18122393143
18122393143
 18122393143
18122393143

聚焦行业热点资讯 走在新基建建设前沿
当前,无人机作为一种快速、有效的影像获取手段,不仅弥补了卫星遥感技术获取数据的不足,还能利用多角度、大范围获取地面纹理信息,为城市三维建模提供重要的技术支持。本文对基于低空无人机影像的城市三维模型构建展开了介绍,分析低空无人机影像城市三维建模的精度评估,并通过研究区域的三维模型、成图结果的精度进行了分析,实验表明:利用低空无人机摄像控制点布设,可达到三维模型精度要求,旨在为有关需要提供帮助。
随着我国城市化建设的不断发展以及科技的日益进步,城市地理信息已从二维转向三维的方向发展,城市三维建模 已成为当前城市建设的重要工作之一,并对城市建设的发展具有重要的促进作用。而低空无人机在城市三维建模中具有广泛的应用,对此,本文展开了相关介绍。
1 低空无人机影像城市三维模型构建
三维模型构建过程主要为外业控制点布设、航拍飞行、内业处理。在建构模型中,因所使用的设备极其昂贵,而且航高较高,飞行中机动灵活较差,通常选择无人6机低空摄影测量的方法进行。多视立体航摄仪重量较重,而无人机载荷较差,难以承载,因而通常选择测轻小型相机进行航拍。无人机多视立体航摄系统是利用多个轻小型非量测相机进行一体化设计而成的。因系统由非量测型相机构成,因而需相机检校标定,以确保其拍摄的准确度。本次研究在实验基础上构建多角度立体化航拍系统,以无人机全流程检测。现将具体情况,以图1形式展现出来。

图1 建模结构图示
2 三维建模精度分析
2.1 城市结构与建模
构建城市模型的关键是微观层面,建立LOD。在划分级别数方面,City GML中将城市三维模型划分为5种级别。详见表1。
级别的差异对于点位精确度也有一定影响,此级别的分级方式在建筑物的应用中适应性较强,对于实际城建而言,却还存在较多不适应之处。城市三维建模技术规范对实际的建筑建模划分方式详见表2。

2.2 控制点布设方案
城市三维建模规范之中在建筑物地形图设计时,轮廓线比例应在1∶500到1∶2000之间。建筑外膜采集纹理过程中,以激光扫描为依托,以摄影测量后实地拍摄为基础。后可借助DOM 数据构建或实地拍摄处理图像纹理。而针对建筑物平面设计过程中,最佳比例应维持在1∶500到1∶2000之间,确保三维模型所得数据与地形数据相契合。
低空数字航空摄影采用1∶1000比例尺进行测量时,其平面/高程精度为1m*0.4m,采用1∶500比例尺进行测量时,平面/高程精度为0.5m*0.4m。按照城市三维建模技术规范的相关规定,建筑模型的平面/高程精度为0.5m*0.5m,三维模型数据与地形图数据套合。
结合上述要求,城市三维模型确定经地空航空拍摄,可节省人力物力,图像收集的效果较好。低空航拍结合数字化技术应用于三维模型建立之中,还应对各控制点的设计与安排制定严格规范。常规低空无人机拍摄时可以较高的精度完成定位任务,可见主要的两布点,即全野外布点和区域网布点。该布点模式之中全野外布点模式也可分为全能和综合两种,需针对具体实际情况进行改善。城市构建可通过野外布点大幅度增加不必要工作量,可广泛运用区域网布局点进行建设。
本文中构建建筑三维模型中的相关数据主要来源于轻小型多视立体航摄仪航摄,该设备由中测新图(北京)遥感技术有限责任公司提供,焦距:下视35mm,侧视55mm。像元4.9μm,下视焦距35mm,以1∶1000为图示比例,设定航拍高度为571m,具体实施航拍,详见表3。

如表3所示,1∶1000连接点平面和高程误差分别是0.35m、0.28m,通过转换为图形将平面和高分别调整为0.7mm、0.56mm。
无人机航拍过程中,相邻平面控制点间隔基线计算:

其中,mq 值为0.005mm;K 值为16;n3+2n+46=31.252;基线n=10条。
按照1∶1000比例尺,4-5条航线计算。
相邻高度控制点基线计算:

其中,mq值为0.005mm;
H值为570m;
b值为4.8mm;
n3+23n+100=26.72;基线为n=7条。
经计算分析,7条航线应布设一个平高点,旁向航线均布设平高点。在布设检查点中,检查点应均匀在建模区域内,其位置应远离控制点位置,两者不可在同一位置。放顶检查可占据2/3比例,而地面点位可占1/3比例。
3 试验情况
3.1 测区概况
此次试验中航摄面积约4km2,区域范围坐标见表4。

3.2 试验设备情况
ZC-2无人机的使用,可清晰观察建筑具体情况,便于建筑设计及布局。其作为本次实验的重要环节,改装无人机型具有明显的优势。其质量较小,飞行姿态稳定,维护成本较低。
本次试验可考虑以TOPDC-5UA 遥感传感器五视立体航拍设备航拍,其可准确传回信号,可稳定同步曝光,运行可靠性高。参数设置较为简便,还可调整远程姿态,便于连接和拔除。具体内容如图2所示,相机参数如表5所示。

图2 遥感器为TOPDC-5UA的遥感系统

3.3 布设控制点及获取影响情况
控制点布设及影响获取实验中,本次共布设控制点53个。其中,共有8个方顶点,11个检查点布设。在本次试验中,共设有航拍飞行线14条,总长度85km。航线可完全覆盖测区,呈像清晰。
本次所用无人机航拍面积共4km2,约可见建筑面积1.5km2,高度可达570m,分辨率为0.08m,共拍摄3000余张像片。
4 数据处理与分析
4.1 数据处理
使用Photoscan软件进行处理数据,其中包括影像、POS数据、相机检校数据、控制点数据。新建工程,将影像导入,并分为前、后、左、右、下视5组,将POS值导入,对初始值进行匹配,后输入校验相机取得参数。将影像的匹配定向操作,与POS数值相结合取得相机校验参数。这一过程中软件可自动生成系数点的运输局,并根据所得数据及结果调整相关错误照片匹配,保证所得坐标精度能满足要求。加入相应的控制点并刺在影像上,计算平差,评估控制点和匹配点的粗差值,控制点误差超出要求则继续调整,删除误匹配点。去掉匹配错误的位置后,在云端进行密集点匹配,再通过软件生成三角网。针对三角网进行编辑与处理后行贴纹处理,后将模型于软件内部模型生成,将其以文件形式输出。
4.2 数据分析
控制点精度及检查点精度具体情况,如图3所示。
计算相关数据后发现,控制点平面及高程中,最大误差数据为±0.38m。所有达到空三规范的各控制点及平面误差结果均为0.4m以下。后针对各大检查点进行检查,可知平面及高程误差分别为0.45m和-0.58m。空三规范的1∶1000达标数据中检查点的平面差值居多限定在0.7m,高程差值最多限定在0.6m。建模工作完成后,需对13个模型进行测量。得到其坐标后对比实地与室内坐标差异,计算与之相对应的数值。本次建模测量数据相比,三维模型的点平面差值为0.47m,高度为0.52m,总平面及高程标准偏差分别为0.25m、0.08m,表明利用低空无人机摄像控制点布设,可达到三维模型精度要求如图4所示。

图3 控制点、检查点精度分析示意图

图4 模型精度分析
5 结束语
城市三维建模过程中精度是模型的关键,其影响到模型的可靠性,关系到城市未来的发展。因此,在进行城市三维建模过程中,必须重视对精度的评估。本文介绍了低空无人机影像控制点布设的具体操作过程,经实验证实,使用该方法评估城市三维建设模型的精度,具有较高可行性,值得进行推广。

土石方工程量的核算往往是工程预算与结算中的争议与焦点,然而运用天星系列多镜头倾斜摄影测量系统的实景3D建模方法模拟土方石的开挖与回填,可以让施工方直观有效地开展土石方的挖运分析与运算
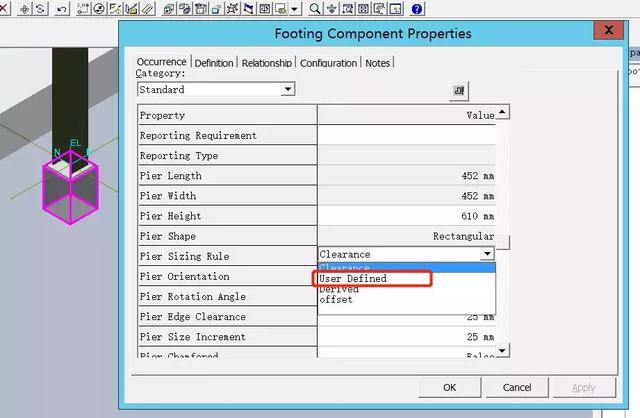
右键属性,并切换至Relationship 通过该界面跳转至Footing ComponentSmart3D结构建模,Footing尺寸调整操作 切换至Occurrence,下拉找到 Sizing Rule 将Sizing Rule属性调为User Defined 修改后,尺寸相关属性即为可编辑状态