZBF4yRHIgPtLDl224es5Aj/44f/wcz/6P/7URztfwvvDwgiYzBGxY7sDlLeB%2bAD17jMEIoMx0hjTXEnkMYNAGHA6sRCQ0fP8IvCeCkACzgVpLBO03M/2cJmJt0kBIWOzHFgprnQ/pWuMBZUEmZ2przmCYdbtYQcTZdcrpQhOOY%2bZV4QzxJkHnsWFSuX0vZPn7ntg2j9/PF9p4YajR74nuvVX8pp/8BN/cmC4tUWhA05f6O%2bvVg7c/t7/%2bpaD997fOFSaBNfN3asO33CkuO9QAZvPz9X2j2CwEo4wHEtJLiqFAJ2RK1IkC/xkRaOASHe/tAWJ6YQsjFxhyGm1ucv4WuvwkLMu%2bj6lOVzsv4VtNkkApTu7E23YQ9B%2b69UBHj5hi4c98HpuD/Pq4mI8%2bkUCUpyhPWFdBbBW0nNLydGley4lX7ceCfDoSSadSLrj2vFfqqbCij8uNWlgE88XurZMgi7VdyDZRzIFktpb%2bkRWDqJj0wZblIetb0ToxkXUnAminrY6NVh78YwgxriqDjLz7YnUQ%2bTWeU1izHemKKwVMN%2bdIrem14l7CPI55Gs5BCOgvgu0PZx5%2bjQuTOPn773%2b0LnTj9//3XPvevfVu/f96UPPH9tc36pUWJT98us8Xiim2edZBLIIZBG40ghkwP1KI5at/30RgTs/8Ju3VH/0b398%2bkz/PTffXrg1GE9Q6kTorUEAfGkXqBXDhUyC/zKgg0w8GcvOxMeGYb%2bl42UpWGp7bgOxYOZp2VhAs0hd/WKxxabMGtK4Ri0LY4iEo6hgjUClP9bj7o7V5US7gNIRhdKOuaJV18HILwuoqcLHY%2bdmD8/j/KnK9fEzrdNfP/3Yf7n/%2bLW3HXvk%2b9ndgu40z545tz8ezg%2bW921edceP3XDwW923HkLURa5bvA658uG3bGJfaYjNtrcA8gwjQ1SbD6XrrVyfsS/Xl91i7cJ4cnbDctjtYQ6tylw7cC7UGUv3exrk7gV40%2b9Zhps7SKwrObaQicWynMr0hpWRi2zHiHT04IvBsGCZyy1HAjx0UhMCJn4X33CLYfOuW3TcNY5KcpxlCdCLUQO9lIc/PeO0tL3c25EA9sL%2bPKZbEzSZtMT67HEp7CtiemGSNH/i6zlfW7tI8wvGBl0aOyuEAQazHBzfR30IzKo48/gpXJiP56ecg/NnmgdL2P3i7z8wunD6rFMpnTu2SWb9ytyTXkossm2yCGQRyCLwciOQAfeXG8Fs%2b9dtBNiQ6dFnDv3SHT9%2b9Cc7ZwZ0cEalp6w71RQUWXTWXFwzNGynQ3BuungaUNEle%2bpQRjEXG8m9WHdpckPZg3GBSa9j2U4yptxHsgiTGKM3zonumsBNQUcM32ExKn2jje86gNGUOmSgWKRomB7SFdxxAHhqjDPxHPjPv/PUF1qlL/yeV22ce%2bCzP/%2baaddfyZtBdPFndvZ70/Dg9vzH7/CC8g03/fUbDtxxPW6fzYGtx8ab77mjhG8PgNEEGJwP4E7nSVFkKR9gOKbCmlA2Qr0cir89l3qZunCCRQetygw7g7yA%2bPRi4bOVzyRgeQ951AvFQa0mF%2b4zoicvsqFWXth3lekYKQ%2bdZYy8h5p82zxJ/da1Sy5nhfgZF27LhdIf%2b287O5B%2bTwpH2cRLagAWsz4XJZ3c2WVo%2b70Af1LiKYmTzlrxHNKJq9RvUB9Pf3UTXNagcJHImJkry6DbfXpNujsFppJb13fLOeTzPpo1H/kCUG8CDz%2bNM9UmsH4V8OU/OHn8yYdOfOWaQxfODnaeO34sk8C80C2afZ5FIIvA6zQCGXB/nV6YbFgvPwJkbJ966uH9N/2lX3vk4NEyhhf6iJwIUQ4odwyRaSwDOxtAbYdlqlrQyIWg3XbSFG6cjG1ZJTPphQCqO/KlSZA1nlv63EgBFJu4aI98kUmwOHJfeSG94HGpeXYT3/UFrTjKlQQ75asxjtyYwx//KR4%2bdd8DD%2bzf98y94aj7mhaavvwr9dL3oEWuO/vj%2bfTgdviX7nCj8g1vvTV/IL7q2OFrp/GtQc3MZKQOwevgTegHnyp6jFgjMAeLjBUvu2LFuTMw94A0KJqLBSXBJuU0BPhk5tPM/Sojnxx2FQ0vJniSVcR5xSxWA25fSw2zcdKxmny%2bZQG566j9oozcNJ/i/ux%2buGuO1erCeS%2bvFUOR/XAfFwj8k%2b61y5qstH6/YZ4N7ocsfsOy/SYRTc8O2DoBAeci9HGT%2blHK11Nl4MhtFBDS5sV2f9JLYPRCqlIf5EqoBGOM/BKKphOuLUI48JY82ifjM19/ChdyIU6VZ08%2bMzz/%2bAPjznPHj%2b2rbd316ddnbcdLv/OzLbMIZBF4s0YgA%2b5v1iv/JjlvArszF%2bL3/8RHP/Kp3gjong3g9CeolukzA/RaQO0C4O0vYr41QaOsYMZqzAnQtGjRUcu7xJlkUVnaJWNJSY0w7upiwoVsJnXL6YeM%2bxJ21BQwEnCJbtgAOUqlpXiQZjbszLpehjcO4AZFPHF6%2b2EWz20efOreRvnCPdTh3vXbH31dFpu%2blreXdawJxv2D7fBddxTy6zdce9PagXHt2OG3HcK%2b6ZPYrN8GDHdToJ61D8EIY3brioFyITS6eZ6JImpq5lX2pN1aaTVJuLxenWOnb655Rf3lZStxg5lhd5CXv9IwVnzOF681TqYIczVoFuyvMPriZJQPpPGWyKhEY282fqFv9FTCIGDeHtMkBYkqR7QodmXluhfWm8YxhzaOBPIibUl185Xt1LbG9UwXVO5CCoeTCZAkRnIozhQUKhKf5myIfr6CWp6yMAdBwcNs4KB5xEfhDLAV48wD38WFNefZU88%2bvHt%2bHl146vCB9tnB8OTxQ/uKW%2bwM8MUMqL%2bWj2B27CwCWQRewQi80Nf8K3jobNdZBF6dCLz3I7914Orb3/U34%2bDmT7gVZ7MYDtHbjhGI5jlArOYTas%2bYGhK17o3CXJqyiKxFGHiyrQuwxX9Z1pN/d%2bgG48QCcnbHKrNRmYM2eBLwM8mLLILWjyx%2bFaBu2dJaPhnEzC3iqScnDwe5c/cGp/7sgdvv2Nj9%2br3ffv7YTddtfT9r11%2bdqw58hMWuwy2cPtPfP8MM89kQP/hDt19z6NZDb/u3nzzheNG%2bG669de3AJABue/ux29vPYLN1IMTQFJracRq8CY/6G2GKtVaBtoUK0PcWxPPe6g7zioXTOhtbdmq7oAobrgy%2bBfW7/TyaVePbL1r8ue5ihbmnLn%2b9OkPbJAPJ9nu85ubivGNTyRSIVzvFBfjnS45hraZuMOmi3vT1s91lxc7U1GJ0hnk0OV4JkupeaFPKfVaKxv80duBSl24fPI0kxihJXcfaGChVgc8/jodrePbUice2zx/4C7cM3n3s26e/%2btmnzr3rnZu7933pW8/n83kc2qxtVSqVK%2b7w%2b2rdh9lxsghkEcgi8L2MQAbcv5fRzPb1uo3Aze/99fcdfM8vf%2bL6Om6f57AZjvsIOi6oe05YQKNzYEHjWiHA9qiAhmXbDXCnlr1VCqSgVAC5KaKzM/xWh3upIkZrr9cohFo8Z5TtpBrHfhE3bfj4zhBnqkWg8TFsfeXXnrpvcvaxBwaj08ePbV6dFdC9zDtsoZN3DrauectVTz69cdWNd/5/7V1LbBvXFT3z428o62eKH1GqJUVKi1ayEyNpC7QIiqJAYCSbIotkm3iVRbJP1skmy2668L67Au2iuy6KFm0cVzZiA5FrW1Kt0PxoSMkiOfzMN7jzZihacWwUtROGvgOJAwxnHt877w5w5s55584UErkzK76ComMDVgf4xY%2bRIVLat4BJC4XmEXDUt%2bG4Q1n6gHiHjJyy9DEHXSv0CI049jBhfyj7PT4hpLTBGoYpyuK3Q/ca3YLREm91iHTTw2NA0CcEYT%2bdFk41tD9oC83%2bTNoOvkMgoaFNDqQ%2b9VYMs7qF%2boms//CbgIj8Bw8F0bm6I6odRE8xJ%2bchdH/phvcDfU1vLQQvl9G3ZbgJMZ6U20M3lUa6DawuAXd6KDf2TJz5oR60f/kLGJoeAFjyGjvbW1ca5efONCq23UO7RfcBFz76P28DvpwRYAS%2bxwgwcf8eTx53/X9DYP3C79Zzr7978VxKeuN%2bE4We6SBJLC2s3KOEjhWUIRzICIjFhyx82E%2bdSIwwIHzMNrwajzylo7KSAZeSIScUUIVGWk9oHqBculs3giJJhXbF6ny3RZIeN7Rx%2bp585HeN1lzATW05NzG/mN/dm8/HvdNryy%2bq2fjyQnFjCZn6XZonE7MrOgoaCq1DIDMJlOrA/aMuvLgmFsRG2yAZP8R4g5iIBOfDKIaSnKHaABFXDvZBE5HjzHHq/YFkfpT9p9c4/pBMhSL1gRcD4q3BwD0n9GanK2gdRytYtEvvnMIIJ4lLqMlJxT10rdD1RXMCzbnatY8tN%2bPi4SFd1JBs%2bIGjDmXRVxYkXKmgbDV95JeAq3dhWDtflv5z1atpcRV9u3ZraXGv0rq3U5F0ubo0ydr0cbrHeCyMACPwZBB4LO94Mj/DrTACo4EAZVxvb325sfDSxU9eeGX6bKNko9eWkLLNY2IzsMQ47vOjrPIecvpAWjCwwhOr8SAnRdYx0u1Kslre3utcu/Pvf/x9Wvn86uqPFrg642iEygO9ILnVvtGb82035zp96HPFfLk2nY9pmbXsz89nnS4wKdWLpAtJ6drZiHAvL6eRXQGq20DTcKBPq6CkPVXMtTqOkN5QXHQtoVX/WlI7qrh0kniLE/1v8q08geG%2b7yOvSKi6PnLhPnvClJ2ql4p%2be/CSiQeJvi%2bKFZEtqaJJMA/Ew8nazzRU7gCtho1%2b3UUrZmNCkcpGs2s0ndMlLQ1U/rVZs2zjFp1fyB5WzP1SRVF1LK/OcKyPYKxzlxgBRmC0EWDiPtrzw717SgiQz3vlYOHCm2%2b/%2bp6nodA2bXTbEiYsU2QWiUT55CxDnttkHii2AYGnhXcROwscaJRgYavZVaEHnuzHGl6q0ug6Gqa6QM1HeasKo3Z5c7OQu/m39uHutfn5U/u6vgT2kX5Kk/0Umn3r/T8FxaLMoG3xuW94c7bVhtt3cpO51TwdKxmzeYoTTc2sBTElAUsvnc82j7qIJ5NF2bbgeRY2npvI7DadAtmUTpsOYkigk/GQNCTYUl%2bMgKr/TrhQW0qwhxbD7Ck1emH00FFGLjLUh3qTDFAlZKYUGEfDK1%2bDngV/Sl3o6lU3hmQO5S9224Ysx%2bBoMdjdbunUZBK7VzZrUWLfdoxbpAAqZhuV4EJZhrl/p6ImJ6pzGZmqaZGyXXzq9E%2bFjdgv/SmEJDfJCDACzwgCTNyfkYnmYX4dgXO//v1vcq%2b881qn2lzx/GTxJ4XEWVM71jBHygLaU3VOsYU50fDLpprCVOB%2bAZh7MvQLAAACUElEQVS2kAjomgN7Monpuo9DCeUbOzAcxyr5GW/71fPGvf9e38fWPy9fU9JTQUl1rtA4PtH51vufZk1zJxgQVX8NIsb2c7R34CA984O8a9twXRcrq4s5Gw42Xl7EXz7LzcdkF0qcWDMJxsm2xgF6qRVhag7yKgV6Yk/FnWhRNe0H2vhvgDGSdFGCXaW2VEARoTrY3ERnG6pYQO0qgNX34PoaXj9Xvnf9sz1oULF9e6%2bqKAoUTUP74G5FpYboeUKTqlFD8xlaKMpVR8cnonkkjAAjMGoIMHEftRnh/nyrCJB0Zud2eSNz7revPf%2brM89PdbBOMoZ2G5i2UOj1iBj56DgeLEdkI2Oqh2SMCidR5UoZMRnYaqE8cxqIJ0T3P70Jwyc/6YS7bTd20br3%2bWb3fvXaXGZ2/69/YAvHb3WSR/zHSIYznLU/2V3S3EfHJjLz%2bccR9UcNV4GClrEnsuOCd9MTBSTNG5BvOjScLWdrxREPIO4eI8AIPFMIMHF/pqabB/soBCISX7d/%2bmJcTa0t/vKFrBZHkWQBEiXc%2bw1xeXwWdkosFjysoRSPAXMLwNYfb9b68tGtpflKpVXdqywX9Otc%2bIVjjhFgBBgBRoARYASeFAJM3J8UktzOWCFAJJ48wGkj7TLIB5y0ysERscD0OCtJ2l0df77E1RnHKgh4MIwAI8AIMAKMwIghwMR9xCaEuzOaCFz84Eb20sfrtYsf3che%2bnCdq5WO5jRxrxgBRoARYAQYgbFGgIn7WE8vD44RYAQYAUaAEWAEGAFGYFwQ%2bAqtFm1XIFU53AAAAABJRU5ErkJggg==' /%3e%3c/defs%3e%3c/svg%3e)

 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 5' fill-rule='evenodd' style='fill:%23FADA4B' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.76C0 17.66 2.35 20.01 5.25 20.01L14.76 20.01C17.66 20.01 20.01 17.66 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.8009033203125 6.465576171875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 6' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.869999 0C0.39 0 0 0.650003 0 1.46001C0 2.27001 0.39 2.92001 0.869999 2.92001C1.35 2.92001 1.74 2.27001 1.74 1.46001C1.74 0.650003 1.35 0 0.869999 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.67315673828125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 7' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.869999 0C0.39 0 0 0.650003 0 1.46001C0 2.27001 0.39 2.92001 0.869999 2.92001C1.35 2.92001 1.74 2.27001 1.74 1.46001C1.74 0.650003 1.35 0 0.869999 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(1.238372802734375 4.77685546875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 8' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.05 0C0.27 0 -0.24 0.83 0.11 1.53C0.780001 2.86 2.26 3.79 4.00001 3.79C5.73001 3.79 7.22001 2.86 7.88001 1.53C8.23001 0.83 7.72001 0 6.94001 0L1.05 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 300' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M19.99 14.74L19.99 5.24C19.99 2.35 17.64 0 14.74 0L5.24001 0C2.35 0 0 2.35 0 5.24L0 14.76C0 17.65 2.35 20 5.24001 20L14.74 20C17.64 20 19.99 17.65 19.99 14.74Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.7655029296875 6.6884765625) rotate(0)'%3e%3cg opacity='1' transform='translate(0.28369140625 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 301' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.650007 1.04996C1.07001 0.579977 1.74002 0.389985 2.35003 0.529979C2.91003 0.669973 3.14004 1.11996 3.58004 1.43994C3.64004 1.48994 3.70004 1.51994 3.77004 1.51994C4.26005 1.50994 3.59004 0.669973 3.48004 0.579977C3.21004 0.349986 2.87003 0.169993 2.53003 0.0599976C1.87002 -0.139994 -0.180002 0.129995 0.0100001 1.20995C0.0100001 1.21995 0.0100001 1.23995 0.0200002 1.25995C0.170002 1.60994 0.510006 1.19995 0.650007 1.04996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.664306640625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 302' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.94005 1.20995C4.13005 0.129995 2.08002 -0.139994 1.42002 0.0599976C1.08001 0.169993 0.740008 0.349986 0.460005 0.579977C0.350004 0.669973 -0.310004 1.50994 0.170002 1.51994C0.250003 1.51994 0.310004 1.48994 0.370004 1.43994C0.810009 1.11996 1.04001 0.669973 1.60002 0.529979C2.21003 0.389985 2.87003 0.579977 3.30004 1.04996C3.43004 1.19995 3.78004 1.60994 3.92004 1.25995C3.94005 1.23995 3.94005 1.21995 3.94005 1.20995Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0 3.2818603515625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 303' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M14.37 0.880011C14.47 0.690009 14.61 0.350004 14.45 0.140002C14.17 -0.210003 13.74 0.170002 13.51 0.350004C12.76 0.930012 11.91 1.36002 11.01 1.68002C8.53997 2.52003 5.66998 2.58003 3.19999 1.72002C3.07999 1.69002 2.94999 1.64002 2.82999 1.60002C2.43999 1.45002 2.05999 1.27002 1.69999 1.06001C1.36 0.870011 1.03 0.640008 0.629998 0.550007C0.379999 0.510006 0.0999997 0.600008 0.0199999 0.870011C-0.0299999 1.02001 0.0199999 1.19002 0.0899997 1.34002C0.309999 1.74002 0.669998 1.96003 1.04 2.19003C1.15 2.25003 1.27 2.33003 1.38 2.39003C2.42999 2.97004 3.57999 3.37004 4.75998 3.58005C5.36998 3.69005 5.99998 3.75005 6.62998 3.77005C6.63998 3.77005 6.64998 3.77005 6.65998 3.77005C7.10998 3.78005 7.53997 3.77005 7.98997 3.75005C9.15997 3.66005 10.33 3.44004 11.41 2.99004C12.05 2.72003 12.67 2.40003 13.22 1.99003C13.64 1.68002 14.1 1.35002 14.37 0.880011Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 2' fill-rule='evenodd' style='fill:%23508AA5' opacity='1' d='M19.99 14.74L19.99 5.24C19.99 2.35 17.64 0 14.74 0L5.24001 0C2.35 0 0 2.35 0 5.24L0 14.76C0 17.65 2.35 20 5.24001 20L14.74 20C17.64 20 19.99 17.65 19.99 14.74Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.7860107421875 8.5955810546875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 3' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.870012 0C0.390005 0 0 0.649986 0 1.45997C0 2.25995 0.390005 2.91994 0.870012 2.91994C1.35002 2.91994 1.74002 2.25995 1.74002 1.45997C1.74002 0.649986 1.35002 0 0.870012 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.679931640625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 4' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.870012 0C0.390005 0 0 0.649986 0 1.45997C0 2.25995 0.390005 2.91994 0.870012 2.91994C1.35002 2.91994 1.74002 2.25995 1.74002 1.45997C1.74002 0.649986 1.35002 0 0.870012 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 160' fill-rule='evenodd' style='fill:%2389B23C' opacity='1' d='M19.99 14.74L19.99 5.24C19.99 2.35 17.64 0 14.74 0L5.24001 0C2.35 0 0 2.35 0 5.24L0 14.76C0 17.65 2.35 20 5.24001 20L14.74 20C17.64 20 19.99 17.65 19.99 14.74Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.933349609375 6.1693115234375) rotate(0)'%3e%3cg opacity='1' transform='translate(3.0303955078125 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 161' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.22999 3.23003C3.40999 3.05003 3.40999 2.76002 3.22999 2.58002L0.789998 0.140001C0.609999 -0.0500004 0.319999 -0.0500004 0.14 0.140001C-0.0499999 0.320003 -0.0499999 0.610005 0.14 0.790007L2.57999 3.23003C2.66999 3.32003 2.78999 3.37003 2.90999 3.37003C3.02999 3.37003 3.13999 3.32003 3.22999 3.23003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 162' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.789998 3.23003L3.22999 0.790007C3.40999 0.610005 3.40999 0.320003 3.22999 0.140001C3.04999 -0.0500004 2.75999 -0.0500004 2.57999 0.140001L0.14 2.58002C-0.0499999 2.76002 -0.0499999 3.05003 0.14 3.23003C0.219999 3.32003 0.339999 3.37003 0.459999 3.37003C0.579999 3.37003 0.699998 3.32003 0.789998 3.23003Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(6.44970703125 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 163' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.22999 3.23003C3.40999 3.05003 3.40999 2.76002 3.22999 2.58002L0.789998 0.140001C0.609999 -0.0500004 0.319999 -0.0500004 0.14 0.140001C-0.0499999 0.320003 -0.0499999 0.610005 0.14 0.790007L2.57999 3.23003C2.66999 3.32003 2.78999 3.37003 2.90999 3.37003C3.02999 3.37003 3.14999 3.32003 3.22999 3.23003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0.0120849609375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 164' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.770005 3.23003L3.22002 0.790007C3.40002 0.610005 3.40002 0.320003 3.22002 0.140001C3.04002 -0.0500004 2.75002 -0.0500004 2.57002 0.140001L0.140001 2.58002C-0.0500003 2.76002 -0.0500003 3.05003 0.140001 3.23003C0.220001 3.32003 0.340002 3.37003 0.460003 3.37003C0.570004 3.37003 0.690005 3.32003 0.770005 3.23003Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0 5.566650390625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 165' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.61002 0.640008C4.54002 0.690009 4.47002 0.75001 4.41002 0.810011C4.30002 0.910012 4.20002 1.01001 4.11002 1.04001C3.88001 1.13001 3.64001 0.980013 3.17001 0.640008C2.85001 0.420006 2.49001 0.160002 2.08001 0.0500007C1.24 -0.170002 0.280001 0.340005 0.0200001 1.19002C-0.0500002 1.43002 0.0800003 1.69002 0.320001 1.77002C0.560002 1.84002 0.830003 1.71002 0.900003 1.46002C1.02 1.10001 1.48001 0.850011 1.85001 0.950013C2.11001 1.01001 2.36001 1.20002 2.64001 1.39002C3.13001 1.74002 3.73001 2.19003 4.46002 1.90003C4.70002 1.80002 4.88002 1.65002 5.03002 1.50002C5.10002 1.45002 5.14002 1.40002 5.19002 1.37002C5.55002 1.08001 6.10002 1.01001 6.53002 1.19002C6.71002 1.26002 6.89003 1.38002 7.07003 1.51002C7.23003 1.62002 7.40003 1.74002 7.59003 1.84002C8.08003 2.09003 8.80003 2.21003 9.31003 1.78002C9.45004 1.66002 9.54004 1.53002 9.63004 1.40002C9.69004 1.32002 9.75004 1.24002 9.80004 1.20002C9.95004 1.08001 10.3 1.20002 10.74 1.51002C11.24 1.89003 11.69 2.07003 12.09 2.07003C12.34 2.07003 12.56 2.00003 12.75 1.87002C12.91 1.77002 13.02 1.62002 13.1 1.51002C13.14 1.46002 13.16 1.43002 13.2 1.39002C13.43 1.14002 13.8001 1.12001 14.0801 1.18002C14.3401 1.24002 14.6801 1.42002 14.7801 1.74002C14.8501 1.98003 15.1101 2.12003 15.3501 2.04003C15.6001 1.97003 15.7301 1.71002 15.6601 1.46002C15.4701 0.870012 14.9401 0.400005 14.2701 0.260003C13.5901 0.110001 12.92 0.310004 12.51 0.77001C12.46 0.810011 12.42 0.860011 12.38 0.920012C12.32 0.990013 12.26 1.07001 12.21 1.10001C12.05 1.21002 11.7 1.09001 11.26 0.77001C10.22 0.0200003 9.58004 0.190003 9.22003 0.460006C9.05003 0.600008 8.94003 0.75001 8.86003 0.870012C8.80003 0.950013 8.75003 1.03001 8.70003 1.07001C8.55003 1.20002 8.23003 1.14002 8.00003 1.02001C7.87003 0.950013 7.72003 0.850011 7.58003 0.75001C7.36003 0.610008 7.14003 0.450006 6.88003 0.340005C6.14002 0.0300004 5.25002 0.150002 4.61002 0.640008Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 308' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20 14.74L20 5.24C20 2.35 17.65 0 14.76 0L5.24 0C2.35 0 0 2.35 0 5.24L0 14.76C0 17.65 2.35 20 5.24 20L14.76 20C17.66 20 20 17.65 20 14.74Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.88916015625 7.3775634765625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 4.1312255859375) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 309' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.510015 2.45999 0.640018 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.3863525390625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 310' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.510015 2.45999 0.640018 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.772705078125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 311' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.520015 2.45999 0.660019 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.8372802734375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 312' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.510015 2.45999 0.640018 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.2235107421875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 313' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.520015 2.45999 0.660019 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(12.6219482421875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 314' fill-rule='evenodd' style='fill:%23F3ACC6' opacity='1' d='M0.720021 2.25999L1.57005 0.549999C1.67005 0.349999 1.58005 0.14 1.40004 0.0399999C1.21003 -0.0599999 0.990029 0.0299999 0.900026 0.21L0.0400012 1.92C-0.0600017 2.11 0.0300009 2.32999 0.210006 2.42999C0.270008 2.44999 0.320009 2.45999 0.380011 2.45999C0.510015 2.45999 0.640018 2.38999 0.720021 2.25999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(1.7061767578125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 315' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.59001 0C1.26 -0.00999983 0.310001 0.239996 0.640002 0.699988C0.890003 1.04998 2.01001 1.06998 2.41001 1.20998C2.89001 1.35998 3.37001 1.61997 3.66001 2.03997C3.75001 2.15996 3.78001 2.37996 3.64001 2.40996C3.59001 2.41996 3.55001 2.40996 3.51001 2.39996C2.63001 2.16996 1.70001 2.34996 0.810003 2.51996C0.590002 2.55996 0.370001 2.59996 0.200001 2.73995C0.0300001 2.86995 -0.0600002 3.10995 0.0500002 3.29994C0.0900003 3.39994 0.210001 3.46994 0.340001 3.44994C0.400001 3.43994 0.440002 3.39994 0.490002 3.37994C1.28 2.93995 2.19001 2.75995 3.07001 2.85995C3.42001 2.88995 3.82001 2.96995 4.08002 2.73995C4.41002 2.45996 4.30002 1.92997 4.08002 1.55997C3.63001 0.769987 2.51001 0.0199997 1.59001 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.5509033203125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 316' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.210001 1.55997C-0.01 1.92997 -0.12 2.45996 0.210001 2.73995C0.470002 2.96995 0.870003 2.88995 1.22 2.85995C2.10001 2.75995 3.01001 2.93995 3.80001 3.37994C3.85001 3.39994 3.89001 3.43994 3.95001 3.44994C4.08002 3.46994 4.20002 3.39994 4.24002 3.29994C4.35002 3.10995 4.26002 2.86995 4.09002 2.73995C3.92001 2.59996 3.70001 2.55996 3.48001 2.51996C2.59001 2.34996 1.66001 2.16996 0.780003 2.39996C0.740003 2.40996 0.700003 2.41996 0.650002 2.40996C0.510002 2.37996 0.540002 2.15996 0.630002 2.03997C0.920003 1.61997 1.40001 1.35998 1.88001 1.20998C2.28001 1.06998 3.40001 1.04998 3.65001 0.699988C3.98001 0.239996 3.03001 -0.00999983 2.70001 0C1.80001 0.0199997 0.680003 0.769987 0.210001 1.55997Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 359' fill-rule='evenodd' style='fill:%23EF7C00' opacity='1' d='M20 14.68L20 5.3C20 2.37 17.63 0 14.7 0L5.3 0C2.37 0 0 2.37 0 5.3L0 14.7C0 17.63 2.37 20 5.3 20L14.7 20C17.63 20 20 17.61 20 14.68Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.470306396484375 3.64306640625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 5.6748046875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 360' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.268 0.676008C0.592999 0.88101 0.990999 0.89301 1.377 0.88101C1.714 0.86901 2.076 0.84501 2.353 0.640007C2.51 0.531006 2.63 0.363004 2.618 0.170002C2.618 0.146002 2.606 0.122001 2.594 0.0970011C2.57 0.0610007 2.498 0.0610007 2.45 0.0730008C1.931 0.182002 1.389 0.351004 0.857999 0.230003C0.664999 0.182002 0.520999 0.0610007 0.34 0.0130002C0.147 -0.0470005 -0.022 0.109001 0.002 0.314004C0.014 0.471005 0.135 0.592007 0.268 0.676008Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.452301025390625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 361' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.266 0.640007C0.542999 0.84501 0.904999 0.86901 1.243 0.88101C1.628 0.89301 2.026 0.88101 2.352 0.676008C2.484 0.592007 2.605 0.471005 2.617 0.314004C2.641 0.109001 2.472 -0.0470005 2.279 0.0130002C2.098 0.0610007 1.954 0.182002 1.761 0.230003C1.23 0.351004 0.687999 0.182002 0.17 0.0730008C0.121 0.0610007 0.049 0.0610007 0.025 0.0970011C0.013 0.122001 0.000999999 0.146002 0.000999999 0.170002C-0.011 0.363004 0.109 0.531006 0.266 0.640007Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(3.283447265625 2.0382080078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 362' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.710002 4.26C1.52 5.08 2.81001 5.27 3.71001 4.51C4.28001 4.05 4.49001 3.32 4.51001 2.6C4.52001 1.87 4.25001 0.98 3.67001 0.48C3.31001 0.16 2.86001 0.01 2.40001 0C0.2 -0.02 -0.770002 2.77 0.710002 4.26Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(9.748687744140625 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 2.1239013671875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 363' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.94999 1.48001C1.89999 1.53001 1.84999 1.56001 1.79999 1.57001C1.54999 1.66001 1.52999 1.33001 1.49999 1.18001C1.48999 1.08001 1.46999 0.970006 1.44999 0.880005C1.42999 0.660004 1.39999 0.440003 1.36999 0.220001C1.35999 0.130001 1.33999 0.0300002 1.23999 0.0100001C1.13999 -0.0200001 1.03 0.0200001 0.929996 0.0700004C0.689997 0.200001 0.489998 0.390002 0.309999 0.600004C0.259999 0.660004 0.209999 0.720004 0.139999 0.760005C0.0499998 0.860005 -0.0499998 1.02001 0.0299999 1.15001C0.0899996 1.26001 0.219999 1.27001 0.319999 1.21001C0.479998 1.12001 0.519998 0.910006 0.619997 0.760005C0.659997 0.690004 0.719997 0.630004 0.789996 0.610004C0.859996 0.590004 0.959996 0.600004 1.01 0.660004C1.06 0.720004 1.06 0.830005 1.07 0.900005C1.1 1.15001 1.13999 1.41001 1.17999 1.66001C1.18999 1.77001 1.20999 1.89001 1.21999 2.00001C1.23999 2.09001 1.24999 2.18001 1.29999 2.26001C1.35999 2.37001 1.46999 2.42001 1.58999 2.37001C1.71999 2.31001 1.80999 2.19001 1.90999 2.09001C2.02999 1.98001 2.13999 1.88001 2.25999 1.76001C2.31999 1.70001 2.37999 1.64001 2.41999 1.56001C2.50999 1.39001 2.37999 1.20001 2.18999 1.27001C2.08999 1.32001 2.01999 1.41001 1.94999 1.48001Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.6322021484375 1.05078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 364' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.0300002 0.960002C0.0900006 1.04 0.180001 1.06 0.270002 1.01C0.410003 0.940002 0.440003 0.770001 0.520004 0.630001C0.540004 0.590001 0.590004 0.540001 0.650005 0.510001C0.710005 0.490001 0.790006 0.500001 0.830006 0.550001C0.870006 0.600001 0.870006 0.690001 0.880006 0.760001C0.910006 0.960002 0.940007 1.18 0.970007 1.38C0.980007 1.48 0.990007 1.56 1.00001 1.66C1.01001 1.73 1.03001 1.82 1.06001 1.88C1.11001 1.97 1.21001 2.02 1.30001 1.97C1.41001 1.92 1.48001 1.83 1.57001 1.74C1.67001 1.66 1.76001 1.56 1.86001 1.47C1.91001 1.42 1.95001 1.37 1.99001 1.31C2.06001 1.18 1.95001 1.01 1.80001 1.07C1.71001 1.1 1.65001 1.18 1.59001 1.24C1.57001 1.26 1.53001 1.3 1.48001 1.31C1.28001 1.38 1.27001 1.12 1.24001 0.980002C1.23001 0.900002 1.22001 0.820001 1.21001 0.730001C1.18001 0.550001 1.16001 0.370001 1.13001 0.19C1.12001 0.12 1.11001 0.0300001 1.03001 0.01C0.940007 -0.02 0.850006 0.02 0.770005 0.0600001C0.580004 0.16 0.400003 0.320001 0.250002 0.490001C0.220002 0.540001 0.170001 0.590001 0.110001 0.630001C0.0500004 0.720001 -0.0500004 0.850002 0.0300002 0.960002Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.1561279296875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 365' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.830003 1.17999C0.840003 1.25999 0.850003 1.33999 0.860003 1.41999C0.880003 1.47999 0.890003 1.53999 0.910003 1.59999C0.960003 1.66999 1.03 1.70999 1.12 1.66999C1.21 1.62999 1.27 1.54999 1.35 1.47999C1.43 1.39999 1.5 1.31999 1.59 1.23999C1.62001 1.19999 1.67001 1.14999 1.70001 1.10999C1.76001 0.989992 1.67001 0.849993 1.54 0.899992C1.47 0.929992 1.42 0.989992 1.37 1.02999C1.35 1.05999 1.31 1.07999 1.27 1.08999C1.11 1.14999 1.09 0.929992 1.07 0.819993C1.06 0.759993 1.05 0.679994 1.03 0.609995C1.01 0.459996 1 0.309997 0.970003 0.149999C0.960003 0.0899992 0.950003 0.0199998 0.880003 0.00999991C0.800003 -0.00999991 0.720002 0.00999991 0.660002 0.0499996C0.490002 0.129999 0.350001 0.259998 0.230001 0.409997C0.190001 0.459996 0.15 0.489996 0.0900003 0.549995C0.0500002 0.619995 -0.0400001 0.729994 0.0200001 0.829993C0.0700002 0.889992 0.15 0.899992 0.230001 0.869993C0.350001 0.789993 0.370001 0.649994 0.440001 0.539995C0.480001 0.499996 0.520002 0.459996 0.560002 0.439996C0.610002 0.429996 0.670002 0.439996 0.710002 0.479996C0.740002 0.519996 0.740002 0.599995 0.760002 0.649994C0.780002 0.829993 0.800003 0.999991 0.830003 1.17999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 289' fill-rule='evenodd' style='fill:%239FA0A0' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.66 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.6776123046875 6.3677978515625) rotate(0)'%3e%3cg opacity='1' transform='translate(2.42620849609375 5.0435791015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 290' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.27 2.9C7.83 1.23 6.15 0 4.15 0C2.15 0 0.47 1.24 0.02 2.9C-0.1 3.34 0.25 3.78 0.71 3.78L3.33 3.43C3.85 3.35 4.38 3.35 4.91 3.43L7.59 3.78C8.05 3.78 8.4 3.34 8.27 2.9Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 291' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.61002 0.169998C4.57002 0.0599994 4.48002 -0.00999991 4.37002 0C4.28002 0.00999991 4.22002 0.0599994 4.18002 0.119999C3.81002 0.499995 3.49002 0.889992 3.07002 1.17999C2.62001 1.48999 2.10001 1.64998 1.59001 1.74998C1.20001 1.81998 0.630003 1.73998 0.270001 1.87998C-0.170001 2.05998 -0.0100001 2.49998 0.300002 2.74997C0.660003 3.03997 1.17001 3.14997 1.63001 3.10997C2.11001 3.07997 2.58001 2.87997 3.01002 2.62998C3.79002 2.14998 4.46002 1.38999 4.62002 0.479996C4.63002 0.379996 4.65002 0.269998 4.61002 0.169998Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.01116943359375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 292' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.460002 0.119999C0.410002 0.0599994 0.350002 0.00999991 0.270001 0C0.160001 -0.00999991 0.0600003 0.0599994 0.0200001 0.169998C-0.0100001 0.279997 0 0.379996 0.0100001 0.479996C0.170001 1.38999 0.840004 2.14998 1.63001 2.62998C2.05001 2.87997 2.52001 3.07997 3.00002 3.10997C3.46002 3.14997 3.97002 3.03997 4.33002 2.74997C4.64002 2.49998 4.80002 2.05998 4.37002 1.87998C4.00002 1.73998 3.44002 1.81998 3.04002 1.74998C2.53001 1.64998 2.01001 1.48999 1.57001 1.17999C1.15001 0.889992 0.820004 0.499995 0.460002 0.119999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 27' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.65 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.8721923828125 6.52587890625) rotate(0)'%3e%3cg opacity='1' transform='translate(0.916748046875 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 28' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.869986 0C0.389994 0 0 0.649998 0 1.46C0 2.26999 0.389994 2.91999 0.869986 2.91999C1.34998 2.91999 1.73997 2.26999 1.73997 1.46C1.73997 0.649998 1.34998 0 0.869986 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.68505859375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 29' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.869986 0C0.389994 0 0 0.649998 0 1.46C0 2.26999 0.389994 2.91999 0.869986 2.91999C1.34998 2.91999 1.73997 2.26999 1.73997 1.46C1.73997 0.649998 1.34998 0 0.869986 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0 4.3668212890625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 30' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.00685 3.48187L2.18684 3.48187L2.18684 2.29187L0.566895 2.29187C0.686891 2.97187 1.28687 3.48187 2.00685 3.48187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 31' fill-rule='evenodd' style='fill:white' opacity='1' d='M11.69 2.29187L10.41 2.29187L10.41 3.48187C11.05 3.41187 11.57 2.92187 11.69 2.29187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 32' fill-rule='evenodd' style='fill:white' opacity='1' d='M10.41 0.542725L10.41 1.76268L11.69 1.76268C11.58 1.1227 11.06 0.612722 10.41 0.542725Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 33' fill-rule='evenodd' style='fill:white' opacity='1' d='M8.49207 1.76069L9.88207 1.76069L9.88207 0.53064L8.49207 0.53064L8.49207 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 34' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.72607 1.76069L4.11608 1.76069L4.11608 0.53064L2.72607 0.53064L2.72607 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 35' fill-rule='evenodd' style='fill:white' opacity='1' d='M4.64417 1.76069L6.03417 1.76069L6.03417 0.53064L4.64417 0.53064L4.64417 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 36' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.56201 1.76069L7.95202 1.76069L7.95202 0.53064L6.56201 0.53064L6.56201 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 37' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.00485 0.53064C1.27483 0.53064 0.674813 1.06066 0.55481 1.76069L2.18486 1.76069L2.18486 0.53064L2.00485 0.53064Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 38' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.56201 3.48187L7.95202 3.48187L7.95202 2.29187L6.56201 2.29187L6.56201 3.48187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 39' fill-rule='evenodd' style='fill:white' opacity='1' d='M4.64417 3.48187L6.03417 3.48187L6.03417 2.29187L4.64417 2.29187L4.64417 3.48187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 40' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.72607 3.48187L4.11608 3.48187L4.11608 2.29187L2.72607 2.29187L2.72607 3.48187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 41' fill-rule='evenodd' style='fill:white' opacity='1' d='M8.49207 3.48187L9.88207 3.48187L9.88207 2.29187L8.49207 2.29187L8.49207 3.48187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 42' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.14 0.269996C4.19 0.179997 4.27001 0.109998 4.38001 0.109998C4.49001 0.109998 4.57001 0.169998 4.62001 0.269996L6.07001 0.269996C6.12001 0.179997 6.20001 0.109998 6.31001 0.109998C6.42001 0.109998 6.50001 0.169998 6.55001 0.269996L8.00001 0.269996C8.05001 0.179997 8.13001 0.109998 8.24001 0.109998C8.35001 0.109998 8.43001 0.169998 8.48001 0.269996L9.93001 0.269996C9.98001 0.179997 10.06 0.109998 10.17 0.109998C10.28 0.109998 10.37 0.169998 10.41 0.269996C11.22 0.339995 11.88 0.969986 11.98 1.75997C12.09 1.79997 12.17 1.88997 12.17 2.00997C12.17 2.13997 12.09 2.23997 11.97 2.26997C11.85 3.04996 11.22 3.65995 10.42 3.73995C10.41 3.86994 10.3 3.97994 10.16 3.97994C10.02 3.97994 9.90001 3.86994 9.89001 3.73995L8.50001 3.73995C8.49001 3.86994 8.37001 3.97994 8.24001 3.97994C8.11001 3.97994 7.99001 3.86994 7.97001 3.73995L6.59001 3.73995C6.57001 3.86994 6.45001 3.97994 6.32001 3.97994C6.19001 3.97994 6.07001 3.86994 6.06001 3.73995L4.67001 3.73995C4.66001 3.86994 4.54001 3.97994 4.40001 3.97994C4.27001 3.97994 4.15 3.86994 4.14 3.73995L2.73 3.73995C2.71 3.86994 2.59 3.97994 2.46 3.97994C2.33 3.97994 2.21 3.86994 2.2 3.73995L2 3.73995C1.13 3.73995 0.42 3.09996 0.29 2.26997L0.27 2.26997C0.12 2.26997 0.01 2.14997 0 2.00997C0 2.01997 0 2.01997 0 2.01997C0.01 3.11996 0.900001 3.99994 2 3.99994L10.24 3.99994C11.35 3.99994 12.24 3.10996 12.24 1.99997L12.24 1.97997C12.24 0.889987 11.35 0 10.24 0L2 0C0.890001 0 0 0.889987 0 1.99997C0 2.00997 0 2.00997 0 2.00997C0.01 1.87997 0.12 1.75997 0.27 1.75997L0.29 1.75997C0.41 0.919987 1.13 0.269996 2 0.269996L2.21 0.269996C2.26 0.179997 2.34 0.109998 2.45 0.109998C2.56 0.109998 2.64 0.169998 2.69 0.269996L4.14 0.269996ZM2.45 0.109998C2.34 0.109998 2.26 0.179997 2.21 0.269996L2 0.269996C1.13 0.269996 0.41 0.919987 0.29 1.75997L0.27 1.75997C0.12 1.75997 0.01 1.87997 0 2.00997C0.01 2.14997 0.12 2.26997 0.27 2.26997L0.29 2.26997C0.42 3.09996 1.13 3.73995 2 3.73995L2.2 3.73995C2.21 3.86994 2.33 3.97994 2.46 3.97994C2.59 3.97994 2.71 3.86994 2.73 3.73995L4.14 3.73995C4.15 3.86994 4.27001 3.97994 4.40001 3.97994C4.54001 3.97994 4.66001 3.86994 4.67001 3.73995L6.06001 3.73995C6.07001 3.86994 6.19001 3.97994 6.32001 3.97994C6.45001 3.97994 6.57001 3.86994 6.59001 3.73995L7.97001 3.73995C7.99001 3.86994 8.11001 3.97994 8.24001 3.97994C8.37001 3.97994 8.49001 3.86994 8.50001 3.73995L9.89001 3.73995C9.90001 3.86994 10.02 3.97994 10.16 3.97994C10.3 3.97994 10.41 3.86994 10.42 3.73995C11.22 3.65995 11.85 3.04996 11.97 2.26997C12.09 2.23997 12.17 2.13997 12.17 2.00997C12.17 1.88997 12.09 1.79997 11.98 1.75997C11.88 0.969986 11.22 0.339995 10.41 0.269996C10.37 0.169998 10.28 0.109998 10.17 0.109998C10.06 0.109998 9.98001 0.179997 9.93001 0.269996L8.48001 0.269996C8.43001 0.169998 8.35001 0.109998 8.24001 0.109998C8.13001 0.109998 8.05001 0.179997 8.00001 0.269996L6.55001 0.269996C6.50001 0.169998 6.42001 0.109998 6.31001 0.109998C6.20001 0.109998 6.12001 0.179997 6.07001 0.269996L4.62001 0.269996C4.57001 0.169998 4.49001 0.109998 4.38001 0.109998C4.27001 0.109998 4.19 0.179997 4.14 0.269996L2.69 0.269996C2.64 0.169998 2.56 0.109998 2.45 0.109998ZM0 2.01997C0 2.01997 0 2.01997 0 2.00997C0 2.00997 0 2.00997 0 1.99997C0 2.00997 0 2.00997 0 2.01997ZM0 2.02997C0 2.01997 0 2.01997 0 2.01997C0 2.00997 0 2.00997 0 1.99997L0 2.02997Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 43' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56201 3.49817L6.56201 3.73917C6.56201 3.75117 6.56201 3.76317 6.56201 3.76317L7.94902 3.76317C7.94902 3.75117 7.94902 3.73917 7.94902 3.73917L7.94902 3.49817L6.56201 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 44' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.00156 3.49393C1.29154 3.49393 0.691524 2.98394 0.571521 2.30396L0.301514 2.30396C0.431517 3.13394 1.14154 3.77393 2.01156 3.77393L2.19156 3.77393C2.19156 3.76393 2.19156 3.75393 2.19156 3.75393L2.19156 3.49393L2.18156 3.49393L2.00156 3.49393Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 45' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87895 0.530273L9.87895 0.374286C9.87895 0.337289 9.89095 0.289293 9.90395 0.253296L8.45593 0.253296C8.46793 0.289293 8.47993 0.32529 8.47993 0.374286L8.47993 0.530273L8.49193 0.530273L9.87895 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 46' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64417 3.49817L4.64417 3.73917C4.64417 3.75117 4.64417 3.76317 4.64417 3.76317L6.03117 3.76317C6.03117 3.75117 6.03117 3.73917 6.03117 3.73917L6.03117 3.49817L4.64417 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 47' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.17943 0.533305L2.17943 0.3733C2.17943 0.333299 2.19943 0.293297 2.20943 0.253296L1.99943 0.253296C1.11943 0.253296 0.409429 0.903318 0.289429 1.75335L0.559429 1.75335C0.67943 1.06332 1.27943 0.533305 1.99943 0.533305L2.17943 0.533305Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 48' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.49207 3.49817L8.49207 3.73917C8.49207 3.75117 8.49207 3.76317 8.49207 3.76317L9.87907 3.76317C9.87907 3.75117 9.87907 3.73917 9.87907 3.73917L9.87907 3.49817L8.49207 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 49' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.72607 3.49817L2.72607 3.73917C2.72607 3.75117 2.72607 3.76317 2.72607 3.76317L4.11308 3.76317C4.11308 3.75117 4.11308 3.73917 4.11308 3.73917L4.11308 3.49817L2.72607 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 50' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.9489 0.530273L7.9489 0.374286C7.9489 0.337289 7.9609 0.289293 7.9739 0.253296L6.52588 0.253296C6.53788 0.289293 6.54988 0.32529 6.54988 0.374286L6.54988 0.530273L6.56188 0.530273L7.9489 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 51' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03093 0.530273L6.03093 0.374286C6.03093 0.337289 6.04293 0.289293 6.05593 0.253296L4.60791 0.253296C4.61991 0.289293 4.63191 0.32529 4.63191 0.374286L4.63191 0.530273L4.64391 0.530273L6.03093 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 52' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.6881 1.75739L11.8981 1.75739C11.9181 1.75739 11.9381 1.75739 11.9681 1.77739C11.8581 0.977367 11.2081 0.337346 10.3981 0.277344C10.4081 0.317345 10.4181 0.347346 10.4181 0.387347L10.4181 0.547353L10.4081 0.547353C11.0581 0.617355 11.5781 1.11737 11.6881 1.75739Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 53' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.11296 0.530273L4.11296 0.374286C4.11296 0.337289 4.12496 0.289293 4.13796 0.253296L2.68994 0.253296C2.70194 0.289293 2.71394 0.32529 2.71394 0.374286L2.71394 0.530273L2.72594 0.530273L4.11296 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 54' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.41 3.48185L10.41 3.74184C10.41 3.75184 10.41 3.75184 10.41 3.76184C11.21 3.69184 11.85 3.07186 11.95 2.29187C11.93 2.29187 11.91 2.30187 11.89 2.30187L11.69 2.30187L11.69 2.29187C11.57 2.92186 11.06 3.40185 10.41 3.48185Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 55' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64417 2.29149L6.03117 2.29149L6.03117 2.02649L4.64417 2.02649L4.64417 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 56' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.49207 2.02611L9.87907 2.02611L9.87907 1.76111L8.49207 1.76111L8.49207 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 57' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56201 2.02611L7.94902 2.02611L7.94902 1.76111L6.56201 1.76111L6.56201 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 58' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56201 2.29149L7.94902 2.29149L7.94902 2.02649L6.56201 2.02649L6.56201 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 59' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.7131 2.02611ZM11.7131 2.00211C11.7131 1.91811 11.7011 1.84511 11.6891 1.76111L10.41 1.76111L10.41 2.02611L11.7131 2.02611L11.7131 2.00211Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 60' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64417 2.02611L6.03117 2.02611L6.03117 1.76111L4.64417 1.76111L4.64417 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 61' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.6891 2.07463C11.7011 1.94163 11.7131 1.80964 11.7131 1.67664L10.41 1.67664L10.41 2.07463L11.6891 2.07463Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 62' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.49207 2.29149L9.87907 2.29149L9.87907 2.02649L8.49207 2.02649L8.49207 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 63' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.72607 2.02611L4.11308 2.02611L4.11308 1.76111L2.72607 1.76111L2.72607 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 64' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.530762 2.02611ZM0.530762 2.00211L0.530762 2.02611L2.18377 2.02611L2.18377 1.76111L0.554762 1.76111C0.542762 1.84511 0.530762 1.91811 0.530762 2.00211Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 65' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.72607 2.29149L4.11308 2.29149L4.11308 2.02649L2.72607 2.02649L2.72607 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 66' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18377 2.02649L0.530762 2.02649C0.530762 2.12349 0.542762 2.20749 0.554762 2.29149L2.18377 2.29149L2.18377 2.02649Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 67' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.9541 2.28024C12.0751 2.25523 12.1591 2.14722 12.1591 2.02621C12.1591 1.9062 12.0751 1.7972 11.9661 1.77319C11.9781 1.8452 11.9781 1.93021 11.9781 2.00221L11.9781 2.02621C11.9781 2.11122 11.9661 2.19523 11.9541 2.28024Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 68' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.289955 2.29211C0.276957 2.20711 0.264958 2.11111 0.264958 2.02611L0.264958 2.00211C0.264958 1.91811 0.276957 1.84511 0.289955 1.76111L0.264958 1.76111C0.120981 1.76111 0 1.88211 0 2.02611C0 2.17111 0.120981 2.29211 0.264958 2.29211L0.289955 2.29211Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 69' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.7127 2.02611ZM11.7127 2.00211L11.7127 2.02611C11.7127 2.12311 11.7007 2.20711 11.6887 2.29211L11.8937 2.29211C11.9177 2.29211 11.9417 2.29211 11.9537 2.28011C11.9657 2.19511 11.9787 2.11111 11.9787 2.02611L11.9787 2.00211C11.9787 1.91811 11.9657 1.84511 11.9657 1.77311C11.9417 1.76111 11.9177 1.76111 11.8937 1.76111L11.6887 1.76111C11.7007 1.84511 11.7127 1.91811 11.7127 2.00211Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 70' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.530339 2.02611ZM0.530339 2.00211C0.530339 1.91811 0.542337 1.84511 0.555335 1.76111L0.289377 1.76111C0.277379 1.84511 0.265381 1.91811 0.265381 2.00211L0.265381 2.02611L0.530339 2.02611L0.530339 2.00211Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 71' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.277344 2.02649C0.277344 2.12349 0.289342 2.20749 0.30134 2.29149L0.567298 2.29149C0.542302 2.20749 0.542302 2.12349 0.542302 2.02649L0.277344 2.02649Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 72' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 1.76069L2.44835 1.76069L2.44835 0.53064L2.18335 0.53064L2.18335 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 73' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 3.48587L2.44835 3.48587L2.44835 2.29187L2.18335 2.29187L2.18335 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 74' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.46069 1.76069L2.72569 1.76069L2.72569 0.53064L2.46069 0.53064L2.46069 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 75' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.46069 3.48587L2.72569 3.48587L2.72569 2.29187L2.46069 2.29187L2.46069 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 76' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.72631 3.76355L2.19531 3.76355C2.20731 3.89657 2.31631 4.00459 2.46031 4.00459C2.59331 4.00459 2.71431 3.89657 2.72631 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 77' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.21948 0.277561L2.70245 0.277561C2.65345 0.180588 2.55746 0.120605 2.46046 0.120605C2.35247 0.120605 2.26748 0.180588 2.21948 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 78' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.19531 3.76317L2.72631 3.76317C2.72631 3.75117 2.72631 3.73917 2.72631 3.73917L2.72631 3.49817L2.46031 3.49817L2.19531 3.49817L2.19531 3.73917C2.19531 3.75117 2.19531 3.76317 2.19531 3.76317Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 79' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71435 0.374286C2.71435 0.337289 2.70235 0.289293 2.69035 0.253296L2.20735 0.253296C2.19535 0.289293 2.18335 0.32529 2.18335 0.374286L2.18335 0.530273L2.44835 0.530273L2.71435 0.530273L2.71435 0.374286Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 80' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 2.29149L2.44835 2.29149L2.44835 2.02649L2.18335 2.02649L2.18335 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 81' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 2.02611L2.44835 2.02611L2.44835 1.76111L2.18335 1.76111L2.18335 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 82' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.46069 2.02611L2.72569 2.02611L2.72569 1.76111L2.46069 1.76111L2.46069 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 83' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.46069 2.29149L2.72569 2.29149L2.72569 2.02649L2.46069 2.02649L2.46069 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 84' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.37866 3.48587L4.64366 3.48587L4.64366 2.29187L4.37866 2.29187L4.37866 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 85' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.37866 1.76069L4.64366 1.76069L4.64366 0.53064L4.37866 0.53064L4.37866 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 86' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.11328 1.76069L4.37828 1.76069L4.37828 0.53064L4.11328 0.53064L4.11328 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 87' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.11328 3.48587L4.37828 3.48587L4.37828 2.29187L4.11328 2.29187L4.11328 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 88' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.13745 0.277561L4.62042 0.277561C4.57142 0.180588 4.48743 0.120605 4.37843 0.120605C4.27044 0.120605 4.18545 0.180588 4.13745 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 89' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64428 3.76355L4.11328 3.76355C4.12528 3.89657 4.23428 4.00459 4.37828 4.00459C4.51128 4.00459 4.63228 3.89657 4.64428 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 90' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.37828 3.49817L4.11328 3.49817L4.11328 3.73917C4.11328 3.75117 4.11328 3.76317 4.11328 3.76317L4.64428 3.76317C4.64428 3.75117 4.64428 3.73917 4.64428 3.73917L4.64428 3.49817L4.37828 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 91' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64428 0.530273L4.64428 0.374286C4.64428 0.337289 4.63228 0.289293 4.62028 0.253296L4.13728 0.253296C4.12528 0.289293 4.11328 0.32529 4.11328 0.374286L4.11328 0.530273L4.37828 0.530273L4.64428 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 92' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.11328 2.02611L4.37828 2.02611L4.37828 1.76111L4.11328 1.76111L4.11328 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 93' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.11328 2.29149L4.37828 2.29149L4.37828 2.02649L4.11328 2.02649L4.11328 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 94' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.37866 2.02611L4.64366 2.02611L4.64366 1.76111L4.37866 1.76111L4.37866 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 95' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.37866 2.29149L4.64366 2.29149L4.64366 2.02649L4.37866 2.02649L4.37866 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 96' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29675 1.76069L6.56175 1.76069L6.56175 0.53064L6.29675 0.53064L6.29675 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 97' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 3.48587L6.29637 3.48587L6.29637 2.29187L6.03137 2.29187L6.03137 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 98' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 1.76069L6.29637 1.76069L6.29637 0.53064L6.03137 0.53064L6.03137 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 99' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29675 3.48587L6.56175 3.48587L6.56175 2.29187L6.29675 2.29187L6.29675 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 100' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56237 3.76355L6.03137 3.76355C6.05537 3.89657 6.16437 4.00459 6.29637 4.00459C6.42937 4.00459 6.55037 3.89657 6.56237 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 101' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.05542 0.277561L6.53838 0.277561C6.50139 0.180588 6.40539 0.120605 6.2964 0.120605C6.18841 0.120605 6.10342 0.180588 6.05542 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 102' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 3.73917C6.03137 3.75117 6.03137 3.76317 6.03137 3.76317L6.56237 3.76317C6.56237 3.75117 6.56237 3.73917 6.56237 3.73917L6.56237 3.49817L6.29637 3.49817L6.03137 3.49817L6.03137 3.73917Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 103' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 0.530273L6.29637 0.530273L6.56237 0.530273L6.56237 0.374286C6.56237 0.337289 6.55037 0.289293 6.53837 0.253296L6.05537 0.253296C6.04337 0.289293 6.03137 0.32529 6.03137 0.374286L6.03137 0.530273Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 104' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29675 2.29149L6.56175 2.29149L6.56175 2.02649L6.29675 2.02649L6.29675 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 105' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 2.29149L6.29637 2.29149L6.29637 2.02649L6.03137 2.02649L6.03137 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 106' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29675 2.02611L6.56175 2.02611L6.56175 1.76111L6.29675 1.76111L6.29675 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 107' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03137 2.02611L6.29637 2.02611L6.29637 1.76111L6.03137 1.76111L6.03137 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 108' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94922 3.48587L8.21422 3.48587L8.21422 2.29187L7.94922 2.29187L7.94922 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 109' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.22668 3.48587L8.49168 3.48587L8.49168 2.29187L8.22668 2.29187L8.22668 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 110' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.22668 1.76069L8.49168 1.76069L8.49168 0.53064L8.22668 0.53064L8.22668 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 111' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94922 1.76069L8.21422 1.76069L8.21422 0.53064L7.94922 0.53064L7.94922 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 112' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.4923 3.76355L7.9613 3.76355C7.9733 3.89657 8.0823 4.00459 8.2263 4.00459C8.3593 4.00459 8.4803 3.89657 8.4923 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 113' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.98547 0.277561L8.46844 0.277561C8.41944 0.180588 8.32345 0.120605 8.22646 0.120605C8.11846 0.120605 8.03347 0.180588 7.98547 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 114' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.9613 3.49817L7.9613 3.73917C7.9613 3.75117 7.9613 3.76317 7.9613 3.76317L8.4923 3.76317C8.4923 3.75117 8.4923 3.73917 8.4923 3.73917L8.4923 3.49817L8.2263 3.49817L7.9613 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 115' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.45622 0.253296L7.97322 0.253296C7.96122 0.289293 7.94922 0.32529 7.94922 0.374286L7.94922 0.530273L8.21422 0.530273L8.48022 0.530273L8.48022 0.374286C8.48022 0.337289 8.46822 0.289293 8.45622 0.253296Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 116' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94922 2.29149L8.21422 2.29149L8.21422 2.02649L7.94922 2.02649L7.94922 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 117' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.22668 2.02611L8.49168 2.02611L8.49168 1.76111L8.22668 1.76111L8.22668 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 118' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.22668 2.29149L8.49168 2.29149L8.49168 2.02649L8.22668 2.02649L8.22668 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 119' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94922 2.02611L8.21422 2.02611L8.21422 1.76111L7.94922 1.76111L7.94922 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 120' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 1.76069L10.1443 1.76069L10.1443 0.53064L9.87927 0.53064L9.87927 1.76069Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 121' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 3.48576L10.2417 3.48576C10.3017 3.48576 10.3497 3.48576 10.4097 3.47376L10.4097 2.27979L10.1447 2.27979L10.1447 2.29179L10.1447 3.48576Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 122' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 3.48587L10.1443 3.48587L10.1443 2.29187L9.87927 2.29187L9.87927 3.48587Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 123' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.4097 0.54264C10.3497 0.53064 10.3017 0.53064 10.2417 0.53064L10.1447 0.53064L10.1447 1.76069L10.4097 1.76069L10.4097 0.54264Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 124' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1444 0.120605C10.0364 0.120605 9.95144 0.180588 9.90344 0.277561L10.2414 0.277561C10.2894 0.265564 10.3374 0.265564 10.3864 0.277561C10.3494 0.180588 10.2534 0.120605 10.1444 0.120605Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 125' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 3.77555L9.88027 3.77555C9.88027 3.77155 9.87927 3.76755 9.87927 3.76355L9.87927 3.77555ZM10.1443 4.00459C10.2893 4.00459 10.3983 3.89657 10.4103 3.76355C10.3493 3.76355 10.3013 3.77555 10.2413 3.77555L9.88027 3.77555C9.89827 3.90258 10.0163 4.00459 10.1443 4.00459Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 126' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 3.73906C9.87927 3.75106 9.87927 3.76306 9.87927 3.76306L10.2413 3.76306C10.3013 3.76306 10.3493 3.76306 10.4103 3.75106C10.4103 3.73906 10.4103 3.73906 10.4103 3.72706L10.4103 3.48608C10.3493 3.49808 10.3013 3.49808 10.2413 3.49808L10.1443 3.49808L9.87927 3.49808L9.87927 3.73906Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 127' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.2413 0.530359C10.3013 0.530359 10.3493 0.530359 10.4103 0.542358L10.4103 0.386371C10.4103 0.349374 10.3983 0.313377 10.3863 0.27738C10.3373 0.27738 10.2893 0.265381 10.2413 0.265381L9.90327 0.265381C9.89127 0.301378 9.87927 0.337375 9.87927 0.386371L9.87927 0.530359L10.1443 0.530359L10.2413 0.530359Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 128' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 2.29149L10.4097 2.29149L10.4097 2.02649L10.1447 2.02649L10.1447 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 129' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 2.29149L10.1443 2.29149L10.1443 2.02649L9.87927 2.02649L9.87927 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 130' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 2.02611L10.4097 2.02611L10.4097 1.76111L10.1447 1.76111L10.1447 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 131' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87927 2.02611L10.1443 2.02611L10.1443 1.76111L9.87927 1.76111L9.87927 2.02611Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 132' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.65 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.5374755859375 2.7020263671875) rotate(0)'%3e%3cg opacity='1' transform='translate(4.0596923828125 6.272705078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 133' fill-rule='evenodd' style='fill:white' opacity='1' d='M1.09999 0C0.489996 0 0 0.830007 0 1.85002C0 2.86002 0.489996 3.69003 1.09999 3.69003C1.69999 3.69003 2.19998 2.86002 2.19998 1.85002C2.19998 0.830007 1.69999 0 1.09999 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.2972412109375 6.272705078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 134' fill-rule='evenodd' style='fill:white' opacity='1' d='M1.09999 0C0.489996 0 0 0.830007 0 1.85002C0 2.86002 0.489996 3.69003 1.09999 3.69003C1.69999 3.69003 2.19998 2.86002 2.19998 1.85002C2.19998 0.830007 1.69999 0 1.09999 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.34912109375 6.7672119140625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 135' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.809975 0C0.359989 0 0 0.600005 0 1.35001C0 2.10002 0.359989 2.70002 0.809975 2.70002C1.24996 2.70002 1.61995 2.10002 1.61995 1.35001C1.61995 0.600005 1.24996 0 0.809975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.5867919921875 6.7672119140625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 136' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.809975 0C0.359989 0 0 0.600005 0 1.35001C0 2.10002 0.359989 2.70002 0.809975 2.70002C1.24996 2.70002 1.61995 2.10002 1.61995 1.35001C1.61995 0.600005 1.24996 0 0.809975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(14.083740234375 1.3148193359375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 137' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.860002 0C0.360001 0 0 1.85002 0 2.74003C0 3.63004 0.430001 3.88004 0.930003 3.88004C1.42 3.88004 1.79001 3.63004 1.79001 2.74003C1.79001 1.85002 1.35 0 0.860002 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.824462890625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 138' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.660003 0C0.290001 0 0 1.44002 0 2.14002C0 2.83003 0.340002 3.03003 0.720003 3.03003C1.11001 3.03003 1.39001 2.83003 1.39001 2.14002C1.39001 1.44002 1.06 0 0.660003 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.334716796875 1.978271484375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 139' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.660003 0C0.290001 0 0 1.42003 0 2.12004C0 2.82005 0.340002 3.02006 0.720003 3.02006C1.11001 3.02006 1.39001 2.82005 1.39001 2.12004C1.39001 1.42003 1.04 0 0.660003 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(5.82080078125 1.652587890625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 140' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.457977 0C0.19299 0 0 0.976981 0 1.45997C0 1.94196 0.228989 2.07496 0.494975 2.07496C0.759962 2.07496 0.952952 1.94196 0.952952 1.45997C0.952952 0.976981 0.723964 0 0.457977 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.12841796875 2.5211181640625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 141' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.457977 0C0.19299 0 0 0.976981 0 1.45997C0 1.94196 0.228989 2.07496 0.494975 2.07496C0.759962 2.07496 0.952952 1.94196 0.952952 1.45997C0.952952 0.988981 0.723964 0 0.457977 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 142' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.420016 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.290771484375 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 143' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.400015 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.5814208984375 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 144' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.400015 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(12.943359375 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 145' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.400015 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(14.2340087890625 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 146' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.400015 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(15.5247802734375 10.3916015625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 147' fill-rule='evenodd' style='fill:%23E5183E' opacity='1' d='M0.560021 2.01996L1.36005 0.429991C1.43005 0.279994 1.37005 0.0999979 1.22005 0.0299994C1.08004 -0.0399992 0.900034 0.0199996 0.830032 0.159997L0.0300011 1.75996C-0.0400015 1.89996 0.0200008 2.07996 0.160006 2.14996C0.210008 2.17996 0.25001 2.18995 0.300011 2.18995C0.400015 2.18995 0.510019 2.12996 0.560021 2.01996Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 154' fill-rule='evenodd' style='fill:%23EF7C00' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25001 0C2.35001 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35001 20 5.25001 20L14.75 20C17.66 20 20.01 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.2666015625 6.351318359375) rotate(0)'%3e%3cg opacity='1' transform='translate(2.498291015625 5.216796875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 155' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.49002 2.54995C6.29002 1.10998 4.91001 0 3.25001 0C1.58 0 0.210001 1.10998 0 2.54995C-0.0200001 2.70994 0.15 2.85994 0.300001 2.79994L1.87001 2.21995C2.75001 1.88996 3.71001 1.88996 4.59001 2.21995L6.19002 2.79994C6.36002 2.85994 6.52002 2.72994 6.49002 2.54995Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(1.7406005859375 1.380859375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 156' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.679975 0C0.299989 0 0 0.509993 0 1.12999C0 1.75998 0.299989 2.26997 0.679975 2.26997C1.04996 2.26997 1.34995 1.75998 1.34995 1.12999C1.34995 0.509993 1.04996 0 0.679975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.4354248046875 1.380859375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 157' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.679975 0C0.299989 0 0 0.509993 0 1.12999C0 1.75998 0.299989 2.26997 0.679975 2.26997C1.04996 2.26997 1.34995 1.75998 1.34995 1.12999C1.34995 0.509993 1.04996 0 0.679975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 158' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.32999 1.60002L3.26999 1.36002C3.25999 1.32002 3.24999 1.28002 3.23999 1.26002C2.83999 0.620009 1.84999 0.130002 1.84999 0.130002C0.959997 -0.210003 0.199999 0.230003 0.199999 0.230003C-0.0799997 0.390006 -0.00999997 0.600009 0.0799997 0.720011C0.11 0.780011 0.179999 0.810012 0.269999 0.810012C1.82999 0.830012 2.77999 1.39002 3.17999 1.69002C3.24999 1.75003 3.34999 1.69002 3.32999 1.60002Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.1424560546875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 159' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.06995 0.810012C3.14995 0.810012 3.21995 0.780011 3.25995 0.720011C3.33995 0.600009 3.41995 0.390006 3.13995 0.230003C3.13995 0.230003 2.37996 -0.210003 1.48998 0.130002C1.48998 0.130002 0.499992 0.620009 0.0999984 1.26002C0.0899986 1.28002 0.0799987 1.32002 0.0599991 1.36002L0 1.60002C-0.0199997 1.69002 0.0899986 1.75003 0.159997 1.69002C0.559991 1.39002 1.50998 0.830012 3.06995 0.810012Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 385' fill-rule='evenodd' style='fill:%23FADA4B' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.76 20C17.66 20 20.01 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(5.40411376953125 2.919189453125) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 386' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.05 0C0.920002 0 0 0.920002 0 2.05C0 3.18001 0.920002 4.10001 2.05 4.10001C3.18001 4.10001 4.10001 3.18001 4.10001 2.05C4.10001 0.920002 3.18001 0 2.05 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.4185791015625 1.157958984375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 387' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.890003 0C0.400001 0 0 0.400001 0 0.890003C0 1.39 0.400001 1.79001 0.890003 1.79001C1.39 1.79001 1.79001 1.39 1.79001 0.890003C1.79001 0.400001 1.39 0 0.890003 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(3.87213134765625 5.8021240234375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 388' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.83001 0C0.820004 0 0 1.85001 0 4.13003C0 6.40004 0.820004 8.25005 1.83001 8.25005C2.85001 8.25005 3.67002 6.40004 3.67002 4.13003C3.67002 1.85001 2.85001 0 1.83001 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 355' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.66 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.7286376953125 6.57421875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 356' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.829992 0C0.369996 0 0 0.629993 0 1.39998C0 2.16998 0.369996 2.79997 0.829992 2.79997C1.28999 2.79997 1.65998 2.16998 1.65998 1.39998C1.65998 0.629993 1.28999 0 0.829992 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.9937744140625 0.234130859375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 357' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.12998 0.250007C0.939982 0.330009 0.739986 0.37001 0.549989 0.440012C0.429992 0.490013 0.319994 0.540014 0.209996 0.610016C-0.309994 1.00003 0.259995 1.47004 0.619988 1.70004C1.01998 1.95005 1.65997 2.38006 2.14996 2.29006C2.21996 2.27006 2.30995 2.24006 2.33995 2.17006C2.51995 1.84005 2.00996 1.68004 1.79996 1.60004C1.63997 1.53004 1.33997 1.38004 1.34997 1.17003C1.34997 1.10003 1.39997 1.04003 1.43997 1.01003C1.74997 0.710019 2.41995 0.790021 2.53995 0.300008C2.54995 0.220006 2.54995 0.150004 2.49995 0.100003C2.44995 0.0600016 2.38995 0.0300008 2.31995 0.0200005C1.90996 -0.0500013 1.49997 0.0900024 1.12998 0.250007Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.3988037109375 5.102294921875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 358' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.0700004 2.49997C0.280002 2.63997 0.540003 2.66997 0.790005 2.69997C1.06001 2.73997 1.35001 2.76997 1.64001 2.79997C2.25001 2.82997 2.86002 2.80997 3.46002 2.67997C4.57003 2.43997 5.65003 1.80998 6.26004 0.82999C6.36004 0.679992 6.67004 0.249997 6.54004 0.0599993C6.39004 -0.139998 6.19004 0.229997 6.12004 0.329996C6.01004 0.449995 5.90004 0.569993 5.78003 0.689992C5.53003 0.939989 5.24003 1.15999 4.92003 1.34998C3.81002 2.03998 2.43001 2.27997 1.14001 2.17997C0.920006 2.16997 0.700004 2.13997 0.480003 2.11997C0.350002 2.10997 0.170001 2.10997 0.0600004 2.20997C-0.0200001 2.28997 -0.0200001 2.41997 0.0700004 2.49997Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 9' fill-rule='evenodd' style='fill:%23A6D9E4' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.65 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.718017578125 6.55224609375) rotate(0)'%3e%3cg opacity='1' transform='translate(1.02392578125 4.243896484375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 10' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.27 2.9C7.83 1.23 6.15 0 4.15 0C2.15 0 0.47 1.24 0.02 2.9C-0.1 3.34 0.25 3.78 0.71 3.78L3.33 3.43C3.85 3.35 4.38 3.35 4.91 3.43L7.59 3.78C8.05 3.78 8.4 3.34 8.27 2.9Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 11' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486622 2.2985 1.09003 2.44098C1.69345 2.58346 2.29497 2.21175 2.43746 1.60834C2.57994 1.00492 2.20822 0.403396 1.60481 0.260914C1.0014 0.118431 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.8685302734375 0.004150390625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 12' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486622 2.2985 1.09003 2.44098C1.69345 2.58346 2.29497 2.21175 2.43746 1.60834C2.57994 1.00492 2.20822 0.403396 1.60481 0.260914C1.0014 0.118431 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 366' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.65 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.4693603515625 5.3973388671875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 4.1456298828125) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.328369140625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 367' fill-rule='evenodd' style='fill:%23EF8FB4' opacity='1' d='M0.198641 1.2288C0.0897088 1.9 0.552756 2.54247 1.22396 2.6514C1.90504 2.76193 2.53763 2.29728 2.64656 1.62608C2.7571 0.945005 2.30232 0.314013 1.62124 0.203478C0.950038 0.0945463 0.309175 0.547723 0.198641 1.2288Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(13.879638671875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 368' fill-rule='evenodd' style='fill:%23EF8FB4' opacity='1' d='M0.876825 0.880255C0.395985 1.36109 0.395985 2.15307 0.876825 2.6339C1.36474 3.12182 2.14964 3.11474 2.63047 2.6339C3.11838 2.14599 3.11838 1.36817 2.63047 0.880255C2.14964 0.399416 1.36474 0.392345 0.876825 0.880255Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(5.152099609375 6.2431640625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 369' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.909995 0C0.229999 0 -0.199999 0.699988 0.0999995 1.29998C0.649997 2.41996 1.91999 3.20994 3.38998 3.20994C4.85998 3.20994 6.12997 2.41996 6.67997 1.29998C6.96997 0.699988 6.53997 0 5.87997 0L0.909995 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.3428955078125 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 370' fill-rule='evenodd' style='fill:%23E60012' opacity='1' d='M2.42 1.15999C2.41 1.26999 2.3 1.32999 2.22 1.26999C2.13 1.20999 2.04 1.15999 1.95 1.12999C1.72 1.01999 1.48 0.949993 1.23 0.939993C0.77 0.909993 0.2 1.05999 0.05 1.53999C-0.16 2.16998 0.34 2.86998 0.76 3.28997C0.860001 3.37997 0.950001 3.47997 1.06 3.56997C1.44 3.87997 1.88 4.12997 2.33 4.30997C2.7 4.47997 3.14 4.56996 3.44 4.22997C3.61 4.03997 3.7 3.77997 3.82 3.54997C4.03 3.12998 4.21 2.69998 4.35 2.24998C4.56 1.60999 4.61 0.889993 4.13 0.359997C3.82 0.0299998 3.38 -0.109999 2.97 0.0999992C2.59 0.309998 2.45 0.739994 2.42 1.15999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.8614501953125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 371' fill-rule='evenodd' style='fill:%23E60012' opacity='1' d='M3.44 3.56997C3.55 3.47997 3.65 3.37997 3.74 3.28997C4.16 2.86998 4.66 2.16998 4.45 1.53999C4.3 1.05999 3.73 0.909993 3.27 0.939993C3.02 0.949993 2.78 1.01999 2.55 1.12999C2.46 1.15999 2.37 1.20999 2.28 1.26999C2.2 1.32999 2.09 1.26999 2.08 1.15999C2.05 0.739994 1.91 0.309998 1.54 0.0999992C1.12 -0.109999 0.68 0.0299998 0.38 0.359997C-0.11 0.889993 -0.06 1.60999 0.15 2.24998C0.29 2.69998 0.47 3.12998 0.68 3.54997C0.8 3.77997 0.900001 4.03997 1.06 4.22997C1.37 4.56996 1.8 4.47997 2.17 4.30997C2.63 4.12997 3.07 3.87997 3.44 3.56997Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 293' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.66 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 5.34375) rotate(0)'%3e%3cg opacity='1' transform='translate(3.739501953125 1.23046875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 294' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.80001 4.49003C4.72001 4.49003 5.45002 3.75002 5.45002 2.83002L5.45002 2.40002L7.06002 2.40002L7.06002 2.83002C7.06002 3.75002 7.79002 4.49003 8.71002 4.49003L10.86 4.49003C11.77 4.49003 12.51 3.75002 12.51 2.83002L12.51 1.65001C12.52 0.740005 11.77 0 10.86 0L8.71002 0C7.82002 0 7.08002 0.710005 7.06002 1.60001L5.45002 1.60001C5.43002 0.710005 4.69001 0 3.80001 0L1.65 0C0.740002 0 0 0.740005 0 1.65001L0 2.83002C0 3.75002 0.740002 4.49003 1.65 4.49003L3.80001 4.49003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.38037109375 1.613525390625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 295' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.564009 0.0149993C0.419007 -0.0329985 0.275005 0.0389982 0.214004 0.171992L0.0210004 0.62997C-0.0390007 0.774964 0.0330006 0.943956 0.178003 1.00395L0.383006 1.07695C0.528009 1.13695 0.685012 1.06495 0.745013 0.919957L0.938016 0.448979C0.998017 0.304986 0.914015 0.123994 0.757013 0.0749965L0.564009 0.0149993Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(15.7222900390625 1.613525390625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 296' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.0200003 0.448979L0.213004 0.919957C0.273005 1.06495 0.430007 1.13695 0.57401 1.07695L0.779013 1.00395C0.924016 0.943956 0.997017 0.774964 0.936016 0.62997L0.743012 0.171992C0.683012 0.0389982 0.538009 -0.0329985 0.393007 0.0149993L0.200003 0.0749965C0.0440007 0.123994 -0.0410007 0.304986 0.0200003 0.448979Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 297' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0 0L0 0.810005L3.39997 2.24001L3.58997 1.79001L0 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(16.3812255859375 0.0120849609375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 298' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.190002 2.23004L3.62004 0.810013L3.62004 0L0 1.77003L0.190002 2.23004Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(6.592041015625 7.0860595703125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 299' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.320002 2.84003C0.490003 3.00004 0.670004 3.13004 0.860005 3.23004C1.67001 3.65004 2.66002 3.66004 3.55002 3.65004C4.37003 3.64004 5.23003 3.55004 6.01004 3.31004C6.69004 3.11004 7.26005 2.71003 7.75005 2.23003C8.31005 1.70002 8.81005 1.04001 8.96006 0.280003C8.98005 0.200002 8.98005 0.0900011 8.91006 0.0400005C8.68005 -0.110001 8.31005 0.200002 8.14005 0.320004C7.83005 0.540007 7.56005 0.79001 7.23004 0.980012C6.73004 1.29002 6.04004 1.37002 5.46003 1.47002C4.40003 1.62002 3.31002 1.65002 2.24001 1.64002C1.94001 1.64002 1.63001 1.61002 1.32001 1.61002C1.09001 1.61002 0.850005 1.61002 0.600004 1.61002C0.420003 1.62002 0.220001 1.68002 0.100001 1.83002C-0.0100001 1.96002 -0.0200001 2.15003 0.0200001 2.32003C0.0700004 2.52003 0.180001 2.71003 0.320002 2.84003Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 379' fill-rule='evenodd' style='fill:%239FA0A0' opacity='1' d='M20.01 14.75L20.01 5.25C20.01 2.35 17.66 0 14.76 0L5.24999 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.24999 20L14.76 20C17.66 20 20.01 17.65 20.01 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.2965087890625 6.217529296875) rotate(0)'%3e%3cg opacity='1' transform='translate(2.3990478515625 1.2200927734375) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.123046875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 380' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486622 2.2985 1.09003 2.44098C1.69345 2.58346 2.29497 2.21175 2.43746 1.60834C2.57994 1.00492 2.20822 0.403396 1.60481 0.260914C1.0014 0.118431 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.7452392578125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 381' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.03474 0.430031C0.461937 0.667298 0.191344 1.32058 0.428612 1.89338C0.665879 2.46618 1.31916 2.73677 1.89196 2.49951C2.46476 2.26224 2.73535 1.60896 2.49809 1.03616C2.26082 0.463356 1.60754 0.192764 1.03474 0.430031Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0.748046875 4.87548828125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 382' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.20001 2.06C5.68002 1.2 8.55003 1.26 11.02 2.1C11.91 2.42001 12.77 2.85001 13.52 3.43001C13.75 3.61001 14.18 3.99001 14.46 3.64001C14.62 3.43001 14.48 3.09001 14.37 2.90001C14.11 2.43001 13.65 2.1 13.23 1.79C12.67 1.38 12.06 1.05 11.42 0.790002C10.33 0.340001 9.16003 0.11 7.99003 0.0300001C7.55002 0 7.11002 -0.01 6.67002 0C6.65002 0 6.64002 0 6.63002 0C6.00002 0.0300001 5.38002 0.0900002 4.76002 0.2C3.58001 0.400001 2.43001 0.810002 1.38 1.39C1.27 1.45 1.15 1.52 1.04 1.58C0.670002 1.81 0.310001 2.04 0.0900003 2.44001C0.0200001 2.59001 -0.0300001 2.76001 0.0200001 2.91001C0.1 3.18001 0.380001 3.27001 0.630002 3.23001C1.03 3.14001 1.36 2.91001 1.70001 2.72001C2.06001 2.51 2.44001 2.33 2.83001 2.18C2.95001 2.15 3.07001 2.1 3.20001 2.06Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0.1278076171875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 383' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M5.87997 0.699997C5.84997 0.459998 5.74997 0.229999 5.61997 0.0199999C5.46997 -0.189999 2.55998 1.14999 2.25999 1.28999C1.54999 1.62999 0.779995 1.99999 0.0799995 2.45999C-0.0999994 2.57999 0.0599996 2.85999 0.249999 2.76999C0.979994 2.47999 1.71999 2.12999 2.45999 1.87999C3.53998 1.50999 4.63997 1.17999 5.75997 0.889996C5.84997 0.869996 5.90997 0.779997 5.87997 0.699997Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.6634521484375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 384' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.31997 2.06998C4.04997 2.36998 4.75996 2.76997 5.46996 3.10997C5.65996 3.19997 5.82995 2.92997 5.65996 2.80997C4.99996 2.30998 4.24997 1.88998 3.55997 1.49999C3.28997 1.34999 0.459996 -0.189998 0.309998 0.0199998C0.159999 0.219998 0.0699995 0.439996 0.00999992 0.679994C-0.0199998 0.769993 0.0299998 0.859992 0.109999 0.889992C1.20999 1.24999 2.28998 1.64998 3.31997 2.06998Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 372' fill-rule='evenodd' style='fill:%23A6D9E4' opacity='1' d='M20 14.75L20 5.25C20 2.35 17.65 0 14.75 0L5.25 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.25 20L14.75 20C17.65 20 20 17.65 20 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.58154296875 3.374267578125) rotate(0)'%3e%3cg opacity='1' transform='translate(2.9188232421875 2.970458984375) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.205078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 373' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.05001 2.03998C1.60001 2.02998 2.05002 1.55998 2.04002 0.98999C2.03002 0.429996 1.56001 -0.00999989 0.990008 0C0.430003 0.00999989 -0.0100001 0.479995 0 1.04999C0.0100001 1.61998 0.480004 2.05998 1.05001 2.03998Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.1531982421875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 374' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.05001 2.03998C1.60001 2.02998 2.05002 1.55998 2.04002 0.98999C2.03002 0.429996 1.56001 -0.00999989 0.990008 0C0.430003 0.00999989 -0.0100001 0.479995 0 1.04999C0.0200002 1.61998 0.490004 2.05998 1.05001 2.03998Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(4.4444580078125 6.8629150390625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 375' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.17003 0.899998C5.87002 0.529999 5.51002 -0.23 4.82002 0.0599999C4.67002 0.12 4.53002 0.21 4.39002 0.319999C3.90002 0.669999 3.46001 1.19 3.06001 1.56C2.38001 2.18 1.68001 2.76999 0.970004 3.34999C0.720003 3.53999 0.460002 3.73999 0.270001 3.99999C-0.0300001 4.37999 -0.0900004 4.71999 0.140001 5.01999C0.380002 5.31999 0.610003 5.62999 0.860004 5.90999C1.01 6.07999 1.16 6.24999 1.42001 6.24999C2.00001 6.24999 2.48001 5.69999 2.90001 5.29999C3.48001 4.76999 4.06002 4.24999 4.65002 3.72999C5.23002 3.21999 6.22003 2.59999 6.47003 1.87C6.60003 1.49 6.39003 1.16 6.17003 0.899998Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0.0142822265625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 376' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.24003 3.99999C6.05003 3.73999 5.79002 3.53999 5.54002 3.34999C4.83002 2.76999 4.13002 2.18 3.45001 1.56C3.06001 1.2 2.61001 0.669999 2.13001 0.319999C1.98001 0.21 1.84001 0.12 1.69001 0.0599999C1.01 -0.23 0.640003 0.529999 0.340001 0.899998C0.12 1.16 -0.0900004 1.49 0.0400002 1.87C0.290001 2.59999 1.28001 3.21999 1.86001 3.72999C2.45001 4.24999 3.03001 4.76999 3.61001 5.29999C4.03002 5.69999 4.52002 6.24999 5.09002 6.24999C5.35002 6.24999 5.50002 6.07999 5.65002 5.90999C5.90002 5.62999 6.13003 5.31999 6.37003 5.01999C6.60003 4.71999 6.54003 4.37999 6.24003 3.99999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0.4361572265625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 377' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M5.25996 2.16004C5.36995 1.97004 5.43995 1.75003 5.47995 1.53003C5.50995 1.29002 2.67998 0.53001 2.38998 0.460009C1.68999 0.280005 0.929992 0.0900017 0.179998 0C-0.00999992 -0.0200004 -0.0699994 0.270005 0.109999 0.330006C0.799993 0.560011 1.50999 0.740014 2.16998 0.990019C3.15997 1.35003 4.10997 1.77003 5.04996 2.22004C5.12996 2.26004 5.20996 2.23004 5.25996 2.16004Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.4322509765625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 378' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.24998 1.1C3.89997 0.809997 4.59997 0.579998 5.26997 0.319999C5.44996 0.239999 5.37996 -0.0299999 5.18997 0C4.44997 0.14 3.69998 0.379999 3.01998 0.589998C2.72998 0.689998 -0.0499997 1.61999 0 1.84999C0.0499997 2.06999 0.129999 2.27999 0.249998 2.45999C0.299998 2.51999 0.389997 2.54999 0.459997 2.50999C1.37999 2.00999 2.31998 1.55 3.24998 1.1Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 327' fill-rule='evenodd' style='fill:%2389B23C' opacity='1' d='M20.01 14.75L20.01 5.25C20.01 2.35 17.66 0 14.76 0L5.24999 0C2.35 0 0 2.35 0 5.25L0 14.75C0 17.65 2.35 20 5.24999 20L14.76 20C17.67 20 20.01 17.65 20.01 14.75Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.525390625 5.64306640625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 6.86376953125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 328' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.52001 1.34003C2.99001 1.68003 3.57001 2.10004 4.25001 1.82003C4.50001 1.74003 4.66001 1.58003 4.81001 1.45003C4.86001 1.40003 4.91001 1.35003 4.95001 1.32002C5.30001 1.04002 5.82001 0.980018 6.23001 1.15002C6.40002 1.22002 6.57002 1.34003 6.75002 1.46003C6.91002 1.57003 7.06002 1.68003 7.25002 1.78003C7.72002 2.02004 8.39002 2.14004 8.89002 1.72003C9.02002 1.61003 9.10002 1.47003 9.19002 1.37003C9.25002 1.28002 9.30002 1.21002 9.34002 1.17002C9.49002 1.06002 9.83002 1.17002 10.24 1.47003C10.72 1.81003 11.15 1.99004 11.53 1.99004C11.76 1.99004 11.97 1.92004 12.15 1.78003C12.3 1.67003 12.41 1.53003 12.49 1.43003C12.52 1.39003 12.54 1.35003 12.58 1.32002C12.79 1.08002 13.14 1.05002 13.41 1.11002C13.67 1.17002 13.99 1.34003 14.08 1.65003C14.16 1.88004 14.41 2.02004 14.64 1.94004C14.87 1.87004 15 1.62003 14.93 1.39003C14.75 0.820015 14.24 0.390007 13.6 0.240005C12.96 0.100002 12.32 0.290005 11.93 0.730014C11.89 0.770014 11.84 0.830016 11.81 0.880017C11.74 0.960018 11.7 1.02002 11.65 1.05002C11.5 1.16002 11.17 1.05002 10.74 0.740014C9.77002 0.0300006 9.15002 0.180003 8.80002 0.450008C8.64002 0.570011 8.54002 0.710013 8.45002 0.830016C8.40002 0.910017 8.36002 0.980018 8.31002 1.02002C8.16002 1.14002 7.86002 1.09002 7.64002 0.970018C7.51002 0.890017 7.38002 0.810015 7.23002 0.710013C7.03002 0.570011 6.81002 0.420008 6.56002 0.320006C5.86001 0.0100002 5.00001 0.130002 4.40001 0.610012C4.33001 0.670013 4.27001 0.730014 4.21001 0.770014C4.11001 0.870016 4.00001 0.960018 3.92001 0.990019C3.70001 1.08002 3.47001 0.940018 3.02001 0.620012C2.72001 0.400008 2.38001 0.160003 1.99 0.0500009C1.18 -0.170003 0.270001 0.340006 0.02 1.14002C-0.0500001 1.37003 0.0800002 1.62003 0.310001 1.69003C0.540001 1.76003 0.790002 1.63003 0.860002 1.40003C0.970002 1.05002 1.41 0.810015 1.77 0.910017C2.01 0.980018 2.25001 1.15002 2.52001 1.34003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.6319580078125 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 329' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.27 1.93999C1.32 2.21998 3.36999 1.86999 3.53999 0.559996C3.55999 0.339998 3.44999 -0.179999 3.13999 0.0599996C2.80999 0.329998 2.59 0.689995 2.26 0.939994C1.93 1.19999 1.55 1.33999 1.13 1.31999C0.849998 1.30999 0.559999 1.23999 0.289999 1.32999C0.0499999 1.40999 -0.0599999 1.61999 0.0299999 1.77999C0.0599999 1.84999 0.15 1.90999 0.27 1.93999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.92626953125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 330' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.24999 1.32999C2.97999 1.23999 2.69 1.30999 2.42 1.31999C1.99 1.33999 1.61 1.19999 1.28 0.939994C0.959998 0.689995 0.729999 0.329998 0.399999 0.0599996C0.0899998 -0.179999 -0.02 0.339998 0 0.559996C0.17 1.86999 2.22 2.21998 3.26999 1.93999C3.38999 1.90999 3.47999 1.84999 3.50999 1.77999C3.59999 1.61999 3.48999 1.40999 3.24999 1.32999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(3.089111328125 3.119384765625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 331' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.32995 0.610016C2.22996 0.540014 2.11996 0.490013 1.99996 0.440012C1.79996 0.37001 1.59997 0.320008 1.41997 0.250007C1.03998 0.0900024 0.629988 -0.0500013 0.219996 0.0200005C0.149997 0.0300008 0.0899982 0.0600016 0.0399992 0.100003C-0.0099998 0.150004 -0.0099998 0.220006 0.0099998 0.300008C0.129997 0.790021 0.789985 0.710019 1.09998 1.01003C1.13998 1.04003 1.18998 1.10003 1.18998 1.17003C1.19998 1.38004 0.899982 1.53004 0.739986 1.60004C0.539989 1.68004 0.0199996 1.84005 0.199996 2.17006C0.239995 2.24006 0.319994 2.27006 0.389992 2.29006C0.889983 2.38006 1.52997 1.95005 1.91996 1.70004C2.28996 1.47004 2.84994 1.00003 2.32995 0.610016Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.0992431640625 3.119384765625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 332' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.79996 1.60004C1.63997 1.53004 1.33997 1.38004 1.34997 1.17003C1.34997 1.10003 1.39997 1.04003 1.43997 1.01003C1.74997 0.710019 2.41995 0.790021 2.53995 0.300008C2.54995 0.220006 2.54995 0.150004 2.49995 0.100003C2.44995 0.0600016 2.38995 0.0300008 2.31995 0.0200005C1.90996 -0.0500013 1.49997 0.0900024 1.12998 0.250007C0.939982 0.320008 0.739986 0.37001 0.549989 0.440012C0.429992 0.490013 0.319994 0.540014 0.209996 0.610016C-0.309994 1.00003 0.259995 1.47004 0.619988 1.70004C1.01998 1.95005 1.65997 2.38006 2.14996 2.29006C2.21996 2.27006 2.30995 2.24006 2.33995 2.17006C2.51995 1.84005 2.00996 1.68004 1.79996 1.60004Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 304' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.62 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.742919921875 6.6220703125) rotate(0)'%3e%3cg opacity='1' transform='translate(0 3.99365234375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 305' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.83 1.6C2.44 1.45 2.06 1.27 1.7 1.06C1.36 0.870002 1.03 0.640001 0.629999 0.550001C0.38 0.510001 0.0999999 0.600001 0.02 0.870002C-0.03 1.02 0.02 1.19 0.0899999 1.34C0.31 1.74 0.669999 1.97 1.04 2.19C1.15 2.26 1.27 2.33 1.38 2.39C2.43 2.97001 3.58 3.38001 4.76 3.58001C5.37999 3.69001 5.99999 3.75001 6.62999 3.78001C6.63999 3.78001 6.64999 3.78001 6.66999 3.78001C7.10999 3.79001 7.54999 3.78001 7.98999 3.75001C9.15999 3.67001 10.33 3.44001 11.42 2.99001C12.06 2.73001 12.67 2.4 13.23 1.99C13.65 1.68 14.11 1.35 14.37 0.880002C14.48 0.690001 14.62 0.350001 14.46 0.14C14.18 -0.21 13.75 0.17 13.52 0.350001C12.77 0.930002 11.91 1.36 11.02 1.68C8.54999 2.52 5.67999 2.58001 3.2 1.72C3.08 1.68 2.96 1.64 2.83 1.6Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.12066650390625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 306' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.06998 2.85996C3.41998 2.89996 3.81998 2.96996 4.08998 2.73996C4.40998 2.45996 4.29998 1.92997 4.08998 1.55998C3.62998 0.779989 2.50999 0.0199997 1.58999 0C1.25999 -0.00999985 0.309998 0.239996 0.639997 0.69999C0.889996 1.04998 2.00999 1.06998 2.40999 1.20998C2.88999 1.35998 3.37998 1.61998 3.65998 2.03997C3.74998 2.15997 3.78998 2.37997 3.63998 2.40996C3.58998 2.42996 3.55998 2.40996 3.50998 2.39997C2.62999 2.16997 1.69999 2.34997 0.809996 2.51996C0.589997 2.55996 0.369998 2.60996 0.199999 2.73996C0.0299999 2.86996 -0.0599997 3.10995 0.0499998 3.30995C0.0899996 3.39995 0.209999 3.46995 0.339998 3.44995C0.399998 3.43995 0.439998 3.39995 0.489998 3.37995C1.27999 2.93996 2.18999 2.75996 3.06998 2.85996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.787353515625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 307' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.87999 1.20998C2.27999 1.06998 3.39998 1.04998 3.65998 0.69999C3.97998 0.239996 3.02998 -0.00999985 2.69999 0C1.78999 0.0199997 0.659997 0.779989 0.209999 1.55998C-0.00999995 1.92997 -0.119999 2.45996 0.209999 2.73996C0.469998 2.96996 0.869996 2.89996 1.21999 2.85996C2.09999 2.75996 3.01998 2.93996 3.79998 3.37995C3.84998 3.39995 3.89998 3.43995 3.95998 3.44995C4.07998 3.46995 4.19998 3.39995 4.24998 3.30995C4.35998 3.10995 4.25998 2.86996 4.08998 2.73996C3.91998 2.60996 3.69998 2.55996 3.48998 2.51996C2.58999 2.34997 1.66999 2.16997 0.779996 2.39997C0.739996 2.40996 0.699997 2.42996 0.649997 2.40996C0.509997 2.37997 0.539997 2.15997 0.629997 2.03997C0.919995 1.61998 1.39999 1.35998 1.87999 1.20998Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 321' fill-rule='evenodd' style='fill:%239FA0A0' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.5615234375 5.765869140625) rotate(0)'%3e%3cg opacity='1' transform='translate(3.38720703125 6.82763671875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 322' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.05003 1.79002C5.57003 0.740009 4.41002 0 3.06002 0C1.71001 0 0.550003 0.740009 0.0700004 1.79002C-0.170001 2.30003 0.230001 2.90003 0.800004 2.90003L5.33003 2.90003C5.90003 2.90003 6.28003 2.30003 6.05003 1.79002Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 323' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.310002 2.20004C1.48001 2.50005 3.78003 2.11004 3.98003 0.630012C4.01003 0.390008 3.88003 -0.200004 3.53003 0.0700014C3.17002 0.370007 2.92002 0.780015 2.53002 1.07002C2.16002 1.36003 1.72001 1.52003 1.25001 1.50003C0.950007 1.48003 0.610005 1.42003 0.310002 1.51003C0.0600005 1.60003 -0.0600005 1.83004 0.0300002 2.01004C0.0800006 2.10004 0.170001 2.16004 0.310002 2.20004Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.9056396484375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 324' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.67003 1.51003C3.37003 1.42003 3.03002 1.48003 2.73002 1.50003C2.26002 1.52003 1.83001 1.36003 1.45001 1.07002C1.07001 0.780015 0.810006 0.370007 0.450003 0.0700014C0.100001 -0.200004 -0.0300002 0.390008 0.0100001 0.630012C0.190001 2.11004 2.50002 2.50005 3.67003 2.20004C3.82003 2.16004 3.90003 2.10004 3.95003 2.01004C4.05003 1.83004 3.93003 1.60003 3.67003 1.51003Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(1.61376953125 3.5240478515625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 325' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.62001 0.280004C1.18 0.110002 0.720003 -0.0600009 0.260001 0.0200003C0.190001 0.0300005 0.11 0.0600009 0.0600002 0.120002C0 0.180003 -0.01 0.260004 0.01 0.340005C0.140001 0.900014 0.890004 0.810012 1.24 1.14002C1.29001 1.19002 1.33001 1.25002 1.34001 1.33002C1.36001 1.57002 1.02 1.74003 0.840003 1.81003C0.600002 1.90003 0.0200001 2.09003 0.230001 2.45004C0.260001 2.53004 0.360001 2.57004 0.450002 2.58004C1 2.69004 1.72001 2.18003 2.17001 1.90003C2.58001 1.65003 3.22001 1.12002 2.63001 0.690011C2.52001 0.600009 2.39001 0.540008 2.26001 0.490008C2.04001 0.410006 1.81001 0.360006 1.62001 0.280004Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.39453125 3.5240478515625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 326' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.700003 1.90003C1.14 2.18003 1.87001 2.69004 2.42001 2.58004C2.51001 2.57004 2.60001 2.53004 2.64001 2.45004C2.84001 2.09003 2.27001 1.90003 2.02001 1.81003C1.84001 1.74003 1.51001 1.57002 1.53001 1.33002C1.54001 1.25002 1.58001 1.19002 1.63001 1.14002C1.98001 0.810012 2.72001 0.900014 2.86001 0.340005C2.88001 0.260004 2.87001 0.180003 2.81001 0.120002C2.76001 0.0600009 2.68001 0.0300005 2.60001 0.0200003C2.15001 -0.0600009 1.69001 0.110002 1.25 0.280004C1.06 0.360006 0.830003 0.410006 0.610002 0.490008C0.480002 0.540008 0.350001 0.600009 0.240001 0.690011C-0.350001 1.12002 0.290001 1.65003 0.700003 1.90003Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 275' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.652587890625 8.188232421875) rotate(0)'%3e%3cg opacity='1' transform='translate(2.3636474609375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 276' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.649998 1.05C1.07 0.580001 1.73999 0.390001 2.34999 0.530001C2.90999 0.670001 3.13999 1.12 3.57999 1.44C3.63999 1.49 3.69999 1.52 3.77999 1.52C4.25998 1.51 3.59999 0.670001 3.48999 0.580001C3.20999 0.350001 2.86999 0.17 2.52999 0.0600001C1.86999 -0.14 -0.179999 0.14 0.00999996 1.21C0.00999996 1.22 0.00999996 1.24 0.0199999 1.26C0.169999 1.61 0.519998 1.2 0.649998 1.05Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(10.417236328125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 277' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.93999 1.21C4.12998 0.14 2.07999 -0.14 1.41999 0.0600001C1.08 0.17 0.739997 0.350001 0.459998 0.580001C0.349999 0.670001 -0.309999 1.51 0.169999 1.52C0.249999 1.52 0.309999 1.49 0.369999 1.44C0.809997 1.12 1.04 0.670001 1.59999 0.530001C2.20999 0.390001 2.87999 0.580001 3.29999 1.05C3.43999 1.2 3.77999 1.61 3.92999 1.26C3.93999 1.24 3.93999 1.22 3.93999 1.21Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 2.306396484375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 278' fill-rule='evenodd' style='fill:%23EF8FB4' opacity='1' d='M1.24003 0C0.560013 0 0 0.560013 0 1.24003C0 1.93005 0.560013 2.48006 1.24003 2.48006C1.93005 2.48006 2.48006 1.93005 2.48006 1.24003C2.48006 0.560013 1.93005 0 1.24003 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(14.2098388671875 2.306396484375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 279' fill-rule='evenodd' style='fill:%23EF8FB4' opacity='1' d='M1.24003 0C0.560013 0 0 0.560013 0 1.24003C0 1.93005 0.560013 2.48006 1.24003 2.48006C1.93005 2.48006 2.48006 1.93005 2.48006 1.24003C2.48006 0.560013 1.93005 0 1.24003 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.41455078125 5.0106201171875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 280' fill-rule='evenodd' style='fill:%23EF8FB4' opacity='1' d='M1.35997 1.46001C1.36997 1.41001 1.36997 1.36001 1.36997 1.32001C1.36997 1.19001 1.49996 1.12001 1.60996 1.18001C1.72996 1.24001 1.84996 1.29001 1.98995 1.28001C2.09995 1.26001 2.20995 1.22001 2.26995 1.13001C2.43994 0.910008 2.29994 0.650006 2.12995 0.480004C1.94995 0.300003 1.73996 0.140001 1.49996 0.0300003C1.41997 0 1.31997 -0.0100001 1.22997 0.0200002L0.179996 0.370003C0.0299993 0.430004 -0.039999 0.600005 0.0299993 0.760007L0.259994 1.24001C0.339992 1.41001 0.42999 1.59001 0.569986 1.72002C0.719983 1.86002 0.929978 1.92002 1.09997 1.84002C1.24997 1.77002 1.32997 1.61001 1.35997 1.46001Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 170' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.183837890625 6.644287109375) rotate(0)'%3e%3cg opacity='1' transform='translate(0.88134765625 3.25927734375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 171' fill-rule='evenodd' style='fill:white' opacity='1' d='M8.4801 3.49395L9.87011 3.49395L9.87011 2.30396L8.4801 2.30396L8.4801 3.49395Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 172' fill-rule='evenodd' style='fill:white' opacity='1' d='M4.64404 3.49395L6.03405 3.49395L6.03405 2.30396L4.64404 2.30396L4.64404 3.49395Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 173' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.71411 1.77278L4.10412 1.77278L4.10412 0.542725L2.71411 0.542725L2.71411 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 174' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.71411 3.49395L4.10412 3.49395L4.10412 2.30396L2.71411 2.30396L2.71411 3.49395Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 175' fill-rule='evenodd' style='fill:white' opacity='1' d='M2.00485 0.542725C1.27483 0.542725 0.674813 1.07275 0.55481 1.77278L2.18486 1.77278L2.18486 0.542725L2.00485 0.542725Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 176' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.56213 3.49395L7.95214 3.49395L7.95214 2.30396L6.56213 2.30396L6.56213 3.49395Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 177' fill-rule='evenodd' style='fill:white' opacity='1' d='M10.41 0.542725L10.41 1.76268L11.69 1.76268C11.58 1.1227 11.06 0.612722 10.41 0.542725Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 178' fill-rule='evenodd' style='fill:white' opacity='1' d='M8.4801 1.77278L9.87011 1.77278L9.87011 0.542725L8.4801 0.542725L8.4801 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 179' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.56213 1.77278L7.95214 1.77278L7.95214 0.542725L6.56213 0.542725L6.56213 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 180' fill-rule='evenodd' style='fill:white' opacity='1' d='M11.69 2.29187L10.41 2.29187L10.41 3.48187C11.05 3.41187 11.57 2.92187 11.69 2.29187Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 181' fill-rule='evenodd' style='fill:white' opacity='1' d='M4.64404 1.77278L6.03405 1.77278L6.03405 0.542725L4.64404 0.542725L4.64404 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 182' fill-rule='evenodd' style='fill:white' opacity='1' d='M1.99477 3.49395L2.17476 3.49395L2.17476 2.30396L0.55481 2.30396C0.674806 2.98395 1.27479 3.49395 1.99477 3.49395Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 183' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.97 2.26997C11.85 3.04996 11.22 3.65995 10.42 3.73995C10.41 3.86994 10.3 3.97994 10.16 3.97994C10.02 3.97994 9.90001 3.86994 9.89001 3.73995L8.50001 3.73995C8.49001 3.86994 8.37001 3.97994 8.24001 3.97994C8.11001 3.97994 7.99001 3.86994 7.97001 3.73995L6.59001 3.73995C6.57001 3.86994 6.45001 3.97994 6.32001 3.97994C6.19001 3.97994 6.07001 3.86994 6.06001 3.73995L4.67001 3.73995C4.66001 3.86994 4.54001 3.97994 4.40001 3.97994C4.27001 3.97994 4.15 3.86994 4.14 3.73995L2.75 3.73995C2.74 3.86994 2.62 3.97994 2.48 3.97994C2.35 3.97994 2.23 3.86994 2.22 3.73995L2 3.73995C1.13 3.73995 0.42 3.09996 0.29 2.26997L0.27 2.26997C0.12 2.26997 0.01 2.14997 0 2.00997C0 2.01997 0 2.01997 0 2.01997C0.01 3.11996 0.900001 3.99994 2 3.99994L10.24 3.99994C11.35 3.99994 12.24 3.10996 12.24 1.99997L12.24 1.97997C12.24 0.899987 11.34 0 10.24 0L2 0C0.890001 0 0 0.889987 0 1.99997C0 2.00997 0 2.00997 0 2.00997C0.01 1.87997 0.12 1.75997 0.27 1.75997L0.29 1.75997C0.41 0.919987 1.13 0.269996 2 0.269996L2.21 0.269996C2.26 0.179997 2.34 0.109998 2.45 0.109998C2.56 0.109998 2.64 0.169998 2.69 0.269996L4.14 0.269996C4.19 0.179997 4.27001 0.109998 4.38001 0.109998C4.49001 0.109998 4.57001 0.169998 4.62001 0.269996L6.07001 0.269996C6.12001 0.179997 6.20001 0.109998 6.31001 0.109998C6.42001 0.109998 6.50001 0.169998 6.55001 0.269996L8.00001 0.269996C8.05001 0.179997 8.13001 0.109998 8.24001 0.109998C8.35001 0.109998 8.43001 0.169998 8.48001 0.269996L9.93001 0.269996C9.98001 0.179997 10.06 0.109998 10.17 0.109998C10.28 0.109998 10.37 0.169998 10.41 0.269996C11.22 0.339995 11.88 0.969986 11.98 1.75997C12.09 1.79997 12.17 1.88997 12.17 2.00997C12.17 2.13997 12.09 2.23997 11.97 2.26997ZM11.98 1.75997C11.88 0.969986 11.22 0.339995 10.41 0.269996C10.37 0.169998 10.28 0.109998 10.17 0.109998C10.06 0.109998 9.98001 0.179997 9.93001 0.269996L8.48001 0.269996C8.43001 0.169998 8.35001 0.109998 8.24001 0.109998C8.13001 0.109998 8.05001 0.179997 8.00001 0.269996L6.55001 0.269996C6.50001 0.169998 6.42001 0.109998 6.31001 0.109998C6.20001 0.109998 6.12001 0.179997 6.07001 0.269996L4.62001 0.269996C4.57001 0.169998 4.49001 0.109998 4.38001 0.109998C4.27001 0.109998 4.19 0.179997 4.14 0.269996L2.69 0.269996C2.64 0.169998 2.56 0.109998 2.45 0.109998C2.34 0.109998 2.26 0.179997 2.21 0.269996L2 0.269996C1.13 0.269996 0.41 0.919987 0.29 1.75997L0.27 1.75997C0.12 1.75997 0.01 1.87997 0 2.00997C0.01 2.14997 0.12 2.26997 0.27 2.26997L0.29 2.26997C0.42 3.09996 1.13 3.73995 2 3.73995L2.22 3.73995C2.23 3.86994 2.35 3.97994 2.48 3.97994C2.62 3.97994 2.74 3.86994 2.75 3.73995L4.14 3.73995C4.15 3.86994 4.27001 3.97994 4.40001 3.97994C4.54001 3.97994 4.66001 3.86994 4.67001 3.73995L6.06001 3.73995C6.07001 3.86994 6.19001 3.97994 6.32001 3.97994C6.45001 3.97994 6.57001 3.86994 6.59001 3.73995L7.97001 3.73995C7.99001 3.86994 8.11001 3.97994 8.24001 3.97994C8.37001 3.97994 8.49001 3.86994 8.50001 3.73995L9.89001 3.73995C9.90001 3.86994 10.02 3.97994 10.16 3.97994C10.3 3.97994 10.41 3.86994 10.42 3.73995C11.22 3.65995 11.85 3.04996 11.97 2.26997C12.09 2.23997 12.17 2.13997 12.17 2.00997C12.17 1.88997 12.09 1.79997 11.98 1.75997ZM0 1.99997C0 1.99997 0 1.99997 0 1.99997ZM0 1.99997C0 1.99997 0 1.99997 0 1.99997C0 1.99997 0 1.99997 0 1.99997ZM0 2.01997C0 2.01997 0 2.01997 0 2.00997C0 2.00997 0 2.00997 0 1.99997C0 2.00997 0 2.00997 0 2.01997ZM0 2.02997C0 2.01997 0 2.01997 0 2.01997C0 2.00997 0 2.00997 0 1.99997L0 2.02997Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 184' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56213 3.49817L6.56213 3.73917C6.56213 3.75117 6.56213 3.76317 6.56213 3.76317L7.94914 3.76317C7.94914 3.75117 7.94914 3.73917 7.94914 3.73917L7.94914 3.49817L6.56213 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 185' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.00156 3.49393C1.29154 3.49393 0.691524 2.98394 0.571521 2.30396L0.301514 2.30396C0.431517 3.13394 1.14154 3.77393 2.01156 3.77393L2.19156 3.77393C2.19156 3.76393 2.19156 3.75393 2.19156 3.75393L2.19156 3.49393L2.18156 3.49393L2.00156 3.49393Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 186' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71411 3.49817L2.71411 3.73917C2.71411 3.75117 2.71411 3.76317 2.71411 3.76317L4.10112 3.76317C4.10112 3.75117 4.10112 3.73917 4.10112 3.73917L4.10112 3.49817L2.71411 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 187' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64404 3.49817L4.64404 3.73917C4.64404 3.75117 4.64404 3.76317 4.64404 3.76317L6.03105 3.76317C6.03105 3.75117 6.03105 3.73917 6.03105 3.73917L6.03105 3.49817L4.64404 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 188' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86686 0.542358L9.86686 0.386371C9.86686 0.349374 9.87886 0.301378 9.89186 0.265381L8.44385 0.265381C8.45585 0.301378 8.46785 0.337375 8.46785 0.386371L8.46785 0.542358L8.47985 0.542358L9.86686 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 189' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.17943 0.54539L2.17943 0.385385C2.17943 0.345384 2.19943 0.305382 2.20943 0.265381L1.99943 0.265381C1.11943 0.265381 0.409429 0.915403 0.289429 1.76543L0.559429 1.76543C0.67943 1.07541 1.27943 0.54539 1.99943 0.54539L2.17943 0.54539Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 190' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.9489 0.542358L7.9489 0.386371C7.9489 0.349374 7.9609 0.301378 7.9739 0.265381L6.52588 0.265381C6.53788 0.301378 6.54988 0.337375 6.54988 0.386371L6.54988 0.542358L6.56188 0.542358L7.9489 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 191' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03093 0.542358L6.03093 0.386371C6.03093 0.349374 6.04293 0.301378 6.05593 0.265381L4.60791 0.265381C4.61991 0.301378 4.63191 0.337375 4.63191 0.386371L4.63191 0.542358L4.64391 0.542358L6.03093 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 192' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.10087 0.542358L4.10087 0.386371C4.10087 0.349374 4.11287 0.301378 4.12587 0.265381L2.67786 0.265381C2.68986 0.301378 2.70186 0.337375 2.70186 0.386371L2.70186 0.542358L2.71386 0.542358L4.10087 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 193' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.4801 3.49817L8.4801 3.73917C8.4801 3.75117 8.4801 3.76317 8.4801 3.76317L9.86711 3.76317C9.86711 3.75117 9.86711 3.73917 9.86711 3.73917L9.86711 3.49817L8.4801 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 194' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.6881 1.75739L11.8981 1.75739C11.9181 1.75739 11.9381 1.75739 11.9681 1.77739C11.8581 0.977367 11.2081 0.337346 10.3981 0.277344C10.4081 0.317345 10.4181 0.347346 10.4181 0.387347L10.4181 0.547353L10.4081 0.547353C11.0581 0.617355 11.5781 1.11737 11.6881 1.75739Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 195' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.3981 3.49393L10.3981 3.75393C10.3981 3.76393 10.3981 3.76393 10.3981 3.77393C11.1981 3.70393 11.838 3.08394 11.938 2.30396C11.918 2.30396 11.898 2.31395 11.878 2.31395L11.678 2.31395L11.678 2.30396C11.558 2.93394 11.0481 3.41393 10.3981 3.49393Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 196' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64404 2.29149L6.03105 2.29149L6.03105 2.02649L4.64404 2.02649L4.64404 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 197' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71411 2.29149L4.10112 2.29149L4.10112 2.02649L2.71411 2.02649L2.71411 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 198' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.7131 2.02611L11.7131 2.00211C11.7131 1.91811 11.7011 1.84511 11.6891 1.76111L10.41 1.76111L10.41 2.02611L11.7131 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 199' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56213 2.29149L7.94914 2.29149L7.94914 2.02649L6.56213 2.02649L6.56213 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 200' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.4801 2.02611L9.86711 2.02611L9.86711 1.76111L8.4801 1.76111L8.4801 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 201' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.7131 2.03857ZM11.7131 2.03857L10.41 2.03857L10.41 2.30357L11.6891 2.30357C11.7011 2.21957 11.7131 2.12257 11.7131 2.03857Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 202' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56213 2.02611L7.94914 2.02611L7.94914 1.76111L6.56213 1.76111L6.56213 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 203' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.64404 2.02611L6.03105 2.02611L6.03105 1.76111L4.64404 1.76111L4.64404 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 204' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.4801 2.29149L9.86711 2.29149L9.86711 2.02649L8.4801 2.02649L8.4801 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 205' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.530762 2.03857ZM2.18377 2.03857L0.530762 2.03857C0.530762 2.12257 0.542762 2.20757 0.554762 2.30357L2.18377 2.30357L2.18377 2.03857Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 206' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71411 2.02611L4.10112 2.02611L4.10112 1.76111L2.71411 1.76111L2.71411 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 207' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.554762 1.76111C0.542762 1.84511 0.530762 1.91811 0.530762 2.00211L0.530762 2.02611L2.18377 2.02611L2.18377 1.76111L0.554762 1.76111Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 208' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.289955 2.30419C0.276957 2.21919 0.264958 2.12319 0.264958 2.03819L0.264958 2.01419C0.264958 1.93019 0.276957 1.85719 0.289955 1.77319L0.264958 1.77319C0.120981 1.77319 0 1.89419 0 2.03819C0 2.18319 0.120981 2.30419 0.264958 2.30419L0.289955 2.30419Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 209' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.9541 2.28024C12.0751 2.25523 12.1591 2.14722 12.1591 2.02621C12.1591 1.9062 12.0751 1.7972 11.9661 1.77319C11.9781 1.8452 11.9781 1.93021 11.9781 2.00221L11.9781 2.02621C11.9781 2.11122 11.9661 2.19523 11.9541 2.28024Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 210' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.265381 2.02649C0.265381 2.12349 0.277379 2.20749 0.289377 2.29149L0.555335 2.29149C0.542337 2.20749 0.530339 2.12349 0.530339 2.02649L0.265381 2.02649Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 211' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.530339 2.02611L0.530339 2.00211C0.530339 1.91811 0.542337 1.84511 0.555335 1.76111L0.289377 1.76111C0.277379 1.84511 0.265381 1.91811 0.265381 2.00211L0.265381 2.02611L0.530339 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 212' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M11.7127 2.02611ZM11.8937 1.76111L11.6887 1.76111C11.7007 1.84511 11.7127 1.91811 11.7127 2.00211L11.7127 2.02611C11.7127 2.12311 11.7007 2.20711 11.6887 2.29211L11.8937 2.29211C11.9177 2.29211 11.9417 2.29211 11.9537 2.28011C11.9657 2.19511 11.9787 2.11111 11.9787 2.02611L11.9787 2.00211C11.9787 1.91811 11.9657 1.84511 11.9657 1.77311C11.9417 1.76111 11.9177 1.76111 11.8937 1.76111Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 213' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.44873 3.49795L2.71373 3.49795L2.71373 2.30396L2.44873 2.30396L2.44873 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 214' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 3.49795L2.44835 3.49795L2.44835 2.30396L2.18335 2.30396L2.18335 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 215' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 1.77278L2.44835 1.77278L2.44835 0.542725L2.18335 0.542725L2.18335 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 216' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.44873 1.77278L2.71373 1.77278L2.71373 0.542725L2.44873 0.542725L2.44873 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 217' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.2074 0.277561L2.69036 0.277561C2.64137 0.180588 2.55737 0.120605 2.44838 0.120605C2.34039 0.120605 2.25539 0.180588 2.2074 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 218' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71435 3.76355L2.18335 3.76355C2.19535 3.89657 2.31635 4.00459 2.44835 4.00459C2.58135 4.00459 2.70235 3.89657 2.71435 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 219' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.71435 3.49817L2.44835 3.49817L2.18335 3.49817L2.18335 3.73917C2.18335 3.75117 2.18335 3.76317 2.18335 3.76317L2.71435 3.76317C2.71435 3.75117 2.71435 3.73917 2.71435 3.73917L2.71435 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 220' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 0.386371L2.18335 0.542358L2.44835 0.542358L2.71435 0.542358L2.71435 0.386371C2.71435 0.349374 2.70235 0.301378 2.69035 0.265381L2.20735 0.265381C2.19535 0.301378 2.18335 0.337375 2.18335 0.386371Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 221' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.44873 2.02611L2.71373 2.02611L2.71373 1.76111L2.44873 1.76111L2.44873 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 222' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 2.29149L2.44835 2.29149L2.44835 2.02649L2.18335 2.02649L2.18335 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 223' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.44873 2.29149L2.71373 2.29149L2.71373 2.02649L2.44873 2.02649L2.44873 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 224' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.18335 2.02611L2.44835 2.02611L2.44835 1.76111L2.18335 1.76111L2.18335 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 225' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.10132 1.77278L4.36632 1.77278L4.36632 0.542725L4.10132 0.542725L4.10132 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 226' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.3667 1.77278L4.6317 1.77278L4.6317 0.542725L4.3667 0.542725L4.3667 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 227' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.10132 3.49795L4.36632 3.49795L4.36632 2.30396L4.10132 2.30396L4.10132 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 228' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.3667 3.49795L4.6317 3.49795L4.6317 2.30396L4.3667 2.30396L4.3667 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 229' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.63232 3.76355L4.10132 3.76355C4.12532 3.89657 4.23432 4.00459 4.36632 4.00459C4.49932 4.00459 4.62032 3.89657 4.63232 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 230' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.12537 0.277561L4.60833 0.277561C4.57133 0.180588 4.47534 0.120605 4.36635 0.120605C4.25836 0.120605 4.17336 0.180588 4.12537 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 231' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.1134 3.76317L4.6444 3.76317C4.6444 3.75117 4.6444 3.73917 4.6444 3.73917L4.6444 3.49817L4.3784 3.49817L4.1134 3.49817L4.1134 3.73917C4.1134 3.75117 4.1134 3.76317 4.1134 3.76317Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 232' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.36632 0.542358L4.63232 0.542358L4.63232 0.386371C4.63232 0.349374 4.62032 0.301378 4.60832 0.265381L4.12532 0.265381C4.11332 0.301378 4.10132 0.337375 4.10132 0.386371L4.10132 0.542358L4.36632 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 233' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.10132 2.02611L4.36632 2.02611L4.36632 1.76111L4.10132 1.76111L4.10132 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 234' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.3667 2.29149L4.6317 2.29149L4.6317 2.02649L4.3667 2.02649L4.3667 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 235' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.10132 2.29149L4.36632 2.29149L4.36632 2.02649L4.10132 2.02649L4.10132 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 236' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.3667 2.02611L4.6317 2.02611L4.6317 1.76111L4.3667 1.76111L4.3667 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 237' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03125 1.77278L6.29625 1.77278L6.29625 0.542725L6.03125 0.542725L6.03125 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 238' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03125 3.49795L6.29625 3.49795L6.29625 2.30396L6.03125 2.30396L6.03125 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 239' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29663 3.49795L6.56163 3.49795L6.56163 2.30396L6.29663 2.30396L6.29663 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 240' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29663 1.77278L6.56163 1.77278L6.56163 0.542725L6.29663 0.542725L6.29663 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 241' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56225 3.76355L6.03125 3.76355C6.04325 3.89657 6.15225 4.00459 6.29625 4.00459C6.42925 4.00459 6.55025 3.89657 6.56225 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 242' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.05542 0.277561L6.53838 0.277561C6.48939 0.180588 6.40539 0.120605 6.2964 0.120605C6.18841 0.120605 6.10342 0.180588 6.05542 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 243' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.56225 0.542358L6.56225 0.386371C6.56225 0.349374 6.55025 0.301378 6.53825 0.265381L6.05525 0.265381C6.04325 0.301378 6.03125 0.337375 6.03125 0.386371L6.03125 0.542358L6.29625 0.542358L6.56225 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 244' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03125 3.49817L6.03125 3.73917C6.03125 3.75117 6.03125 3.76317 6.03125 3.76317L6.56225 3.76317C6.56225 3.75117 6.56225 3.73917 6.56225 3.73917L6.56225 3.49817L6.29625 3.49817L6.03125 3.49817Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 245' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03125 2.02611L6.29625 2.02611L6.29625 1.76111L6.03125 1.76111L6.03125 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 246' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29663 2.02611L6.56163 2.02611L6.56163 1.76111L6.29663 1.76111L6.29663 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 247' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.03125 2.29149L6.29625 2.29149L6.29625 2.02649L6.03125 2.02649L6.03125 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 248' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.29663 2.29149L6.56163 2.29149L6.56163 2.02649L6.29663 2.02649L6.29663 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 249' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94934 3.49795L8.21434 3.49795L8.21434 2.30396L7.94934 2.30396L7.94934 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 250' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.21472 1.77278L8.47972 1.77278L8.47972 0.542725L8.21472 0.542725L8.21472 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 251' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94934 1.77278L8.21434 1.77278L8.21434 0.542725L7.94934 0.542725L7.94934 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 252' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.21472 3.49795L8.47972 3.49795L8.47972 2.30396L8.21472 2.30396L8.21472 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 253' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.48034 3.76355L7.94934 3.76355C7.96134 3.89657 8.08234 4.00459 8.21434 4.00459C8.34734 4.00459 8.46834 3.89657 8.48034 3.76355Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 254' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.97339 0.277561L8.45635 0.277561C8.40736 0.180588 8.32336 0.120605 8.21437 0.120605C8.10638 0.120605 8.02139 0.180588 7.97339 0.277561Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 255' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.48034 0.542358L8.48034 0.386371C8.48034 0.349374 8.46834 0.301378 8.45634 0.265381L7.97334 0.265381C7.96134 0.301378 7.94934 0.337375 7.94934 0.386371L7.94934 0.542358L8.21434 0.542358L8.48034 0.542358Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 256' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.48034 3.76317C8.48034 3.75117 8.48034 3.73917 8.48034 3.73917L8.48034 3.49817L8.21434 3.49817L7.94934 3.49817L7.94934 3.73917C7.94934 3.75117 7.94934 3.76317 7.94934 3.76317L8.48034 3.76317Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 257' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.21472 2.29149L8.47972 2.29149L8.47972 2.02649L8.21472 2.02649L8.21472 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 258' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94934 2.02611L8.21434 2.02611L8.21434 1.76111L7.94934 1.76111L7.94934 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 259' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M8.21472 2.02611L8.47972 2.02611L8.47972 1.76111L8.21472 1.76111L8.21472 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 260' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.94934 2.29149L8.21434 2.29149L8.21434 2.02649L7.94934 2.02649L7.94934 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 261' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.4097 0.54264C10.3497 0.53064 10.3017 0.53064 10.2417 0.53064L10.1447 0.53064L10.1447 1.76069L10.4097 1.76069L10.4097 0.54264Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 262' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86731 3.49795L10.1323 3.49795L10.1323 2.30396L9.86731 2.30396L9.86731 3.49795Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 263' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86731 1.77278L10.1323 1.77278L10.1323 0.542725L9.86731 0.542725L9.86731 1.77278Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 264' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 3.49784L10.2417 3.49784C10.3017 3.49784 10.3497 3.49784 10.4097 3.48584L10.4097 2.29187L10.1447 2.29187L10.1447 2.30387L10.1447 3.49784Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 265' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1444 0.120605C10.0364 0.120605 9.95144 0.180588 9.90344 0.277561L10.2414 0.277561C10.2894 0.265564 10.3374 0.277561 10.3864 0.277561C10.3494 0.180588 10.2534 0.120605 10.1444 0.120605Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 266' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87939 3.77555L9.88039 3.77555C9.88039 3.77155 9.87939 3.76755 9.87939 3.76355L9.87939 3.77555ZM10.1444 4.00459C10.2894 4.00459 10.3984 3.89657 10.4104 3.76355C10.3494 3.76355 10.3014 3.77555 10.2414 3.77555L9.88039 3.77555C9.89839 3.90258 10.0164 4.00459 10.1444 4.00459Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 267' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86731 0.386362L9.86731 0.542337L10.1323 0.542337L10.2293 0.542337C10.2893 0.542337 10.3373 0.542337 10.3983 0.555335L10.3983 0.386362C10.3983 0.349368 10.3863 0.313373 10.3743 0.277379C10.3253 0.277379 10.2773 0.265381 10.2293 0.265381L9.89131 0.265381C9.87931 0.301375 9.86731 0.33737 9.86731 0.386362Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 268' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.87939 3.76306L10.2414 3.76306C10.3014 3.76306 10.3494 3.76306 10.4104 3.75106C10.4104 3.73906 10.4104 3.73906 10.4104 3.72706L10.4104 3.48608C10.3494 3.49808 10.3014 3.49808 10.2414 3.49808L10.1444 3.49808L9.87939 3.49808L9.87939 3.73906C9.87939 3.75106 9.87939 3.76306 9.87939 3.76306Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 269' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86731 2.29149L10.1323 2.29149L10.1323 2.02649L9.86731 2.02649L9.86731 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 270' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 2.29149L10.4097 2.29149L10.4097 2.02649L10.1447 2.02649L10.1447 2.29149Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 271' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M9.86731 2.02611L10.1323 2.02611L10.1323 1.76111L9.86731 1.76111L9.86731 2.02611Z'%3e%3c/path%3e%3cpath id='%e8%b7%af%e5%be%84 272' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M10.1447 2.02611L10.4097 2.02611L10.4097 1.76111L10.1447 1.76111L10.1447 2.02611Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 273' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.649998 1.05C1.07 0.580001 1.73999 0.390001 2.34999 0.530001C2.90999 0.670001 3.13999 1.12 3.57999 1.44C3.63999 1.49 3.69999 1.52 3.77999 1.52C4.25998 1.51 3.59999 0.670001 3.48999 0.580001C3.20999 0.350001 2.86999 0.17 2.52999 0.0600001C1.86999 -0.14 -0.179999 0.14 0.00999996 1.21C0.00999996 1.22 0.00999996 1.24 0.0199999 1.26C0.169999 1.62 0.519998 1.2 0.649998 1.05Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.6700439453125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 274' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.93999 1.21C4.12998 0.14 2.07999 -0.14 1.41999 0.0600001C1.08 0.17 0.739997 0.350001 0.459998 0.580001C0.349999 0.670001 -0.309999 1.51 0.169999 1.52C0.249999 1.52 0.309999 1.49 0.369999 1.44C0.809997 1.12 1.04 0.670001 1.59999 0.530001C2.20999 0.390001 2.87999 0.580001 3.29999 1.05C3.43999 1.2 3.77999 1.62 3.92999 1.26C3.93999 1.24 3.93999 1.22 3.93999 1.21Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 347' fill-rule='evenodd' style='fill:%239FA0A0' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.4095458984375 5.208740234375) rotate(0)'%3e%3cg opacity='1' transform='translate(0.8201904296875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 348' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.27 1.93999C1.32 2.21998 3.36999 1.86999 3.53999 0.559996C3.55999 0.339998 3.44999 -0.179999 3.13999 0.0599996C2.80999 0.329998 2.59 0.689995 2.26 0.939994C1.93 1.19999 1.55 1.33999 1.13 1.31999C0.849998 1.30999 0.559999 1.23999 0.289999 1.32999C0.0499999 1.40999 -0.0599999 1.61999 0.0299999 1.77999C0.0599999 1.84999 0.15 1.90999 0.27 1.93999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(8.7464599609375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 349' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.24999 1.32999C2.97999 1.23999 2.69 1.30999 2.42 1.31999C1.99 1.33999 1.61 1.19999 1.28 0.939994C0.959998 0.689995 0.729999 0.329998 0.399999 0.0599996C0.0899998 -0.179999 -0.02 0.339998 0 0.559996C0.17 1.86999 2.22 2.21998 3.26999 1.93999C3.38999 1.90999 3.47999 1.84999 3.50999 1.77999C3.59999 1.61999 3.48999 1.40999 3.24999 1.32999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.7664794921875 3.3470458984375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 350' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.0700001 1.05003C-0.33 1.85005 1.06 1.15003 1.33 1.09003C1.95 0.950024 2.57 1.40004 3.2 1.34003C3.29 1.32003 3.39 1.30003 3.45 1.23003C3.53 1.12003 3.5 0.960025 3.42 0.840022C3.27 0.590015 2.99 0.430011 2.74 0.270007C2.54 0.170004 2.34 0.040001 2.11 0.0100003C1.52 -0.0800021 0.37 0.470012 0.0700001 1.05003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.8443603515625 3.3470458984375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 351' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.760001 0.270007C0.510001 0.430011 0.23 0.590015 0.0700001 0.840022C0 0.960025 -0.04 1.12003 0.0500001 1.23003C0.11 1.30003 0.21 1.32003 0.3 1.34003C0.930001 1.40004 1.54 0.950024 2.17 1.09003C2.44 1.15003 3.82 1.85005 3.43 1.05003C3.12 0.470012 1.98 -0.0800021 1.39 0.0100003C1.16 0.040001 0.950001 0.170004 0.760001 0.270007Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.4517822265625 5.89013671875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 352' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.08994 3.75003C6.35994 3.23003 6.07994 2.59002 5.75995 2.10002C5.44995 1.63002 5.09995 1.18001 4.72996 0.760007C4.35996 0.350003 3.88996 -0.0700006 3.29997 0.0100001C2.77997 0.0800007 2.34998 0.480004 1.93998 0.770007C1.04999 1.42001 -0.0599994 2.31002 0 3.55003C0.00999991 3.58003 0.00999991 3.63003 0.0299997 3.67003C0.0599994 3.99004 0.269997 4.27004 0.569995 4.40004C0.869992 4.53004 1.21999 4.52004 1.51999 4.41004C1.68998 4.35004 1.84998 4.24004 2.01998 4.17004C2.18998 4.11004 2.34998 4.06004 2.53998 4.04004C2.89997 3.99004 3.25997 4.04004 3.59997 4.12004C4.03996 4.23004 4.48996 4.38004 4.94995 4.37004C5.38995 4.35004 5.88994 4.16004 6.08994 3.75003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.4447021484375 5.0740966796875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 353' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.840001 2.21003C1.06 2.37003 1.36 2.33003 1.54 2.14002C1.82 1.85002 1.71 1.39002 1.58 1.06001C1.42 0.660007 1.13 0.250003 0.730001 0.0800009C0.54 -0.0100001 0.32 -0.0300003 0.1 0.0400005C-0.0800001 0.100001 0.02 0.270003 0.0900001 0.380004C0.21 0.570006 0.3 0.790009 0.36 1.01001C0.39 1.15001 0.42 1.30001 0.43 1.43002C0.48 1.71002 0.600001 2.03002 0.840001 2.21003Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 5.0740966796875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 354' fill-rule='evenodd' style='fill:white' opacity='1' d='M1.36 1.01001C1.42 0.790009 1.5 0.570006 1.62 0.380004C1.69 0.270003 1.79 0.100001 1.61 0.0400005C1.39 -0.0300003 1.17 -0.0100001 0.980001 0.0800009C0.58 0.250003 0.29 0.660007 0.14 1.06001C0 1.39002 -0.1 1.85002 0.17 2.14002C0.35 2.33003 0.660001 2.37003 0.870001 2.21003C1.11 2.03002 1.23 1.71002 1.28 1.43002C1.31 1.30001 1.33 1.15001 1.36 1.01001Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 333' fill-rule='evenodd' style='fill:%23A6D9E4' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.61 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 6.0142822265625) rotate(0)'%3e%3cg opacity='1' transform='translate(3.2293701171875 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 334' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.05001 1.32005C2.56001 1.31004 3.09001 1.26004 3.50002 0.960033C3.73002 0.790027 3.91002 0.520018 3.90002 0.250009C3.90002 0.210007 3.89002 0.170006 3.86002 0.140005C3.82002 0.0800027 3.72002 0.0900031 3.65002 0.100003C2.87001 0.260009 2.08001 0.510017 1.28001 0.330011C0.990005 0.270009 0.780004 0.0900031 0.510002 0.0200007C0.220001 -0.0700024 -0.0300001 0.170006 0 0.480016C0.0300001 0.700024 0.210001 0.900031 0.400002 1.02003C0.880004 1.32005 1.49001 1.34005 2.05001 1.32005Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.689208984375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 335' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.39002 0.0200007C3.12002 0.0900031 2.91001 0.270009 2.62001 0.330011C1.83001 0.510017 1.04001 0.260009 0.250001 0.100003C0.180001 0.0900031 0.0900004 0.0800027 0.0400002 0.140005C0.01 0.170006 0 0.210007 0 0.250009C-0.01 0.520018 0.170001 0.790027 0.400002 0.960033C0.810004 1.26004 1.34001 1.31004 1.85001 1.32005C2.41001 1.34005 3.02001 1.32005 3.50002 1.02003C3.69002 0.900031 3.87002 0.700024 3.90002 0.480016C3.93002 0.170006 3.68002 -0.0700024 3.39002 0.0200007Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(0 1.19921875) rotate(0)'%3e%3cg opacity='1' transform='translate(5.4403076171875 3.160400390625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 336' fill-rule='evenodd' style='fill:white' opacity='1' d='M9.18005 3.66L9.18005 1.85C9.18005 0.819999 8.35004 0 7.33004 0L1.85001 0C0.820004 0 0 0.829999 0 1.85L0 3.66C0 4.67999 0.830004 5.49999 1.85001 5.49999L7.33004 5.49999C8.36004 5.49999 9.18005 4.67999 9.18005 3.66Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 337' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.530005 1.04L6.26006 4.96999L6.21006 4.26C6.04005 4.21 0.900008 0.629999 0.0100001 0L0.0100001 0.639999L0 0.639999C0.0200002 0.689999 0.480004 1.01 0.530005 1.04Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 2.2196044921875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 338' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.24996 4.91996L6.19996 4.20997C6.02996 4.15997 0.889994 0.629995 0 0L0 0.659995L6.24996 4.91996Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(13.7998046875 0.5428466796875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 339' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.21002 0C5.31002 0.630003 0.220001 3.67002 0.0500002 3.72002L0 4.43002L6.21002 0.490002L6.21002 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(13.7998046875 2.7261962890625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 340' fill-rule='evenodd' style='fill:white' opacity='1' d='M6.21002 0C5.31002 0.630003 0.220001 3.67002 0.0500002 3.72002L0 4.43002L6.21002 0.490002L6.21002 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 341' fill-rule='evenodd' style='fill:%239FA0A0' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.62 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0.947021484375 4.82421875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 1.0623779296875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 342' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.0399999 11.1C0.00999997 11.19 -0.0199999 11.3 0.0199999 11.4C0.0699998 11.56 0.249999 11.62 0.399999 11.66C1.37 11.93 2.34999 12.12 3.33999 12.26C4.06999 12.35 4.46998 12.14 4.59998 11.41C4.77998 10.36 4.71998 9.2 4.78998 8.13C4.88998 6.78 5.00998 5.42 5.15998 4.07C5.27998 2.98 5.69998 1.58 5.33998 0.52C5.23998 0.24 4.99998 0 4.69998 0C4.40998 0 4.16999 0.24 4.02999 0.49C3.18999 2.15 2.53999 3.97 1.87999 5.69C1.2 7.47 0.599998 9.28 0.0399999 11.1Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.4207763671875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 343' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.74 1.15998C2.99 0.999983 3.27 0.849986 3.42 0.58999C3.5 0.469992 3.53 0.309995 3.45 0.209996C3.39 0.129998 3.29 0.109998 3.2 0.0999983C2.57 0.0399993 1.95 0.479992 1.33 0.339994C1.06 0.279995 -0.33 -0.419993 0.0700001 0.389993C0.36 0.969984 1.52 1.50997 2.11 1.41998C2.34 1.38998 2.54 1.26998 2.74 1.15998Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(12.5623779296875 0.917724609375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 344' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.760004 0C0.470002 0 0.230001 0.249999 0.130001 0.529999C-0.220001 1.6 0.220001 2.98999 0.340002 4.07999C0.500003 5.42999 0.620003 6.78998 0.720004 8.13998C0.810004 9.21998 0.750004 10.37 0.940005 11.42C1.07001 12.16 1.47001 12.38 2.21001 12.27C3.20002 12.12 4.17002 11.92 5.14003 11.65C5.30003 11.6 5.48003 11.54 5.53003 11.39C5.56003 11.29 5.54003 11.18 5.50003 11.09C4.93003 9.27998 4.33002 7.46998 3.64002 5.68999C2.98002 3.96999 2.30001 2.15 1.44001 0.489999C1.29001 0.239999 1.05001 0 0.760004 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.0306396484375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 345' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.43 0.389993C3.82 -0.419993 2.44 0.279995 2.17 0.339994C1.54 0.479992 0.930001 0.0399993 0.3 0.0999983C0.21 0.109998 0.11 0.129998 0.0500001 0.209996C-0.04 0.309995 0 0.469992 0.0700001 0.58999C0.23 0.849986 0.510001 0.999983 0.760001 1.15998C0.950001 1.26998 1.16 1.38998 1.39 1.41998C1.98 1.50997 3.12 0.969984 3.43 0.389993Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(5.85400390625 5.9007568359375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 346' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.73 0.759997C4.36 0.349998 3.89 -0.0699997 3.3 0.00999996C2.78 0.0799996 2.35 0.479998 1.94 0.769997C1.05 1.41999 -0.06 2.30999 0 3.54998C0 3.58998 0.01 3.63998 0.03 3.66998C0.06 3.98998 0.27 4.26998 0.57 4.39998C0.87 4.52998 1.22 4.51998 1.52 4.40998C1.69 4.34998 1.85 4.23998 2.02 4.16998C2.19 4.10998 2.35 4.05998 2.54 4.03998C2.9 3.98998 3.26 4.03998 3.6 4.11998C4.04 4.22998 4.5 4.37998 4.95 4.36998C5.39 4.34998 5.89 4.15998 6.09 3.74998C6.36 3.22999 6.08 2.58999 5.76 2.09999C5.45 1.62999 5.1 1.17999 4.73 0.759997Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 317' fill-rule='evenodd' style='fill:%23FADA4B' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.704345703125 5.693115234375) rotate(0)'%3e%3cg opacity='1' transform='translate(3.1280517578125 5.2236328125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 318' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.660003 0C0.220001 0 -0.0800004 0.409997 0.0200001 0.819995C0.440002 2.51998 2.13001 3.78998 4.17002 3.78998C6.21003 3.78998 7.89004 2.51998 8.32004 0.819995C8.41004 0.399998 8.10004 0 7.68004 0L0.660003 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 319' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M2.41002 1.21C2.89003 1.36 3.38003 1.62 3.66003 2.04001C3.75003 2.16001 3.79004 2.38001 3.64003 2.41001C3.59003 2.43001 3.56003 2.41001 3.51003 2.40001C2.63002 2.17001 1.70002 2.35001 0.810008 2.52001C0.590005 2.56001 0.370003 2.61001 0.200002 2.74001C0.0300003 2.87001 -0.0600006 3.11001 0.0500005 3.31001C0.0900008 3.40001 0.210002 3.47001 0.340003 3.45001C0.400004 3.44001 0.440004 3.40001 0.490005 3.38001C1.28001 2.94001 2.19002 2.76001 3.07003 2.86001C3.42003 2.90001 3.82004 2.97001 4.09004 2.74001C4.41004 2.46001 4.30004 1.93001 4.09004 1.56C3.63003 0.770002 2.51002 0.0200001 1.59001 0C1.26001 -0.01 0.310003 0.240001 0.640006 0.700002C0.890008 1.05 2.01002 1.07 2.41002 1.21Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(10.298828125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 320' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.22001 2.86001C2.10002 2.76001 3.02003 2.94001 3.80004 3.38001C3.85004 3.40001 3.90004 3.44001 3.96004 3.45001C4.08004 3.47001 4.20004 3.40001 4.25004 3.31001C4.36004 3.11001 4.26004 2.87001 4.09004 2.74001C3.92004 2.61001 3.70003 2.56001 3.49003 2.52001C2.59002 2.35001 1.67002 2.17001 0.780007 2.40001C0.740007 2.41001 0.700006 2.43001 0.650006 2.41001C0.510005 2.38001 0.540005 2.16001 0.630006 2.04001C0.920009 1.62 1.40001 1.36 1.88002 1.21C2.28002 1.07 3.40003 1.05 3.66003 0.700002C3.98004 0.240001 3.03003 -0.01 2.70003 0C1.80002 0.0200001 0.660006 0.770002 0.210002 1.56C-0.0100001 1.93001 -0.120001 2.46001 0.210002 2.74001C0.470004 2.97001 0.870008 2.90001 1.22001 2.86001Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 389' fill-rule='evenodd' style='fill:%2389B23C' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.7359619140625 6.8558349609375) rotate(0)'%3e%3cg opacity='1' transform='translate(2.95654296875 4.1453857421875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 390' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M6.49002 2.55C6.29002 1.11 4.91001 0 3.25001 0C1.58 0 0.210001 1.11 0 2.55C-0.0200001 2.71 0.15 2.86 0.300001 2.8L1.87001 2.22C2.75001 1.89 3.71001 1.89 4.59001 2.22L6.19002 2.8C6.36002 2.86 6.52002 2.73 6.49002 2.55Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 391' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.390004 0.529992C0.220002 0.599991 -0.0300003 0.759988 0 0.939986C0.0400004 1.08998 0.180002 1.17998 0.370004 1.10998C1.05001 0.839987 1.76002 0.919986 2.48002 1.05998C2.98003 1.14998 3.53004 1.29998 4.04004 1.20998C5.02005 1.05998 4.84005 0.209997 3.96004 0.0699989C3.86004 0.0599991 3.77004 0.0399994 3.66004 0.0299995C2.57003 -0.0799988 1.33001 0.0899986 0.390004 0.529992Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.816650390625 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 392' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.390004 0.529992C0.220002 0.599991 -0.0300003 0.759988 0 0.939986C0.0400004 1.08998 0.180002 1.17998 0.370004 1.10998C1.05001 0.839987 1.76002 0.919986 2.48002 1.05998C2.98003 1.14998 3.53004 1.29998 4.04004 1.20998C5.02005 1.05998 4.84005 0.209997 3.96004 0.0699989C3.86004 0.0599991 3.77004 0.0399994 3.66004 0.0299995C2.57003 -0.0799988 1.33001 0.0899986 0.390004 0.529992Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.2603759765625 0.7315673828125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 393' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.57997 1.16C0.899954 1.16 1.15994 0.890001 1.15994 0.580001C1.15994 0.25 0.889954 0 0.57997 0C0.249987 0 0 0.27 0 0.580001C0 0.890001 0.249987 1.15 0.57997 1.16Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.173583984375 0.7315673828125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 394' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.57997 1.16C0.899954 1.16 1.15994 0.890001 1.15994 0.580001C1.15994 0.25 0.889954 0 0.57997 0C0.249987 0 0 0.27 0 0.580001C0 0.890001 0.269986 1.15 0.57997 1.16Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 401' fill-rule='evenodd' style='fill:%23A6D9E4' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.7322998046875 6.287353515625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 402' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486625 2.2985 1.09004 2.44098C1.69346 2.58347 2.29499 2.21175 2.43747 1.60834C2.57995 1.00493 2.20823 0.403399 1.60482 0.260915C1.0014 0.118432 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.4407958984375 0.2763671875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 403' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.53001 1.32999C1.54001 1.24999 1.58001 1.18999 1.63001 1.13999C1.98001 0.809994 2.72001 0.899993 2.86001 0.339997C2.88001 0.259998 2.87001 0.179999 2.81001 0.119999C2.76001 0.0599995 2.68001 0.0299998 2.60001 0.0199998C2.15001 -0.0599995 1.69001 0.109999 1.25 0.279998C1.06 0.359997 0.830003 0.409997 0.610002 0.489996C0.480002 0.539996 0.350001 0.599995 0.240001 0.689994C-0.350001 1.11999 0.290001 1.64999 0.700003 1.89998C1.14 2.17998 1.87001 2.68998 2.42001 2.57998C2.51001 2.56998 2.60001 2.52998 2.64001 2.44998C2.84001 2.08998 2.27001 1.89998 2.02001 1.80999C1.84001 1.73999 1.51001 1.56999 1.53001 1.32999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.2496337890625 5.085205078125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 404' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.77003 1.14C4.68003 1.39 4.55003 1.62 4.39003 1.78C4.07003 2.1 3.62002 2.15 3.30002 1.76C3.21002 1.66 3.13002 1.53 3.03002 1.45C2.79002 1.25 2.56002 1.43 2.43002 1.75C2.31002 2.05 2.27002 2.34 2.09001 2.57C1.93001 2.76 1.73001 2.86 1.51001 2.86C1.07001 2.86 0.690005 2.45 0.350002 2.09C0.310002 2.04 0.260002 1.98 0.200001 1.96C0.140001 1.93 0.0600004 1.96 0.0300002 2.03C-0.0300002 2.14 0.0200001 2.29 0.0800005 2.4C0.350002 2.93 0.800005 3.27 1.27001 3.38C1.27001 3.39 1.28001 3.39 1.28001 3.39C1.58001 3.45 1.90001 3.43 2.16001 3.24C2.36002 3.09 2.52002 2.87 2.66002 2.63C2.80002 2.38 2.87002 2.16 3.13002 2.21C3.38002 2.26 3.60002 2.45 3.84003 2.54C4.29003 2.7 4.73003 2.33 4.95003 1.79C5.07003 1.49 5.17003 1.12 5.18003 0.79C5.18003 0.67 5.06003 -0.19 4.88003 0.04C4.85003 0.06 4.85003 0.1 4.85003 0.14C4.82003 0.47 4.86003 0.81 4.77003 1.14Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 395' fill-rule='evenodd' style='fill:%23EF7C00' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.0340576171875 4.087646484375) rotate(0)'%3e%3cg opacity='1' transform='translate(3.298828125 9.422607421875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 396' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.30995 0.374013C7.30995 0.169006 7.14095 0 6.93596 0L0.373998 0C0.168999 0 0 0.169006 0 0.374013C0 0.57902 0.168999 0.748025 0.373998 0.748025L6.93596 0.748025C7.14095 0.748025 7.30995 0.57902 7.30995 0.374013Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.666259765625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 397' fill-rule='evenodd' style='fill:white' opacity='1' d='M0.402095 2.47579C0.179421 3.84784 1.10552 5.13279 2.47754 5.35546C3.8397 5.57653 5.1345 4.65202 5.35718 3.27997C5.57825 1.9178 4.64389 0.621374 3.28173 0.400305C1.90971 0.177634 0.623167 1.11362 0.402095 2.47579Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(1.29150390625 1.958740234375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 398' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.791957 0.794469C0.353552 1.23287 0.353566 1.93999 0.791987 2.37841C1.23041 2.81683 1.93753 2.81685 2.37593 2.37844C2.81434 1.94004 2.81432 1.23292 2.3759 0.794499C1.93748 0.356078 1.23036 0.356064 0.791957 0.794469Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.4974365234375 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 399' fill-rule='evenodd' style='fill:white' opacity='1' d='M1.77483 1.77351C0.791957 2.75638 0.791957 4.3403 1.77483 5.32317C2.75064 6.29898 4.34162 6.30605 5.3245 5.32317C6.3003 4.34737 6.3003 2.74931 5.3245 1.77351C4.34162 0.790632 2.75064 0.797703 1.77483 1.77351Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.459228515625 1.9619140625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 400' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.791957 0.794469C0.353552 1.23287 0.353566 1.93999 0.791987 2.37841C1.23041 2.81683 1.93753 2.81685 2.37593 2.37844C2.81434 1.94004 2.81432 1.23292 2.3759 0.794499C1.93748 0.356078 1.23036 0.356064 0.791957 0.794469Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 281' fill-rule='evenodd' style='fill:%23F3D8CC' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.62 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.7891845703125 6.60302734375) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.0640869140625) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 282' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.179424 1.10917C0.0801001 1.72117 0.493538 2.29482 1.10552 2.39414C1.71751 2.49346 2.29115 2.08001 2.39047 1.46801C2.4898 0.856004 2.07636 0.282355 1.46437 0.183033C0.852386 0.0837119 0.278748 0.497165 0.179424 1.10917Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.811767578125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 283' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486625 2.2985 1.09004 2.44098C1.69346 2.58347 2.29499 2.21175 2.43747 1.60834C2.57995 1.00493 2.20823 0.403399 1.60482 0.260915C1.0014 0.118432 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.736328125 5.365478515625) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 284' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.22997 0.0200002L0.179996 0.370003C0.0299993 0.430004 -0.039999 0.600005 0.0299993 0.760007L0.259994 1.24001C0.339992 1.41001 0.42999 1.59001 0.569986 1.72002C0.719983 1.86002 0.929978 1.92002 1.09997 1.84002C1.24997 1.77002 1.32997 1.61001 1.35997 1.46001C1.36997 1.41001 1.36997 1.36001 1.36997 1.32001C1.36997 1.19001 1.49996 1.12001 1.60996 1.18001C1.72996 1.24001 1.84996 1.29001 1.98995 1.28001C2.09995 1.26001 2.20995 1.22001 2.26995 1.13001C2.43994 0.910008 2.29994 0.650006 2.12995 0.480004C1.94995 0.300003 1.73996 0.140001 1.49996 0.0300003C1.41997 0 1.31997 -0.0100001 1.22997 0.0200002Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 23' fill-rule='evenodd' style='fill:%23FBC600' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.62 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.7874755859375 5.02294921875) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0.065185546875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 24' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.179424 1.10905C0.0801001 1.72105 0.493538 2.2947 1.10552 2.39402C1.71751 2.49334 2.29115 2.07989 2.39047 1.46788C2.4898 0.855882 2.07636 0.282233 1.46437 0.182911C0.852386 0.0835898 0.278748 0.497043 0.179424 1.10905Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(7.81201171875 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 25' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.257388 1.09356C0.114905 1.69697 0.486625 2.2985 1.09004 2.44098C1.69346 2.58347 2.29499 2.21175 2.43747 1.60834C2.57995 1.00493 2.20823 0.403399 1.60482 0.260915C1.0014 0.118432 0.39987 0.490148 0.257388 1.09356Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3cg opacity='1' transform='translate(1.3765869140625 3.6019287109375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 26' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M3.84999 0C1.71999 0 0 1.71999 0 3.84999C0 5.96998 1.71999 7.69997 3.84999 7.69997C5.96998 7.69997 7.69997 5.96998 7.69997 3.84999C7.69997 1.71999 5.96998 0 3.84999 0Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 13' fill-rule='evenodd' style='fill:%23508AA5' opacity='1' d='M20.01 14.69L20.01 5.31C20.01 2.38 17.64 0 14.7 0L5.30999 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.30999 20L14.7 20C17.64 20 20.01 17.62 20.01 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(3.401611328125 8.347412109375) rotate(0)'%3e%3cg opacity='1' transform='translate(1.544189453125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 14' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.12001 0C0.500003 0 0 0.500003 0 1.12001C0 1.74001 0.500003 2.24001 1.12001 2.24001C1.74001 2.24001 2.24001 1.74001 2.24001 1.12001C2.24001 0.500003 1.74001 0 1.12001 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(9.421142578125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 15' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M1.12001 0C0.500003 0 0 0.500003 0 1.12001C0 1.74001 0.500003 2.24001 1.12001 2.24001C1.74001 2.24001 2.24001 1.74001 2.24001 1.12001C2.24001 0.500003 1.74001 0 1.12001 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 4.5596923828125) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 16' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M13.209 0.264999C13.209 0.121 13.088 0 12.943 0L0.265 0C0.121 0 0 0.121 0 0.264999C0 0.409999 0.121 0.530998 0.265 0.530998L12.943 0.530998C13.088 0.530998 13.209 0.409999 13.209 0.264999Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
 rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 148' fill-rule='evenodd' style='fill:%23EF7C00' opacity='1' d='M20 14.69L20 5.31C20 2.38 17.62 0 14.69 0L5.31 0C2.38 0 0 2.38 0 5.31L0 14.69C0 17.62 2.38 20 5.31 20L14.69 20C17.62 20 20 17.62 20 14.69Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(2.1051025390625 5.35791015625) rotate(0)'%3e%3cg opacity='1' transform='translate(2.94921875 2.905029296875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 149' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.809975 0C0.359989 0 0 0.559999 0 1.24C0 1.93 0.359989 2.48 0.809975 2.48C1.24996 2.48 1.61995 1.93 1.61995 1.24C1.61995 0.559999 1.24996 0 0.809975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(11.0673828125 2.905029296875) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 150' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.809975 0C0.359989 0 0 0.559999 0 1.24C0 1.93 0.359989 2.48 0.809975 2.48C1.24996 2.48 1.61995 1.93 1.61995 1.24C1.61995 0.559999 1.24996 0 0.809975 0Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(4.1651611328125 6.294677734375) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 151' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M7.41994 1.98999C6.82995 0.819996 5.40996 0 3.74997 0C2.09998 0 0.679995 0.819996 0.0899993 1.98999C-0.199998 2.56999 0.269998 3.21998 0.969992 3.21998L6.53995 3.21998C7.23994 3.21998 7.70994 2.55999 7.41994 1.98999Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(0 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 152' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M0.380003 2.45001C1.82002 2.78001 4.65004 2.35001 4.88004 0.700003C4.92004 0.430002 4.76004 -0.230001 4.34004 0.0800003C3.89003 0.410002 3.58003 0.870004 3.12003 1.19C2.66002 1.51001 2.13002 1.69001 1.55001 1.66001C1.18001 1.65001 0.770007 1.58001 0.400004 1.67001C0.0700006 1.78001 -0.0800007 2.05001 0.0400004 2.24001C0.0900008 2.33001 0.210002 2.41001 0.380003 2.45001Z'%3e%3c/path%3e%3c/g%3e%3cg opacity='1' transform='translate(10.905517578125 0) rotate(0)'%3e%3cpath id='%e8%b7%af%e5%be%84 153' fill-rule='evenodd' style='fill:%23343231' opacity='1' d='M4.48004 1.67001C4.12004 1.58001 3.71003 1.65001 3.33003 1.66001C2.76002 1.69001 2.22002 1.51001 1.77002 1.19C1.31001 0.870004 0.990009 0.410002 0.550005 0.0800003C0.130001 -0.230001 -0.0300003 0.430002 0.0100001 0.700003C0.230002 2.35001 3.07003 2.78001 4.50004 2.45001C4.67004 2.41001 4.79004 2.33001 4.84004 2.24001C4.96004 2.05001 4.82004 1.78001 4.48004 1.67001Z'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)

' fill-opacity='1' d='M13.5162 36.5582L16.8171 7.39838L26.8677 7.39838L24.4307 31.1178C23.9706 35.5956 20.1985 39 15.6971 39L15.6971 39C14.3871 39 13.3688 37.8599 13.5162 36.5582Z'%3e%3c/path%3e%3cpath fill='url(%23linear_fill_464_15_0)' d='M1.90887 -3.40272e-15L19.6593 -3.40272e-15C24.6175 -3.40272e-15 28.1368 4.83191 26.6158 9.55103L26.6158 9.55103L7.63277 9.54433C3.41687 9.54285 -1.1251e-15 6.12477 -3.50653e-16 1.90887L4.67372e-16 1.90887C5.31926e-16 0.854629 0.854628 -3.53183e-15 1.90887 -3.40272e-15Z'%3e%3c/path%3e%3cpath d='M39.3264 4.77551C39.3264 7.41295 37.1706 9.55102 34.5112 9.55102C31.8518 9.55102 29.6959 7.41295 29.6959 4.77551C29.6959 2.13807 31.8518 0 34.5112 0C37.1706 0 39.3264 2.13807 39.3264 4.77551Z' fill='url(%23linear_fill_464_16)' %3e%3c/path%3e%3cdefs%3e%3clinearGradient id='linear_fill_464_14_0' x1='11.0260009765625' y1='31.335662841796875' x2='23.733642578125' y2='10.45172119140625' gradientUnits='userSpaceOnUse'%3e%3cstop offset='0' stop-color='%236A87FC' /%3e%3cstop offset='1' stop-color='%231F4BFF' /%3e%3c/linearGradient%3e%3clinearGradient id='linear_fill_464_15_0' x1='0' y1='-2.41192626953125' x2='23.84228515625' y2='9.551025390625' gradientUnits='userSpaceOnUse'%3e%3cstop offset='0' stop-color='%236382FC' /%3e%3cstop offset='1' stop-color='%231F4BFF' /%3e%3c/linearGradient%3e%3clinearGradient id='linear_fill_464_16' x1='29.6959228515625' y1='1.625396728515625' x2='36.263671875' y2='7.925628662109375' gradientUnits='userSpaceOnUse'%3e%3cstop offset='0' stop-color='%236A87FC' /%3e%3cstop offset='1' stop-color='%231F4BFF' /%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)