18122393143
18122393143
 18122393143
18122393143

聚焦行业热点资讯 走在新基建建设前沿










点云数据与实景影像融合成果
ContextCapture建模具体过程,请扫描下方二维码,查看教程教学:")

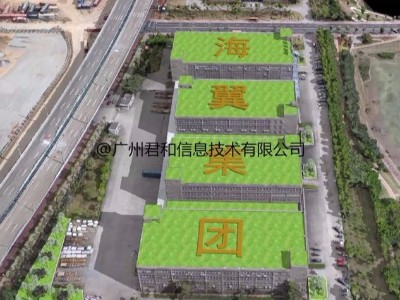
实景建模技术主要通过Bentley Context Capture软件来实现,是近年国际测绘遥感领域发展起来的一项高新技术,主要原理为通过在飞行平台上搭载一台或多台倾斜摄影相机,同时从垂直、倾斜等不同的角度采集影像,通过专业软件进行解析空中三角测量、几何校正、同名点匹配、区域网联合平差等处理

前在测绘领域的主要用途是快速建立精细的地表三维模型,可以替代传统的手工建模和“倾斜影像+激光扫描”的建模方法。》不宜将倾斜摄影技术与传统摄影测量技术进行简单对比,特别是不要就技术的优劣进行争论,因为两者是从不同的方向、以不同的方式、为不同的用途在做研究,仅仅是在目标三维模型的重建这...